行政院國家科學委員會專題研究計畫 成果報告
以位移李次群合成 Homokinetic 聯軸機構
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 99-2221-E-151-016- 執 行 期 間 : 99 年 08 月 01 日至 100 年 07 月 31 日 執 行 單 位 : 國立高雄應用科技大學模具工程系 計 畫 主 持 人 : 李聰慶 計畫參與人員: 碩士班研究生-兼任助理人員:方廷鈺 博士班研究生-兼任助理人員:羅倩&;#20227; 報 告 附 件 : 出席國際會議研究心得報告及發表論文 處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢中 華 民 國 100 年 10 月 24 日
1
行政院國家科學委員會補助專題研究計畫
█ 成 果 報 告
□期中進度報告
以位移李次群合成 Homokinetic 聯軸機構
Synthesize Homokinetic Shaft-Coupling Mechanisms via Displacement Lie Subgroups
計畫類別:█ 個別型計畫 □ 整合型計畫
計畫編號:NSC 99-2221-E -151-016-
執行期間:99 年 8 月 1 日至 100 年 7 月 31 日
計畫主持人:李 聰 慶
共同主持人:
計畫參與人員:羅倩伃、方廷鈺
成果報告類型(依經費核定清單規定繳交):█精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
█出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管計
畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年 █二年後可公開查詢
執行單位:
國立高雄應用科技大學/模具工程系
中 華 民 國 100 年 10 月 15 日
行政院國家科學委員會專題研究計畫成果報告
以位移李次群合成 Homokinetic 聯軸機構
Mobility Study of Polyhedral Mechanisms via Symmetry Group Approach
計畫編號:NSC 99-2221-E-151-016
執行期限:99 年 8 月 1 日至 100 年 7 月 31 日
主持人:李聰慶 國立高雄應用科技大學模具工程系
一、中文摘要 Homokinetic 聯軸機構為允許傳動軸間 相對位置具有一定程度偏置量變化且能傳 遞角速度比為 1:1 的等速度聯軸器。本研究 成果根據位移李群理論及位移集的群代數 結構,提出一套系統化的新方法,合成一 系列具有 homokinetic 傳動特性的等速度聯 軸器。首先建構 3D 及 4D 位移次群的運動 生成元,且利用群積建立 5D 位移集的運動 生成元。接著,以群論法證明及推導具 Homokinetic 傳動特性的限制條件,再利用 所建立的運動生成元為鏈基,有系統的合 成以 3D 及 4D 位移次群與 5D 位移集機生 成元為基礎的三大類的等速度傳動機構, 這些聯軸器包含過度拘束及非過度拘束兩 大類型機構。此外更進一步利用群論的因 素交換或重序法和群加法則,有系統化合 成更多的新型等速度聨軸傳動機構。最 後,避免機構構形的奇異性後,選擇合成 實例製作實體模型,以驗證所提出方法及 結果的正確性及實用性。預期本研究成果 將可應用於並聯式機器人的手端非耦合轉 動的控制及許多工業傳動科技上。並能提 供機構學探討 homokinetic 運動傳遞基礎理 論之學術研究參考。 關鍵詞:Homokinetic 聯軸機構、等速聯軸 器、位移李次群、位移集、運動生 成元、因素交換或重序法、幾何限 制條件、構造尺寸限制。 AbstractHomokinetic shaft-coupling mechanisms are constant-velocity (CV) shaft couplings transmitting rotation with the angular velocity ratio 1:1 between shafts whose relative-position
offset may be constant or variable. The main purpose of our research is to propose a new systematic method to synthesize a lot of constant-velocity shaft couplings based on the Lie-group-algebraic properties of displacement set and displacement Lie group theory. First, we construct all primitive motion generators of 3D & 4D displacement subgroups using the group-theoretic approach and create all possible generators for 5D motion subset by the group product of subgroups. Next, we verify and derive the geometric constraints for homokinetic transmission via the group theory. Then, using the derived mechanical generators as the basic building chain, we synthesize three major families of CV transmission mechanisms which are characterized by subchains of generators for 3D & 4D subgroups and for 5D motion subsets. They include overconstrianed & non- overconstrained (or isoconstrained) mechanisms. In addition, applying the commutation of factors or the reordering method and group compositions, we systematically provide more constant velocity shaft couplings. Finally, after avoiding the singularity of configuration, we proceed to confirm the correctness and availability of the proposed method and findings by means of producing the physical prototypes. It is expected that the new findings of this research will not only be applied to the uncoupled actuation control of rotation for end-effector of parallel robots or to various industrial applications but also be used as the references of academic research or those of studying and synthesizing homokinetic transmission of motion.
