Robust adaptive array beamforming with random
error
in
cycle frequency
Y .-T.Lee and J.-H.Lee
Abstract: By exploiting the cyclostationary properties, the SCORE algorithms presented by Agee
et al. (1990) havc been shown to bc effective in performing adaptive beamforming without rcquiring the direction vector of the desired signal. However, these algorithms suffer from severe performance degradation in the presence of a random error in cycle frequency. The authors first establish a statistical model of the cyclic correlation matrix when the random error exists. According to this statistical model, two robust methods based on the SCORE algorithms are developed to achieve robust adaptive beamforming against random error. Analytical formulas are then derived for evaluating the performance of the proposed methods. Several simulation examples are also presented for confirming the theoretical analysis and showing the effectiveness of the proposed methods.
1 Introduction
Cyclostationarity [ 11, which is a statistical property ex- hibited by most man-made communication signals, corre- sponds to the underlying periodicity arising from carricr frequcncies or baud rates. Recently, a class of spectral self- coherence restoral (SCORE) algorithms has been presented in [2] to deal with blind adaptive beamforming for cyclo- stationary signals. However, these algorithms suffer from server performance degradation in the presence of cycle frequency error (CFE). Some previous work on thc problem has been reported in [4-81. A statistical analysis presented in [4, 51 shows the cycle leakage through a sinc function due to finite data. On the other hand, two approaches, namely multi-cyclic MUSIC and adaptive-cc cyclic MUSIC, have been presented in [6] to deal with performance degradation due to CFE. However, they cannot tackle the problem efficiently. Variations of the adaptive-cc cyclic MUSIC are explored in [7]. Based on the concept of subintervals, only the cyclic correlation matrices of subintervals are required to reduce the memory requirements and the sensitivity of cyclic MUSIC to CFE. Recently, an efficient technique for coping with the problem of nonrandom CFE in cyclo- stationarity-exploiting adaptive array beamforming was developed [ 81. Robust adaptive beamforming is achieved by appropriately estimating the actual cycle frequency.
In this paper, two of the SCORE algorithms presented in [2], namely the least-square SCORE (LS-SCORE) and cross-SCORE algorithms, are considered in the presence of random CFE. Based on the central limit theorem, the cyclic correlation matrix with random CFE is equivalent to
0 IEE, 2001
IEE Piweedings online no. 20010425 DUI: 10.1049/ip-rsn:200 10425
Paper first received 21st Februdiy 2000 and in final revised fomi 19th March 2001
The authors are with the Department of Electrical Engineering, Building 2, Nationdl Taiwan University, Taipei 106. Taiwan, Republic of China IEE Pror.-Roclni: Sonar Nuvig,, Pbl. 148, No. 4, Airgist 20Ul
the cyclic correlation matrix computed by using the actual cycle frequency plus a Gaussian random error matrix when the random CFE is an independent sequence. By making use of the ideas originally developed in [9], where two approaches for curing the performance degradation of conventional adaptive beamforming with random steering vector error were presented, two methods based on the LS-SCORE and cross-SCORE algorithms are developed to alleviate the performance degradation due to random CFE. Then, analytic formulas arc derived for evaluating the performance of the proposed methods.
2 Adaptive beamforming using cyclostationarity 2.7 Signal cyclostationarity
For a signal s(t), the cyclic correlation function and conjugate cyclic correlation function are defined as the following infinite-time averages:
and
Ys;.,*cf, 'C) (s(t
+
T / 2 ) S ( t - T / 2 ) d 2 " ) , (2) respectively, where the superscript '*' denotes the complex conjugate. s(t) is then said to be cyclostationary if vss(J 7)or u,,.(.f; T ) does not equal zero at some time delay z and cycle frequency (CF) J'# 0. Let x(t) denote the data vector received by an array. The cyclic correlation matrix and conjugate cyclic correlation matrix are defined by
R , ( f , T ) = (X(t 4- ' C / 2 ) X " ( t - T/2)e-j2"i), (3) and
respectively, where the superscript ' H ' denotes the conju- gate transpose and ' T ' the transpose.
