國立交通大學
電機與控制工程學系
碩士論文
基於馬達電流量測之
行動輔助機器人順應性控制
Compliance Control of a Walking Helper
Based on Motor Current Measurement
研 究 生:林振暘
指導教授:宋開泰 博士
基於馬達電流量測之
行動輔助機器人順應性控制
Compliance Control of a Walking Helper
Based on Motor Current Measurement
研 究 生:林振暘 Student: Chen-Yang Lin
指導教授:宋開泰 博士 Advisor: Dr. Kai-Tai Song
國 立 交 通 大 學 電 機 與 控 制 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering October 2008
Hsinchu, Taiwan, Republic of China
i
基於馬達電流量測之
行動輔助機器人順應性控制
學生:林振暘 指導教授:宋開泰 博士 國立交通大學電機與控制工程學系摘要
本論文應用全向式移動平台設計了一個行動輔助機器人。行動輔助機器人提供老年 人在行動上的輔助,使老年人可以安全且穩定的行動。透過本論文所提出的順應性移動 控制器行動輔助機器人會順應著使用者施力方向而移動並根據力的大小調整其速度。本 文採用量測全向式移動平台上的馬達電流以及轉速去推算出行動輔助機器人所受的外 力大小及方向。透過電腦模擬發現估測器可以得到施力的資訊,並且透過順應性控制器 達成行動輔助機器人的順應性移動行為。實驗結果驗證,經由機器人之馬達的電流及轉 速回授,可以估測出使用者的施力,並且根據此估測結果完成行動輔助機器人的順應性 移動,而經由調整順應性控制器之動態模型參數,則可滿足使用者對行動輔助機器人之 順應性的需求。ii
Compliance Control of a Walking Helper
Based on Motor Current Measurement
Student: Chen-Yang Lin Advisor: Dr. Kai-Tai Song Department of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
An omni-directional mobile robot has been designed and constructed to work as a robotic walking helper of elderly people. The robotic walking helper has a handrail to assist the elderly to walk safely and stably. In such application, the motion compliance is required in accordance with the applied force of a user. This thesis presents a novel compliance motion control design for the omni-directional motion platform. In this design, an external force observer is developed based on motor current and speed measurement without using an expensive force/torque sensor. Computer simulations show that the compliance of the omni-directional walking helper can be adjusted by setting damping and stiffness coefficients of the overall dynamical system. Practical experiments validate the simulation results. It is demonstrated that the external force observer successfully estimates the pushing as well as pulling force of a user on the platform handrail. The velocity of the omni-directional walking helper is adjusted according to the inferred motion intention as expected.
iii
誌謝
謹向我的指導教授宋開泰博士致上感謝之意,感謝他三年多來給於我許多在生活處 事上的意見以及專業研究上的指導,以他豐富的學識與經驗,配合理論的應用,使得本 論文得以順利完成,且無論在知識或生活等各方面都收穫良多。 感謝學長奇謚、嘉豪及孟儒在實做及理論上的指導,以及感謝與我共同奮鬥的同學 富聖、俊瑋、濬尉及志昇的相互鼓勵及提攜,同時也感謝學弟弘哲、兆戊、煥坤、仕傑、 裕宏及科棟在研究途中的協助及在生活上帶來的樂趣。 最後,特別感謝我的父母以及所有家人,由於他們的辛苦栽培與鼓勵,在生活上給 予我細心地關愛與照料,並支持我就讀碩士學位,使得我才得以順利完成此論文,在此 我願以此論文獻給我最感激及最偉大的父母親以及最敬重的大舅。iv
目錄
中文摘要...i 英文摘要...ii 誌謝...iii 目錄...iv 圖例...vi 第一章 緒論...1 1.1 研究動機...1 1.2 相關研究回顧...1 1.3 問題描述...7 1.4 章節說明...7 第二章 行動輔助機器人設計...8 2.1 本體設計...8 2.2 硬體介紹...9 2.2.1 硬體架構...10 2.2.2 速度控制系統...10 2.2.3 電流感測系統...12 2.3 行動輔助機器人之運動控制...14 2.3.1 運動模型推導...15 2.3.2 里程計設計...19 2.3.3 位置控制...20 2.3.4 位置控制實驗...21 2.4 行動輔助機器人系統架構...22 第三章 施力估測器與順應性控制...24 3.1 無力覺感測器之外力估測器設計...24v 3.1.1 單軸馬達之外力估測器...24 3.1.2 行動輔助機器人之整體施力估測器...26 3.1.3 參數鑑定...30 3.2 行動輔助機器人順應性控制架構...34 3.2.1 順應性控制架構...34 3.2.2 參數設定之影響...36 第四章 實驗結果...38 4.1 單軸馬達模擬與實驗結果...…...38 4.1.1 單軸馬達外加施力估測模擬...…...38 4.1.2 單軸馬達施力估測與順應控制實驗...…...40 4.2 行動輔助機器人外加施力估測器模擬...41 4.3 行動輔助機器人之順應性控制模擬與實驗...46 4.3.1 行動輔助機器人之順應性控制模擬...46 4.3.2 行動輔助機器人之順應性控制實驗...49 4.3.3 順應性控制器參數變化的影響...54 第五章 結論與未來展望...55 參考文獻...56
vi
圖例
圖 1-1、日本東北大學 Pf. Kosuge Lab 之 RT Walker...………...2
圖 1-2、 Omni RT Walker……….……….……….3
圖 1-3、 PAMM SmartCane prototype……….……….……….4
圖 1-4、 PAMM SmartWalker prototype……….……….…………..4
圖 1-5、 Care-O-bot II……….……….………..5 圖 1-6、 XR4000………..…….………..6 圖 1-7、 CMU Pearl 看護機器人……….………..6 圖 2-1、行動輔助機器人設計圖………....………8 圖 2-2、行動輔助機器人………..………..9 圖 2-3、行動輔助機器人硬體架構圖………..………10 圖 2-4、速度控制卡………..………11 圖 2-5、伺服驅動器………..………11 圖 2-6、訊號轉換電路方塊圖………..………12 圖 2-7、電流感測板電路方塊圖………..………13 圖 2-8、電流感測板………..………13 圖 2-9、電流感測板校正結果………..………14 圖 2-10、運動控制架構圖………15 圖 2-11、行動輔助機器人運動示意圖………..………..………16 圖 2-12、當機器人朝向角為 0 時 Pi與 Di定義圖……….………16 圖 2-13、位置運動控制方塊圖………..………..20 圖 2-14、運動坐標軌跡圖…………..………21 圖 2-15、運動朝向角軌跡圖…………..………..22 圖 2-16、行動輔助機器人系統架構圖…………..………..23
vii 圖 3-1、單軸馬達力矩示意圖………..………24 圖 3-2、單軸馬達之外加施力估測器方塊圖…..………26 圖 3-3、行動輔助機器人之力幾何圖..………27 圖 3-4、行動輔助機器人之施力估測器方塊圖………..29 圖 3-5、X 軸方向行走的力估測結果……….………….….31 圖 3-6、X 軸方向行走的電流資訊……….………….…….32 圖 3-7、Y 軸方向行走的力估測結果……….………….….32 圖 3-8、Y 軸方向行走的電流資訊……….………….…….33 圖 3-9、Z 軸方向旋轉的力估測結果……….………….….33 圖 3-10、Z 軸方向旋轉的電流資訊……….…..……….…….34 圖 3-11、順應性模型圖………35 圖 3-12、順應性控制架構………35 圖 3-13、M 對速度的影響模擬……….…36 d 圖 3-14、D 對速度的影響模擬……….…37 d 圖 4-1、單軸馬達外力估測與順應性控制架構圖……….………….……38 圖 4-2、單軸馬達施力估測模擬結果………..………39 圖 4-3、單軸馬達順應性控制的施力與電流的實驗結果..………40 圖 4-4、單軸馬達順應性控制實驗時的轉速………..41 圖 4-5、行動輔助機器人在無移動下的外力估測模擬結果………..42 圖 4-6、在無移動下施予外力的電流變化………..42 圖 4-7、行動輔助機器人在 X 軸方向移動的外力估測模擬結果………43 圖 4-8、在 X 軸方向移動下施予外力的電流變化………..…43 圖 4-9、行動輔助機器人在 Y 軸方向移動的外力估測模擬結果………..…………44 圖 4-10、在 Y 軸方向移動下施予外力的電流變化………44 圖 4-11、行動輔助機器人在 Z 軸方向旋轉的外力估測模擬結果……….45
