電 機 與 控 制 工 程 研 究 所
碩
士
論
文
應
用於三相直流無刷馬達之 150 度 12 步方波
無感測驅動技術與速度控制
Twelve-Step Sensorless Drive and Speed Control for a
Three-Phase Brushless DC Motor
研 究 生
: 吳昱錚
指導教授: 林錫寬博士
Twelve-Step Sensorless Drive and Speed Control for a
Three-Phase Brushless DC Motor
研 究 生
: 吳昱錚
Student: Yu-Cheng Wu
指 導 教 授 : 林錫寬博士
Advisor: Dr. Shir-Kuan Lin
國 立 交 通 大 學
電 機 與 控 制 工 程 研 究 所
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering
College of Electrical Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Master of Engineering
in
Electrical and Control Engineering
June 2008
Hsinchu City, Taiwan
學生: 吳昱錚
指 導 教 授 : 林錫寬博士
國立交通大學電機與控制工程研究所
摘
要
小型三相無刷直流馬達具有高可靠性、高效率和可控制性的優點,已被廣泛 的應用於各種場合。然而,傳統的小型三相無刷直流馬達必須利用霍爾元件 (Hall sensor) 來偵測其轉子與定子之相對位置,其限制有:感測器須精準地擺放在馬達 旁特定位置才能準確地獲得轉子目前狀況、對於溫度與雜訊具有高敏感度、降低 馬達壽命、增加成本與阻礙馬達輕薄短小化。而沒有使用霍爾元件的無感測驅動 技術則可以改善上述的各項缺點。 本論文以 150 度無感測換相為基礎 [13],藉由馬達的電壓與電流回授訊號達 到正常驅動的目的。克服脈波寬度調變 (PWM) 訊號對無感測換相的影響,進一 步延伸推展至對其實現速度控制,並利用線性調變與數位濾波器兩種不同的方式 使得馬達可控速度範圍增加,再者加入反積分過飽和控制器使整體速度響應更為 良好,最後利用此設計開發一個小型三相無刷直流馬達的數位式無感測馬達控制 晶片,而本文主要成果已發表在期刊論文 [10]上。 實驗運用場效型可規劃邏輯陣列元件 (FPGA) 和硬體描述語言 (VHDL) 進 行系統層級模組化設計。其中,估算線性調變函式以使馬達轉速降低同時正常 換相;使用數位濾波器以克服 PWM 訊號對換相訊號所造成之干擾;加入反積 分過飽和控制器使馬達速度響應表現提升。因此,FPGA 晶片內部運算搭配外 部馬達、六橋驅動電路、AD 電流回授與電壓感測,完成三相無刷直流光碟機馬 達 150 度無感測控制系統的建構與實作驗證。Student: Yu-Cheng Wu
Advisor: Dr. Shir-Kuan Lin
Submitted to Department of Electrical and Control Engineering
College of Electrical Engineering
National Chiao Tung University
ABSTRACT
Small three-phase brushless direct current motors (BLDCMs) that own high reliability, high efficiency and good controllability are extensively adopted. How-ever, the traditional BLDCMs have to use Hall sensors to detect the corresponding position of the rotor and the stator which leads to some limitations: The Hall sen-sors must be located precisely in the specific position beside the motor in order to exactly acquire the present state of the rotor; High sensitivity to temperture and disturbance; Life reducing; Cost increasing and obstruct the minimization of it. Us-ing the sensorless drive schemes which do not rely on the Hall senors can improve various drawbacks mentioned above.
On the basis of the 150° sensorless drive scheme [13], depended on the volt-age and feedback current signals of the motor to reach the goal of normal drive. Overcome the influence of the pulse width modulation (PWM) signal during com-mutation for the purpose of controlling its speed. ; Apply two approaches: Linear modulation approach and digital filter approach for the purpose of increasing its con-trollable speed range; Attach an anti-windup controller for the propose of improving its speed response, and finally use these schemes to develop a digital sensorless drive chip applied to small BLDCMs. The main results of this thesis have already pub-lished in the form of a journal paper [10] in Journal of Applied Physics.
tem planning level and module design. It includes estimating the linear modulated equation in order to normally commute while the speed of the motor is decreasing, applying a digital filter to overcome the disturbed commutation signal caused by PWM signal, and attaching an anti-windup controller to improve the speed response. As a result, the interior operations of the FPGA chip accompany peripheral motor, six-bridge circuit, feedback current using AD and voltage sensing to construct and verify a 150° sensorless drive control system.
感謝指導教授林錫寬博士,在兩年研究生涯的諄諄教誨,使得本論文得以順 利完成,並感謝口試委員蔡明祺教授、鄭木火教授與張文中教授能在百忙中來參 加我的論文口試,並對論文中尚須改進的部份提出建議與指正,使本論文更為嚴 謹。 感謝亞力電機的方志行博士,在論文研究過程中給予我許多建議;感謝博士 班王超民學長以及碩士班的蔡鎧鍾、林凱祥學長及魏愷學姊,教導了我許多研究 中專業的知識,使我獲益良多。感謝實驗室同學振國與宜釗以及學弟妹淑婷、以 軒與建智。感謝好友偉程、智翔、與宜新在研究的日子裡所給予的勉勵與支持。 感謝一起從動機過來電控打拼的夥伴威儀、又誠、清泉與英哲。 感謝爸媽以及妹妹,在這段時間所給予的關懷與付出,讓我可以專心的完成 論文。另外也感謝綺恩的陪伴與支持。最後再次謝謝週遭關心我的師長與朋友, 願將這份喜悅與你們分享。