2.2 SCORE algorithms
Consider an M-clement array excited by a SO1 (signal of interest), J interferers, and spatially white noise. The received array data vector x ( t ) is then given by
J
x(t) = s(t)ad
+
C
!j(t)aj+
n ( t ) = s(t)ad+
i(t) ( 5 )where s(t) and si(t) denote the waveforms of SO1 and the jth interferer, ad and aj are the direction vectors of the SOT
and the jth interferer, respectively, and n(t) is the noise vector. The array output is then given by y(f) = w"x(t), wherc w denotcs the weight vector.
Assume that s(t) is cyclostationary and has a CF equal to
E , but i(t) includes all signals not of interest (SNOIs) and noise and is temporally uncorrelated with s(t). Based on the LS-SCORE algorithm of [2], a cost function is defined as follows:
.j= I
Fl.,(W c ) =
(IA4
- r(t)I2)1. (6) where the reference signal v ( t ) is given by v(t) = c"x(t ~ z)ejZnaf and ( . ) T denotes the average overthe time interval [0, r ] . c is a control vector and is fixed for the LS-SCORE algorithm. The optimal weight vector w I minimising eqn. 6 is given by
where RA, = ( x ( t ) d ' ( t ) ) , and ?Ja) = ( ~ ( t ) r * ( t ) ) ~ are the sample autocorrelation matrix of x ( t ) and the cross- correlation vector of x ( t ) and r(t) computed over [0, T ] , respectively,
To improve the convergence speed of the LS-SCORE algorithm, the cross-SCORE algorithm is proposed by [2], based on maximising the correlation coefficient, which is given by
between y ( t ) and r ( f ) , where u(t) = x ( t - T)e/2nn' is the control signal. It is easy to show that the optimal weight and control vectors maximising eqn. 8 are the dominant eigenvectors of
respectively.
3 Proposed
methods
3. I Statistical model
Assume that
,/=
a+
Am,, , where ,/and a are the presumed CF and the actual CF, respectively, Aan reprcsents the random cycle frequency error (CFE) at the time instantnT,, and
r,
is the sampling interval. Substituting t=nT, into eqn. 3, we have the discrete-time version o f the cyclic correlation matrix as= R,,(a, 7)
+
R , ( f , 7) (10)where R,(f, z) represents the corresponding error matrix equal to lim,v+m ( 1 / N )
E''
n=l (e-'2nAa,JT~ - l)D,(n, 7 ) andD,(n,
z)
= x ( n ) f i ( n - z)e-'2ncmTh is independent o f A y n ,Let { A a n , n = I , 2 , . . . } be an independent random
I94
sequence; the random sequence { ( e-J2nAvtli1T\ ~ I), n = 1 ,
2..
. . } is thus independent. Then, R , ( f; z) equals the sum of infinite independent random matrices and becomes a Gaussian random matrix according to the central limit theorem shown by ([IO], p. 15). As a result, we conclude that when CFE is an independent random sequence, the resulting cyclic correlation matrix is equal to the cyclic correlation matrix computed by using the actual CF plus a Gaussian random error matrix.3.2 Robust methods based on LS-SCORE algorithm
From eqn. 10, the weight vector shown by eqn. 7 can be expressed as
when Tapproaches infinity. Let R , ( . f ; T ) have zero mean. Then, the vector ar = RJJ z)c is a zero-mean Gaussian random vector since c is a fixed vector. Hence, the log- likelihood function corresponding to a, is given by
wherc C denotcs the covariance matrix of a?.
