行政院國家科學委員會專題研究計畫 期中進度報告
Multi-Agent 分散式交通監控系統(1/2)
計畫類別: 個別型計畫 計畫編號: NSC93-2218-E-009-035- 執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立交通大學電機與控制工程學系(所) 計畫主持人: 徐保羅 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 94 年 7 月 5 日
行政院國家科學委員會補助專題研究計畫
□成果報告
■期中 進度報告
Multi-Agent 分散式交通監控系統 (1/2)
計畫類別:■ 個別型計畫 □ 整合型計畫
計畫編號:NSC 93- 2218 - E - 009 - 035
執行期間: 93 年 8 月 1 日至 94 年 7 月 31 日
計畫主持人: 徐保羅
共同主持人:
計畫參與人員:
成果報告類型(依經費核定清單規定繳交):
■
精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管計
畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:
中 華 民 國 94 年 7 月 5 日
I. 中文摘要:
我們使用 wireless 802.11b 的點對點傳輸模式(ad hoc mode),來建構交通控制多重智慧型代 理人的網路傳輸介面,無可避免地,我們會遇到許多無線傳輸方面的問題,例如隱藏節點問題 (Hidden Terminal Problem)造成的封包碰撞(collision),這將使得網路品質下降。因此我們使用 NCTUns2[1]做為我們的網路模擬平台,並針對方格狀路網的網路建置問題,做詳細的探討,最後提 出一個網路架構,使用 Channel Allocation Procedure 方法,期待能解決封包碰撞的問題,並且 提高資料傳輸速率(Throughput)。
在此份報告中將分兩部分討論我們現在已經完成的交通控制相關研究:第一部份為我們利用德 國卡斯魯爾大學(University of Karlsruhe)與德國 PTV 交通顧問公司(PTV System Software and Consulting AG)所共同發展的交通路網模擬軟體 ─ VISSIM,建置單一路口汽車行進的情形;第二 部分我們利用 MATLAB 現有的 Fuzzy Toolbox 建立模糊法則進行交通號誌是否變號的運算。未來 我們將整合無線網路與交通燈號控制,達成交通控制網路之監控目的。
關鍵字:無線網路,模糊控制,交通監控。
Abstract:
In this study, the wireless 802.11b is adopted for the ad hot mode communication. Furthermore, the intelligent multi-agent systems will be applied to monitoring and control of the traffic network system. Since the traffic of communication will degrade the quality of the present system, the NCTUns2[1] will be used for the simulation study. Then, the Channel Allocation Procedure will be adopted to improve the data throughput rate.
Moreover, the VISSIM software will be adopted to simulate the application of fuzzy control of the traffic management. The fuzzy control will be simulated via the MATLAB. In the future, integration of fuzzy control and the wireless network will be applied to as a multi-agent monitoring and control system for the traffic management system.