viii 圖 4-12、在 Z 軸方向旋轉下施予外力的電流變化……….45 圖 4-13、X 方向之順應性控制模擬……….…46 圖 4-14、X 方向之順應性控制模擬的馬達電流結果……….……47 圖 4-15、Y 方向之順應性控制模擬……….…47 圖 4-16、Y 方向之順應性控制模擬的馬達電流結果……….……48 圖 4-17、Z 方向之順應性控制模擬……….…48 圖 4-18、Z 方向之順應性控制模擬的馬達電流結果……….……49 圖 4-19、機器人實驗中方向定義圖……….….……….…….50 圖 4-20、行動輔助機器人的使用情形……….………….…50 圖 4-21、X 方向的順應性控制實驗結果……….………….….51 圖 4-22、X 方向順應性控制實驗的馬達電流……….………….…...51 圖 4-23、Y 方向的順應性控制實驗結果……….………….52 圖 4-24、Y 方向順應性控制實驗的馬達電流……….………52 圖 4-25、Z 方向的順應性控制實驗結果……….………53 圖 4-26、Z 方向順應性控制實驗的馬達電流……….………53 圖 4-27、期望質量 Md的影響實驗………...………54
1
第一章 緒論
1.1 研究動機
隨著醫學和科技的發展,人們平均壽命越來越高,老年人人口比例也相對的越來越 高,社會逐漸成為一個高齡化社會。然而人的年紀漸長,有許多的生理機能會開始退化, 造成老年人記憶力退化、行動不便及許多疾病等問題發生,所以許多老年人需要協助與 照護的。在近幾年來,機器人的技術逐漸成熟,並且從工業用機器人逐漸地擴展到社會 服務、家庭生活等功能;而照護老年人的機器人(Elderly Care Robots)更受到許多機器人 研究團隊重視。老年人照護機器人有許多項應用功能,包含一般生活功能,如尋找及辨 識物品並拿取、環境監控、行程提醒、網路聯繫等;醫療輔助功能,如遠距診療、移動 輔助與導航等;健康安全防護功能,如生理訊號監測、行為監測、緊急通知聯繫等;人 文功能,如情緒的反應、聊天等互動。為了協助及照護老年人,本論文希望設計一台行 動輔助機器人(Walking helper)來幫助老年人在移動時有個攙扶的平台。因為大多數的老 年人在生理機能退化後,行動能力已大不如前,因此我們希望透過機器人的攙扶,老年 人可以自由移動,並可對機器人下達目的地命令,由機器人的帶領,避開環境中的障礙 物,安全移動到目的地。行動輔助機器人有別於一般助行器與拐杖的地方在於它不僅僅 能提供老年人在行走時的攙扶平台,更希望它能夠提供生理訊號監測、導航、緊急通知 聯繫等居家照護的功能。本論文主要研究在於設計一台行動輔助機器人,協助老年人行 動以達成。1.2 相關研究回顧
行動輔助機器人的研究在運動控制上主要可分為兩類,一類為被動型式(Passive type),另一類為主動型式(Active type)。被動式的行動輔助機器人主要是提供支撐及扶 持的協助,在移動上,主要是由人的推力去推動機器人移動並利用煞車器來減速或停 止,其設計主要考量為安全性,優點是構造簡單成本較低,但因為少了馬達的帶動,被 動式行動輔助機器人容易有負載上的問題。主動式的行動輔助機器人是以馬達帶動,因2
此可在系統上增添較多的感測器以增加行動輔助機器人的智慧性功能,然而主動式的行 動輔助機器人對使用者的安全性則比被動式更重要。
日本東北大學,Kosuge 教授團隊曾研製多款行動輔助機器人,其中包含了被動式的 如 RT Walker[1-3]、被動式 Omni RT Walker[9]及主動式的如 Walking Helper [4] 、Omni RT Walker[7-8] 等。圖 1-1 所示即之 RT Walker 為一被動式行動輔助機器人,透過使用者施 於 RT Walker 上的力與轉矩來產生順應之移動與煞車。RT Walker 不僅供應使用者一個 攙扶平台,並擁有預估跌倒、閃避障礙物及階梯、重力補償的能力。RT Walker 利用兩 個雷射距離探測器,前方的雷射距離探測器用來偵測障礙物及階梯,後面的探測器用來 量測使用者與 RT Walker 的距離,目的用來判斷使用者是否將發生跌倒。利用傾斜度感 測器來做重力補償,讓使用者在傾斜的路面上可以輕鬆的推動並不會滑落增加其安全 性。RT Walker 可針對使用者的狀態去做行動控制,將使用者分為三種狀態:行動狀態 (Walking State)、停止狀態(Stop State)、緊急狀態(Emergency State),由所有的感測器去 針對環境及使用者的資訊在主控電腦上作判斷,進而執行適當之功能。
(a) (b) 圖 1-1、日本東北大學 Pf. Kosuge Lab 之 RT Walker[2]
3
Walking Helper[4-6]擁有全方向性的移動平台,具有較高的可操作性,有助於使用者 很直覺的操作,這對老年人與行動不便者來說,是非常有幫助的。Walking Helper 裝了 一個六軸的力感測器(Body force senor),可以透過支撐平台量測到使用者外加於 Walking
Helper上的力與轉矩,而力感測器被覆蓋於移動平台上,所以它也可以量測到與障礙物 發生碰撞的力。一般主動式的行動輔助系統,是利用超音波感測器進行閃避障礙物以及 觸碰感測器來偵測是否發生碰撞,然而當發生超音波感測器無法量測到障礙物,甚至發 生碰撞時,觸碰感測器卻沒有量測到時,這對使用者來說,都是非常危險的,有鑑於此, Walking Helper加裝了力感測器來偵測是否發生碰撞,當發生碰撞時,根據作用力與反 作用力的定律,即可判斷是否發生碰撞。 Omni RT Walker[7-8]的移動平台擁有全方向性的移動,是一種主動式的行動輔助機 器人,其主要設計是利用四個一般輪子且每個輪子上都各有一個附有軸編碼器(Encoder) 的馬達推動,移動平台基本機構如圖 1-2 所示。Omni RT Walker 上有一個力/轉矩感測 器,透過力/轉矩感測器,使用者可以利用施予行動輔助機器人的力來決定其狀態,例如: 機器人的速度與位置。Omni RT Walker 有兩部電腦,其分別處理 Omni RT Walker 的運 動控制演算法和雷射距離探測器的資料,而兩部電腦的通訊是利用 TCP/IP 的方式。被 動式 Omni RT Walker[9]與 RT Walker 同為煞車控制輪子,但不同的是由四個全向輪所組 成。
(a) (b) 圖 1-2、 Omni RT Walker[5]
4
美國麻省理工學院 Dubowsky 等人所發展的行動輔助系統 ─ Personal Aid for Mobility and Monitoring(PAMM ) system[10-11]是一系列輔助機器人。PAMM 不僅提供了 一個輔助平台,還提供導航的功能來幫助記憶力衰退的老年人。PAMM 擁有兩種形式, 可以是拐杖形式 SmartCane 圖 1-3 或是助行器形式 SmartWalker 圖 1-4。在移動形式上 SmartCane不是全向式的移動形式,而 SmartWalker 則是全方向性的。 PAMM 與使用者 的主要操作介面為把手,把手上架設一個六軸力與轉矩感測器,由預先建立的地圖與使 用者的命令進行導航至目的地,並利用超音波感測器來做閃避障礙物功能的感測器。
圖 1-3、 PAMM SmartCane prototype[6-7]
5
圖 1-5 為德國的機器人研究機構 Fraunhofer Institute Manufacturing Engineering and Automation(IPA)的看護機器人 Care-O-bot II。Care-O-bot II 能夠閃避障礙物以及路徑規 劃,這讓使用者可以有效的移動到特定的目的地,此機器人之控制模式分為無目的地指 定及目的地指定兩種模式;無目的地指定又分為速度定值、方向可控及速度、方向都可 控兩種模式;而目的地指定分成三種:速度定值並按照規畫路徑移動、速度可控並按照 規畫路徑移動和速度可控並按照規劃路徑移動但使用者可以修改路徑,使用者利用嵌入 在扶手上的力感測器來控制機器人移動的速度或修改由機器人規劃的路徑[12-14]。
Morris等人提出的 XR4000 mobile robot platform [15]有兩組由 Polaroid 的超音波感 測器組成的超音波模組、兩組紅外線感測器模組、三個觸覺感測器及雷射距離儀;使用 者可以透過 XR4000 上的兩個手把來支撐(圖 1-6),而兩手把上有 force sensor 可用來啟 動/停止機器人 XR4000 的移動。此系統有三種不同的控制模式:(1) 被動模式:在此模 式下其移動是靠使用者自行移動,而機器人此時的主要功能是避免與環境發生碰撞。(2) 主動模式:在此模式下,機器人會將使用者的移動軌跡與預設軌跡去比較,當發現使用 者有偏航時,機器人將會變慢,直到使用者回歸到原來軌跡。(3) 強迫模式(Forced mode):在此模式下,機器人將完全按照預設路徑去移動,使用者無法去控制機器人的
移動。 美國 CMU 研發的看護機器人 Pearl [16]如圖 1-7 所示。Pearl 具有特別事件的提 醒功能與特定環境導航功能。HITACHI 的 Walking Support System 除有效提供使用者一