Keywords: Homokinetic shaft-coupling mecha- nism, Constant-velocity coupling, Displacement Lie subgroup, Displacement subset, Motion generator, Commutation of factor or reordering method, Geometric constrained condition, Structural dimensional constraints.
3
二、緣由與目的
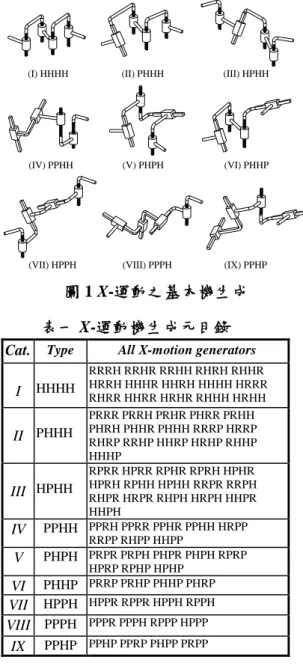
Homokinetic 接頭(Homokinetic joints)又 稱 等 速 度 聯 軸 器 (Constant-velocity couplings),用於傳遞兩轉軸間角速度比為 1:1,且允許其傳動軸相對位置具有一定程 度偏置量變化的等速度傳動機構 [1],已廣 泛使用於車輛或各種工業應用中。目前已 有許多等速聯軸器 [2-16],存在於各種不 同的動力傳遞場合;近來更由於可以應用 於並聯式機構的手端非耦合轉動的控制 [17-18],相關研究因而再度受到相當程度 的重視。早期 Freudenstein 曾根據構造及功 能法數目合成出一類具有對稱性的等速聯 結器 [13,16],也有ㄧ些學者利用螺旋幾何 及代數的方法,直接合成具平行或相交兩 轉軸間的等速傳動機構 [11,14,15];最近筆 者已發表群論法-Schoenflies 次群合成過度 拘束的等速聯軸機構的研究成果[19]。然 而,如何以雙 Schoenflies 5D 位移集及其他 3D、4D 位移李次群,有系統的合成所有具 有 homokinetic 傳動的機構,目前國內外仍 未有學者加以探討。因此,如何系統化產 生一系列新型等速聯軸傳動機構,供工業 或機器人運動傳遞的選擇,特別是能以位 移群理論提出一套新的系統化合成方法, 仍是非常值得繼續研究的主題。而有關位 移李次群運動生成元的初步理論,筆者根 據近幾年來所提出的仿平面(Pseudo- planar) (簡稱 Y) [20,21]、Schoenflies (簡稱 X) [22, 23] 及 Double-Schoenflies (簡稱 X-X) [24] 等機生成元理論加以延伸及應用。因此, 本 研 究 成 果 乃 根 據 位 移 李 次 群 (Displacement Lie Subgroups) 及 其 群 積 (Composition product),有系統地提出一套 新 的 群 論 法 則 , 合 成 出 一 系 列 具 有 homokinetic 傳動特性的新型聯軸機構。 本硏究所得的機構可以分為三大部分加 以呈現: (I)以 3D 位移次群機生成元為鏈基 之等速傳動機構、(II)以 4D 位移次群機生 成元為鏈基之等速傳動機構、及(III) 以 5D 位移集機生成元為鏈基之等速傳動機構。 其中第一及二部分機構分別採用的生成 元,有 3D 仿平面、平面、空間平移 [20,21] 及 4D Schoenflies [22, 23]等位移次群的運 動鍵(Kinematic bonds),此兩部分合成的傳 動 機 構 屬 於 過 度 拘 束 機 構 (Over- constrained mechanisms)。至於第三部分機 構則使用兩個 3D 或 4D 位次移群積之位移 集的運動鍵,如文獻 [24] 所提出的第一、 二類雙 Schoenflies 運動生成元(Generators of double-Schoenflies motion ),或將 4D 位 移次群加入 1D 位移群而得的運動鍵;此部 分 所 得 機 構 屬 於 非 過 度 拘 束 機 構 (Nonoverconstrained or isoconstrained mechanisms)。除此之外,將群論因素交換 或 重 序 法 (Commutation of factor or re- ordering method)應用於第三部分的合成, 進一步系統化產生更多具有 Homokinetic 傳動的聨軸機構,以充實機構運動學學理 的探討。 三、研究報告的內容 I. 運動位移集及其機生成元 I.1 Schoenflies 位移次群及機生成元 一 種 特 殊 的 四 自 由 度 運 動 類 型 , 稱 Schoenflies 運動[22],或簡稱 X 型運動。