Keywords: wireless, fuzzy control, traffic monitoring and management
I. Introduction
1. MAC protocol載波偵測(carrier sense)表示當一部電腦要傳送資料前,會聆聽網路上是否有其他電腦正在 傳資料,若有,則會等待一段時間,確定沒有其他電腦傳送時,才會將資料傳送。
若兩部電腦同時傳送資料,則資料發生碰撞,則電腦須等待一段時間再行重傳,不過就無線網 802.3 CSMA/CD (Carrier Sense Multiple Access with Collision Detection)
圖二、(a)node2 與 node3 之間沒有屏障、(b)node2 與 node3 之間具有屏障
路而言,由於彼此並沒有相連的介面,因此無線網路採用的是 CSMA/CA,先行偵測工作頻帶的電磁 波能量,超過標準則判定頻道被佔用,若工作頻帶沒有被佔用,則等待 backoff time 之後再行傳 輸。
2.隱藏節點問題(Hidden terminal problem)
圖一、三個節點的隱藏節點問題
如圖一,我們假設 node2 與 node3 彼此有屏障,以至於無法得知對方是否正在傳送資料給 node1, 因而很容易地產生隱藏節點的問題,並且造成資料遺失。我們做了以下的比較。由圖二,可以很明 顯的看出,隱藏節點問題不僅使資料傳輸速率變得不穩定,並且降低了整體的傳輸速率(可由 node1 的 throughput 看出)。
II. Network Performance on Traffic Street Controlling
我們先假設一個3 â 3的一個路網架構,如圖三,每個節點相距 200 公尺,每個點只需獲取周
圍四點的資訊,即可以達成 agent 的要求。這樣基礎形態的網路架構包含了三種形式的無線傳輸節 點,分別是 1.角落、2.邊緣、3.中央,而我們選用 node1、node2 以及 node5 作為代表。
圖三、3 â 3路網架構在 NCTUns2 上的模擬 在此,我們選用了兩種指標作為分析的依據,分別是 1.Throughput(資料傳輸速度)以及 2.Collision(封包碰撞)。 圖四、3 â 3交通路網內,節點的 Throughput 比較 從圖四,我們可以觀察出 Node5 在整個網路的競爭下,由於面臨到周圍四點的同時傳輸行為, 造成了資料封包的大量碰撞,使得穩定之後的傳輸速率小於 48kbps,而 node1 與 node2 的資料傳 輸速度也遠小於沒有干擾情形的 760kbps(由圖二(b)可觀察出),這說明了在方格狀路網的架構 下,傳輸品質嚴重下降,網路面臨極大的挑戰。
圖五、3 X 3 交通路網內,節點的 collision 比較 如圖五,我們利用了 collision 這個指標來直接觀察隱藏節點問題所帶來的影響,由上圖我們 可以清楚看到 node5 發生 collision 的值最大,明顯地,這三種類型的節點面臨到不同程度的封包 碰撞問題。 若我們將這樣的點對點網路,擴大成一個更大型的網路,則會包含了更多像是 node5 型態的節 點,處於整個網路的中間,面臨到周圍四點的網路競爭,整體網路品質必定無法滿足 multi-agent 的交通路網控制系統。
III. Channel Allocation Procedure
為了解決先前我們所發現到的問題,我們必須先了解到 802.11b 使用的是 2.4GHz ISM band, 提供了 13 個 channel 以供使用,而先前的研究[2]指出,實際佈置網路時,可選用 channel 1,5,9,13 在同一區域使用,使彼此的交互干擾降到最低,因而我們規劃了一個動態變換頻率通道的方法,稱 之為 Channel Allocation Procedure,如圖六所示,Active nodes 會主動的變換 channel,依序跟前左 後右的 node 溝通。
圖六、Channel 的選用以及設置
如圖七所示,我們可將 Active nodes 與 passive nodes 交錯排列,其中 passive nodes 保持 的固定的 channel,我們可將網路擴大,看出我們 channel 規劃的規則。
圖七、Channel Allocation Procedure 方法設置在大型網路的情形與規則