6 個移動平台外,並且可以幫助使用者坐下與站起[17]。國外尚有一些提供攙扶及導航的 行動輔助機器人[18-20] 。在國內,中興大學蔡清池教授等人曾研製智慧型銀髮族行動 輔助器,具有自我定位、動態最佳路徑規劃、遠端監控、語音下達命令、上網等功能。 為了讓使用者在操控行動輔助機器人,能夠得到行動輔助的功能,在機器人上我們 增加了順應性控制,而順應性控制最重要的資訊為力的資訊,力的資訊一般都使用力感 測器,但力感測器的價格太過昂貴,且裝設不易。Ohnishi 教授提出一個方法利用馬達 電流與轉速資訊去估測出機器手臂上馬達的額外力矩,並經過實際測試鑑別出摩擦力與 阻尼係數,最後透過機器手臂的模型推導出機器手臂的受力大小[21]。文獻[22]也利用 馬達電流與轉速的回授配合機器手臂的動態模型估測出機器手臂的受力大小,並利用適 應性控制去調整動態模型的參數。 圖 1-6、 XR4000[15] 圖 1-7、 CMU Pearl 看護機器人[16]
7
1.3 問題描述
本論文強調如何在使用者操作行動輔助機器人時,能夠得到行動輔助的功能,並且 要能輕鬆的控制行走方向及速度,因此我們將使用者的推力及方向加入控制迴路裡,並 完成行動輔助機器人的順應性控制,使機器人能夠順應著使用者的推力方向行走,並根 據推力大小調整機器人行走速度。然而要如何得知使用者的推力方向及大小則是我們遇 到的問題,在相關文獻中,大多利用力感測器來量測力的大小,但使用力感測器有成本 較高及裝設複雜等問題,因此我們將利用行動輔助機器人上馬達的電流及轉速推算出使 用者的推力方向及大小,以解決我們遇到的問題,並完成行動輔助機器人的順應性控制。1.4 章節說明
本論文主要分為五個章節,第一章主要介紹研究動機與目的。第二章說明了行動輔 助機器人的本體設計與硬體架構。第三章則設計了無力感測器之順應性控制架構。第四 章為模擬與實驗結果,驗證無力感測器的行動輔助機器人順應性控制。最後一章為結論 與未來展望。8
第二章 行動輔助機器人設計
2.1 本體設計
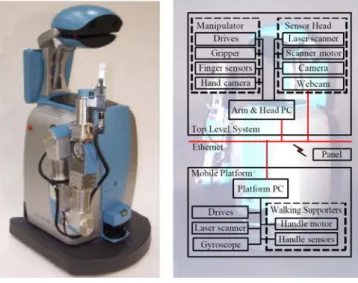
在本體機構上設計而言,因考慮未來可增加居家看護等智慧行為,而決定採用主動 式的行動輔助機器人,並考量人在移動的方式屬於全方向性的移動,故在設計時採用了 由四個全向輪所組成的全向式移動平台當作行動輔助機器人的基礎移動平台,使用全向 輪的移動平台在控制上較為複雜,但由於全向式移動平台擁有與人類一樣的全方向性移 動能力,因此可以給使用者在導引與攙扶行走的功能下帶來更佳的操控性,並能賦予行 動輔助機器人較高的機動性。 圖 2-1 為行動輔助機器人的設計圖,扶手離地面高度約為 89.3 公分,高度約為一般 人腰間至胸部的高度,這高度讓人容易於對扶手施力且使用者也容易攙扶於機器人上, 下半部移動平台面積約為 60*45 平方公分,採月弧狀,四輪擺設為左右對稱並相互間隔 120°,而前後輪則間隔 60°,如圖 2-1(b)所示,月弧狀的擺設在於讓人在行走時,雙腳 有擺動的空間,整體重量約為 45 公斤。 圖 2-1、行動輔助機器人設計圖9
2.2 硬體介紹
圖 2-2 為行動輔助機器人研製完成的雛型圖,層數由下往上數,第一層為主要為馬 達與全向輪,馬達是採用 FAULHABER 所生產的直流馬達,型號為 3863H012C,工作 電壓 12 伏特,額定轉速為每分鐘 6700 轉,減速齒輪比為 14:1,並搭配解析度為 500 lines 的軸編碼器,全向輪是由 KORNYLAK 公司所製作,型號 RW28,輪子直徑為 12 公分, 鋁製輪身,滾輪為硬質橡膠,每輪重約 1.4 公斤可負重 100 公斤,輪子上共有六個小滾 動輪,這六個滾動輪轉動方向與主輪旋轉方向互為正交,因此全向輪擁有具有全向性的 移動能力。第二層主要放置電瓶以及速度控制卡(Motion control board)、馬達伺服驅動器 (Driver)、電流感測板(Current sensor board),這部分在後面小節會再詳細說明。第三層 主要放置直流電壓轉換器(DC-DC converter)和工業電腦(IPC),使用的工業電腦採用威強 公司的主機板(NOVA-6612),並搭載 2GHz 之 CPU,主要負責各感測器的資料處理及行為 運算。最上面一層為手把,供使用者攙扶用,其餘層面供未來擴充用。10
2.2.1 硬體架構
圖 2-3 為行動輔助機器人的硬體架構圖,其中主要可分為三部分,第一部分為工業 電腦所構成的主要控制系統,負責處理感測器回傳值以及各功能運算,包含行動輔助機 器人之運動模型以及下一章節介紹的外力估測器和順應性控制器。第二部分為速度控制 系統,負責驅動各馬達並進行速度控制,且可將軸編碼器的脈波數回傳至工業電腦。第 三部分為電流感測系統,負責將各馬達電流資訊偵測並回傳至工業電腦。以下兩小節將 詳細介紹速度控制系統及電流感測系統這兩系統。2.2.2 速度控制系統
速度控制系統主要由兩個速度控制卡來負責行動輔助機器人上四個馬達的速度控制, 此控制卡為本實驗室所開發,如圖 2-4 所示,利用 TI 的 DSP 為基礎完成的雙軸速度控 制卡,可同時控制兩個馬達。在 DSP 速度控制卡的最底層為 PID 伺服控制器,功能是 為了使馬達能夠正確且穩定達成電腦端所下達的速度命令,而速度控制卡透過馬達上的 軸編碼器回授馬達的轉動速度資訊,並利用串列埠與電腦作溝通,以每 51ms 回傳軸編 碼器的脈波數至電腦端,使電腦可透過脈波數計算出馬達轉速,而電腦端亦可透過 圖 2-3、行動輔助機器人硬體架構圖11 RS-232對馬達下達速度命令。圖2-5為論文中使用的馬達伺服驅動器,使用的是Pololu 30A 高功率DC馬達驅動器,其優點體積小且在20伏特的電壓輸入下可耐連續電流達30 安培,由於驅動器所需求的輸入訊號是馬達的正反轉的方向訊號以及單一個控制速度的 PWM訊號,而控制卡輸出訊號為控制正、負轉的雙PWM訊號及基準地線,因此在訊號 差異,無法直接與速度控制卡連接,必須接上一訊號轉換電路,圖2-6為訊號轉換電路 的方塊圖,驅動器所需要的輸入(INA、INB)來控制馬達的轉向,當INA為高電位、INB為低
電位時,馬達正轉,當INA為低電位、INB為高電位時,馬達逆轉,當INA、INB同時為高
電位或低電位時,馬達為煞車至高電位或低電位,因此利用控制卡上的I/O埠(D0、D1) 產生驅動器所需要的方向訊號,當DSP將資料送到I/O埠時,IS會產生一個脈波使D型閂 鎖(D latch)可以鎖定方向訊號,再利用二選一的資料選擇器將控制卡輸出的正、負轉的 雙PWM訊號(PWMF、PWMB)選擇出該需要的訊號,而選擇器的選擇腳位則利用D latch 的輸出(DA)回授訊號來選擇,在訊號接至驅動器時,則接上光耦合器(Phototransistor Coupler)以隔離控制信號與驅動信號。 圖 2-4、速度控制卡 圖 2-5、伺服驅動器
12 圖 2-6、訊號轉換電路方塊圖
2.2.3 電流感測系統
為了讓行動輔助機器人能夠讓使用者攙扶行走,我們必須讓機器人知道使用者的意 向,亦即使用者的推力大小及方向,這樣行動輔助機器人才能根據使用者的意向行走。 在文獻上許多用的方法是利用力感測器去得知使用者意向,但力感測器價格昂貴且裝設 較為複雜,因此我們利用行動輔助機器人上四個馬達的電流與轉速去計算出使用者的推 力大小及方向進而可以得知使用者的意向。電流感測系統量測行動輔助機器人上四個馬 達的操作電流值,並回傳至工業電腦做運算。電流量測系統主要由兩個電流感測板所組 成,每個電流感測板可以量測兩個馬達電流,圖 2-7 為電流感測板電路方塊圖。利用霍 爾感測元件(LTS 25-NP)將電流轉換為類比電壓訊號,由於此霍爾感測元件在一般情況下 的電壓輸出為 1.9 伏特至 3.1 伏特,但類比-數位轉換晶片(ADC0804)是將 0 伏特至 5 伏 特的類比電壓轉換為 8 bit 的數位訊號,因此我們利用運算放大器(OPA LM358)將此電壓 區間作線性放大以符合 ADC0804 所需的 0 伏特至 5 伏特,最後利用微控器(AT89C51) 控制 ADC 將類比訊號轉換為數位訊號後,使用 RS-232 傳回工業電腦。圖 2-8 為電流感 測板,主要元件為霍爾原件 LTS 25-NP、OPA LM358、ADC0804 以及為控器 AT89C51 所組成。圖 2-9 為電流感測板之校正結果,利用電源供應器提供-9 安培至 9 安培的定電 流,分別透過 4 個感測器所感測的數值回傳至電腦,作線性迴歸曲線校正,而各校正曲 線分別為13 ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ = = = = 9.5082 -0.0731 : 4 9.3143 -0.0726 : 3 9.3607 -0.0737 : 2 9.6137 -0.07359 : 1 x y Sensor x y Sensor x y Sensor x y Sensor (2-1) 其中 x 為從感測板讀到的數位值,範圍 0 到 255;y 為校正過後的電流值,範圍-9 安培 到 9 安培。 圖 2-7、電流感測板電路方塊圖 圖 2-8、電流感測板
14 圖 2-9、電流感測板校正結果
2.3 行動輔助機器人之運動控制
圖 2-10 為行動輔助機器人的運動控制系統架構圖,由工業電腦處理行動輔助機器人 的運動速度及里程計(Odometer)。在運算出行動輔助機器人的運動速度後,利用行動輔 助機器人的運動模型(Kinematic Model)轉換為各輪子的運轉速度,並透過串列埠對速度 控制卡下達速度命令,速度控制卡透過驅動器將控制訊號轉換為驅動訊號來推動馬達使 輪子運轉,而馬達上的軸編碼器在馬達運轉時會產生脈波傳回速度控制卡,透過累積的 脈波數可以換算出馬達轉速,使速度控制卡可對馬達作速度控制,亦可將累積的脈波數 透過 RS-232 回傳至工業電腦,而工業電腦中所設計的里程計則可記錄行動輔助機器人 所行走的距離與位置。下面兩小節將分別說明運動模型的推導及里程計的設計。15 圖 2-10、運動控制架構圖