書名頁 . . . i 中文摘要 . . . ii 英文摘要 . . . iii 誌謝 . . . v 目錄 . . . vi 表目錄 . . . ix 圖目錄 . . . x 1 緒論 . . . 1 1.1 研究動機與目的 . . . 1 1.2 研究方法與系統描述 . . . 2 1.3 論文架構 . . . 2 2 三相直流無刷馬達相關知識 . . . 4 2.1 馬達結構概述 . . . 4 2.2 馬達之數學模型 . . . 6 2.3 三相無刷直流馬達驅動原理 . . . 8 2.3.1 公式推導與基本觀念 . . . . 8 2.3.2 120 度六步方波驅動原理 . . . 10 2.3.3 180 度六步方波驅動原理 . . . 12 2.4 無感測驅動方法 . . . 13 3 150 度無感測驅動控制實現方法 . . . 16
3.2 150 度 12 步方波驅動 . . . 18 3.3 閉迴路速度控制 . . . 21 3.3.1 脈波寬度調變產生器 . . . 21 3.3.2 零交越點之偵測 . . . 23 3.3.3 轉速與電流 PI 控制器 . . . 28 3.3.4 反積分過飽和控制器 [12] . . . 31 4 各模組規劃與模擬驗證 . . . 34 4.1 無感測驅動各功能模組規劃與模擬 . . . 34 4.1.1 開關控制模組 . . . 35 4.1.2 定位與開迴路模組 . . . 36 4.1.3 閉迴路模組 . . . 38 4.1.4 線性調變模組 . . . 41 4.1.5 數位濾波模組 . . . 43 4.1.6 模式切換模組 . . . 44 4.1.7 六橋輸出與脈波寬度調變模組 . . . 47 4.1.8 錯步偵測模組 . . . 50 4.1.9 轉速計算模組 . . . 52 4.1.10 PI控制器模組 . . . 54 4.1.11 反積分過飽和控制器模組 . . . 56 4.1.12 晶片內部整體架構 . . . 57
5.1.1 外部驅動電路 . . . 59
5.1.2 Altera DE1 FPGA 發展版 . . . 60
5.2 實驗結果 . . . 62 5.2.1 電壓波形 . . . 63 5.2.2 電流波形 . . . 65 5.2.3 速度響應 . . . 66 5.2.4 震動量值 . . . 68 6 結論與未來展望 . . . 72 參考文獻 . . . 73
2.1 三相直流無刷馬達規格 . . . 5 2.2 120 度六步方波換相時間表 . . . 10 2.3 180 度六步方波的換相時間表 . . . 12 3.1 150 度 12 步方波的換相時間表 . . . 19 4.1 開關控制模組各訊號定義 . . . 35 4.2 定位與開迴路模組各訊號定義 . . . 37 4.3 閉迴路模組各訊號定義 . . . 39 4.4 線性調變模組各訊號定義 . . . 41 4.5 數位濾波模組各訊號定義 . . . 43 4.6 模式切換模組各訊號定義 . . . 45 4.7 六橋輸出與脈波寬度調變模組各訊號定義 . . . 47 4.8 六橋輸出旗標與六橋開關訊號對應表 . . . 48 4.9 錯步偵測模組各訊號定義 . . . 50 4.10 轉速計算模組各訊號定義 . . . 52 4.11 轉速 PI 控制器模組各訊號定義 . . . 55 4.12 電流 PI 控制器模組各訊號定義 . . . 55 4.13 反積分過飽和控制器模組各訊號定義 . . . 56 5.1 Altera Cyclone II 2C20 晶片規格 . . . 62
2.1 馬達之轉子與定子 . . . 4 2.2 馬達出線之兩種方式:(a)三線式;(b)四線式 . . . 5 2.3 馬達各部份零件 . . . 6 2.4 三相馬達等效電路圖 . . . 6 2.5 θr 與 θs 之定義圖 . . . 9 2.6 三相無刷直流馬達之轉子與定子展開圖 . . . 10 2.7 120 度六步方波換相電壓與電流波形圖 . . . 11 2.8 120 度六步方波驅動之馬達轉矩圖 . . . 11 2.9 180 度六步方波換相電壓與電流波形圖 . . . 12 2.10 180 度六步方波驅動之馬達轉矩圖 . . . 13 2.11 無感測驅動程序 . . . 13 3.1 120 度驅動之相關訊號波形 . . . 16 3.2 Zd 與 Pd 之關係波形 . . . 17 3.3 數位式相位移器操作示意圖 . . . 17 3.4 150 度驅動之相關訊號波形 . . . 20 3.5 脈波寬度調變技術操作原理 . . . 22 3.6 馬達外部驅動電路示意圖 . . . 23 3.7 PWM 干擾示意圖 . . . 23 3.8 PWM 模式與線性模式切換示意圖 . . . 24
3.11 D 正反器示意圖與其真值表 . . . 27 3.12 RS 正反器示意圖與其真值表 . . . 27 3.13 數位濾波器架構圖 . . . 27 3.14 電流回授處理流程圖 . . . 30 3.15 轉速與電流控制器方塊圖 . . . 30 3.16 PI 控制器方塊圖 . . . 31 3.17 回授系統方塊圖 . . . 32 3.18 加入反積分過飽和控制器之回授系統方塊圖 . . . 33 3.19 反積分過飽和控制器之實現方式 . . . 33 4.1 無感測驅動晶片系統架構方塊圖 . . . 34 4.2 開關控制模組 . . . 35 4.3 開關控制模組流程圖 . . . 36 4.4 開關控制模組模擬結果 . . . 36 4.5 定位與開迴路模組 . . . 36 4.6 定位與開迴路模組流程圖 . . . 37 4.7 定位與開迴路模組模擬結果之一 . . . 38 4.8 定位與開迴路模組模擬結果之二 . . . 38 4.9 閉迴路模組 . . . 38 4.10 閉迴路模組流程圖 . . . 40
閉迴路模組模擬結果之二 . . . 40 4.13 線性調變模組 . . . 41 4.14 線性調變模組流程圖 . . . 42 4.15 線性調變模組模擬結果之一 . . . 42 4.16 線性調變模組模擬結果之二 . . . 42 4.17 數位濾波模組 . . . 43 4.18 數位濾波模組模擬結果 . . . 44 4.19 模式切換模組 . . . 44 4.20 模式切換模組流程圖 . . . 46 4.21 模式切換模組模擬結果 . . . 46 4.22 六橋輸出與脈波寬度調變模組 . . . 47 4.23 六橋輸出與脈波寬度調變模組模擬結果 . . . 49 4.24 六橋輸出與脈波寬度調變模組模擬結果 . . . 49 4.25 六橋輸出與脈波寬度調變模組模擬結果 . . . 49 4.26 六橋輸出與脈波寬度調變模組模擬結果 . . . 49 4.27 錯步偵測模組 . . . 50 4.28 錯步偵測模組流程圖 . . . 51 4.29 錯步偵測模組模擬結果 . . . 51 4.30 轉速計算模組 . . . 52 4.31 錯步偵測模組流程圖 . . . 53 4.32 轉速計算模組模擬結果之一 . . . 53
轉速 PI 控制器模組 . . . 54 4.35 電流 PI 控制器模組 . . . 54 4.36 PI 控制器模組模擬結果 . . . 56 4.37 反積分過飽和控制器模組 . . . 56 4.38 反積分過飽和控制器模組模擬結果 . . . 57 4.39 晶片內部整體架構圖 . . . 57 5.1 系統硬體架構方塊圖 . . . 58 5.2 150 度無感測驅動控制系統實驗平台 . . . 59 5.3 外部驅動電路圖 . . . 59
5.4 Altera DE1 FPGA 發展版 [11] . . . 60
5.5 Altera DE1 FPGA 發展版內部架構 [11] . . . 62
5.6 轉速 5000 RPM 下使用線性調變法之馬達三相端電壓與中心相訊號 波形圖 . . . 63 5.7 轉速 1000 RPM 下使用線性調變法之馬達三相端電壓與中心相訊號 波形圖 . . . 63 5.8 轉速 5000 RPM 下使用數位濾波法之馬達三相端電壓與中心相訊號 波形圖 . . . 64 5.9 轉速 1000 RPM 下使用數位濾波法之馬達三相端電壓與中心相訊號 波形圖 . . . 64 5.10 馬達某相電壓與零交越訊號波形圖 . . . 65 5.11 PWM 訊號輸入方式對導通相電流影響波形圖 . . . 66 5.12 內嵌線性調變法之 150 度無感測驅動速度響應圖 . . . 67
5.14 內嵌數位濾波法之 150 度無感測驅動速度響應圖 . . . 68 5.15 震動量測實驗平台 . . . 69 5.16 150 度無感測驅動之軸向震動量值 . . . 69 5.17 150 度無感測驅動之徑向震動量值 . . . 70 5.18 120 度與150 度無感測驅動之軸向震動量值 . . . 70 5.19 120 度與 150 度無感測驅動之徑向震動量值 . . . 71
1.1
研
研
研究
究
究
動
動機
動
機
機與
與
與目
目
目的
的
的