此 種運動型式包含任意的空間平移運動及繞 平行於固定軸向之任意轉軸轉動的旋轉運 動。X 型運動位移集具有四次元(4D)位移李 群的代數結構,為一般六次元(6D)位移李 群的 4D 位移次群。Schoenflies 位移次群精 確地表示為 X(w)(或{X(w)}),其中 X 表示 Schoenflies (或 Schönflies)運動類型,w 是已 知的單位向量,代表可能旋轉的定軸向轉 軸方向。 根據群代數及其位移集的論點,利用單 自由度 Reuleaux 低對或鏈結平行四邊形 (Hinged parallelogram) 接 頭 (Pa) 的 串 聯 排 列,可以產生 Schoenflies 運動機生成元, 在避免有多餘的內可動性情形下,已獲得 九大類最基本的一般化機生成元,如圖 1 所示。若考慮迴轉對(R)為具有零節距值的 螺旋對(H)及用鏈接平行四邊形 Pa 接頭取 代一個或數個 P 運動對,總共可再合成 43 種 X 型機鍵基本生成元以及 82 種具 Pa 接 頭的 X 型機生成元,為簡化起見,省略其 相對應的機構構造圖示,僅以列表方式呈 現部分成果,如表一所示。有關 X 型運動 之缺陷生成元(Defective generators)可參考 文獻[22],在此不再贅述。
(I) HHHH (II) PHHH (III) HPHH
(IV) PPHH (V) PHPH (VI) PHHP
(VII) HPPH (VIII) PPPH (IX) PPHP
圖 1 X-運動之基本機生成
表一 X-運動機生成元目錄
I.2 雙 Schoenflies 運動及其機生成元
根據兩個 4D X-運動次群的群組合積 (Group composition product)原理及消除內部 多餘可動性,可以建構出雙 Schoenflies 運 動(或簡稱 X-X 運動)位移集;此為 6D 位移 李群的次流形簇(submanifold)。這種運動位 移集包含任意空間平移及任意兩個平行於 獨立定軸向的有序旋轉,也包括此兩旋轉 的積。為簡化起見,X-X 運動以兩個線性獨 立 向 量 u 及 v 表 示 為 X(u)X(v) ( 或 {X(u)}{X(v)})。串列安排兩個產生相異 X-運動的次運動鏈,即具有線性獨立向量 u 及 v 之 X(u)與 X(v),將導致介於兩端物體 間 X(u)X(v)積的運動鍵。雖然全部鏈的整體 或全部自由度是 4+4=8,但是兩端物體間 的連接性(Connectivity)卻為 5。兩端物體的 連接性為 X(u)X(v)的次方(Dimension),其值 為 5。此乃因為 X(u)X(v)=T 具有 3 個內部 多餘自由度的可動性。 根據群論的觀點筆者已提出兩類不可逆 表現的 X-X 運動[24]。這兩大類型分別為 X-1(u)X-2(v)與 X(u)X-3(v)積,均可用於合成 CVSC 機構,而其中X-i(u) (i=1,2 或 3)代表 在單元開放鄰域具有 4-i 次方之 X(u)的次 流形簇。第一大類型 X-1(u)X-2(v)積包含特例 G(u)G-1(v)=G(u)G(v)( 或 簡 稱 G-G) 運 動鍵 (kinematic bond) [21],這種類型中最具代表 性的一般化機生成元為具有 H 軸平行於 u 及 H 軸平行於 v 的 HHH-HH 開放鏈。表 二以簡單符號表示 X-X 運動中所有可能的 X-1(u)X-2(v)機生成元,而其相對應的開放鏈 有圖 2 可供參考。 (b) PHH-HH (a) HHH-HH (c) HPH-HH (d) HHP-HH (e) PPH-HH (f) PHP-HH (g) HPP-HH (h) HHH-HP (i) PHH-HP (j) HPH-HP (k) HHP-HP (l) PPH-HP (m) PHP-HP (n) HPP-HP (o) HHH-PH (p) PHH-PH (q) HPH-PH (r) HHP-PH (s) PPH-PH (t) PHP-PH (u) HPP-PH 圖2 第一大類型X-X運動生成元 表二 X-1(u)X-2(v)積的體現 表三 X(u)X-3(v)積的體現
All possible {X(u)}{X-3(v)} realizations HHHH-H PHHH-H HPHH-H HHPH-H PPHH-H PHPH-H HPPH-H PPPH-H