Accordingly, the role of a, in cqn. 1 1 can be viewcd as the resulting steering error vector due to the random CFE. Using the first method of
[9],
we define a cost function related to a, asJ ( a ) = aHRLJa
+
k(a - & ( , f . T ) c ) ~ ~ - ' ( u - R,yx(,f. T ) C ) (13) where the first term is the inverse of array output power corresponding to the constraint vector a,R,
is the ensemble autocorrelation matrix ofx(t), and kis apositivcparameter. We obtain the optimal a, and w I , for minimising eqn. 13 asand
Next, performing the cigendecomposition ofR,, we have I,,$, =
~f
are the eigenvalues of R , in descending order, G:is the variance of the noise, and e j , i = 1 , . . .
,
M
are the corresponding eigenvectors. The subspaces spanned byE, = { e l , . . .
,
eJ+I } and E, = {eJ-,z,
. . .,
e M } are calledthe signal subspace and noise subspace, respectively. Hence, R , can be rewritten as
R ,
=E::,
i i e i e y , where A ,2
. . .
>
AJ+, > i,,+2 = . ..
- -R,, = E,?A,E;
+
E , A , E t (16) wherc A, = diag{i, , . . . ,A J + I }
and A,, = r7i1. SinceR,(a, z)c = v,,(a, T ) ( U ; C ) U ~ lies in the signal subspace, we use the second method of [9] and define a cost function
J ( a ) = a"E,E:a
+
k(a - R&, T)c)HC-i(a - R , , ( f . T ) C ) as(17) The optimal a. and w12 minimising eqn. 17 can be easily
obtained as
(18)
a, =
(J
+
1 cE,,E;) - ' R x x ( , f ? z)cand
(19)
3.3 Robust methods based on cross-SCORE algorithm
Since R,,, = RXx(J ~)e-'"~' and R;: = R;', we obtain from
eqns. 9 and 10 that the weight vector w, of the original cross-SCORE algorithm equals thc dominant cigenvector of
when T approaches infinity. Substituting R,(a, T) = r,7,r(a, T)U,U; into eqn. 20 and performing some algebraic manipulations, we have
7 2
where a,, = R e ( f ; z)R,;'ad is a Gaussian random vector,
and ae2 = R , ( f , T)R&'RF(J; T ) W , is not a Gaussian random
vector due to the nonlinear operation of R,(J; T ) . Let the elements of R , ( f , T ) be independent idcntically distributed (i.i.d.) white Gaussian random variables with zero mean and variance oz. Then, eqn. 23 becomes a white Gaussian random vector. Assume that 0," is small enough. Thc term
of eqn. 24 is negligible in comparison with the other terms of cqns. 21,22 and 23. Accordingly, we can rewrite eqn. 20 as
where
is a zero-mean white Gaussian random vector. We observe from eqns. 11 and 25 that the weight vectors obtained by using the LS-SCORE and the cross-SCORE algorithms have the similar form in the presence of random CFE. Letting the covariance matrix of a, in eqn. 25 be C = cfZ,
we note from eqns. 15 and 19 that based on the cross- SCORE algorithm it is appropriate to set the optimal weight vector equal to the dominant eigenvector of
where
-1
(Rxx
+
$1) for the first methodI
for the second method4 Theoretical analysis
Here, wc evaluate the performance in terms of the array output signal-to-interference plus noise power ratio (SINR) for each of the methods proposed above. Consider an M- element uniform linear array (ULA) excited by a S o l , an interferer, and additive white Gaussian noise (AWGN). Substituting R,r.r(a, T ) = r.?,?(c(, ~ ) a , u y and C = a;Z into eqns. 15 and 19, we obtain that the optimal weight vector w l equals R;'R,(J; T ) C = pR;l(ad