2.3.1 運動模型推導
圖 2-11 為行動輔助機器人運動示意圖,Σ 為世界座標平面,O ΣR為機器人座標平面, 我們將機器人座標平面的原點定義為機器人的中心點,亦即為兩輪軸的交點,而ΣR的 YR軸與Σ 的 XO O軸夾角即為機器人的朝向角 θ,d1和 d2為機器人中心點至輪子中心點的 距離,Vi、i=1,2,3,4 為各輪子轉動的速度,由圖 2-11 可以知道 α 為 XR軸與兩輪軸的最 小夾角,且為固定常數 α =π/6。我們利用圖 2-11 推導機器人的運動模型。我們先定義 旋轉矩陣 R(δ),R(δ)可將向量旋轉 δ 角度,當 δ 角度為正值時,則將向量依逆時針旋轉: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − =δ
δ
δ
δ
δ
cos sin sin cos ) ( R (2-2)16 圖 2-11 中的 P0為行動輔助機器人的移動平台中心點位置向量,表示為P =0
[
xG yG]
T , 而當機器人朝向角為零時,中心點至各輪子中心點的位移向量 Pi,如圖 2-12 所示,則 可表示為下列方程式 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 0 1 ) ( i i i i i y R L x Pδ
、i=1,2,3,4 (2-3) 圖 2-11、行動輔助機器人運動示意圖 圖 2-12、當機器人朝向角為 0 時 Pi與 Di定義圖17 在(2-3)式中 Li為機器人中心點到各輪子的距離,各值表示為 L1 = L2 = d1、L3 = L4 = d2, 而(2-3)式中 δi為各輪子位移向量 Pi的角度,從圖 2-12 與(2-3)是求得 Pi分別為 ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎪ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡− = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ + = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ − = α α π α α α π α α α α π α α π α cos sin 0 1 ) 2 ( cos sin 0 1 ) 2 ( cos sin 0 1 ) 2 ( cos sin 0 1 ) 2 ( 2 4 4 2 3 3 1 2 2 1 1 1 d L R P d L R P d L R P d L R P 所以各輪子在世界座標的位置向量則為機器人中心點位置向量加上隨機器人朝向角旋 轉的各輪子位移向量,如(2-4)式所示。 i i P R P r = 0 + (θ) 、i=1,2,3,4 (2-4) 其中的 θ 為機器人的朝向角。將各輪子的位置向量對時間微分後我們可以得到各輪子中 心點的速度: i i i r P R P dt d v = ( ) = & +0 &(θ) 、i=1,2,3,4 (2-5) 在得到各輪子中心點的速度後,我們再將其速度轉換成各輪子轉動的速度,因此定義單 位向量 Di,Di為機器人朝向角為零時,各輪子轉動方向的單位向量,如圖 2-12 所示。 i i i L R P D ) 2 ( 1 π = 、i=1,2,3,4 (2-6) 由圖 2-12 與(2-6)式,我們可以知道其 Di各值表示為: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =
α
α
sin cos 1 D , ⎥ ⎦ ⎤ ⎢ ⎣ ⎡− =α
α
sin cos 2 D , ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − =α
α
sin cos 3 D , ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − =α
α
sin cos 4 D 所以,將方式(2-5)與方程式(2-6)中的 Di 經隨機器人朝向角旋轉後,互作內積可得到各 輪子的轉速,如方程式(2-7)所示。 i T T i i T i T i iv
R
D
P
R
D
P
R
R
D
V
=
(
(
θ
)
)
=
&
0(
θ
)
+
&
(
θ
)
(
θ
)
、i=1,2,3,4 (2-7)18 因此各輪子轉速分別為: ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ + − + − = + + − + − = + − − − − = + + + + = ) sin( ) cos( ) sin( ) cos( ) sin( ) cos( ) sin( ) cos( 2 4 2 3 1 2 1 1 θ α θ α θ θ α θ α θ θ α θ α θ θ α θ α θ & & & & & & & & & & & & d y x V d y x V d y x V d y x V G G G G G G G G (2-8) 將其寫成矩陣形式,表示成機器人中心點的速度與各輪子的關係: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ θ θ ω ω ω ω & & & G G V W W W W y x T R R R R V V V V ) ( 4 3 2 1 4 3 2 1 (2-9) 其中 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − + − + − − − − − + + = 2 2 1 1 ) sin( ) cos( ) sin( ) cos( ) sin( ) cos( ) sin( ) cos( ) ( d d d d TV α θ α θ α θ α θ α θ α θ α θ α θ θ 。 而
ω
i ,i=1,2,3,4為輪子的轉動角速度,RW 為輪子半徑,θ 為機器人的朝向角。TV(θ) 則為將機器人中心點在世界座標平面的速度向量轉換為四輪轉速向量的轉換矩陣。 由圖 2-11 可以求得世界座標 (ΣO)與機器人座標(ΣR)的轉換關係,若機器人朝向角 為 θ,其轉換關係如下列方程式所示: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ θ θ θ θ θ θ & & & & & & G G R R y x y x 1 0 0 0 ) sin( ) cos( 0 ) cos( ) sin( (2-10) 將方程式(2-10)代入方程式(2-9)得到方程式(2-11): ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ θ ω ω ω ω & & & R R V W W W W y x M R R R R V V V V 4 3 2 1 4 3 2 1 (2-11)19 其中, ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = 2 2 1 1 cos sin cos sin cos sin cos sin d d d d MV α α α α α α α α 。 我們定義 MV為機器人的逆向運動模型,MV為機器人座標平面(ΣR)上的速度向量轉換成 四輪轉速向量的轉換矩陣,由於我們在操控行動輔助機器人的時,人的推力是直接施加 於機器人坐標平面上,且 MV上各元素中並無其他變數,故為一個常數矩陣,因此機器 人主要在機器人座標平面上運算較為直接且簡單。
2.3.2 里程計設計
里程計是由馬達上軸編碼計所回傳的脈波數去計算出行動輔助機器人此刻的移動 速度,進而推算移動距離及位置,因此,當我們透過四輪的脈波數換算出四輪的轉速後, 其機器人移動速度為: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − 4 3 2 1 4 3 2 1 1 ) ( V V V V M R R R R M M M y x V W W W W T V V T V R R ω ω ω ω θ& & & (2-12) 其中我們定義 + V M 為順向運動模型, + V M 是將四輪速度轉換至機器人座標平面上的中心 點速度的轉換矩陣。根據方程式(2-12)可以推算出在世界座標下的速度,因此機器人移 動的距離為 ) ) 1 ( ) 1 ( ) 1 ( ) ( ) ( ) ( ( 2 ) ( ) ( ) ( ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ k k y k x k k y k x T k k y k x G G G G S G G θ θ θ & & & & & & (2-13) 其中,(k)表示此刻資料,( −k 1)表示上一筆資料,T 為取樣時間。最後我們則可以得S 到行動輔助機器人之位置: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ) ( ) ( ) ( ) 1 ( ) 1 ( ) 1 ( ) ( ) ( ) ( k k y k x k k y k x k k y k x G G G G G G θ θ θ (2-14)20
2.3.3 位置控制