Cat. Type All X-motion generators
I HHHH RRRH RRHR RRHH RHRH RHHR HRRH HHHR HHRH HHHH HRRR RHRR HHRR HRHR RHHH HRHH II PHHH PRRR PRRH PRHR PHRR PRHH PHRH PHHR PHHH RRRP HRRP RHRP RRHP HHRP HRHP RHHP HHHP III HPHH RPRR HPRR RPHR RPRH HPHR HPRH RPHH HPHH RRPR RRPH RHPR HRPR RHPH HRPH HHPR HHPH IV PPHH PPRH PPRR PPHR PPHH HRPP RRPP RHPP HHPP V PHPH PRPR PRPH PHPR PHPH RPRP HPRP RPHP HPHP VI PHHP PRRP PRHP PHHP PHRP VII HPPH HPPR RPPR HPPH RPPH VIII PPPH PPPR PPPH RPPP HPPP IX PPHP PPHP PPRP PHPP PRPP
Category All possible X-1(u)X-2(v) realizations
I HHH-HH PHH-HH HPH-HH HHP-HH PPH-HH PHP-HH HPP-HH II HHH-HP PHH-HP HPH-HP HHP-HP PPH-HP PHP-HP HPP-HP III HHH-PH PHH-PH HPH-PH HHP-PH PPH-PH PHP-PH HPP-PH
5 (a) HHHH-H (b) PHHH-H (c) HPHH-H (d) HHPH-H (e) PPHH-H (f) PHPH-H (g) HPPH-H (h) PPPH-H 圖 3 第二大類型 X-X 運動生成元 而 第 二 大 類 型 X-X 運 動 生 成 元 僅 有 X(u)H(N,v, p)積的機生成元,其中節距 p 為 任意已知實數,包含特殊例 p=0。一般而 言 , 可以寫成 X(u)X(v)=X(u)H(M,v,q)=[H (N1,u,p1)H(N2,u,p2)H(N3,u,p3)H(N4,u,p4)]H( M,v,q) 且 其 相 對 應 的 最 基 本 實 體 呈 現 為 HHHH-H 機生成元。而屬於此種 X(u)X(v) 運動機生成元可以 X(u)X-3(v)模化之,即為 X(u)運動生成元與在鏈初始位置平行於 v 的 H(或 R)運動對串連得之。表三即為不具 有內可動性單自由度運動對且可以產生 X(u)H(M,v,q)=H(N,u,p)X(v) 的 可 能 開 放 鏈 列表,其中有可能出現於第一大類的組 合,已加以省略。而八種 X-X 運動生成元 的一般性構造表示於圖 3,若將其中一個或 數個 H 運動對以 R 對取代,則可以得到 106 種相異結構。若這些構造組合的運動倒置 (Kinematic inversion)且將其 u 及 v 向量互 換,亦為 X-X 運動機生成元。 此外,再以 Pa 接頭取代一個或數個 P 運動對則可獲得 19 種至少具有一個鏈接平 行四邊型的 X-X 運動生成元;其運動倒置 且 u 及 v 向量互換後,亦為適當的此種運 動機生成元。在產生 X-X 運動的一般鏈中, 若兩相鄰螺旋運動對被選為具有相交轉軸 的 R 運動對,則 H-H 變為(R-R)=U 接頭。 因此,以 U 接頭可以建構出 32 種運動鏈供 產生 X-X 運動。表四及五分別列出這些特 殊構造的符號,以提供應用參考。至於其 相對應的 3D 圖示結構[21,24],為求精簡, 將予以省略。 表四 具 U 接頭的 X-1(u)X-2(v)機生成元 表五 具 U 接頭的 X(u)X-3(v)機生成元 更進一步,亦可考慮含有 C 運動對的運 動鏈。由於圓柱運動次群的積封閉性,C 運動對具有一些等值性。假設 R 或 H 軸平 行於 P 的方向,其可為 RP、PR、HP 及 PH、或若令 R 或 H 對共軸且避免等節 距 ,則其可以為 RH、HR 及 HH 等。此 種具有 C 運動對的特殊 X-X 生成元可以很 容易地由前述的一般性生成元產生之,故 此處不再加以列表。 