在此點對點(ad hoc)網路的規劃下,一段時間內,每個點都只跟相鄰且具同樣頻道的節點作通
訊溝通,這樣的做法也避免掉在同一區域內,與使用同樣頻道的其他網路,所造成的交互干擾,當 然也就省去了隱藏節點的問題,達到降低 collision 的情形。之後我們會將這樣的 Channel Allocation Procedure 的方法,藉由 NCTUns2 平台,模擬我們所需要的無線模組,以分析報告驗 證我們預期的結果。
IV. 交通路網建置
我們利用 VISSIM 4.0 版本建構單一十字路口的模型,即同時具有東西向及南北向之來車。在正式 建構之前,有幾項我們預設的條件須事先說明:首先,在此模型中我們不考慮右轉車輛的存在,這 項假設是為了避免右轉車輛佔據紅綠燈路口,使欲通過號誌路口的直行車輛回堵,進而造成號誌控 制上判斷的干擾,所以在這個模型中,不考慮右轉車輛。其次,每個車輛行進方向皆為雙線道,其 中外側車道僅提供直行,而內側車道同時具有直行和左轉方向的選擇性,此項假設符合大多數台灣 現存交通路口之情形;再者,我們將對向號誌設為同一個群組,達到同步號誌控制的目的,並在此 先採用固定時間(fixed-time)的號誌控制。 一個路口的建置包含了以下幾個項目: 1、 上游路口端車輛放置:東西向:1000 Veh/hr;南北向:800 Veh/hr。2、 紅綠燈號誌設立:Cycle Time:100 sec;綠燈時間:45 sec;黃燈時間:3 sec;雙向全 紅:2 sec。
3、 轉向比分配:內側車道車輛行進方向具有直行與左轉兩種,因此我們必須設立直行車 與轉彎車的比例。我們將東西向之直行車與左轉車比例設為 90%:10%;南北向比例設為 80%:20%。
4、 Detectors 放置:我們希望藉由放置感測器得到 Traveling Time 與 Delay Time,此兩項 參數可作為交通評估的性能指標。
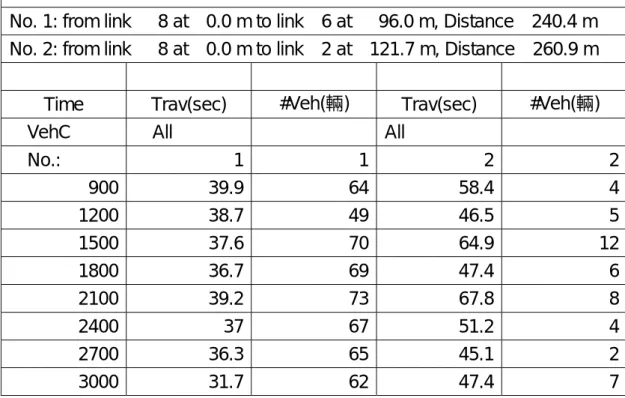
當上述四點都設置完成後,一個簡單十字路口的雛形大致完成,但我們仍需藉由設定車輛種類的組 成比例、直行車與轉彎車輛的優先權等選項使我們的模型更符合現實環境需求。 上圖為架設完成後,VISSIM 的模擬情形。接著我們將藉由下圖九表示感測器放置位置,並由表(1) 說明所量測到旅行時間的意義(此處以二個 link 的連結為例)。 我們可藉由放置在不同起訖點的感 測器量測不同路徑的旅行時間,所謂的旅行時間為從起點至終點在沒有任何車輛與號誌干擾下所花 以下為表(1)各參數所代表意思的說明: a. 各評估路段資料:各評估路段或路徑的起訖點位置及長度。 b. Time:資料的時間。 c. VehC:車種。 d. Trav:平均旅行時間,在評估時間內經過起點至迄點位置及長度車輛之平均旅行時間。此 Path_1 Path_2 圖九、 旅行時間感測器之位置
項可作為評估指標之一。
e. #veh:在評估時間內經過起點至迄點間的所有車輛數。
Table of Travel Times
No. 1: from link 8 at 0.0 m to link 6 at 96.0 m, Distance 240.4 m No. 2: from link 8 at 0.0 m to link 2 at 121.7 m, Distance 260.9 m
Time Trav(sec) #Veh(輛) Trav(sec) #Veh(輛)
VehC All All
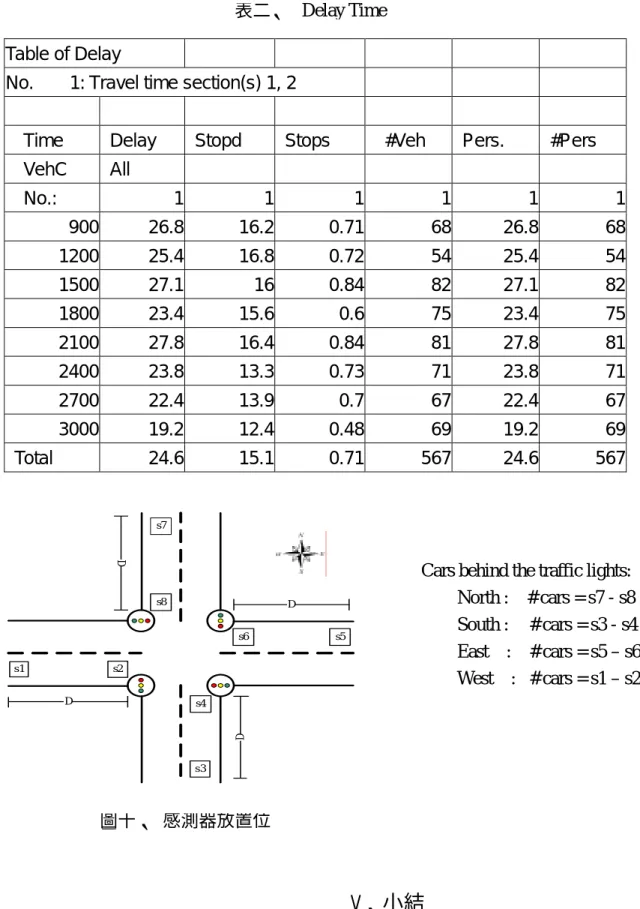
No.: 1 1 2 2 900 39.9 64 58.4 4 1200 38.7 49 46.5 5 1500 37.6 70 64.9 12 1800 36.7 69 47.4 6 2100 39.2 73 67.8 8 2400 37 67 51.2 4 2700 36.3 65 45.1 2 3000 31.7 62 47.4 7 在量測 Traveling Time 的同時,我們可以使用相同的感測器,即圖九所放置的位置,在設定參數後, 得到另一個性能指標延滯(Delay Time);一般在交通的評估上,經常以 Delay Time 作為評估的要點。 表二所得之 Delay Time 為 Path_1 與 Path_2 的平均值。各參數所代表意思的說明如下:
a. Delay Segment:Delay Segment 所包含的路段或路徑。 b. Time(sec):資料時間。 c. VehC:車種。 d. Delay(sec):平均每車延滯,實際的旅行時間與理想的旅行時間之差。 e. Stopd(sec):平均每車停等延滯,車輛完全停等之時間。 f. Stops(次):平均停等次數。 g. #Veh(輛):完全通過評估路段的車輛數。 h. Pers(sec):平均每人延滯。 i. #Pers(輛):完全通過評估路段的乘客數。 在此使用感測器的目的是希望得到路網中具有代表意義的性能指標,這對於未來我們結合模糊 控制法則後,所設計的適應性號誌控制邏輯能藉由這些性能指標作評比。為了確立我們所設計模糊 法則的可行性,在此先運用 MATLAB 的 Fuzzy Toolbox 進行模擬。我們採用三個輸入變數:1.Cars Behind Red;2.Cars Behind Green;3.Cycle Time ,一個輸出變數:Probability Change,利用上述變 數的歸屬函數(Membership Functions)建立交通號誌時間控制法則,由於輸入參數有三個,其所造成 的控制法則高達 150 條,因此我們將設立一些條件式減少控制法則的數量。由下圖(4)說明感測器 放置位置,以量測我們所需使用的變數資料。
表二、 Delay Time
Table of Delay
No. 1: Travel time section(s) 1, 2
Time Delay Stopd Stops #Veh Pers. #Pers VehC All No.: 1 1 1 1 1 1 900 26.8 16.2 0.71 68 26.8 68 1200 25.4 16.8 0.72 54 25.4 54 1500 27.1 16 0.84 82 27.1 82 1800 23.4 15.6 0.6 75 23.4 75 2100 27.8 16.4 0.84 81 27.8 81 2400 23.8 13.3 0.73 71 23.8 71 2700 22.4 13.9 0.7 67 22.4 67 3000 19.2 12.4 0.48 69 19.2 69 Total 24.6 15.1 0.71 567 24.6 567 s1 s2 s4 s3 s6 s5 s8 s7 D D D D
V、小結
相關之模糊控制,目前正研發中, 外來將參考已有之模糊控制系統 [4],並將予以簡化,並 配合多代理人系統,並將整合無線網路,將所有之交通網路系統予以整合,建立智慧型交通監控系 統,。 圖十、 感測器放置位 置Cars behind the traffic lights:
North : # cars = s7 - s8
South : # cars = s3 - s4 East : # cars = s5 – s6 West : # cars = s1 – s2
VI. References
[1] S. Y. Wang, C. L. Chou, C. H. Huang, C. C. Hwang, Z. M. Yang, C. C. Chiou, and C. C. Lin, "The Design and Implementation of the NCTUns 1.0 Network Simulator", Computer Networks, Vol. 42, Issue 2, June 2003, pp.175-197.
[2] J. A Park, S. K. Park, P. D. Cho, K. R. Cho, “Analysis of Spectrum Channel Assignment for IEEE 802.11b Wireless LAN”, in IEEE CNF, Proceedings of The 5th International Symposium on Wireless
personal Multimedia Communications, Hawaii, U.S.A, Oct. 2002 pp.1073 – 1077.
[3] M. S. Gast, 802.11 Wireless Networks: The Definitive Guide, O’Reilly, 2002.
[4] D. Kaur and E. Konga, "Fuzzy Traffic Light Controller", Proc. of 37th Midwest Symposium on