+
( 1 / p ) R , ( , f ;T)C) for the proposed methods based on the LS-SCORE
algorithm, where p = r X 5 ( a , z)(a;'c) and R;' is given by
eqn. 27. In contrast, we have from eqns. 25 and 26 that
w, FX p&'{ ad
+
[y3/(y1+
y2)]uel } whcn using the cross-SCORE algorithm, whcre ,U = (y,
+
y 2 ) / A . Moreover, y l,
y 2and y3 are given by eqns. 21, 22 and 23, respectively, except that R;' is used instead of R.x;J. As a result, under the situation where the resulting steering error vector is white Gaussian, the optimal weight vector obtained by using the proposed methods developed based on cither the LS-SCORE or cross-SCORE algorithms has a general expression
where
I
adl2
= M, and ocae denotes the correspondingwhite Gaussian steering error vector with mean zero and covariance matrix oifL We note that ocae is given by
( l / p ) R e ( , f ; T ) C and [ y 3 / ( y 1 + ; ~ ~ ) ] a , , for the proposed
methods bascd on the LS-SCORE algorithm and cross- SCORE algorithm, respectively. Let o : , of, and 0: reprc-
sent the powers of SOI, interference and noise, respec- tively. From eqns. 16 and 27, we can rewrite R;' as
where
For deriving the output SINR for the proposed methods, we first rewrite a, = c,a,
+
c p ,+
E , E f a , . Due to the factthat u ~ E , E ~ u , = u f E , E f a e = 0, we have aya, = ML,
+
(a,HuJc, (30){
aya, = (+Z(,)L,+
Mc, and hcnce M a p l e - ( U J i U d ) f J ~ U ( , c, = M 2 - I Q y U dl2
(31) 195 IEE PToc-Radar, Sonar Nauig., Vol 148, No. 4, Augurt 2001Moreover, because aYR&'ad x 0, we have
ayE,A;'EFa,l 0 and ay{R,,
+
( a 2 / k ) g - ' a d x 0 when of/k is small enough. Therefore, ayE,A;'EFad x 0 for the first aFd second methods. Qn the other hand,ai'E,EfE,A;'Eyad = 0 and afE,,A;'E{a, = O due to
the orthogonality of E , and E,, . Accordingly, we have
1 0 -
8 -
6 -
where SNR = a:./: and INR = o2/oi. From eqn. 44 in the Appendix, the expectation of S d R l is approximately given by
E(SINR1)
M2<Y2E{l I
+
oPcq 12}SNRand the output power gain of SO1 is
Simila_ly, because a f E , E f E , i ; ' E y a j = 0 and
ai'E,,A;'Effai
=
0, the output power gain of interference can be expressed byMoreover, the output power gain of noise is given by
where RG2 = E , A , F ~ E ;
+
E,,A;'Ef and afE,7X,;2EFad=
c:afE,A;2E.:ad are obtained from eqns. 29 and 32, respectively.Next, we evaluate afE,s&pEfad and a ~ E s & " E ~ a j for p = 1 and 2 . Consider the case that there onlv exists a SO1 and background noise; -it is easy to show that
E, =en,, c( a d / l / M and A, =
Cs
=Ma:-+ of+
o:/k forthe first method. Hence, we have afEs,A,'Efad % M<Fp
for the first method. When $ere exists an additional interferer, we note that afE,AFpEfad x
Mt;"
is also valid ifI
af;'uj1
<<
M. Similarly, we have ayEsATpEfaj M<,?', wheretj
= M.,'+
01
+
oz/k. Accordingly, theoutput SINR obtained by using eqn. 28 for the first method, based on either the LS-SCORE or the cross- SCORE algorithms, is given by
SINR, = PG, x 0," -
PG, x 0,"
+
PG, x ot -1
+
I ~ S N RSinjlarly, we have af;'E&"Efad = Mp;' and
aFE,7A,FpEfa- -Mp;" for the second method, where
ps = Mcr,'
+
C T ~ a n d pj =MO?+
IT:, From eqn. 45, theoutput SINR and the expectation of the output SINR by
81 ...*....*e
...**'::.',
_ _ / - ...___.._... --..-
...