II. Homokinetic 聯軸機構的合成 利用群論法(Group-theoretic approach)推 導及證明具有 homokinetic 傳動特性的一般 化幾何構造的限制條件,以前述建構的生 成元為鏈基,分為(一)以 3D 位移次群生成 元為鏈基、(二)以 4D 位移次群生成元為鏈 基、(三)以 5D 位移集生成元為鏈基等三大 類型,系統化合成所有可能的等速傳動機 構。為簡化說明起見,以下僅詳細敘述及 證明採用 4D Schoenflies 運動生成元為鏈 基,合成 Oldham 型等速軸聯結器的過程及 步驟,至於其他類型的 CVSC 機構的合成 過程則予以省略,僅呈現本研究合成所得 較簡單的結果,以提供可能的應用參考。 II.1 3D 鏈基聯軸機構 此類 CVSC 的基鏈構造具有 3D 空間平 移次群的 PPP 生成元,若將基鏈生成元以 鏈結平行四邊形接頭(Pa)取代 P 運動對,則 合 成 的 一 般 性 機 構 構 造 有 : R(PPP)R 、 R(PaPP)R 、 R(PPaP)R 、 R(PPPa)R 、 R(PaPaP)R 、 R(PaPPa)R 、 R(PPaPa) 及 R(PaPaPa)R 等 CV 傳動鏈。圖 4 表示此種一 般化構造的代表性傳動機構。
Special realizations of X-1(u)X-2(v) and their inversions
HH(R-R)H PH(R-R)H HP(R-R)H PP(R-R)H HH(R-R)P PH(R-R)P HP(R-R)P PP(R-R)P
H(R-R)HH H(R-R)HP H(R-R)PH H(R-R)PP P(R-R)HH P(R-R)HP P(R-R)PH P(R-R)PP
Special realizations of X(u)X-3(v) and their inversions
HHH(R-R) PHH(R-R) HPH(R-R) HHP(R-R) PPH(R-R) PHP(R-R) HPP(R-R) PPP(R-R)
(R-R)HHH (R-R)HHP (R-R)HPH (R-R)PHH (R-R)HPP (R-R)PHP (R-R)PPH (R-R)PPP
圖 4 R(PPP)R CVSC 機構 事實上,Myard CV 傳動機構為 5D 鏈基 傳動機構,並非真正的 3D 鏈基 Homokinetic 聯軸機構。然而,因其含有一個 3D 平面位 移群(G)的次運動鏈,如圖 5 所示,故特別 於此處加以說明。將圖中的平面運動群機 生成元以等值或仿平面運動機生成元取代 也可以產生等速傳動機構,而圖 6 僅呈現 較簡單的合成結果供參考。 圖 5 Myard CV 傳動機構示意圖
(a)RR(RRR)RR (general) (b)RURUR
(c)RUPUR (d)RURPRR (e)RR(PRP)RR (f)RUPPRR 圖 6 含 3D G 群生成元之 CVSC 機構 II.2 4D 鏈基聯軸機構 歐丹聯軸器(Oldham coupling)為三件式 聯軸器,中間構件鬆弛,意味著聯軸器可 以隨時被拆卸。在理論運動學上稱滑行對 P (Prismatic pair)的兩個滑動接頭連接其三構 件。因此,歐丹聯軸器為 PP 次鏈的技術應 用;而此兩個 P 對必須不互相平行。一般 而言,通常為互相垂直。當驅動軸及被驅 動軸互相平行或具有一定可變的互相平行 之偏置量時,這種聯結器能傳遞定速度比 為 1:1 的轉動,亦可用於傳遞具有一定或可 變平行偏置量轉軸間之等速比傳動,然而 其偏置量會很小。圖 7 表示這種基本歐丹 聯軸器的簡圖。在最佳構形時,兩平行軸 共軸且兩個 P 對無相對運動,此種情況將 提供最佳避免因擵擦產生能量遺失。 以群論的觀點而言,在圖 7 的歐丹聯軸 器閉迴路鏈中,PP 次鏈產生 2D 的平面移 動 T(k) (或{T(k)})群;平移平面垂直於 單位向量 k。連接桿 1 與 4 的兩串鏈產生的 位移次集 G1及 G2分別表示為 G1=R(A,k)T(i)T(j)=G(k)且 G2=R(B, k) (1) 其中,R(A, k)表示繞(A, k)軸的 1D 旋轉群; T(i)是平行於單位向量 i 的 1D 線性平移 群;G(k)為平行於垂直 k 之平面的 3D 平面 位移群(Group of planar displacements or planar gliding)。