D.-S. Huang, K. Li, and G.W. Irwin (Eds.): ICIC 2006, LNCS 4113, pp. 655 – 662, 2006. © Springer-Verlag Berlin Heidelberg 2006
An Integration Method of Artificial Neural Network
and Genetic Algorithm for Structure Design of a Scooter
Jinn-Jong Sheu1 and Chi-Yuan Chen2
1 National Kaohsiung University of Applied Sciences, No. 415 Chien Kung Road,
Kaohsiung 807, Taiwan [email protected]
2 Kaohsiung Rapid Transit Corporation, No.1 Tung-An Road
Kaohsiung 806, Taiwan [email protected]
Abstract. In this paper, an integration method of the artificial neural network
(ANN) system and the genetic algorithms (GA) was proposed. Computer aided engineering (CAE) simulations and experiments were carried out to analyze the deformation of a four-wheel scooter under different loading conditions. A pro-totype of scooter structure was built to verify the simulation and design results. The simulation results of stress, strain and displacement data were adopted for the training and testing of the developed ANN system. The trained ANN system was integrated with the optimization system based on the genetic algorithm to determine the most suitable combination of the structure design. The material types, topological configurations and section geometries of structural beams were taken into consideration of design. The predicted deformation results of the ANN system were in good agreement with the CAE and experiment data.
1 Introduction
The ANN system researchers were trying to mimic the working system of a real neu-ron. McCulloch and Pitts [1] proposed the “MP model” and defined the synapse with the properties of weighting and transferring method. Hebb proposed the “Hebbian learning rule” discussing the method of changing weight of a synapse. If the con-nected neurons are activated, the weight of the synapse connecting these two neurons will be increased. Rosenblatt [2] combined the MP model and Hebbian learning rule to create the perceptron model of an artificial neural network. The functions of a neu-ron in ANN system were able to be described in a completely mathematical form.
Rumelhart et al. [3] proposed the “generalized delta rule” to adjust the weights of a multilayer perceptron by using the gradient steepest descent method. A back-propagation (BP) procedure was adopted to minimize the error of the prediction. Hol-land [4] proposed a genetic algorithm based on the theme of “the survival of the fit-test”. The design parameters of an engineering problem were coded into chromo-somes and the better design was obtained via the genetic evolution. Yang et al. [5] proposed a genetic programming method to optimize the structure of truss. The al-lowance stress and buckling condition were considered in the fitness function. The existing methods of scooter’s structure design in the workshop are based on the trial-and-error process. This paper proposed a systematic method to analyze and design the structure of a scooter.
656 J.-J. Sheu and C.-Y. Chen
2 Mathematical Model
In this paper, an artificial neural network system was integrated with the genetic algo-rithm to predict deformation and obtain the optimal design of a scooter’s structure.
2.1 The Artificial Neural Network System
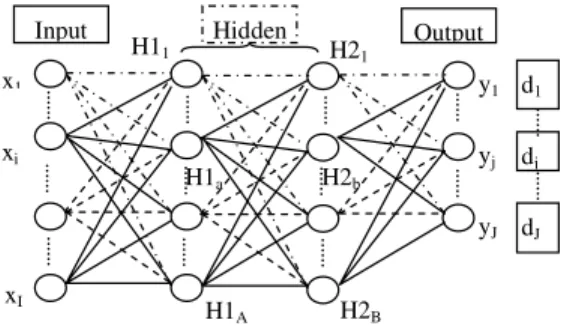
A supervised feed forward learning and back propagation network was adopted. The structure of an artificial neural network system with two hidden layers was shown in Fig. 1. The concepts of MP model and generalized delta rule were adopted.