無刷直流馬達 (Brushless DC Motor, BLDCM) 為一良好、便利、可控且穩定 的驅動裝置,所以應用範圍廣泛,除了一般使用在工業用途外,在家電與 3C 產 品上的例子更是不勝枚舉。而其是利用位置感測器,取代傳統有刷直流馬達的換 向器 (Commutator) 及碳刷 (Brush) 等整流機械結構,傳統的有刷直流馬達存在 著換向器及碳刷的消耗與接觸所產生的摩擦力、電氣雜訊等問題,相形之下,無 刷直流馬達具有低噪音、低雜訊、高使用壽命、高速度與小型化等優點,隨著半 導體元件成本的降低與技術的進步,無刷直流馬達在自動化伺服控制系統中,已 漸漸取代直流有刷馬達。 現行的無刷直流馬達驅動多是採用感測器來偵測馬達轉子的位置,如霍爾元 件、光編碼器或解角器等,加裝了這些位置感測器後,驅動器才能送出適當的換 相訊號使馬達正常旋轉,而換相控制的準確與否將會直接影響到閉迴路位置、速 度控制的性能表現;然而,若要求提高這些感測器的解析度,以求增加換相控制 的精準度,其生產成本將愈加昂貴,且感測元件的存在將使得系統體積小型化受 到限制。 面對各種產品的「輕薄短小化」趨勢,馬達的小型化、薄型化、高性能化與 高精密度化已是不可避免的趨勢。然而,隨著馬達縮小體積,位置感測器所佔的 空間就成為阻礙薄型化的一個重要因素。此外,位置感測器本身壽命與對溫度、 雜訊敏感等因素容易造成感測元件的可靠性降低,進而影響換相控制的可靠度, 也相對地限制了馬達應用的環境與場合。所以,不需使用各種位置感測器的無感 測驅動技術可以減少馬達廠商為了找出感測器擺放的準確位置所花的時間與人 力,以及上述所提之感測元件的種種限制,而成為一極具發展潛力的驅動技術。 本文目的針對小型三相無刷直流馬達,以 120 度無感測換相控制為基礎,進 而推展至 150 度無感測速度控制,並改良 150 度十二步方波驅動,使可控速度範 圍加大;使震動量減小,藉由馬達回授的電壓、電流訊號,估測適當的馬達換相 點,達到無感測控制的目的。1.2
研
研
研究
究
究方
方
方法
法
法與
與
與系
系
系統
統
統描
描
描述
述
述
本文主要是探討有關小型直流無刷馬達應用於無感測技術驅動上所產生的一 些問題。先前的 120 度無感測驅動技術 [13]是利用馬達的未激發相感應電動勢的 零交越點來偵測適當換相的時機,而本文則是將其原有技術推展至 150 度無感測 驅動,使馬達在運轉時能產生較大轉矩,並利用線性遞減的方式調變脈波寬度調 變訊號 (PWM) 之不可控範圍,使馬達可於極低速下運轉,增加整體速度的可控 範圍;利用一數位濾波器使 PWM 對換相訊號所產生之干擾可以被消除,進而 可移除不可控之 PWM 調變區間,同樣達到可控速度區間增大並震動量減小之 效果;加入反積分過飽和控制器,使馬達表現出之速度響應更為良好。最後將 整體結果於一可規劃邏輯陣列元件 (FPGA) 發展板上作驗證,並採用硬體描述 語言 (VHDL) 與 FPGA 晶片設計軟體 (Qartus) ,將其各個功能模組化並逐一實 現,接著整合此系統晶片與外部的驅動電路結合而完成一套以 FPGA 為基礎的三 相直流無刷無感測驅動系統。1.3
論
論
論文
文
文架
架
架構
構
構
本論文架構可分為六個章節: 第一章:緒論 介紹研究此主題的動機與欲達成之目的,接著說明所使用的研究方法並對整 體的系統作一簡略描述。 第二章:三相直流無刷馬達相關知識 說明馬達的內部構造及其數學模型方程式,並對先前所使用的無感測驅動技 術作一敘述。 第三章:150 度無感測驅動控制實現方法 首先說明此系統的驅動方式及步驟,達成基本的速度控制,其次額外加入線 性調變法、數位濾波法以及反積分過飽和控制器使系統整體表現更加完善。第四章:各模組規劃與模擬驗證 主要包括晶片設計軟體的操作簡介,各功能模組化之介紹,以及最後的模擬 驗證結果。 第五章:系統硬體架構與實驗結果分析 介紹整體系統架構,包括 FPGA 發展版與外部的驅動電路,另外對實驗結果 作一分析與比較。 第六章:結論與未來展望 對於上述五章之內容提出結論,並提出未來可再繼續發展之方向。
為了使讀者對本論文之實驗有更深入的了解並詳知之後的理論推導與實作方 法,在此章將對馬達的結構、驅動方式以及其原理與相關知識作一基本介紹。
2.1
馬
馬
馬達
達
達結
結
結構
構
構概
概
概
述
述
述
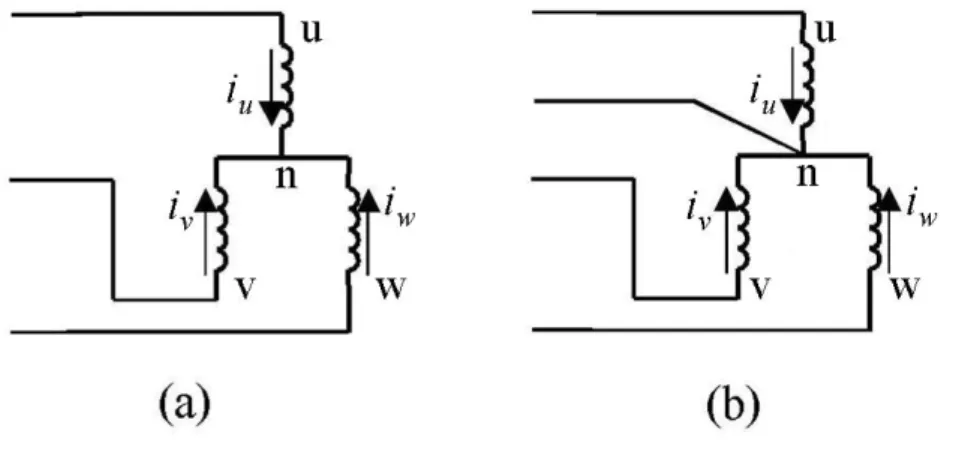
本文所討論之馬達為九槽十二極之三相直流無刷馬達(應用於光碟機中);九 槽指馬達內部定子有九個槽;十二極為馬達外部轉子共有十二極,如圖 2.1所示。 而外部轉子為永久磁鐵所構成,因此每一極所佔角度為 30 度機械角;內部定子 由線圈纏繞鐵心所構成,繞組出線方式為三線式;分別為 u、v、w 三相繞組,並 與馬達之驅動器相連接。此外馬達定子旁設置三個霍爾感測器,用來偵測轉子與 定子之相對位置,並回授訊號給驅動器,藉此感測器輸出訊號驅動器才能適時切 換改變電流方向,產生一正向力矩,馬達始能正常運轉。 圖 2.1: 馬達之轉子與定子 近幾年三相直流無刷馬達為了實現薄型化及省電化,已有廠商利用無感測型 的三相直流無刷馬達取代具有霍爾感測器的三相直流無刷馬達,無感測型的三相 直流無刷馬達其出線方式大多為四線式,如圖 2.2所示,其中心相 n 必須被引入 外部驅動器中,方可藉定子線圈中的感應電動勢 (back electromotive force) 來判 斷換相點。圖 2.2: 馬達出線之兩種方式:(a)三線式;(b)四線式 由於本論中所使用之馬達已預先將霍爾感測器摘除,因此必須藉由無感測驅 動技術來判斷馬達轉子與定子之相對位置,以適當切換電流方向,使馬達產生 一正向力矩,以便於順利運轉。而馬達之規格及內部各部份零件定義如表 2.1與 圖 2.3所示。 表 2.1: 三相直流無刷馬達規格 λr 7.62 × 10−4 W b − turn Ls 0.63 mh Rs 2.2 Ω J 17 × 10−7 kgm2 Bm 5 × 10−3 N tm/(rad/sec) M 0.37 mh
圖 2.3: 馬達各部份零件
2.2
馬
馬
馬達
達
達
之
之
之數
數
數
學
學
學模
模
模型
型
型
三相無刷直流馬達由三個定子線圈與轉子上的永久磁鐵所組成,而其 Y 接方 式之線圈等效電路如圖 2.4所示,在此假設三相線圈上之等效電阻及等效電感均相 同,則透過等效電路圖可以看出每一相皆是由馬達的等效電阻、等效電感與旋轉 時所產生的感應電動勢所組成。其中 L 為等效電感值,包括相自電感 Lp 及相互 電感 M ,而定義各相電流由相端點流入中心相 n 之方向為正電流。 圖 2.4: 三相馬達等效電路圖三相無刷直流馬達之參數與變數定義如下: Vun , Vvn , Vwn : u, v, w三相相電壓 iu , iv , iw : u, v, w三相相電流 eu , ev , ew : u, v, w三相感應電動勢 n:中心相 Lp : 馬達繞組的的相電感值 M : 馬達任兩相的互感值 R : 定子線圈的阻抗值 Bm:馬達阻尼係數 J:馬達慣量 Ke : 感應電動勢常數 Kt : 扭矩常數 Te : 馬達轉矩 TL : 負載轉矩 P : 轉子磁鐵極數 ωr : 馬達轉速 θe : 馬達轉子電氣角度 藉由上述之等效電路圖與定義各參數,即可由克西荷夫定律及牛頓運動定律 分別推導出三相無刷直流馬達之電氣方程式(2.1)與機械方程式(2.3)。 Vun Vvn Vwn = R 0 0 0 R 0 0 0 R iu iv iw + Lp −M −M −M Lp −M −M −M Lp · iu · iv · iw + eu ev ew (2.1) eu ev ew = 2ωrKe P sin θe sin(θe− 2π3 ) sin(θe+ 2π3 ) (2.2)
Te= Kt(iu− iv 2 − iw 2 ) sin θe+ √ 3 2 (iw − iv) cos θe = 2J P ω˙r+ 2Bm P ωr+ TL (2.3)
2.3
三
三
三相
相
相無
無
無刷
刷
刷直
直
直流
流
流
馬
馬
馬達
達
達驅
驅
驅動
動
動原
原
原理
理
理
2.3.1
公
公
公式
式
式推
推
推導
導
導
與基
與
與
基
基本
本
本觀
觀
觀念
念
念
由於三相無刷直流馬達的外部轉子是由永久磁鐵所構成,所以若欲使馬達轉 子作一旋轉運動,則必須使內部定子之磁場依照轉子之相對位置作適時變換,而 經由輸入不同電流方向於定子線圈中可使馬達內部產生電磁場變化進而生成一轉 矩,但因為此時定子為固定,所以其將會產生一反作用力推動外部轉子,使馬達 開始旋轉。為了使馬達在旋轉時有最大的轉矩輸出,一般通常採用六步方波驅動 法,其公式推導及基本觀念敘述如下: 根據佛萊明左手定律,可得產生於內部定子之電磁力 F = N · L · I · B (2.4) 馬達轉矩則為 T = F · r = N · L · I · B · r = Kt· I (2.5) 而磁通密度 B 與 θr、θs 之關係如下 B = B(θr, θs) = Bmax· cos[ P 2(θr− θs) ] (2.6) 將式(2.6)代入式(2.5)可得 Kt= N · Bmax· L · r · sin( P θr 2 ) (2.7) 由式(2.7)可知當轉子轉動時扭矩常數 Kt 之變化波形為一正弦曲線。而上述變數分別定義為 N:線圈匝數 L:線圈受磁場感應的有效長度 I:線圈電流 B:磁通密度 Kt:扭矩常數 r :力臂 P:轉子永久磁鐵磁極數 θr:轉子上任一點與定子中點之角度差,如圖 2.5所示 θs:定子上任一點與定子中點之角度差,如圖 2.5所示 圖 2.5: θr 與 θs 之定義圖 六步方波驅動法依照三相線圈導通方式的不同可分為 120 度六步方波驅動 與 180 度六步方波驅動。120 度六步方波驅動法為在驅動馬達時任意導通馬達 三相中的兩相,使其一端電流流入,另一端電流流出,而第三相保持為浮接狀 態;180 度六步方波驅動法則是三相線圈皆導通,並作一相流入電流,另兩相流 出電流,或兩相流入電流,剩餘一相流出電流。