而等式R(A, k)T(i)T(j)=G(k)表示 3D 群 G(k)分解為其三個次群的積。假設積為 三次方元,則等式在單元變換鄰域恆成 立。故桿 4 相對於桿 1 的運動鍵 L(1,4)將為 L(1, 4)=G1G2=G(k)R(B, k)=R(B, k) (2) 因B, R(B, k)G(k),故此種 Oldham 鏈做 拘束運動且具一個自由度的有限可動性。 圖 7 基本 Oldham 聯軸器示意圖 假設將繞軸(M,u)轉動的迴轉對及平行 於 k 的滑行對加入 PP 次鏈的兩邊,如圖 8 所 示 。 而 所 得 的 RPPP 次 鏈 為 前 述 Schoenflies 運動基本機生成元之一。此次鏈 產 生 位 移 次 群 X(u)=R(M,u)T(i)T(j)T(k)= R(M,u)T(也等於 TR(M,u)),而 T 為 3D 空間 平移群(Spatial translational group)。在閉迴路 鏈中,介於桿 1 與 6 間的 L(1,6)運動鍵為
G1與 G2兩位移次集的交集:
G1=R(A, k)R(M, u)T(i)T(j)T(k)
=R(A,k)X(u)=R(A,k)T R(Q,u) (Q) (3a)
7 圖 8 Oldham 型 RRPPPR CVSC 的形成 因此,桿 6 相對於桿 1 的運動表示為 L(1,6)=G1G2=R(A,k)T R(Q,u)R(B,k) = R(A,k)T(k)T(k)R(Q,u)R(B, k) = G(k)T(k)R(Q,u)R(B,k) = R(B, k) (4) 而 L(1,6)=R(B, k)乃起因於集合關係:R(B, k) G(k)G(k)T(k)R(Q, u)。此確認桿 1 與桿 6 間的運動具有有限可動的單自由度。值得 注意的是:在圖 8 中加入圖 7 運動鏈的 R 對 為無效用的,故為惰接頭。然而,加入的 P 對允許軸向位移,並不影響連接軸的旋 轉。因此,圖 8 的運動鏈可以如同圖 7 的 運 動鏈 一 樣達成 CV 傳動 。在圖 7 中 Oldham 型 CVSC 是 2D 群T(k)的 PP 生成 元,而圖 8 中的新 CVSC 為 4D 群 X(u)的 RPPP 機生成元。更一般化的合成所得的此 種新 CVSC 表示於圖 9。很明顯地,X 運動 的 HPPP 生成元可以選擇列於表一 X 運動 機生成元中的任何一個等值鏈取代之。本 研究合成所得九大類的具有 4D鏈基生成元 之 CVSC 機構一般性構造,如圖 10 所示。 顯然這些合成鏈的倒置亦為適當的 CV 傳 動鏈。除此之外,若以鏈結平行四邊形 (Hinged parallelograms)取代滑行對也可產 生可行的 CVSC 傳動鏈。為簡化起見,本 報告不做詳細証明,僅列舉部分最簡單結 果,以提供參考。 圖 9 RHPPPR 歐丹型 CVSC 之形成 (a) RHHHHR (b) RPHHHR (c) RHPHHR (d) RPPHHR (e) RPHPHR (f) RPHHPR (g) RHPPHR (h) RPPPHR (i) RPPHPR 圖 10 4D 鏈基一般性 CVSC 機構 (a)R(PRRR)R (b) R(RPRR)R (c)R(PPRR)R (d) R(PRPR)R (e)R(PRRP)R (f) R(RPPR)R (g)R(PPPR)R (h) R(PPRP)R 圖 11 具零節距之一般性 CVSC 機構
迴轉對 R 是零節距的 H 對,可以用於取 代 H 對而得適當的 CVSC 傳動鏈,但必須 注意四個節距不能同時相等。無疑地,這 些鏈的倒置也是 CV 傳動的可用鏈。而且 以鏈結平行四邊形取代任意 P 對亦導致更 多 CV 鏈,此處省略可能的 CV 結構示範。 在前述合成的 CVSC 鏈中,相鄰運動對間 的特殊幾何配置可以被採用。舉例而言, 具有不同節距且共軸的 HH 次鏈,或具有 P 對平行於 H 軸的 HP 及 PH 次鏈等值於 C 對。 這些鏈仍然達成平行迴轉對間的 CV 傳動。 圖 11 及 12 表示這種不具有 H 對的 CVSC 鏈。為了容易應用起見,圖 13 的四 種簡單機構例子具有些許的對稱結構,實 際應用時可以組合數個這些機構而成。圖 14 中的構造直接由前述的一般性結構獲得 之,頗具有應用潛力,圖中具有底線的字 母代表 Schoenflies 運動生成元。 (a) RRRCR (b) RRCRR (c) RPRCR (d) RPCRR (e) RRPCR (f) RPPCR (g) RPCPR 圖 12 具 C 對之 4D 鏈基一般 CVSC 機構 (a) RPRRRR (b) RPRRPR (c) RRPPRR (d) RRCRR 圖 13 由一般性構造獲得之特殊 CVSC (a) RRPaPaRR (b) RRRPaRR (c)RCPRR (d) RRCRR 圖 14 簡單 4D 鏈基 CVSC 機構 II.3 5D 鏈基聯軸機構 本節呈現以兩大類雙 Schoenflies 運動機 生成元合成所得 5D 鏈基 Homokinetic 聯軸 機構之研究成果,詳細合成過程及證明則 予以省略。圖 15 為 X-1(u)X-2(v) 5D 鏈基聯 軸 機構概念說明,據此圖可以合成許多 CVSC 機構 , 代 表 性的一般機構示於圖 16,而其中比較簡單的構造則表示於圖 17。 圖 15 X-1(u)X-2(v) 5D 鏈基 CVSC 示意圖 (a)R(HPHHH)R (b)R(HPPHH)R (c)R(HHHHP)R (d)R(HPPHP)R (e)R(HPHPH)R (e) R(HPPPH)R 圖 16 X-1(u)X-2(v) 5D 鏈基 CV 聯軸機構 同理,X(u)X-3(v) 5D鏈基機生成元的合成概 念表示於圖 18。據此亦可產生許多的 CV 傳動機構,幾種代表性的一般化典型的機 構則呈現於圖 19,較簡單且可能具有應用 潛力的機構示範於圖 20。
9 (a)R(HHUH)R (b)R(HUPH)R (c)R(RRPRR)R (d)R(RRUR)R 圖 17 X-1(u)X-2(v) 5D 鏈基特殊 CV 機構 圖 18 X(u)X-3(v) 5D 鏈基 CVSC 示意圖 (a)R(HHHHP)R (b) R(HPHHH)R (c)R(HHPHH)R (d) R(PPHHH)R (e)R(PHPHH)R (f) R(HPPHH)R (g) R(PPPHH)R 圖 19 X(u)X-3(v) 5D鏈基聯軸機構 (a)R(UHHH)R (b) R(HHPaHH)R (c)R(UHPH)R (d) R(RCC) R 圖 20 X(u)X-3(v) 5D 鏈基聯軸特例機構 III 重序法合成 CVSC 機構 利用群論的因素交換或重序法於前述步 驟的第三部分傳動鏈,可以進一步系統化 合成更多具有 Homokinetic 傳動的新型 CV 聨軸機構,有關此種方法的理論及證明請 參考筆者文獻[21,24]。本節僅選擇計畫研 究成果中幾種比較簡單的一般性或特殊構 造呈現於圖 21 供機構學理及應用參考。 (a)R(HPPPH)R (b) R(HHPHH)R (c)R(RRPRR)R (d) R(RPPPR)R (e) R(UPU)R (f) R(HPHHH)R 圖 21 重序法合成之 CV 機構 IV 機構實體模型製作 本節將研究結果與現存的傳動機構初步 比較其優缺點後,由一般性的構造中挑選 出三種構件較少且具有理論應用實務的簡 單機構,製作機構實體模型,進行模擬測 詴,如圖 22 所示,以提供機構運動學學理 探討及理論教學應用之參考。 (a)模型-I (b) 模型-II (c)模型-III (d) 全模組 圖 22 CVSC 聯軸機構模型
四、結論與討論 本研究成果提供一套以位移李次群合成可 以具有適當偏置量之兩平行轉軸間 homokinetic 等速傳動機構的系統化方法及理論。三大類型 之 Homokinetic 聯軸機構: 3D、4D 位移群及 5D 位移集等鏈基 CV 傳動機構的一般性構造被原 始地提出,而從這些一般性構形可以直接獲得 許多新的特殊構造,將供兩平行軸間能傳遞均 勻運動之有潛力的應用。該研究成果亦將提供 機構運動學探討等速聯軸器(CVSC)基礎理論 之學術研究參考。未來或許可以將其應用於並 聯式機器人的手端非耦合轉動的控制使用,以 及各種重型工業傳動應用的場合。新合成的聯 軸機構,將會比現有的歐丹聯軸器允許有更大 的轉軸偏置量,且特別容許具有軸向的 3D 偏 置量,在應用上會更具有彈性,而且更可解決 現有等速傳動機構的缺點。 研究中建構完成的運動機生成元,有助於 空間機構運動學構造合成理論及應用,預期未 來會漸漸形成空間機構學術理論的小突破。以 雙 Schoenflies 運動機生成元或利用重序法合成 的 CVSC 機構,屬於非過度拘束的傳動機構, 應更具備應用潛力及實用價值。而以 3D 圖示 說 明 或 建 構 實 體 模 型 提 供 更 容 易 應 用 之 參 考。最後,期望除前述所得新結果外,未來可 延伸本研究所提出的群論合成法於產生任意 兩相交轉軸間具有 homokinetic 等速傳動機構 新類型的構造合成。 五、參考文獻