*...-
L
'%. -6 I I I I I I I -7 -6 -5 -4 -3 -2 -1 0 1 -8'
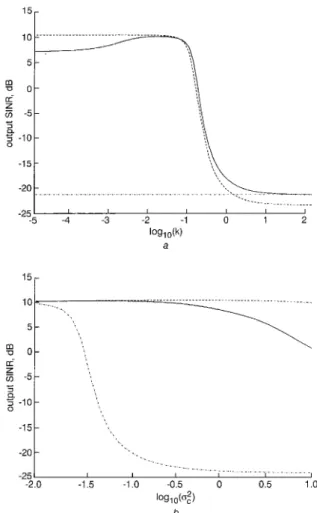
log d a g ) b Fig. 1 exumple IOutput SINR against logarithmic values of k and vz .fir - _ - _ simulation results using first method
* * * * theoretical results using eqn. 36
- theoretical results using eqn. 37
U Against log k
b Against log U:
using eqn. 28 for the second method, based on either the
LS-SCORE or the cross-SCORE algorithms, are approxi- mately given by SINR, = M2pF21 1
+
occs I'SNR+
Mp;'(l+
crcc,+
cr,c:)+
o;uFR;2a, c, ( 3 8 ) and EISINR,} - hf2p;2E{I
1+
gee,I
2 ) ~ ~ ~ -o:E(
I
c, 12M2pJ21NR+
Mp;'E{(l+
acts+
o,c:)]+
~ ? E ( u ~ ~ R G ~ u , I = M ~ ~ ; ~ s N R /[
~ p ; 2+
( M ~ I N R+
~ ) p ; 2 Ma: M' - 12+
MCTZ X (39)1
( M -2){[k2/(k
+
0 3 2 ~ a ; 4 ~ ( ~ 2 -I
uFad12)
M2 -I
f f U d 12+
M a ;+
oc 8 -z.
6 - z 4 - 3 Q 4 2 - 0 - -2 - -4 1 I I -6 -5 -4 -3 -2 -1 0 1 2 logio(k) a 'og,o(.c', b Fig. 2 example 2_ _ _ _
simulation results using second method* * * * theoretical results using eqn. 38
- theoretical results using eqn. 39
a Against log k
b Against log 0:
IEE Proc.-Radar; Sonar Navig., Vol. 148, No. 4, August 2001
Output SINR against logarithmic values of k and CT,' .for
5 Computer simulations
For all simulations, we use a ULA with M = 11 and
interelement spacing = half wavelength of the SOL A SO1 impinging on the array from 5" off broadside has SNR = 0 dB and CF = 2, while an interference with direc-
tion angle 30" off broadside has INR = 9 dB and CF = 3. Moreover, both the SO1 and interference are BPSK signals with rectangular pulse shape and baud rate=0.1. The sampling rate is set to 5. The noise is spatially white Gaussian with mean zero and variance one. All the simula- tion results of the first four examples are obtained by averaging 1000 independent runs and using 2000 data snapshots for each run. We observe that 2000 data snap- shots are enough for computing the correlation inatrkes required for the first four examples. 50 independent runs are averaged for showing the simulation results o f the last example.
Example I : Here, we confirm eqns. 36 and 37 when the optimal weight vector obtained by using the first method, based on either the LS-SCORE or the cross-SCORE algorithm, has the form of eqn. 28. Fig. 1 shows the array output SINR against the logarithmic value of k
with =0.16 and against the logarithmic value of
05
with k=0.01. We observe that the theoretical resultsI -20
I
I I I I I I -2.0 -1.5 -1.0 -0.5 0 0.5 1 .o b log,o(.,', Fig. 3 example 3~. original LS-SCORE algorithm
- first method based on LS-SCORE algorithm
_ - _ _ second method based on LS-SCORF. algorithm n Against log k
b Against log U:
Output SINR uguinst logurilhmic values o j k and U: f o r
obtained by cqns. 36 and 37 are close to the simulation results. We also note that the mismatch between the theoretical and simulation results increases as of/k increases. This is mainly due to the fact_ that decrcasing,
o:/k improves the approximation a7EsA;'Efad 0 for deriving eqn. 32.