2.3.2
120 度
度
度六
六
六步
步
步方
方
方波
波
波驅
驅
驅動
動
動原
原
原理
理
理
首先定義三相無刷直流馬達之轉子與定子的初始位置,如圖 2.6所示。 圖 2.6: 三相無刷直流馬達之轉子與定子展開圖 由式(2.5)與式(2.7)可知,為了使馬達運轉時有最大轉矩輸出,則必須在不同 電器角度下選擇適當的導通電流方向,而整理出 120 度六步切換電流之時程表如 表 2.2及圖 2.7,其中表中符號 V 代表該相連接至高電壓;符號 G 代表該相接地;符號 F 代表該相為浮接狀態;圖中 Vu、Vv、Vw 為三相相電壓,Iu、Iv、Iw 為三
相相電流,θe 為電氣角度。 表 2.2: 120 度六步方波換相時間表 狀態 u 相相電壓 v 相相電壓 w 相相電壓 電流導通方向 電氣角度 狀態一 F G V w → v [-30, 30] 狀態二 V G F u → v [30, 90] 狀態三 V F G u → w [90, 150] 狀態四 F V G v → w [150, 210] 狀態五 G V F v → u [210, 270] 狀態六 G F V w → u [270, 330] 切換點:-30, 30, 90, 150, 210, 270, 330
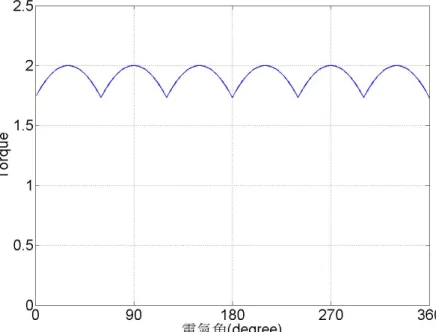
圖 2.7: 120 度六步方波換相電壓與電流波形圖 由表 2.2可知,為了使馬達轉矩最大,在電器角 -30 度到 30 度時,應選擇 w → v 的電流導通方向;而在電器角 30 度到 90 度時,應選擇 u → v 的電流導通方 向;以此類推,在 360 度的電器角間,共依序產生六組不同的電流切換方向,而 每一相定子線圈皆連續導通 120 度電器角後轉換為浮接狀態,故此法稱為 120 度 六步方波驅動法。所以只要知道目前轉子電器角位置,便可藉表 2.2適當選擇電流 導通方向,使馬達獲得一最大轉矩。若假設流經馬達線圈中電流為定值,感應電 動勢為弦波,則可得到 120 度六步方波驅動之轉矩,如圖 2.8所示。 圖 2.8: 120 度六步方波驅動之馬達轉矩圖
2.3.3
180 度
度
度六
六
六步
步
步方
方
方波
波
波驅
驅
驅動
動
動原
原
原理
理
理
180 度六步方波驅動為三組定子線圈皆為導通狀態,但電流切換方向隨著轉 子電器角度的變化而有不同的選擇,其總共會產生六組不同的導通方式。 同理,為使馬達輸出最大轉矩,在不同電器角度下,可得適當之電流導通方 式如表 2.3與圖 2.9。 表 2.3: 180 度六步方波的換相時間表 狀態 u 相相電壓 v 相相電壓 w 相相電壓 電流導通方向 電氣角度 狀態一 V G V w, u → v [0, 60] 狀態二 V G G u → v, w [60, 120] 狀態三 V V G u, v → w [120, 180] 狀態四 G V G v → w, u [180, 240] 狀態五 G V V v, w → u [240, 300] 狀態六 G G V w → u, v [300, 360] 切換點:0, 60, 120, 180, 240, 300, 360 圖 2.9: 180 度六步方波換相電壓與電流波形圖 類似 120 度六步驅動,180 度六步驅動在 360 度的電器角間,依序產生六組 不同的電流切換方向,而每一相定子線圈皆連續導通 180 度電器角後改變其電流 方向,故稱為 180 度六步方波驅動法。同理,假設流經馬達線圈中電流為定值, 感應電動勢為弦波,則可得到 180 度六步方波驅動之轉矩,如圖 2.10所示。圖 2.10: 180 度六步方波驅動之馬達轉矩圖
2.4
無
無
無感
感
感測
測
測
驅
驅
驅動
動
動方
方
方法
法
法
無感測驅動技術的旋轉可以大略分為四個程序:(1)定位;(2)開迴路啟 動;(3)閉迴路加速;(4)閉迴路等速,當依序完成這四個程序後,馬達就鎖定在第 四個步驟進行閉迴路等速的階段,如圖 2.11所示。 圖 2.11: 無感測驅動程序目前實現無感測換相控制技術大略有三種方式:偵測感應電動勢、偵測電感 變化 (inductance variation) 與偵測磁交鏈變化 (flux-linkage variation) [2] [7]。而 本文採用量測馬達三相感應電動勢來取得換相依據,其原因在於硬體電路的實現 方式較簡單,馬達的端電壓也較易量測及取得,因此成本可以降低。使用此方法 的缺點在於馬達轉速過低時,其感應電動勢太小而易受雜訊干擾,常會發生假零 交越,甚至無零交越的現象,而導致馬達無法啟動;所以在馬達啟動時需要一套 機制,解決馬達低轉速時無法利用感應電動勢換相的問題。因此定位和開迴路啟 動程序就是在避免此類的狀況而產生,希望藉由這兩個步驟的啟動程序,使轉速 上升至感應電動勢的零交越點可以被正確地解析出來;其後閉迴路加速與閉迴路 等速兩個程序便可以偵測感應電動勢以便進行換相,並藉助速度控制器達到馬達 定速度的控制。以下針對這四個程序作探討。 (1)定位: 由於馬達轉子的初始位置是未知的,為了讓馬達能夠順利旋轉,必須先透過 定位的程序,而定位的程序是藉由送出固定方向的激磁,使馬達在啟動時,瞬間 吸引轉子自行定位 (Align) 到一個轉矩為零的平衡點位置;因此,馬達在未達到 開迴路啟動前即可事先得知轉子的初始位置,即可依照開迴路序列的導通順序進 行最大轉矩的換相,使馬達能順利啟動。 (2)開迴路啟動: 由於馬達在低轉速時的感應電動勢振幅過小,因此偵測零交越點時容易受到 雜訊的干擾而造成換相點判斷錯誤,使得馬達無法順利旋轉。因此,必須藉由開 迴路啟動的程序,在未獲得足夠大的感應電動勢之前,先送出固定的換相序列, 使得馬達可以順利的旋轉,並隨著換相序列從低頻慢慢增加至高頻,使得馬達的 轉速逐漸變高,讓馬達的感應電動勢振幅隨之逐漸增加。一旦當感應電動勢不會 受到雜訊的干擾而造成換相點的判斷錯誤時,即可以進入閉迴路換相控制的程 序。 (3)閉迴路加速: 當馬達轉速提升到足以產生可解析的感應電動勢波形後,即可以進入閉迴路 換相控制的程序。在閉迴路換相控制的程序中,由於可以正確地判斷出馬達的換
相點,因此六步方波換相的邏輯即可正常的交替輸出。閉迴路換相控制的技術大 多利用感應電動勢來偵測轉子磁極的位置,進而達到換相控制的目的。在利用未 激發相感應電動勢的零交越點來判斷換相點時,需要注意切換雜訊的產生,因為 此雜訊會導致假的零交越點,而影響換相點的估測。雜訊大部分會在改變電流方 向時產生,因為電晶體在切換時,電流瞬間會流經上橋或下橋的飛輪二極體,此 時就會造成假的零交越,所以在每一次換相點後都必須克服切換雜訊所造成的假 零交越。 (4)閉迴路等速: 當轉速爬升到速度命令的轉速時,開始進入閉迴路等速程序,此時轉速可 以透過速度控制器鎖在命令轉速,不再往上爬升,就算在負載加重導致轉速 下降時,透過速度控制器也能將轉速拉回至命令轉速;無感測換相控制是利用 馬達旋轉時的感應電動勢進行換相點判斷,轉速是利用脈寬調變 (pulse-width modulation,簡稱 PWM) 信號來控制,然而換相點的判斷會受到脈衝調變信號的 干擾,因此必須利用濾波器或其他方法克服之。
本論文主要為在三相直流無刷馬達上實現 150 度 12 步方波無感測驅動技術, 並對其速度控制方面作深入的探討,而 150 度 12 步方波驅動是從 120 度 6 步方 波驅動所衍生而來,因此以下會先描述 120 度 6 步無感測技術的運行原理,而後 再進一步地說明 150 度 12 步驅動以及其相關部分。
3.1
120 度
度
度 6 步
步
步方
方
方波
波
波無
無
無感
感
感測
測
測
驅
驅
驅動
動
動
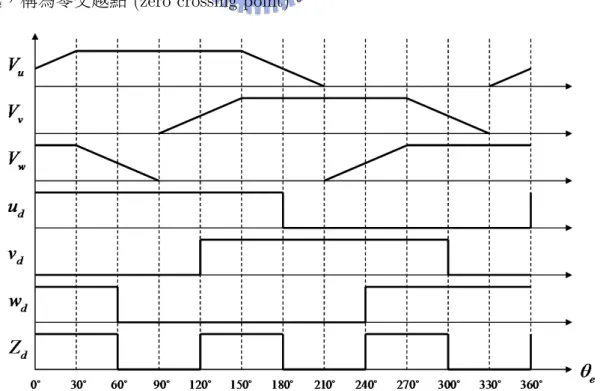