有了機器人的運動模型以及里程計後,即可進行位置運動控制,圖 2-13 為位置控 制的方塊圖,其中我們採用一個 P 控制器來做控制,假設目標點位置為 T d d d y x , , ] [ θ , 而位置誤差為目標點位置減去機器人目前位置,如下列方程式所示 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ G G G d d d e e e y x y x y x θ θ θ (2-15) 其 P 控制器設計為 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ e e e p py px e e e P cmd cmd cmd y x K K K y x K y x θ θ θ 0 0 θ 0 0 0 0 & & & ,其中Kpx ,Kpy,Kpθ>0 (2-16) 當得到機器人中心點的速度命令後,透過前一章節的運動模型可以計算出四輪的速度命 令,並交由速度控制系統去控制馬達速度,如方程式(2-17),其中 θ 為機器人的朝向角。 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ cmd cmd cmd V cmd cmd cmd cmd y x M V V V V θ θ θ θ θ & & & 1 0 0 0 ) sin( ) cos( 0 ) cos( ) sin( , 4 , 3 , 2 , 1 (2-17) 當時間 t→∞時,位置誤差則會趨近於零,機器人的速度命令亦趨近於零,因此機器人停 止,即表示機器人到達目標點[23]。 圖 2-13、位置控制方塊圖21
2.3.4 位置控制實驗
圖 2-14、圖 2-15 為運動控制時,根據里程計所記錄的軌跡圖,其中分別針對開迴 路控制與閉迴路位置控制的兩個實驗結果,開迴路控制是依照運動模型給予速度命行走, 而閉迴路位置控制如上一節提到的控制方法,在開迴路控制實驗裡,我們給予機器人每 秒 0.1 公尺的向前行走命令,初始朝向角為π/2。由圖 2-14 可以發現機器人會朝向正 X 軸的方向偏移,從圖 2-15 朝向角的記錄軌跡可以發現朝向角也將會越來越偏離π/2, 並非維持一開始的角度。在閉迴路位置控制裡,我們讓機器人朝向角為π/2並向前移動 2 公尺後,再向後移動 2 公尺回到初始位置,從圖 2-14 以及圖 2-15 的記錄軌跡中,機 器人在啟動瞬間有發生些微偏移,但隨即會修正回來。在實際情況下,機器人在移動過 程中,會發生輪子與地面打滑的現象,此現象並無法從軸編碼器得知,因此里程計也無 法得知是否發生打滑,所以在實際情況,機器人移動的軌跡與記錄的軌跡會有所差異。 圖 2-14、運動坐標軌跡圖22 圖 2-15、運動朝向角軌跡圖
2.4 行動輔助機器人系統架構
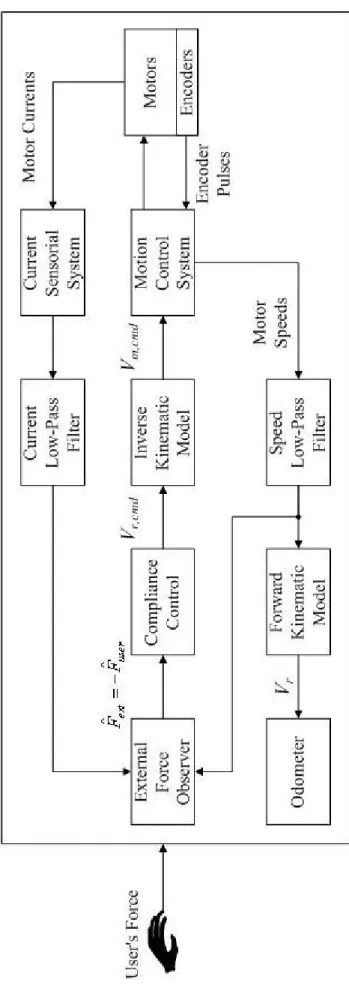
圖 2-16 為行動輔助機器人系統架構圖,電流感測系統會將四輪的馬達電流I 感測並a 回傳至工業電腦。馬達為 PWM 驅動,因此電流值跳動過大,故經由一低通濾波器,將 電流訊號的高頻部分濾除後,交由施力估測器去運算,而速度控制系統則將四輪上的軸 編碼器所回傳的脈波數回傳至工業電腦換算成馬達轉速後透過一低通濾波器,濾除高頻 雜訊,並同時給予施力估測器和里程計。里程計則根據行動輔助機器人的順向運動模型 所計算出行動輔助機器人的移動速度 Vr,並加以換算成機器人移動距離以及現在位置並 記錄,而施力估測器則根據得到的馬達電流與轉速對行動輔助機器人所受到使用者的施 力進行估測,當估測出使用者施力後,透過順應控制器計算出其相對應的移動速度 Vr,cmd, 再透過機器人的逆向運動模型得到四輪的速度命令 Vm,cmd並對速度控制系統下達,當速 度控制系統得到四輪速度命令後,則會控制四輪馬達維持至此命令之速度,完成行動輔 助機器人的順應性移動行為。當使用者對行動輔助機器人施以外力時,行動輔助機器人 上馬達的轉速與電流則會發生變化,而行動輔助機器人則會透過施力估測器估測出外力 的變化並順應使用者推力方向移動。23
24
第三章 施力估測器與順應性控制
為了讓使用者在操作行動輔助機器人時,能夠輕鬆且安全的控制機器人的行走速度 及方向,因此我們設計一順應性控制於行動輔助機器人上,將機器人仿效成一被動式行 動輔助機器人,以提高行動輔助讓機器人的安全性,並且機器人能夠順應使用者的施力 方向而移動。在順應性控制中,力的資訊是非常重要的,而力的資訊取得最直接的方式 是利用力感測器,但其力感測器的價格昂貴,且必須配合機器人結構,故安裝上也較複 雜。本文採用直流馬達的電流與轉速去推算行動輔助機器人的外在施力,在外加施力估 測器估測出施力的估測資訊後,即可將此資訊應用於順應性控制上,在本章節將介紹外 加施力估測器以及順應性控制器的設計。3.1 無力覺感測器之外加施力估測器設計
在這一節中,我們首先參考 Ohnishi 教授所提的論文[21],作出單軸馬達的施力估 測器,接著設計整體機器人的施力估測器,從單軸推廣至整體機器人上,最後模擬驗證。3.1.1 單軸馬達之施力估測器
在不使用力感測器的情況下,要得知施力大小,則必須先知道力的產生與輸出。圖 3-1 為單軸馬達的力矩示意圖,在單軸馬達上,馬達產生的力主要是電磁轉矩(Tm),在 扣除外加施力(Text)以及摩擦力(T )後,才成為輸出轉矩傳送到馬達軸承推動負載,而馬f 達的電磁轉矩與電流(ia)成正比關係,因此我們可以從馬達的電流去推算出馬達所產生 的轉矩,從馬達的轉速及負載推算輸出轉矩,在得知摩擦力後,三者相減就可以得知馬 達所受的外加施力。 圖 3-1、單軸馬達力矩示意圖25 馬達的所產生的電磁轉矩與馬達的電流關係如下列方程式 a b m K i T = ⋅ (3-1) 其中Kb為馬達的轉矩常數。馬達本身可視為具有慣性矩 Jm和阻尼係數 Bm的模型,因此 f ext l m m m B T T T T J ω&+ ω= − − − (3-2) 其
ω
為馬達轉速,Tf為摩擦轉矩, Text為額外施加的轉矩,Tl 為負載轉矩,而負載轉 矩我們可視為ω
ω
l l lJ
B
T
=
&
+
(3-3) 負載轉矩包含負載的慣性矩 Jl和阻尼係數 Bl為,因此根據方程式(3-1)、(3-2)、(3-3)可改 寫成 f l m l m a b ext ext f l l a b m m T B B J J i K T T T B J i K B J − + − + − ⋅ = → + + + − ⋅ = + ω ω ω ω ω ω ) ( ) ( ) ( & & & (3-4) 由方程式(3-4)中,我們若知道負載的慣性矩、阻尼係數及摩擦轉矩後,我們即可推算額 外施加轉矩,但式(3-4)中除了用到電流及轉速外,還用到了角加速度ω
&,角加速度的資 訊並不易直接量測出,因此我們將將方程式(3-4)中的結果加上一個一階低通濾波器,由 於並輸出已非原來的額外施加轉矩(Text),因此以Tˆext表示濾波器的輸出估測值,如下列 方程式 ω ω ω ω ω G J J T B B G J J i K G s G T B B s J J i K G s G T l m f l m l m a b f l m l m a b ext ) ( ) ) ( ) ( ( ) ) ( ) ( ( ˆ + − − + − + + ⋅ + = − + − + − ⋅ + = (3-5) 由(3-5)可以發現,只需馬達電流及轉速的資訊即可估測出馬達的額外施加轉矩,而 G 為 一階濾波器的參數亦為此估測器的參數,G 的大小關係到系統的頻寬,G 越大估測出的 值越接近實際情形。圖 3-2 為方程式(3-5)的方塊圖實現。26 圖 3-2、單軸馬達之外加施力估測器方塊圖
3.1.2 行動輔助機器人之整體施力估測器
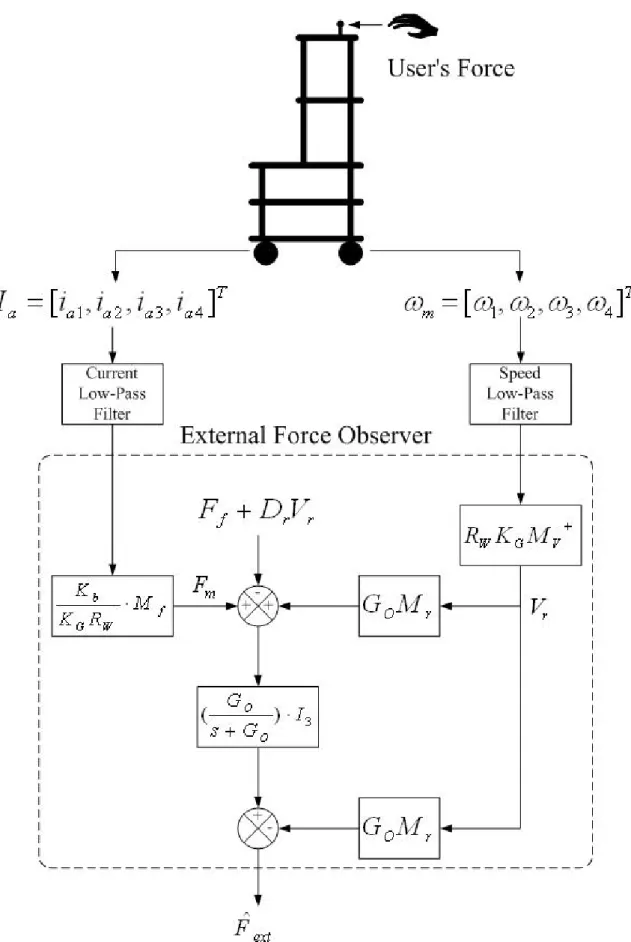
由於行動輔助機器人的移動平台是由四個馬達所組成,因此在從單軸馬達推廣至整 體行動輔助機器人時,我們必須先推導四輪的合力,圖 3-4 為行動輔助機器人之力幾何 圖,每個輪子的正向切力為 fi, i= ,12,3,4與每個馬達輸出的轉矩 Ti關係如下式 W G i i KTR f = (3-6) 其中 KG為減速機之齒輪比,RW為輪半徑。每個輪子的正向切力透過幾何關係將可其轉 換至行動輔助機器人之中心參考點 O 的合力 T Z Y X O F F N F =[ , , ] ,由圖 3-3 可得知 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⋅ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⋅ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⋅ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⋅ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 4 2 4 , 4 , 3 2 3 , 3 , 2 1 2 , 2 , 1 1 1 , 1 , f d f f f d f f f d f f f d f f N F F R R R R R R R R Y X Y X Y X Y X Z Y X (3-7)27 圖 3-3、行動輔助機器人之力幾何圖 其中的 fXR,i、 fYR,i,i= ,12,3,4為每個輪子的正向切力投影到機器人座標軸上的分力,其 各值為 ⎩ ⎨ ⎧ ⋅ = ⋅ = ⎩ ⎨ ⎧ ⋅ − = ⋅ = ⎩ ⎨ ⎧ ⋅ − = ⋅ − = ⎩ ⎨ ⎧ ⋅ = ⋅ − = 4 4 , 4 4 , 3 3 , 3 3 , 2 2 , 2 2 , 1 1 , 1 1 , cos sin cos sin cos sin cos sin f f f f f f f f f f f f f f f f R R R R R R R R Y X Y X Y X Y X α α α α α α α α 、 、 (3-8) 將式(3-8)代入式(3-7)後得到中心點合力與各輪的正向切力關係 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ 4 3 2 1 4 3 2 1 2 2 1 1 cos cos cos cos sin sin sin sin f f f f M f f f f d d d d N F F f Z Y X α α α α α α α α (3-9) 我們定義 Mf為將各輪的正向切力轉換至中心點的力轉換矩陣。 在得到四輪子與中心點的力關係後,我們將上一節所提的力估測方法應用於行動輔助機 器人上,由於行動輔助機器人在行走時,四輪均會轉動,故無法簡單的計算出在行走時 受其餘三輪的外力影響,因而無法從各輪子去估測所受之外加施力,在推算中心點的力, 必須直接討論機器人中心點的受力關係。我們假設各馬達所產生的電磁轉矩並換算至機 器人中心點的受力 T mz my mx m F F N F =[ , , ] 為