E?cumplc 2: Here, we confirm e q m 38 and 39 when the optimal weight vector obtained by using the second method, based on either the LS-SCORE or the cross- SCORE algorithm, has the form of eqn. 28. The output SINR against the logarithmic value of k with 0; = 0.16, and against the logarithmic value of of with k = 0.001, are plotted in Fig. 2. We observe that the theoretical results obtained by eqns. 38 and 39 are close to the simulation results.
E-xumple 3: This example shows the effectiveness of thc
proposed methods based on the LS-SCORE algorithm. Substituting Rxx(cc, z) = rJS(cc, z ) a d u j into eqn. 11, we obtain r x r ( f )
=&(A
z)c = rFS(cc, z)(a5'c)ad+
a, that has the form of ad+
crcae, where oc = l/[r,,(sc, z)(a:c)]. Letocar. be a white Gaussian random vector with mean zero and covariance matrix o:I. Fig. 3 depicts the output SINR against the logarithmic valuc of k with of = 0.16 and
- - . . ...~... m
.5c
-20t
log, a@:) b Fig. 4 u u m p b 4Outpit SINR against logarithmic values of k and G: f o r
original cross-SCORE algorithm
- first mcthod bascd on cross-SCORE algorithm
.... second method based on cross-SCORE algoritliin
U Againsl log k b Against log U; 198 400 800 1200 1600 2000 -20;
'
'
'
'
'
'
'
'
'
number of snapshots a 1 5 1 (iii) I I I I I I I I I I , 0 400 800 1200 1600 2000 number of snapshots bOulput SINR against number ojsiiapshots,for example 5 -25 I
Fig. 5
(i) Original algorithm without CFE
(ii) First method based on algorithm with random CFE (iii) Second method based on algorithm with random CF'E (iv) Oiiginal algorithm with random CFE
(I LS-SCOKU algorithm
b Ci-oss-SCORE algorithiii
against the logarithmic value of oz with k=0.01. The simulation results of the original LS-SCORE algorithm are also provided for comparison. We observe that the proposed methods based on the LS-SCORE algorithm can effectively alleviate the performance degradation due to the random CFE by choosing a suitable k. Fig. 3h also shows
that the second method is more effective than the first method, especially for large C T ~ .
Example 4 : Here, we show the effectiveness of the
proposed methods based on the cross-SCORE algorithm. Substituting &(a, z) = rSs(c(, z)adai' into eqn. 10, we obtain R,,(.f;
z)
= rJc(, z)adaf +R,(,f;z)
that has thc form of adaf+
oCRe(,f; z), where g c = l/[r& z)]. Let the elements of R,(f; z) be i.i.d. white Gaussian randomvariables with mean zero and variance one. The output SINR against the logarithmic value of k with 03 = 0.16 and against the logarithmic value o f 0% with k=0.01 is plotted
in Fig. 4. We observe that the proposed methods provide satisfactory performance when k is appropriately chosen.
Fig. 4h also shows that the second method is more robust than the first method, especially for large oz.
Example 5: We use the same SO1 and interference as those used in the above four examples, except that an additional IEE Proc.-Radac Sonar Navig., Vol. 146, No, 4, August 2001
BPSK interferer with rectangular pulse shape, direction angle = 40” off broadside, INR = 6 dB, CF = 4, and baud rate=0.1 i s a d d e d . k = 0 . O I , c r ~ = 0 . 1 6 , a n d C = I a r e u s e d by the proposed methods. Fig. 5 depict the output SINR against the number of data snapshots used. In comparison with the results of using the original SCORE algorithms, we observe that thc proposed methods inay provide bettcr pcrformance than the original SCORE algorithms, even in the presence of CFE. This is due to the fact that the term
(cr:/k)l in eqn. 27 for the first method can reduce the finite sample effect if 0: is small and k is appropriately set. The
second method uses the eigenstructurc of the autocorrela- tion matrix, and hence provides bettcr pcrformance under a siiiall C T ~ and suitable k.