本文提出的無感測換相方法是利用馬達感應電動勢特性,將任意一相端電壓 與中心相做比較,而從中取得換相資訊。由 120 度六步方波換相時間表(表 2.2)可 以 繪 出 圖 3.1, 其 中 Vu、Vv、Vw 分 別 為 馬 達 三 相 端 電 壓 ;ud、vd、wd 分 別 為 Vu、Vv、Vw 與中心相電壓比較後之數位訊號;Zd 為由ud、vd、wd 組成之未激 發相電壓與中心相電壓比較後之數位訊號,簡稱零交越訊號,而當 Zd 的高低準 位產生變化的瞬間時代表未激發相電壓曲線上升或下降而與中心相電壓產生交 越,稱為零交越點 (zero crossing point)。同樣的由表 2.2可知關鍵的電流方向切換點發生在零交越點產生後延遲 30 度 之電器角度,也就是 30、90、150、210、270、330,所以在此需要一數位式的相 位移器來達成將整體 Zd 訊號延遲 30 度之效果,而產生換相訊號 Pd,如圖 3.2所 示,當 Pd 準位發生變化的同時,便作換相的動作。 圖 3.2: Zd 與 Pd 之關係波形
3.1.1
數
數
數位
位
位式
式
式相
相
相位
位
位移
移
移器
器
器
基本的相位移器是計數感應電動勢兩兩發生零交越點的區間 T ,即馬達旋 轉 60 度電器角度的時間,而可預估 T/2 時間,亦即 30 度電器角度。當估測出零 交越點發生後的 T/2 時間,便可正確的換相。 圖 3.3: 數位式相位移器操作示意圖圖 3.3為基本的相位移器實現原理,其中 Cp、Cn 為計數器,分別計數 Zd 之 高低準位時間(60 度電器角),其操作說明如下: 當 Zd 訊號為高準位時,Cp 開始計數;當 Zd 轉為低準位時,將 Cp 計數值 除以二並儲存在一暫存器中,而同時 Cn 開始計數,當 Cn 計數之值與暫存器值 相同時,便使換相訊號 Pd 作一準位改變,並將 Cp 值歸零,此時 Cn 仍繼續計 數,直至 Zd 準位轉為高準位時,將 Cn 值除以二並儲存在另一暫存器中;然後 同理 Cp 開始重新計數,計數至與暫存器值相同時,再使 Pd 作一準位改變,並 將 Cn 值歸零;之後不斷循環此一操作步驟,便可經由兩個簡單的計數器而達成 將 Zd 訊號延遲 30 度電器角,產生換相訊號 Pd,以利馬達憑藉此訊號作一正確 的換相動作。
3.2
150 度
度
度 12 步
步
步方
方
方波
波
波驅
驅
驅動
動
動
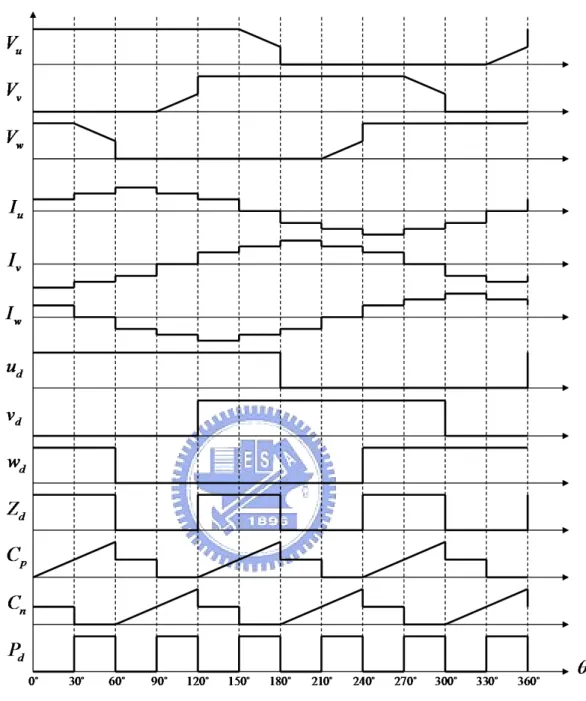
利用感應電動勢特性的 120 度六步方波驅動無感測換相方法,馬達在任意時 間只有導通任意兩相定子線圈,故在任意時間必定有一相沒有被導通,而此相稱 為未激發相。擷取未激發相電壓與中心相電壓做比較,即可獲得感應電動勢的零 交越點,以進行無感測換相運用;馬達以 180 度六步方波驅動具有轉矩大的優 點,在同樣的供給電壓下會具有較高的轉速,而 180 度六步方波驅動在任一時間 皆同時導通三相線圈,無法得到感應電動勢,故無法使用未激發相之感應電動勢 來進行無感測換相。鑒於無感測需擷取感應電動勢相關資訊的限制,和 180 度六 步方波驅動的優點,本論文提出 150 度 12 步方波進行無感測換相控制驅動,此 方法較傳統的 120 度六步方波驅動具有更大的轉矩。 由表 2.2與圖 3.2可知,在 120 度六步方波驅動下,每個狀態皆經過 60 度的電 器角,而零交越點發生之時間皆位於每個狀態的中間點,即 30、90、150、210、270 、330。因此 150 度 12 步方波驅動的基本概念為,馬達運轉時只需要在零交越點 將要出現前將驅動方式轉為 120 度以利偵測零交越點,而等到零交越點偵測完畢 之後,便將其驅動方式調整為 180 度驅動。表 3.1為 150 度 12 步方波的換相時間表,此驅動法為 120 度六步方波驅動 與 180 度六步方波驅動交替組合而成,其 12 個狀態不斷重複運行,定子線圈每 次導通馬達電氣角 150 度,故稱為 150 度 12 步方波驅動;其中狀態二、狀態 四、狀態六、狀態八、狀態十、狀態十二只導通兩相定子線圈,且導通的角度為 零交越點發生以前的馬達電氣角 30 度,所以在這些狀態時,可以利用未激發相電 壓與中心相電壓作比較得到零交越點,之後分別轉為狀態三、狀態五、狀態七、 狀態九、狀態十一、狀態一;這些狀態皆導通三相線圈,具有轉矩大的優勢,故 可以提升馬達的轉速效能。簡單的說,150 度 12 步方波驅動可比 120 度六步方波 驅動產生更大的轉矩,且具有更高的轉速效能,卻沒有 180 度六步方波驅動無法 用於無感測換相法的限制。 表 3.1: 150 度 12 步方波的換相時間表 狀態 u 相相電壓 v 相相電壓 w 相相電壓 電流導通方向 電氣角度 狀態一 V G V w, u → v [0, 30] 狀態二 V G F u → v [30, 60] 狀態三 V G G u → v, w [60, 90] 狀態四 V F G u → w [90, 120] 狀態五 V V G u, v → w [120, 150] 狀態六 F V G v → w [150, 180] 狀態七 G V G v → w, u [180, 210] 狀態八 G V F v → u [210, 240] 狀態九 G V V v, w → u [240, 270] 狀態十 G F V w → u [270, 300] 狀態十一 G G V w → u, v [300, 330] 狀態十二 F G V w → v [330, 360] 切換點:0、30、60、90、120、150、180、210、240、270、300、330、360 圖 3.4為 150 度 12 步方波驅動的相關訊號波形。其中 Vu、Vv、Vw 分別
為 馬 達 三 相 相 電 壓 ;Iu、Iv、Iw 分 別 為 馬 達 三 相 相 電 流 ;ud、vd、wd 分 別
為 Vu、Vv、Vw 與中心相電壓比較後之數位訊號;Zd 為由 ud、vd、wd 組成之
未激發相電壓與中心相電壓比較後之數位訊號;Pd 為換相訊號,當其準位改
變時即代表馬達作換相的動作,而又當 Pd 為高準位時,為兩相定子線圈導通
圖 3.4: 150 度驅動之相關訊號波形 150 度 12 步方波驅動的相位移器其操作說明如下: 假設目前轉子的電氣角為 0 度,計數器 Cp 從 Zd 的準位改變點就開始計 數 Zd 為高準位的時間,當馬達旋轉了電氣角 60 度後,感應電動勢產生零交越 點,Zd 就會轉變為低準位,此時 Cp 將計數值除以二並停止計數與送出換相訊 號 Pd 為低準位,使三相定子線圈皆導通;換計數器 Cn 開始計數 Zd 為低準位的 時間,當 Cn 計數的值與 Cp 的值一樣時,再送出換相訊號 Pd 為高準位,使兩相 定子線圈導通,並將 Cp 的值歸零,而 Cn 繼續計數;接著操作方式相似,只是 換成 Cn 計數得到馬達旋轉電氣角 60 度的時間,Cp 則計數與比較,估測延遲馬
達電氣角 30 度的時間點,換相訊號 Pd 在零交越點與延遲馬達電氣角 30 度時變 化。以此類推,就可以利用 Cp 與 Cn 兩個計數器交替動作來實現 150 度 12 步方 波驅動的相位移器。
3.3
閉
閉
閉迴
迴
迴路
路
路速
速
速度
度
度控
控
控制
制
制
在能夠經由擷取適當的換相訊號使馬達以無感測開迴路方式運轉之後,以下 將逐步介紹如何實現閉迴路速度控制部份,其主要分為脈波寬度調變技術、零交 越點偵測法、PI 控制器與反積分過飽和控制器。3.3.1
脈
脈
脈波
波
波寬
寬
寬度
度
度調
調
調變
變
變產
產
產生
生
生器
器
器
脈波寬度調變 (Pulse Width Modulation, PWM) 技術主要是將一三角載波與
一控制命令訊號作一相減比較後輸出,其操作原理如圖 3.5所示,其中 Vtri 為三 角載波; ˆVtri 為三角載波之振幅;Vcontrol 為控制命令訊號;VP W M 為 PWM 輸出 電壓;VDD 為電壓源電壓;Vavg 為輸出平均電壓。當控制命令值大於等於載波值 時,比較後輸出高準位電壓源電壓 VDD;當控制命令值小於載波值時,比較後輸 出低準位零電壓,其數學表示式如下: Vo = ( VDD (Vcontrol ≥ Vtri) 0 (Vcontrol < Vtri) (3.1) 在一個三角載波週期 Ts 內比較產生低準位輸出的時間定義為 tof f;而產生高 準位輸出的時間定義為 ton,藉此可再定義 PWM 訊號的責任週期 D 為: D = ton Ts (3.2) 輸出電壓的平均值為 Vavg = ton Ts ∗ VDD = D ∗ VDD (3.3) 依三角形相似定理可推得下列關係式
Vcontrol ˆ Vtri = ton Ts = D (3.4) 由 式 (3.3) 可 知 輸 出 平 均 電 壓 Vavg 與 責 任 週 期 D 成 正 比 , 當 D 越 大 時,Vavg 也會越大;反之則越小。由式 (3.4) 可知,在三角載波頻率與振幅固定 的情況下,加大或減小控制命令訊號即可改變責任週期,進而達到調變輸出平均 電壓的效果,實現脈波寬度調變技術。 圖 3.5: 脈波寬度調變技術操作原理 圖 3.6為馬達外部驅動電路示意圖,其中 u、v、w 為馬達三相;VDD 為電壓 源;GND 為接地;Tr1、Tr3、Tr5 為上橋電晶體開關;Tr2、Tr4、Tr6 為下橋電晶 體開關。當實現脈波寬度調變技術後,將其訊號輸入適當電晶體開關中,便可以 達到控制馬達平均電壓的目的,由於馬達平均電壓與轉速成一正比關係,所以進 而可藉此實現速度控制。有關 PWM 的輸入控制電晶體開關有許多不同的方法, 例如只控制輸入上橋電晶體;控制輸入下橋電晶體;輪流控制輸入上下橋電晶體 與同時輸入控制上下橋電晶體,而本文所用之方法為只單獨輸入控制上橋電晶 體。