28 T a G W b a G W b a G W b a G W b f m M RKK i RKK i RKK i RKK i F ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ ⋅ ⋅ ⋅ = 1 2 3 4 (3-10) 其 中 Kb 為轉矩常數、RW 為 輪 半 徑 、KG 為減速齒輪比。而機器人移動速度為 T rz ry rx r V V V =[ , ,θ& ] 則透過順向運動模型根據四輪轉速推算出來 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + 4 3 2 1 ) ( ω ω ω ω W G V r M K R V (3-11) 而 T fz fy fx f F F N F =[ , , ] 為地面摩擦力,Mr =diag(Mrx,Mry,Irz)、Dr =diag(Drx,Dry,Drz)為 機器人的質量與阻尼係數,因此機器人的動態方程式為 ext f r r r r m M V DV F F F − & = + + (3-12) 因此額外的施力 T extz exty extx ext F F N F =[ , , ] 為 f r r r r m ext F M V DV F F = − & − − (3-13) 但在(3-13)式中有用到加速度的資訊,因此我們將其結果透過一個一階低通濾波器後, 而濾波器的輸出即為外加施力的估測值,以Fˆext表示,故我們得到下列方程式 r r O f r r r r O m O O ext F G M V DV F G M V G s G F + − − − + = ( ) ˆ (3-14) 圖 3-4 為施力估測器的方塊圖,透過四個馬達的電流與轉速後,先透過低通濾波器將高 頻雜訊濾除,使電流及轉速資訊較平穩,再交由估測器去估算出施力值Fˆext。
29
30
3.1.3 參數鑑定
在外力估測器的設計中,我們知道行動輔助機器人的參數後,即可透過估測器估測 出外力,在上一節中,我們的估測器需要知道機器人的參數有質量M 、阻尼係數r D 以r 及摩擦力Ff。質量我們可以量測出,機器人的質量為Mr =diag(44.6 ,44.6 ,1.379),但阻 尼係數與摩擦力就不易取得,因此我們透過下列方式去鑑別出阻尼係數與摩擦力。在上 節我們所提到的機器人動態方程式(3-12)中,可以知道行動輔助機器人所受外力的影響 有,外加施力F 、摩擦力ext Ff以及反作用力MrV&r +DrVr,因此我們定義擾動外力為F ,dis包含了外加施力F 、摩擦力ext Ff 以及阻尼項DrVr,如(3-15)所示 r r f ext dis F F DV F = + + (3-15) 由(3-12)擾動外力可依下列方程式出 r r m dis F M V F = − & (3-16) 其中方程式(3-16)中有加速度項,故將其結果加上一階低通濾波器得到(3-17),由於經過 低通濾波器後以不是原來的擾動外力F ,因此我們以dis F&dis表示為濾波器的輸出,即為 我們估測出的值 r r O r r O m O O dis s G F G M V G M V G F + & − & + = ( ) ˆ (3-17) 在得到(3-17)式後,我們對行動輔助機器人做移動測試,讓行動輔助機器人行走於 X 軸、 Y 軸以及旋轉於 Z 軸下,透過電流及轉速的回授,並利用(3-17)式去估測其外力,由於 在移動測試下並無外力輸入,故擾動外力中的外加施力F 為零,因此估測出的結果應ext 如同(3-18)所示 r r f dis F DV Fˆ = + (3-18) 透過方程式(3-17)和(3-18)在移動測試後,我們就可以求出阻尼係數D 以及摩擦力r Ff , 在測試後,阻尼係數Dr =diag(50.221,36.173, 3.801),單位為 Nt⋅s/m 與(Nt⋅m)⋅s/rad,而
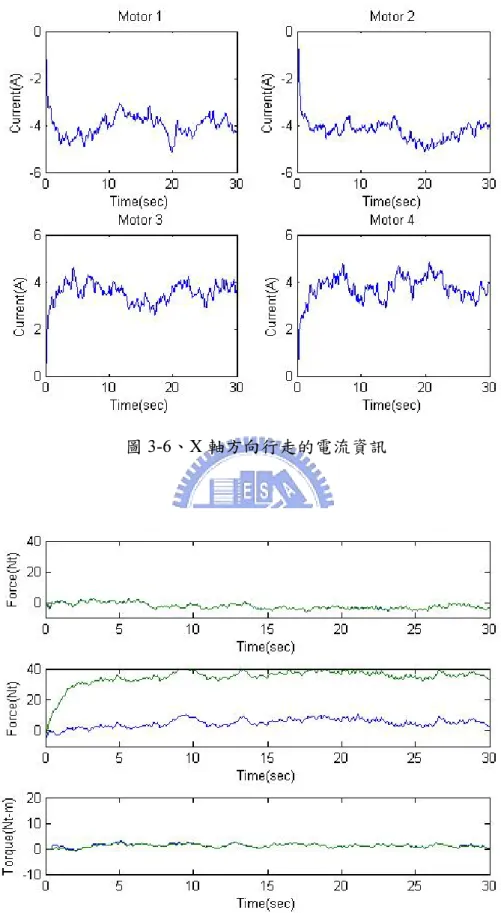
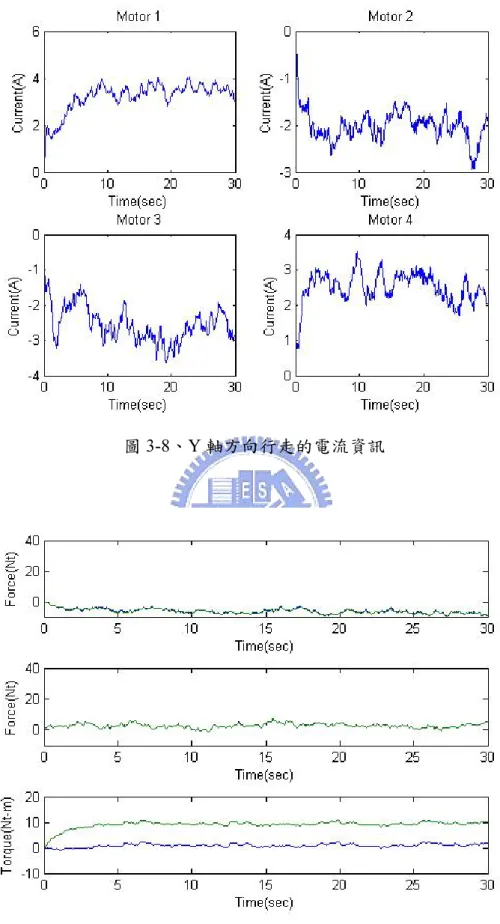
31 摩擦力 =[20.001,22.77,6.927]T f F ,其單位為 Nt,將兩參數值帶回估測器中即完成行動 輔助機器人之整體施力估測器。圖 3-5 到圖 3-10 為三軸的移動測試結果,圖 3-5、圖 3-7、 圖 3-9 為三方向移動的力估測結果,圖中爬升的曲線為(3-17)式所估測的結果,由於式 中並無考慮地面摩擦力以及阻尼係數的影響,因此在移動測試的過程中受到地面摩擦力 與阻尼係數的影響,估測出的值並非為零,而另一條曲線為(3-14)式所估測的結果,由 於考慮了地面摩擦力以及阻尼係數的影響,我們可以發現在無外力輸入下估測出的值都 將趨近於零,這結果符合我們所預期。圖 3-6、圖 3-8、圖 3-10 分別為三方向移動時, 馬達所產生的電流值,圖 3-6 中顯示當機器人朝向正 X 軸方向行走時的四個馬達電流, 由於朝向正 X 軸行走,因此馬達 1 與馬達 2 為反轉,故量測到的電流值為負值,表式馬 達產生一個反轉的力,而馬達 3 和馬達 4 為正轉,故量測到的電流值為正值,表式馬達 產生一個正轉的力,由四輪和力則使機器人向正 X 軸方向前進,同理,圖 3-8、圖 3-10 可以得知機器人朝向正 Y 軸行走與隨著 Z 軸逆時針旋轉。由於單純測試過程中是給予 某方向行走的命令,並無額外控制行走狀況,故在行走時四輪施力的情形不同,故會造 成機器人行走偏移的情形。 圖 3-5、X 軸方向行走的力估測結果
32
圖 3-6、X 軸方向行走的電流資訊
33
圖 3-8、Y 軸方向行走的電流資訊
34 圖 3-10、Z 軸方向旋轉的電流資訊
3.2 行動輔助機器人順應性控制架構
在本節裡,我們欲將機器人設計為仿被動式的行動輔助機器人,由於行動輔助機器 人是跟人有直接互動的關係,因此使用者的安全性非常重要,故我們將機器人仿效成一 剛體,當使用者無施加外力於機器人時,機器人將靜止不動,反之,當使用者施加外力 於機器人時,機器人能夠順應著使用者的力而移動。根據上一節中提到的施力估測器, 我們可以估測出使用者對行動輔助機器人施予的推力,在估測初推力後,透過本節所設 計的順應性控制架構,讓機器人順應著使用者推力方向移動,最後也探討著順應性控制 器的參數變化對行動輔助機器人的影響。3.2.1 順應性控制架構
圖 3-11 為我們採用的順應性模型圖,我們期望行動輔助機器人為一個由質量與阻 尼係數所構成的模型,當使用者對行動輔助機器人施予一方向的推力時,機器人則會順 應此方向運動並依據推力的大小去調整運動速度。圖 3-11 的模型我們可以用動態方程 式表示,如式(3-19)35 user r d r dV DV F M & + = (3-19) 因此順應性控制架構如圖 3-12 所示,施力估測器根據電流及轉速變化去估測機器人所 受之外力,其估測出的施力恰好與使用者推力方向相反,因此在圖中兩者相差一負號, 在估測出使用者推力後經透過順應性模型去計算機器人應行走的速度,並透過逆向運動 模型推算出四輪的速度命令,且下達於速度控制系統對馬達進行速度控制,以完成機器 人的順應性移動。其中 Md、Dd為我們所期望的質量與阻尼係數,根據調整這兩個值可 以改變行動輔助機器人的性能以適應使用者,而 Md、Dd對行動輔助機器人的性能影響 情形將於下一小節討論。 圖 3-11、順應性模型圖 圖 3-12、順應性控制架構
36
3.2.2 參數設定之影響
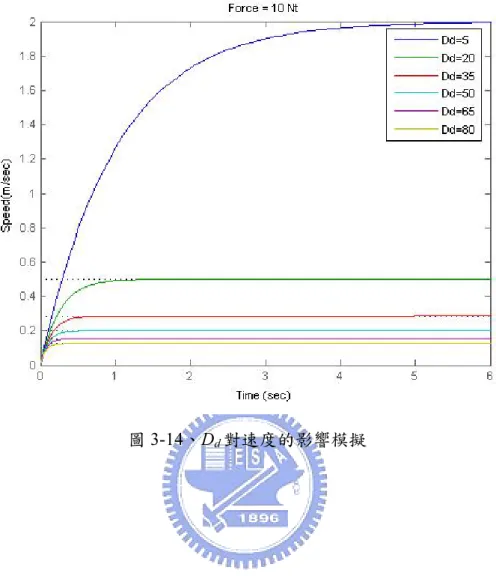
在上一小節中提到順應性控制架構中有兩個參數,而這兩個參數將會影響行動輔助 機器人之性能,因此在此小節將探討 Md、Dd的影響。Md為我們所期望的質量,當 Md 越大時,其意思就如同我們期望機器人的重量越重,因此 Md越大,機器人的速度反應 將越慢,反之 Md越小反應速度越快。Dd為我們所期望的阻尼係數,Dd越大表示阻力越 大,將造成在同樣的力輸入下,Dd越大則速度越慢,反之則越快。根據方程式(3-19)我 們利用電腦模擬 Md、Dd的影響,圖 3-13 為當 Dd不變,在固定的力輸入下,Md變化對 速度的影響,我們可以發現 Md的變化影響了速度的暫態,Md越大速度上升越慢。圖 3-14 為當 Md不變,在固定的力輸入下,Dd對速度的影響,我們可以發現 Dd的變化影響了速 度達穩態的時間以及穩態的終值大小,Dd越大則達穩態的時間越久,穩態的速度也越慢, 反之,則時間越短且終值速度也越快。因此我們可透過參數的調整去適應使用者的需 求。 圖 3-13、Md對速度的影響模擬37
38
第四章 模擬與實驗結果
4.1 單軸馬達模擬與實驗結果
4.1.1 單軸馬達外加施力估測模擬
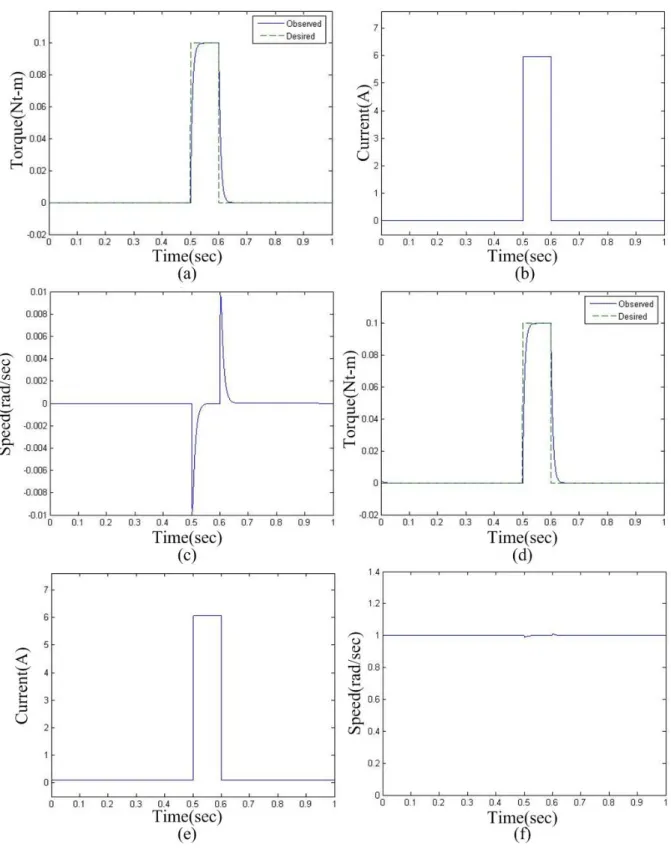
我們對圖 4-1 中的單軸馬達外加施力估測器進行模擬測試,模擬結果如圖 4-2 所示, 分別針對馬達在靜止中與運轉中的外加施力進行估測模擬。圖 4-2 (a)是馬達在靜止中的 施力估測模擬結果,圖中的一條曲線(Desired)為我們模擬施加於馬達一個 0.1 Nt-m 脈波 轉矩,另一條曲線(Observed)為估測出的結果,圖 4-2 (b)與圖 4-2 (c)為模擬中馬達電流 與轉速的變化圖。圖 4-2(d)為模擬馬達在 1 rad/sec 的運轉速度下,輸入 0.1 Nt-m 的額外 脈波轉矩與估測出的結果曲線,圖 4-2 (e)與圖 4-2 (f)為模擬中馬達電流與轉速變化。在 兩個模擬中我們可以發現無論馬達是否有在運轉,其估測結果均達到我們所希望的目 的,因此下一節將實現於單軸馬達的順應性控制。 圖 4-1、單軸馬達外力估測與順應性控制架構圖39