6 Conclusions
This paper has shown that when the random CFE is an independent random sequence, the resulting cyclic correla- tion matrix equals the cyclic correlation matrix computed by using the actual cyclc frequency plus a Gaussian random error matrix. Rased on the theoretical result, two robust methods in conjunction with the SCORE algorithms have been devclopcd to alleviate the performance deterio- ration duc to random CFE. Moreover, we have cvaluated the performance for each of the proposed methods. The validity of thc theoretical work and the effectiveness of the proposcd methods has also been demonstrated by simula- tion results.
7 Acknowledgments
This work was supported by the National Science Council under grant NSC88-22 18-E002-027.
References
GARDNEK, W.A.: ‘Cycloslalionarity in communications and signal processing’ (New York, 1994)
AGEE, B.G., SCHELL, S.V, aud GARUNER, W.A.: ‘Spectral self- cohei-ence i-e.;tordl: A new approach to blind adaptive signal cxtraction implification of MUSIC and ESPRIT by exploita- tion of cyclostatioiiarity’, Pmr. IEEE, 1988, 7 6, pp. 845-847 SCHELL, S.V.: ‘Pcrformance analysis of cyclic MUSIC mcthod of direction estimation for cychslalionary signals’, MEE R u m Signal
P,nce.~s.. 1994, 42, (II), pp. 3043-3050
SCHELL, S,V: ‘hsyiiiptotic monicnts of estimated cyclic correlation matrices’, IEEE Pans. Signal Process., 1995, 43, (I), pp. 173-180 SCHELL, S.V; and GAKDNER, W.A.: ‘Progress on signal-selective direction finding’. Procccdings of 5th ASSP workshop on S’ectrm estimation mid modelling, 1990, Rochestcr. NY, pp. 144-148 BIEDKA, T.E., and AGEE, B.G.: ‘Subinterval cyclic MUSIC - robust
DF with error in cycle frequency knowledge’. Procccdings of 25th
Proc. IEEE, 1990,78, pp, 753-767
Asiloma Conference on Signals, systems orid comprriers. 1 Y Y I, Pacific Grovc, C A , pp. 262-266
LEE, J.-H., and LEE, Y.-T.: ‘Kohust adaptive array beamforming for cyclostationaiy signals under cycle frequency error’, IEEE Trum Aiztmnus Propug., 1999, 47: pp. 233-241
I,W, C.-C., and LEE, .I.-H.: ‘Robust adaptive array beamforming under steering vector errors’, IEEE Pans. Antennas Propug., 1997, 45, pp. 168 175
I O GIBRA, 1.N.: ‘Probability and statistical inference for scientists and enginccrs’ (Prcnticc Hall, 1973)
8
9
9
AppendixSince thc clcments of a, are white Gaussian random variables with mean zero and variance one, we have
E ( c, ] = E { c , ) = 0 (40) because E{afi‘a,} = E{a;‘ae} = 0. Consequently:
Next, we substitute U , = c,ad
+
cyl+
E,Ef;’a, inlo E{afR;’a,) and obtainE : ( u ~ R ; ~ ~ , ) x E{l e, 1’]u;E,A, “ - 2 E, H ad
+
E(I
c; 12]ayE,A;2E:a,+
E(a,HEl,A,2E;a,l (43)It I S easy to show that
E(aFE, 4 , 2 E 5 , ] = tracc{A,2] = ( M - 2)
(
0;+
-(44)
when using the first method, andk’ ( k
+
mt)*E[a:E,,4,*Epa,} = trace{AL2] = ( M - 2)-
(45) when using the second mcthod.