圖 3.6: 馬達外部驅動電路示意圖
3.3.2
零
零
零交
交
交越
越
越點
點
點之
之
之偵
偵
偵測
測
測
本文所使用之無感測驅動方法主要是利用馬達感應電動勢特性,將三相電壓 與中心相電壓做比較而得出零交越訊號,得到零交越訊號後再進一步使用,相位 移器而獲得換相訊號。在馬達以開迴路狀態全速運轉時,零交越點的訊號並不會 受到雜訊所干擾,所以容易辨識;但當馬達進行電流與轉速回授,以 PWM 實現 閉迴路控制時,輸入在馬達上橋的 PWM 訊號將會對零交越點之偵測造成干擾, 而不易辨識出零交越點真實發生的位置,如圖 3.7所示,其中 Vu 為馬達 u 相相電 壓;Zd 為零交越訊號;θe 為電器角角度。 圖 3.7: PWM 干擾示意圖 為了克服 PWM 訊號切換對零交越訊號造成的影響,在此利用相位移器來預 測零交越點發生的時間點,當零交越即將發生的前一段時間,就將 PWM 模式 切換為線性模式 (PWM責任週期為 1),而一偵測到零交越點時,便再將線性模 式切換回 PWM 模式,如此一來即可不受 PWM 訊號干擾而準確地偵測各個零 交越點,進而以無感測技術驅動馬達,如圖 3.8所示,其中 Vu 為馬達 u 相相電 壓;Ms 為選擇模式訊號,高準位時為線性模式、低準位時為 PWM 模式;Zd 為 零交越訊號;θe 為電器角角度。圖 3.8: PWM 模式與線性模式切換示意圖 [線線線性性性調調調變變變法法法] 經由線性模式與 PWM 模式的適當切換後,可以確實達到零交越點偵測不 受 PWM 訊號干擾,換相點可準確地被相位移器所估測,馬達得以以無感測的方 式正常驅動,但此種模式的相互切換法會對馬達速度控制的可控範圍造成限制, 因為馬達平均電壓與轉速成一正比關係,當轉速命令很小,使 PWM 責任週期 降為零時,平均電壓因為線性區域的影響,會使其維持在某一固定值以上,相 對地轉速會有一底限,其示意圖如圖 3.9所示,其中 ωc 為轉速控制命令;Vu 為 馬達某相相電壓;Ms 維模式選擇訊號,高準位為線性模式,低準位為 PWM 模 式;Vavg 為馬達平均電壓;ωr 為馬達實際轉速。 圖 3.9: 線性模式限制可控轉速示意圖
以下將針對圖 3.9的各別四個轉速命令部份作說明: 當 轉速命令為 wc1 時,PWM 責任週期為 100%,實際轉速 wr1 可 達 到 與 wc1 相同;當轉速命令為 wc2 時,PWM 責任週期落在 0% 至 100% 之中, 實際轉速 wr2 可透過 PWM 使平均電壓下降而達到與 wc2 相同;當轉速命令 為 wc3 時,PWM 責任週期降為 0% ,實際轉速 wr3 可降低至與 wc3 相同,同 時也為可控的底限轉速;當轉速命令為 wc4 時,PWM責任週期雖已降至 0% , 但因為線性區域的存在,使馬達平均轉速無法再下降,實際轉速 wr4 無法降至 與 wc4 相同,而限制了馬達的可控速度範圍。 由上述說明可知,固定電器角時間的線性區域雖然可以免除 PWM 訊號對零 交越訊號所產生的干擾,但同時也限制了馬達的可控速度範圍,尤其是在低速部 份,因此,為了實現低轉速可控,在此將使用線性調變法以適當地調變線性區域 的寬度,達成馬達低轉速運轉的目的。 由於轉速與零交越訊號頻率成正比,在一段固定時間裡,如圖 3.10所示,當 馬達以高轉速運轉時,零交越訊號為一高頻訊號,其高低準位轉換的週期非常短 暫,於是需要設定線性區域為一段較長的電器角時間,以順利偵測正確的零交越 點;而當馬達以較低轉速運轉時,零交越訊號為一低頻訊號,其高低準位轉換的 週期較長,於是設定線性區域的電器角寬度便可以較窄,就可以順利地偵測正確 的零交越點,產生延遲 30 度的換相訊號,讓馬達正常換相而驅動。 圖 3.10: 線性調變線性區域示意圖
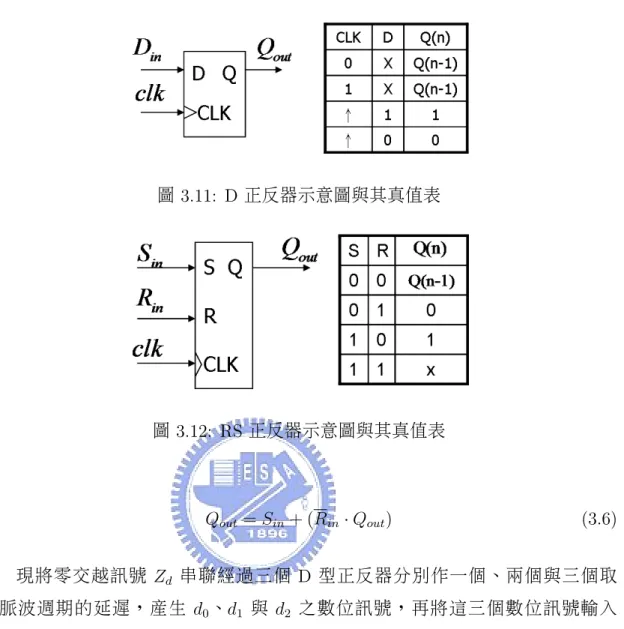
圖 3.10顯示當 PWM 責任週期已為 0% ,而轉速命令 wc 仍持續下降時,線 性區域寬度隨實際轉速 wr 作一線性調變,透過實驗的方法,可以歸納出其依據 的線性調變方程如式 (3.5) 所示,其中 θZC 為線性區域電氣角寬度;ωM 為在線性 區域寬度為 15 度電氣角時馬達可達到的最大轉速;ωm 為在線性區域寬度為 1 度 電氣角時馬達可降至的最低轉速;ω 為回授之實際轉速。 θZC = 1◦+ 15◦− 1◦ ωM − ωm (ω − ωm) (3.5) 藉由回授實際轉速與線性調變方程式 (3.5) 可得目前轉速所需設定之線性區 域電氣角寬度,進而達到增加馬達可控區域的目的。 [數數數位位位濾濾濾波波波法法法] 除了線性調變法能使可控轉速降低之外,在此再介紹另一種方法:數位濾波 法,其同樣能夠讓可控速度範圍增大,達到降低轉速的效果。由於 PWM 訊號責 任週期由 0% 至 100% 對零交越訊號產生之脈波雜訊干擾有一頻率範圍,而本文 是利用 VHDL 硬體描述語言作一數位控制,因此可藉由撰寫一數位濾波器來達到 濾除零交越訊號雜訊之功效。 圖 3.11與 3.12分別為 D 正反器與 RS 正反器的示意圖及其真值表,D 正反 器的功能為:當取樣時脈為正緣觸發時偵測 Din 準位,而 Qout 輸出與 Din 相 同,其他時刻當取樣時脈為高準位、低準位或負緣觸發時,Qout(n) 輸出維持在 與上一個時刻的 Qout(n − 1) 值相同,其整體同等於延遲一個取樣時脈週期的延 遲器。RS 正反器的功能為:當 R、S 皆為低準位時,目前輸出 Q(n) 維持與上個 時刻之輸出值 Q(n − 1) 相同;當 R 為高準位、S 為低準位時,輸出為低準位; 當 R 為低準位、S 為高準位時,輸出為高準位,其布林表示式如式 (3.6) 所示。
圖 3.11: D 正反器示意圖與其真值表 圖 3.12: RS 正反器示意圖與其真值表 Qout = Sin+ (Rin· Qout) (3.6) 現將零交越訊號 Zd 串聯經過三個 D 型正反器分別作一個、兩個與三個取 樣脈波週期的延遲,產生 d0、d1 與 d2 之數位訊號,再將這三個數位訊號輸入 一 AND 閘與一 NOR 閘,之後輸入 RS 正反器,便可得一個基本的數位濾波器, 如圖 3.13所示。 圖 3.13: 數位濾波器架構圖
由式 (3.6) 可推導此數位濾波器之布林函數為: Zdf = (d0· d1· d2) + ((d0+ d1+ d2) · Zdf) (3.7) 其中設置 AND 閘之目的為:當 d0、d1與d2 三個訊號皆為高準位時,則設 定 S 為高準位;設置 NOR 閘之目的為:當 d0、d1、d2 三個訊號皆為低準位時, 則設定 R 為高準位。而當 S 為高準位時,R 必為低準位,輸出則為高準位; 當 S 為低準位時,R 必為高準位,輸出則為低準位,也就是說,當 d0、d1、d2 皆 為高準位時,輸出便判斷為高準位;d0、d1、d2 皆為低準位時,輸出便判斷為低 準位,藉此選擇適當地取樣脈波頻率便可以達到對零交越訊號濾除雜訊的功效。
3.3.3
轉
轉
轉速
速
速
與
與
與電
電流
電
流
流 PI
控
控
控制
制
制器
器
器
本文所採用之閉迴路控制分為兩個層級:轉速閉迴路控制與電流閉迴路控 制,而兩者以串聯形式存在。閉迴路控制法是由感測電路感測回授訊號,並回傳 至 FPGA 晶片中與命令訊號相減後作一閉迴路控制,其中轉速控制之回授訊號是 利用無感測驅動中之換相訊號,適當轉換成轉速訊號,以便於回授至轉速控制器 中作控制;電流回授訊號則是將馬達電流經由電阻轉換為電壓訊號,再經類比電 路與 AD 處理回授至 FPGA 中的電流控制器。 [速速速度度度回回回授授授處處處理理理] 在進行無感測驅動時,利用換相訊號 Pd可以產生轉速訊號 F G,其中 F G 週 期 TF G 設定為 Pd 之三倍,意即當 Pd週期同等於 120 度電氣角時間時,TF G 之週 期為 360 度電氣角時間。因實驗所採用之馬達為 9 槽 12 極,由式 (3.8):馬達電 氣角 θe、機械角 θm 與極數 P 之關係可進而算得馬達之轉速 ωr (RPM)與 TF G 之 關係,如式 (3.9) 所示。 θe = P 2θm (3.8)ωr = 60 P 2 × TF G = 10 TF G (3.9) 現利用週期為 Tclk 的取樣時脈計數 k 個 F G 週期的時間,可得計數值 N 為 TF G= Tclk× N k (3.10) 再將其代入式 (3.9) 可得 ωr = 10 × k Tclk× N (3.11) 為了使計算出之轉速值能較平均與精確至個位數,在此選擇 Tclk為 2.56 µs、k 為 10, 也就是一次計數 10 個 F G 訊號週期再輸出轉速,代入式 (3.11) 可得 ωr = 39062500 N (3.12) 所以經由推導出式 (3.12) 後,可在 FPGA 中計算馬達實際轉速值,並回授至轉速 控制器中做處理。 [電電電流流流回回回授授授處處處理理理] 圖 3.14為電流回授處理之流程圖。首先經由電流感測器感測馬達中的電流, 其次透過串接於六橋驅動電路與地之間的 0.25 Ω 小電阻將其轉為電壓值,因為電 流範圍為 0~0.5 安培,所以轉為電壓後為 0~0.125 伏特,接著再藉比例放大器 放大 80 倍電壓,使其範圍落於 0~10 伏特之間以符合 AD 轉換器的輸入範圍, 輸入 AD 之前再經一低通濾波器,濾除 25KHz 以上之高頻雜訊,最後 AD 轉換 器以 20 µs 的轉換時間將類比電壓轉換為 12 位元的數位訊號並輸入 FPGA 中之 電流回授控制器做處理。