Hidden Input Output x1 xI xi H11 H1A H1a H21 H2B H2b y1 yJ yj d1 dJ dj
Fig. 1. Schematic diagram of the proposed ANN model shows two hidden layers
In Fig. 1, the input and output neuron numbers were not limited. The hidden layer numbers can be chosen arbitrarily. The neurons were created in the input layer(x), hidden layers (H) and output layer (y), respectively. The desired outputs (d) were compared with the prediction and the errors were minimized to obtain the converged training data. A sigmoid activation function was calculated and controlled the excite-ment or restraint of a neuron. A back propagation process was performed to minimize the error function. A modified steepest descent method was developed to modify the weight of neurons and minimize the error. The increment of weight of the jth neuron at the mth iteration was given by
( )
( )
1 1 + ∆ − ∂ ∂ − = − + = ∆ m ji ji ji ji m ji w w E t w t w w η α . (1)where t represents the last step, i is the index of the previous neuron connected to j,
η and α are the learning rate and momentum terms, respectively.
2.2 The Genetic Algorithm of the Optimization
A genetic algorithm was adopted to find an optimal design of a scooter’s structure. The general form of an optimization problem is described by
An Integration Method of Artificial Neural Network and Genetic Algorithm 657
subject to li xi ui . (2b)
where the design variable xi was bounded by the lower and upper limits liand ui,
re-spectively. An encoding process was adopted to convert the design variables of opti-mization into the chromosomes of GA. The bit numbers of a binary chromosome, ni,
required for resolution R of the ith design variable was given by 5 . 0 2 log ) 1 ) / ) log((( + » ¼ º « ¬ ª − + = u l R n i i i . (3)
The reproduction, crossover and mutation process was repeated from generation to generation. A fitness function of chromosome C was defined by
fit(C)= 3.-Delat - Sigma – Epsilon . (4)
where Delta, Sigma and Epsilon are the normalized maximum displacement, von Mises stress and strain, respectively. It is required to find the displacement, stress and strain in the fitness function.
During reproduction, the chromosomes with higher fitness have higher priority to be kept and reproduced. The roulette wheel method was adopted to select the chromo-some of crossover. A single point crossover method was adopted to obtain the mating result. A mutation process was adopted to produce new generation more divergently. The optimized chromosomes were decoded to obtain the real design variables. The value of a design variable, xi, is decoded by using
i n i i i i l l u D x i ¸¹+ · ¨ © § − − × = 1 2 . (5)
where Di is the decimal value of the ithchromosome related to the variable xi.
2.3 The Integration of Genetic Algorithm and ANN Model
The fitness value of GA was calculated using the predicted displacement, stress and strain of the integrated ANN module. The new designs were created by GA module and evaluated by the ANN prediction. This integration makes it possible to find the optimal design automatically.
3 Implementation and Verification of the Proposed Model
3.1 The Implementation of the ANN Model
The proposed ANN model was implemented by using the C++ language. The training and testing data were prepared by using the CAE simulations. The design parameters adopted in the scooter design were shown in Table 1. The desired outputs were the maximum displacement (mm), von Mises stress (Mpa) and equivalent strain (10-3) of the structure. The mesh model and loading boundary conditions of a scooter were shown in Fig. 2. The experimental measurement locations were indicated by circles. The section types of tube in the longitudinal direction were same. The lateral direction adopted the same criterion. The loads, Fz and Fy , were applied in the vertical and
662 J.-J. Sheu and C.-Y. Chen
the experimental results. The errors of quality prediction of the proposed system were smaller than Taguchi method. It demonstrated the proposed integration method of GA and ANN was able to find the optimal design and predict the deformation precisely.
References
1. McCulloch, W.S., Pitts, W.H.: A Logical Calculus of the Ideas Imminent in Nervous Activ-ity. Bulletin of Mathematical Biophysics, 5 (1943) 115–133
2. Rosenblatt, F.: The Perceptron: A Probabilistic Model for Information Storage and Organi-zation in the Brain. Psych. Rev, 65 (1958) 386–408
3. Rumelhart, D.E., Hinton, G.E. Williams, R.J.: Learning Internal Representations by Error Propagation. In: Rumelhart, D.E., McClelland, J.L.: Parallel Distributed Processing: Explo-rations in the Microstructure of Cognition. MIT Press, Cambridge, (1986) 318-362
4. Holland, J.H.: Adaptation in Natural and Artificial System. University of Michigan Press, Ann Arbor, MI (1975)
5. Yang, Y., Soh, C. K.: Automated Optimum Design of Structures Using Genetic Program-ming. Computers and Structures, 80 (2002) 1537-1546