40
4.1.2 單軸馬達施力估測與順應控制實驗
此實驗目的在於驗證在單軸馬達上的外加施力估測以及順應性運轉,實驗架構如圖 4-1所示,在估測器得到馬達的電流與轉速後,會輸出一估測的施力值,根據這個施力, 我們透過一個轉動慣量與阻尼所組成的順應性控制器計算出轉速命令並下達於速度控 制卡上,使馬達運轉,以達成順應性運轉,由於單軸馬達實驗,馬達趨近於無負載運轉, 故估測器各參數均為馬達的參數。圖 4-3 為實驗的馬達電流與外在力矩估測,在圖 4-3 中”0”區表示剛啟動狀態,”1” 區表示無施加外力於馬達上,”2”區表示施加一個使馬達 正轉的外力,”3”區表示施加一個使馬達逆轉的外力。圖 4-4 為馬達的轉速,結果發現, 當我們施加外力於馬達上時,施力估測器可以估測出力的反應,並且透過順應性控制器 計算轉速命令使馬達運轉,而施力越大,轉速則越快,這結果符合之前所模擬。 圖 4-3、單軸馬達順應性控制的施力與電流的實驗結果41 圖 4-4、單軸馬達順應性控制實驗時的轉速
4.2 行動輔助機器人外加施力估測器模擬
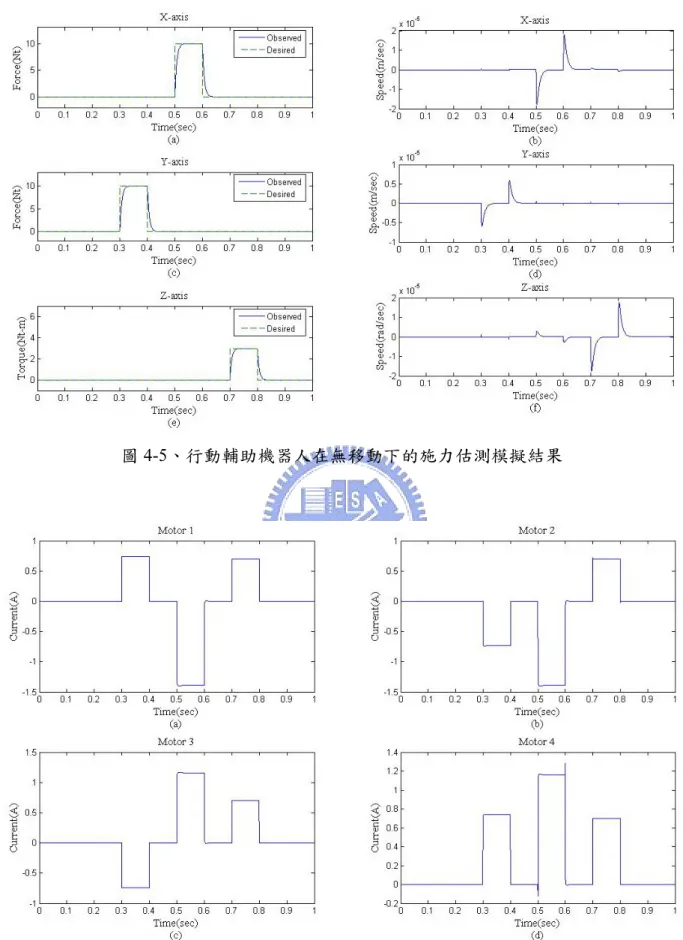
根據圖 3-4 的估測器方塊圖我們針對機器人在靜止、X 方向移動、Y 方向移動、Z 軸旋轉等情況下,給予一施力,模擬此施力估測器是否可以如期估測出施力值,其模擬 結果如圖 4-5 至 4-12。圖 4-5、4-7、4-9、4-11 中的(a)(c)(e)為三方向的估測結果與給予 的力理想值,圖中的(b)(d)(f)為行動輔助機器人三方向的移動速度,而圖 4-6、4-8、4-10、 4-12為相對應的馬達電流圖。從模擬圖中可以發現當機器人在靜止時,其估測結果相當 符合我們所預期,而當機器人在移動時,馬達啟動瞬間產生大的電流值,使得估測結果 在瞬間有很大的反應,因此在實際應用時在可在電流回授後加上低通濾波器即可降低此 情形。從模擬結果來看其施力估測器無論行動輔助機器人是靜止或移動中,都可以符合 我們所想要估測的施力資訊。。42
圖 4-5、行動輔助機器人在無移動下的施力估測模擬結果
43
圖 4-7、行動輔助機器人在 X 軸方向移動的施力估測模擬結果
44
圖 4-9、行動輔助機器人在 Y 軸方向移動的施力估測模擬結果
45
圖 4-11、行動輔助機器人在 Z 軸方向旋轉的施力估測模擬結果
46
4.3 行動輔助機器人之順應性控制模擬與實驗
4.3.1 行動輔助機器人之順應性控制模擬
在順應性控制模擬中,我們設定期望質量Md =diag(11,11,1.34),單位為 kg 和 kg-m2,而期望阻尼為Dd = daig(36,36,4),單位為 Nt⋅s/m 與(Nt⋅m)⋅s/rad,我們分別對三 方向施於一虛擬外力,並檢視其估測的外力大小及方向,以及機器人速度的反應。圖 4-13、圖 4-15、圖 4-17 分別對 X 軸、Y 軸、Z 軸施與一虛擬的外力,圖中的(a)(c)(e)為 虛擬的外力與估測出的結果圖,圖中的(b)(d)(f)為機器人的反應速度,我們可以發現在 無外力輸的入的情況下,機器人反應速度為零,若一外力輸入後,機器人會順應著外力 方向而移動或轉動。圖 4-14、圖 4-16、圖 4-18 分別為圖 4-13、圖 4-15、圖 4-17 模擬情 下的四個馬達電流結果,分別為圖中的(a)(b)(c)(d),由於在無外力輸入下,機器人無移 動處於靜止平衡的狀態,因此馬達電流為零,反之,當外力輸入下,電流與轉速會先發 生變化,透過力估測器估測出力的大小並交由順應性控制器計算並給予相對應的速度命 令,因此機器人移動,馬達電流將不再為零。 圖 4-13、X 方向之順應性控制模擬47
圖 4-14、X 方向之順應性控制模擬的馬達電流結果
48
圖 4-16、Y 方向之順應性控制模擬的馬達電流結果
49 圖 4-18、Z 方向之順應性控制模擬的馬達電流結果
4.3.2 行動輔助機器人之順應性控制實驗
根據圖 2-15 所提的順應性控制架構,我們針對三方向做一順應性控制實驗,圖 4-19 為機器人的三方向的定義圖。在我們得到外力估測資訊後,我們透過順應性控制器,去 計算出相對應的速度命令,並對速度控制系統下達命令,使行動輔助機器人移動。在圖 4-20為使用行動輔助機器人的情況,使用者透過行動輔助機器人上的扶手攙扶並施予外 力。圖 4-21 到圖 4-26 為三方向的順應性控制實驗,其順應性控制器的參數設定,如式 (3-13)中的期望質量與期望阻尼係數我們先設定為Md =diag(10 ,10 ,0.6),單位為 kg 和 kg-m2,Dd =diag(40 ,35 ,3.5),單位為 Nt⋅s/m 與(Nt⋅m)⋅s/rad。圖 4-21 為當使用者透過扶 手對行動輔助機器人的 X 軸施予一外力時,X 軸的外力估測會估測出較大的輸入,如圖 4-21(a)(c)(e)所示,因此順應性控制器會計算出相對應的速度命令下達於速度控制系統, 使機器人會往此方向行走,圖 4-21(b)(d)(f)為機器人移動速度,由於施力的不均勻,故 Y 軸與 Z 軸並非全為零的外力輸入。圖 4-23 為使用者朝向 Y 軸施予一外力,如圖50 4-23(a)(c)(e)所示,此時機器人則主要著像 Y 軸所移動,其移動速度如圖 4-23(b)(e)(f)所 示。圖 4-25 為使用者對 Z 軸施予一轉矩,因此在圖 4-25(a)(c)(e)可發現估測結果在 Z 軸 產生一轉矩,因此透過順應性控制器在 Z 軸上計算出像對應的速度,使機器人旋轉,其 旋轉速度如圖 4-25(b)(e)(f)所示。圖 4-22、圖 4-24、圖 4-26 為三方向的順應性控制實驗 中,所量測到的馬達電流,在無外力施加時,馬達電流為零,在施加外力的瞬間,馬達 電流與轉速皆會發生變化,因此從外力估測器可以估測出施加的外力,而當外力消失 時,機器人會停止,此時電流亦降至為零。 圖 4-19、機器人實驗中方向定義圖 圖 4-20、行動輔助機器人的使用情形
51
圖 4-21、X 方向的順應性控制實驗結果
52
圖 4-23、Y 方向的順應性控制實驗結果
53
圖 4-25、Z 方向的順應性控制實驗結果
54
4.3.3 順應性控制器參數變化的影響
在上一章 3.2.2 節裡,我們提到在期望質量 Md與阻尼 Dd改變時將會改變行動輔助 機器人的順應性移動的性能,使機器人能夠滿足使用者的需求,因此我們針對這部分作 一實驗加以驗證,在實驗中我們將機器人的限速設定於最快每秒 0.4 公尺的移動速度, 由於目的是希望給予老年人使用,故將速度設限於每秒 0.4 公尺,而機器人依馬達能供 給的速度最快可達約每秒 2.5 公尺的速度。圖 4-27 為當期望質量 Md變化時,機器人反 應的變化,圖 4-27(a)、(c)為 Md =30下所估測到的施力與機器人反應速度,圖 4-27(b)、 (d)為 Md =44.6下所估測到的施力與機器人反應速度,在圖 4-27(a)、(b)我們可以發現輸 入的力大小相似,但所對應的反應速度卻有所不同,圖 4-27(d)速度爬升的較圖 4-27(c) 慢,而在使用者實驗推動時也可明顯發現機器人有變的較重的感覺,但當推到穩定速度 時,由於兩者的期望阻尼 Dd設定相同,因此推動起來就無太大差異。 圖 4-27、期望質量 Md的影響實驗55
第五章 結論與未來展望
本論文設計了一個以全向式移動平台為移動基礎的行動輔助機器人,利用移動平台 上馬達的電流與轉速去推算行動輔助機器人所受的外力大小及方向,當使用者施予行動 輔助機器人一外力時,機器人能夠順應著此外力方向移動並以外力大小改變移動速度, 以達成行動輔助的功能。 在行動輔助機器人的移動平台上考量到未來可增加自主式智慧行為與看護等功 能,因此採用主動式的行動輔助機器人,並利用四個全向輪所構成的全向式移動平台, 提高行動輔助機器人的機動性。為了提高行動輔助機器人在使用中的安全性,我們將行 動輔助機器人仿效成一被動式行動輔助機器人,亦即將主動式行動輔助機器人仿效成一 質量-阻尼模型,並透過所設計的期望質量與期望阻尼係數的調整來適應使用者在操作 上的需求,因此行動輔助機器人可以順應著使用者的推力大小及方向來移動。 在為了得知力的資訊,我們捨棄較昂貴且裝設較為複雜的力覺感測器,而採用低成 本且裝設簡單,只需量測馬達電流及轉速,並設計一外力估測器即可估測行動輔助機器 人的受力大小及方向。在模擬及最後實驗中可以呈現出,行動輔助機器人能夠估測出外 在受力並根據此受力大小及方向移動,完成行動輔助機器人的順應性控制。 本論文以行動輔助機器人設計為起頭,其研究以如何提供使用者行動輔助的功能為 主,但在行動輔助上還有許多問題上還需解決,例如行動輔助機器人供使用者做支撐 時、在斜坡上行走以及環境中障礙物的閃躲等問題,這些在未來可加裝額外的感測器來 感測環境資訊並解決上述之問題,而增加額外感測器可增加多種智慧型行為,以提供居 家照護,並提供更多的人機互動等功能,讓行動輔助機器人不僅僅可以提供使用者在移 動上的協助,在生活、娛樂及醫療上都能給予協助。56
參考文獻
[1] Y. Hirata, A. Hara and K. Kosuge, “Passive-type intelligent walking support system RT Walker,” Proc. of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 2004, pp.3871-3876.