圖 3.14: 電流回授處理流程圖 [PI控控控制制制器器器]
本論文提出控制三相無刷直流馬達速度之架構主要是藉由串聯兩個比例積分 控制器 (porportional and integrated controller, PI controller) 所達成,如圖 3.15所
示:馬達轉速命令 ωc 與回授轉速 ωr 相減後輸入轉速 PI 控制器做處理,而後產 生電流命令 ic,而其再與回授電流相減後輸入電流 PI 控制器,再者輸出電壓命 令 vc 以調整 PWM 的責任週期,進而達到控制馬達平均電壓與轉速的目的。 圖 3.15: 轉速與電流控制器方塊圖 由 PI 控制器的輸出函數 U(z) 與誤差輸入函數 E(z) 之比值可求出其在數位 系統中之轉移函數 G(z) 為 G(z) = U (z) E(z) = Kp+ Ki 1 − z−1 (3.13) 其中 Kp 為比例常數;Ki 為積分常數 將式 (3.13) 乘開之後各別分為比例控制部份與積分控制部分之差分方程式表 示可得 up(k) = Kpe(k) (3.14)
ui(k) = ui(k − 1) + Kie(k) (3.15)
式 (3.14) 與式 (3.15) 相加後可得 PI 控制器之差分方程式,如式 (3.16) 所示,而
經由式 (3.16)可將 PI 控制器於 FPGA 中實現。
u(k) = up(k) + ui(k) = Kpe(k) + ui(k − 1) + Kie(k) (3.16)
其中 u(k) 為第 k 個取樣時間的輸出訊號;up(k) 為第 k 取樣時間的比例控制 輸出訊號;ui(k)為第 k 個取樣時間的積分控制輸出訊號; ui(k − 1)為第 k − 1 個 取樣時間的積分控制輸出訊號;e(k) 為第 k 個取樣時間的誤差訊號。 圖 3.16為 PI 控制器方塊圖,其主要是將比例控制與積分控制先各自處理後 再加總起來作整合輸出的動作;z−1 方塊代表延遲一次積分控制輸出的功能,可 用圖 3.11之 D 型正反器實現;另外在積分累加後與整體輸出前各設置有一個輸出 飽和限制方塊,其功能在於防止累加數值太過龐大而導致晶片內部運算溢位,因 此若當運算值超出其上下限時,就以臨界邊界值輸出。 圖 3.16: PI 控制器方塊圖
3.3.4
反
反
反積
積
積
分
分
分過
過
過
飽和
飽
飽
和
和控
控
控制
制
制器
器
器 [12]
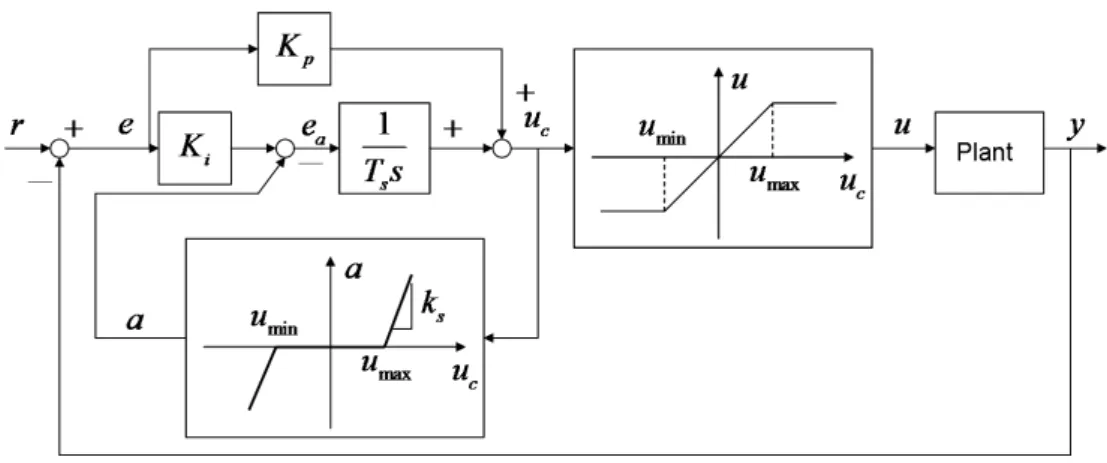
經由轉速與電流 PI 控制器串聯後可確實完成馬達速度控制的目的,但實驗 所顯現出的響應趨勢不甚理想,在達到穩態後仍會產生時大時小的波動狀穩態 誤差,其類似積分過飽和現象,所以在此使用一反積分過飽和控制器並聯於電 流 PI 控制器旁,以使馬達之速度響應更為良好。在大多數的電機系統中,因為致動器 (actuator) 實際動態輸出有其上限值, 所以有時會達到飽和狀態,例如馬達不能產生無限大的轉矩,而是有一個極大 值,當控制系統中的受控體動態輸出已達到最大但系統輸出仍無法達到與輸入命 令相同而有穩態誤差時,此時積分器會不斷累積誤差量,並在下一次輸出時以超 越量 (overshoot) 的形式在系統總輸出響應中顯現出來 [12],此種現象稱為積分過 飽和 (integrator windup)。 考慮圖 3.17的回授控制系統,以便對積分過飽和現象作一較詳細之敘述:假 設現在有一較大的參考命令r輸入此回授系統,使得經 PI 控制器後的控制輸入訊 號 uc 大於 umax,輸入訊號 u 維持在飽和狀態,在此情況下,積分控制器中的 積分器便會持續累加誤差而使得 uc 不斷增大,但由於輸入受控體 (plant) 的訊 號 u 仍維持不變,也就是 u = umax,所以使得誤差量值 e 依舊非常大,因為輸入 訊號 u 是維持不變的,所以增大 uc 並不會達到原本應有的功效(使誤差減小),在 此情況下,如果飽和的情形持續一段時間,積分器的累加的輸出可能會變得非常 大,而產生一個可觀的負誤差訊號 e [12],使訊號 uc 的絕對值減小,讓訊號 u 由 飽和狀態輸出掉回正常寬帶輸出。 圖 3.17: 回授系統方塊圖 要克服系統發生積分過飽和的現象,則必須加入反積分過飽和控制器
(inte-grator antiwindup controller),如圖 3.18所示,其可以在致動器發生飽和現象時立
即啟動,將誤差訊號 ea 減低,進而同樣使訊號 uc 減小,讓訊號 u 維持在線性區
圖 3.18: 加入反積分過飽和控制器之回授系統方塊圖 為了使反積分過飽和控制器能確實作用,其中的斜率 ks 必須設定在足夠大的 值以上,以便即時地將系統從飽和狀態中拉回。在本文中使用圖 3.19之方式去實 現一個反積分過飽和控制器,其架構與圖 3.18完全相同,只是較易理解與實現於 一個數位系統中。 圖 3.19: 反積分過飽和控制器之實現方式
在本論文中使用 Altera 公司的 Cyclone 2 FPGA 晶片實現一套無感測控制的 系統,其主要操作流程與架構是先在 Quartus II 軟體中將各演算法模組式地寫成 硬體描述語言 (VHDL),最後將其總合成一個 .sof (SRAM Object File) 檔案,以 便透過 JTAG (Joint Test Action Group) 傳輸下載至 FPGA 發展版中,接著再經 由 FPGA 發展版將各種訊號輸出至外部的六橋驅動電路,以驅動一個三相無刷直 流馬達。
4.1
無
無
無感
感
感測
測
測
驅
驅
驅動
動
動各
各
各功
功
功能
能
能模
模
模組
組
組規
規
規劃
劃
劃與
與
與模
模
模擬
擬
擬
圖 4.1表示一顆擁有 150 度無感測驅動技術的 FPGA 晶片的內部系統架構, 利用 VHDL 在晶片中完成各模組之功能,接著使用 Quartus II 整合所有模組並燒 錄於 ALTERA DE1 發展版上,搭配外部電壓電流感測電路與六橋驅動電路,即 可完成一套無感測驅動系統架構,以下將逐一說明各個模組及驗證其功能性。 圖 4.1: 無感測驅動晶片系統架構方塊圖4.1.1
開
開
開關
關
關控
控
控制
制
制模
模
模組
組
組
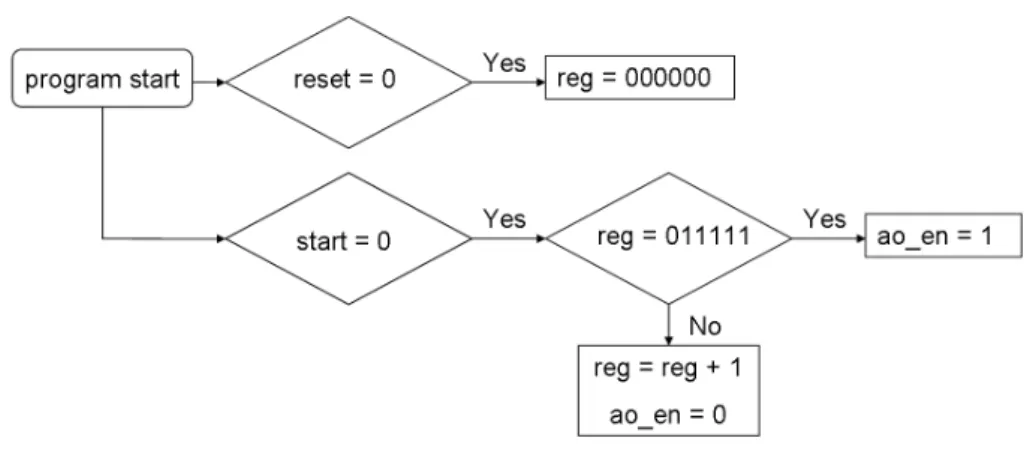
開關控制模組,如圖 4.2所示,是利用 DE1 發展版上的 KEY3 與 KEY2 兩 個按鈕來分別控制 start 與 reset 訊號,其定義如表 4.1所示。 圖 4.2: 開關控制模組 表 4.1: 開關控制模組各訊號定義 腳位名稱 屬性 位元數 (bit) 訊號定義 clk INPUT 1 模組時脈 (50MHz) start INPUT 1 啟動開關 reset INPUT 1 重新啟動開關 ao en OUTPUT 1 定位與開迴路模組致能訊號 當開關控制時脈 clk 正緣觸發時便開始進行開關控制模組,如圖 4.3所示,此 時偵測 start 及 reset 訊號狀態,若 start 為低準位(代表按下 KEY3 按鈕),則內
部計數器 reg 開始計數,當 reg 從 000000 計數至 011111,也就是按住 KEY3 按
鈕持續 31×20ns =620ns 時,使定位與開迴路模組致能訊號 ao en 轉為高準位, 以便使定位與開迴路模組開始啟動;若 reset 為低準位(代表按下 KEY2 按鈕), 則將 reg 歸零,以便重新啟動整個系統。
圖 4.3: 開關控制模組流程圖 圖 4.4為開關控制模組的模擬結果,可看出當 start 為低準位時,ao en 轉為 高準位,代表定位與開迴路模組開始啟動;而當 start 和 reset 訊號同時為低準位 時,ao en 轉為低準位。 圖 4.4: 開關控制模組模擬結果
4.1.2
定
定
定位
位
位與
與
與開
開迴
開
迴
迴路
路
路
模
模
模組
組
組
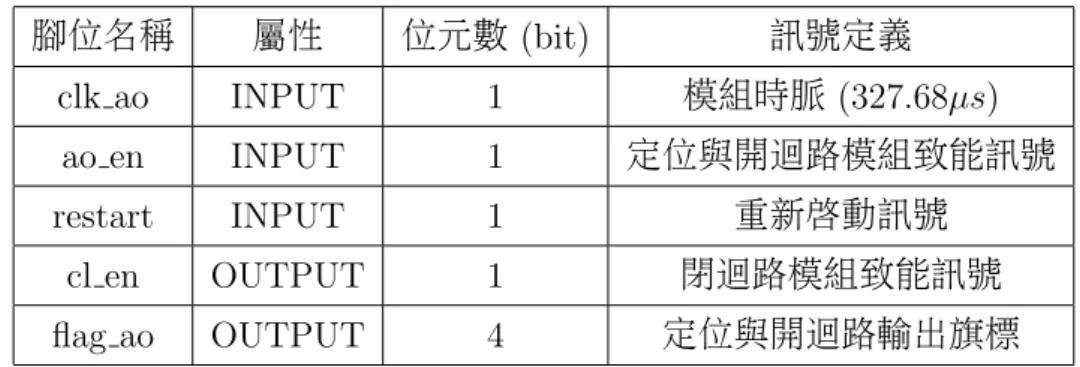
圖 4.5顯示定位與開迴路模組方塊圖,此模組主要是在初始馬達轉子與定子 相互位置未知時,對其進行定位的動作,以便得知其位置,當確定轉子位置後, 方能進行接下來的閉迴路十二步方波驅動。 圖 4.5: 定位與開迴路模組表 4.2: 定位與開迴路模組各訊號定義 腳位名稱 屬性 位元數 (bit) 訊號定義 clk ao INPUT 1 模組時脈 (327.68µs) ao en INPUT 1 定位與開迴路模組致能訊號 restart INPUT 1 重新啟動訊號 cl en OUTPUT 1 閉迴路模組致能訊號 flag ao OUTPUT 4 定位與開迴路輸出旗標 表 4.2定義了此模組中的各個訊號,當 clk ao 正緣觸發時便偵測 restart 訊 號:其為低準位時對模組作一初始化動作,包括將內部計數器歸零、定位與開迴 路輸出旗標 flag ao 設定為 0110 (代表控制外部六橋開關皆為關閉狀態)與閉迴路模 組致能訊號 cl en 維持在低準位; restart 為高準位時,偵測 ao en 訊號的準位, 當其為高準位時,表示開始啟動定位程序,使馬達電流依序導通 u→v (flag ao
=0100)、v→w (flag ao=0000) 及 v→u (flag ao=0001) 方向,透過實驗測試,其導
通時間分別約為 0.7s、38ms 與 15ms,即可完成三步激磁定位,接著將 cl en 訊
號設定為高準位,使閉迴路模組開始運作;若偵測 ao en 訊號準位為低準位,則
持續設定 flag ao=0110,保持六橋開關為關閉狀態,如圖 4.6所示。
由 於 若使用週期為 327.68µs 之時脈來模擬此模組會造成 Quartus II 模 擬 時間 太 長 , 於 是 在 此 使 用 週 期 為 20ns 之 時 脈 來 驗 證 其 功 能 , 因 為 取 樣 時脈 減 小 了 214 倍 , 所 以 上 述 三 個 實 際 導 通 時 間 應 也 會 減 小 214 倍 , 而 約 為 42.72µs、2.32µs 及 0.92µs。由圖 4.7與圖 4.8(為圖 4.7的局部放大)的模擬結果 可得在 ao en 為高準位而 restart 為低準位時,flag ao 開始進行 0100、0000 和 0001 三 步換相,當三步換相結束後,cl en 轉為高準位,代表閉迴路模組致能,由圖中 可 得 三步換相時間確實約為 42.72µs、2.32µs 及 0.92µs;而 restart 為高準位 時,flag ao 恢復為 0110、cl en 掉回低準位。 圖 4.7: 定位與開迴路模組模擬結果之一 圖 4.8: 定位與開迴路模組模擬結果之二
4.1.3
閉
閉
閉迴
迴
迴路
路
路
模
模
模組
組
組
此模組串聯在定位與開迴路模組之後,主要功能在執行 150 度十二步方波驅 動,模組方塊圖如圖 4.9所示;各訊號定義如表 4.3所示。 圖 4.9: 閉迴路模組表 4.3: 閉迴路模組各訊號定義 腳位名稱 屬性 位元數 (bit) 訊號定義 clk cl INPUT 1 模組時脈 (0.64µs) cl en INPUT 1 閉迴路模組致能訊號 restart INPUT 1 重新啟動訊號 zdf INPUT 1 濾波後的零交越訊號 t1~6 low INPUT 15 線性區電氣角時間計數值 flag cl OUTPUT 4 閉迴路輸出旗標 FG c OUTPUT 1 轉速產生訊號
dead out OUTPUT 1 線性區判別訊號
t1~6 out OUTPUT 15 60 度電氣角時間計數值 如圖 4.10所示,當 clk cl 正緣觸發時便偵測 restart 訊號之準位,當其為高 準位時,將模組內所有參數初始化;當其為低準位時,再判斷若 cl en 訊號為高 準位,則開始進行 150 度十二步方波驅動,其驅動方法與換相時機在 3.2 節有 詳細的說明:依據濾波後的零交越訊號 zdf 與數位式相位移器便可達到目的, 並適當地輸出閉迴路輸出旗標訊號 flag cl,以控制外部六橋開關;另外一併輸 出轉速產生訊號 FG c,經由計算此訊號週期,再乘以一定值便可得到馬達的 轉速(見 4.2.9 轉速計算模組);dead out 訊號為線性區判斷訊號,當其為高準位 時 PWM 訊號輸入三相端電壓;為低準位時 PWM 訊號停止輸入三相端電壓,以 便偵測正確的零交越點;t1 out 到 t6 out 訊號分別為六個模組內部計數器,其計 算 60 度電器角時間的計數值以傳至線性調變模組,線性調變模組依據轉速輸出
適當的 t1 low 到 t6 low 訊號,控制 dead out 高低準位時間,以調變線性區域的
圖 4.10: 閉迴路模組流程圖 圖 4.11為模擬閉迴路模組所產生之結果,在 restart 為低準位與 cl en 為高 準位時,代表 150 度十二步驅動正在運行,在此輸入一固定頻率的零交越訊 號 zdf 作為依據,而其高低準位時間各佔 60 度電氣角時間,可從圖中得出換相旗 標每 30 度電氣角時間便變更一次,在 360 度電氣角時間內總共轉換十二次,且 轉換順序與表 3.1相同,代表此模組確實執行 150 度十二步方波驅動。另外,在此 設定線性區域電氣角時間為 15 度,因此可看出在零交越點發生前的 15 度電氣角 時間,dead out 為低準位,使 PWM 訊號暫停輸入三相端電壓,以便偵測正確的 零交越點,當一偵測到零交越點,也就是 zdf 高低準位變換的瞬間,dead out 便 恢復為高準位,使 PWM 重新注入三相端電壓。最後,可得 FG c 訊號每六步的 時間切換一次準位,當馬達速度增快時,每步切換的時間會減少,因此 FG c 的 頻率會變大;反之,當馬達的速度降低時,FG c 的頻率會變小,兩者成一正比 關係,所以可依據其頻率來計算馬達目前的速度,圖 4.12顯示在模擬後半段時間 將 zdf 頻率增快,可得 FG c 頻率也跟著增快。 圖 4.11: 閉迴路模組模擬結果之一 圖 4.12: 閉迴路模組模擬結果之二
4.1.4
線
線
線性
性
性調
調
調變
變
變模
模
模組
組
組
此模組與閉迴路模組相互並聯,當閉迴路模組致能時,其便從不斷地從閉迴 路模組中讀取數值,並輸入本身,透過內嵌的線性方程式計算而後得出正確的線 性區寬度設定,最後再將訊號回送給閉迴路模組,完成整體線性調變的功能。 圖 4.13: 線性調變模組 表 4.4定義線性調變模組內的各種訊號,其模組工作流程如圖 4.14所示,首 先當模組時脈 clk lm 正緣觸發時,便讀取回授轉速數值 fb w 進入模組內,接著 透過模組內嵌的線性方程式,依據 fb w 而得到目前轉速下適當的線性區域電氣角度 probe t,再來利用 probe t 依據 60 度電氣角時間計數值 t1~t6 out 計算應該
回送多大的暫存器數值 t1~t6 low 給閉迴路模組作使用。 表 4.4: 線性調變模組各訊號定義 腳位名稱 屬性 位元數 (bit) 訊號定義 clk lm INPUT 1 模組時脈 (50MHz) fb w INPUT 14 回授轉速 (rpm) t1~t6 out INPUT 15 60 度電氣角時間計數值 t1~6 low OUTPUT 15 線性區電氣角時間計數值 probe t OUTPUT 15 實際線性區電氣角度
圖 4.14: 線性調變模組流程圖 圖 4.15為線性調變模組的模擬結果,在此設定回授轉速為 2048 RPM,而 由閉迴路模組送出 t1~t6 out 的計數器值為 1024,代表在此轉速下 60 度的 電氣角時間內,計數器計數了 1024 次。probe t 所顯示之值為 6,代表此轉速 下線性區電氣角應為 6 度,而因為 60 度電氣角度所代表的計數值為 1024, 則 6 度電氣角度所代表的計數值應為 102,由模擬結果可以得知,輸出的計數 值 t1~6 low 為 104,與理想結果差不多,在模組時脈為 0.02ns 的情況下,誤差 僅有 0.04ns,而產生此誤差的原因在於 FPGA 為數位晶片,所以計算角度的解 析度最低只能降到 1 度;圖 4.16顯示轉速為 512 RPM 下所模擬的結果,可以看 出 probe t 為 2 度電氣角,輸出的計數值 t1~6 low 為 36,與理想值 34 同樣也只 誤差兩次計數值。 圖 4.15: 線性調變模組模擬結果之一 圖 4.16: 線性調變模組模擬結果之二
![圖 3.8: PWM 模式與線性模式切換示意圖 [線線 線性性 性調調 調變變 變法法 法] 經 由線性模式與 PWM 模式的適當切換後,可以確實達到零交越點偵測不 受 PWM 訊號干擾,換相點可準確地被相位移器所估測,馬達得以以無感測的方 式正常驅動,但此種模式的相互切換法會對馬達速度控制的可控範圍造成限制, 因 為馬達平均電壓與轉速成一正比關係,當轉速命令很小,使 PWM 責任週期 降為零時,平均電壓因為線性區域的影響,會使其維持在某一固定值以上,相 對 地轉速會有一底限,其示意圖如圖 3.9所示,其中](https://thumb-ap.123doks.com/thumbv2/9libinfo/8464235.183298/39.892.192.786.150.322/性調調度控可控範圍造成限制因為馬達平成一正比關有一底限其.webp)
![圖 3.14: 電流回授處理流程圖 [PI 控控 控制制 制器器 器]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8464235.183298/45.892.189.791.157.233/圖314電流回授處理流程圖PI控控控制制制器器器.webp)