[2] Y. Hirata, A. Hara and K. Kosuge, “Motion control of passive-type walking support system based on environment information,” Proc. of the 2005 IEEE International Conference on Robotics and Automation, Bacerlona, Spain, 2005, pp.2932-2937.
[3] Y. Hirata, A. Muraki and K. Kosuge, “Motion control of intelligent passive-type walker for fall-prevention function based on estimation of user state,” Proc. of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 2006, pp. 3498-3503.
[4] Y. Hirata, T. Baba and K. Kosuge, “Motion control of omni-directional type walking support system "Walking Helper",” Proc. of IEEE international Workshop on Robot and Human Interactive Communication, Millbrae, California, USA, 2003, pp.85-90.
[5] O. Chuy, Y. Hirata, and K. Kosuge, “Control of Walking Support System Based on Variable Center of Rotation,” Proc. of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 2004, pp.2289-2294.
[6] O. Chuy, Y. Hirata, and K. Kosuge, “Online Approach in Adapting user Characteristic for Robotic Walker Control,” Proc. of the 2005 IEEE International Conference on Rehabilitation Robotics, Chicago, IL, USA, 2005, pp.139-142.
[7] O. Chuy, Y. Hirata, Zhidong Wang and K. Kosuge, “Motion control algorithms for a new intelligent robotic walker in emulating ambulatory device function,” Proc. of the 2005 IEEE International Conference on Mechatronics and Automation, Niagara Falls, Canada, 2005, pp. 1509-1514.
[8] O. Chuy, Y. Hirata, Zhidong Wang and K. Kosuge, "A Control Approach Based on Passive Behavior to Enhance User Interaction,” Prof. of the IEEE Transactions on Robotics, Vol. 23, No. 5, 2007, pp.899-908.
[9] N. Nejatbakhsh, Y. Hirata, K. Kosuge, “Passive omnidirectional walker - design and control -,” Proc. of the 2005 IEEE International Conference on Advanced Robotics, Seattle, WA, USA 2005, pp.518-523.
57
[10] S. Dubowsky, F. Genot, S.Godding, H. Kozono, A. Skwersky, H. Yu and L. S. Yu, “PAMM - A robotic aid to the elderly for mobility assistance and monitoring: A "helping-hand" for the elderly,” Proc. of IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 2000, pp.570-576.
[11] M. Spenko, H. Yu and S. Dubowsky, “Robotic personal aids for mobility and monitoring for the elderly,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 14, No. 3, pp.344-351, 2006.
[12] J. Manuel, H. Wandosell and B. Graf, “Non-Holonomic Navigation System of a Walking-Aid Robot”, Proc. of IEEE international Workshop on Robot and Human Interactive Communication, Berlin, Germany, 2002, pp.518-523.
[13] B. Graf, “Reactive navigation of an intelligent robotic walking aid,” Proc. of IEEE International Workshop on Robot and Human Interactive Communication, French, Embassy, Japan, 2001, pp.353-358.
[14] B. Graf, A. Hans, J. Kubacki and R.D. Schraft, “Robotic home assistant Care-O-bot II,” Proc. of IEEE EMBS/BMES Conference, Houston, TX, USA, 2002, pp. 2343-2344. [15] A. Morris, R. Donamukkala, A. Kapuria, A. Steinfeld, J.T. Matthews, J. Dunbar-Jacob
and S. Thrun, “A Robotic Walker That Provides Guidance,” Proc. of IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 2003, pp.25-30.
[16] M. Pollack, S. Engberg, J.T. Matthews, S. Thrun, L. Brown, D. Colbry, C. Orosz, B. Peintner, S. Ramakrishnan, J. Dunbar-Jacob, C. McCarthy, M. Montemerlo, J. Pineau and N. Roy, “Pearl: A mobile robotic assistant for the elderly,” Workshop on Automation as Caregiver: the Role of Intelligent Technology in Elderly Care (AAAI), Edmonton, Canada, 2002, pp. 85-92.
[17] Y. Nemoto, S. Egawa, A. Koseki, S. Hattori, T. Ishii and M. Fujie, “Power-assisted walking support system for elderly,” Proc. of IEEE International Conference on Engineering in Medicine and Biology Society, Hong Kong, China, 1998, pp.2693-2695. [18] A. M. Sabatini, V. Genovese and E. Pacchierotti, “A mobility aid for the support to
walking and object transportation of people with motor impairments,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 2002 pp.1349-1354.
[19] Tong-Jin Park, Jae-Ho Jang and Chang-Soo Han, “Walking assistant service mobile robot using lever mechanism and wireless Internet communication,” Proc. of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Port Island, Kobe, Japan, 2003, pp.657-662.
![圖 1-4、 PAMM SmartWalker prototype[6-7]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8394521.178853/14.892.277.660.799.1079/圖-pamm-smartwalker-prototype.webp)