[1] Dudita, F., Cuplaje Mobile Homocinetice, Editura Tehnica., Bucarest, 1974.
[2] Willis, R. Principles of Mechanism, Camabridge, 1841, pp.166-167.
[3] Reuleaux, F., Theoretische Kinematik: Grundzüge
einer Theorie des Maschinenwesens, 1875,
Vieweg, Braunschweig, Reprinted as Kinematics
of Machinery, Dover, 1963, pp.315-136.
[4] Myard, F. E., “Théorie Générale des Joints de Transmission De Rotation, “ Le Génie Civil, Vol.101, No.15, 1933, pp.345-349.
[5] Myard, F. E., “Joint Homocinétique de Transmission a rouleaux ou billes,” Brevet D’invention Gr.5.-Cl.3, No.773.714, 1934.pp.1-7.
[6] Kutzbach, K., “Quer- und Winkelbewegliche Gleichganggelenke fur Wellenleitungen,” VDI-Zeitschrift, 81(30), 1937, pp.889-892. [7] Steeds, W., Mechanism and the Kinematics of
Machines, Longmans Green, London, 1940.
[8] Rzeppa, A. H, "Universal Joint Drive," Mach. Des., April, 1953, pp.162-170.
[9] Ferguson, E. S., "Kinematics from the Time of
Watt," Smithsonian Institution, United States National Museum Bulletin, 1962, No.27, pp.221. [10] Chironis, N. P., Mechanisms, Linkages, and
Mechanical Controls, 1972, pp.326-327.
[11] Hunt, K. H., “Constant-Velocity Shaft Couplings: A General Theory,” ASME Trans., J. Eng. Ind., Vol.95, No.2, 1973, pp.455-464.
[12] Mabie, H. H., C. Reinholtz, Mechanisms and
Dynamics of Machinery, John Wiley &Sons, 4th,
Ed., 1987, pp.44-50.
[13] Freudenstein F., Maki, E. R., “Creation of Mechanisms According to Kinematic Structure and Function,” Environment and Planning B, Vol.6,, 1979, pp.375-391.
[14] Gilmartin, M. J., Duffy J., “Displacement Analysis of Spatial 7R Mechanisms Suitable for Constant-Velocity Transmission Between Parallel Shafts,” ASME Trans., J. Mech. Des., Vol.101, No.3, 1979, pp.604-613.
[15] Lee, C.-C. "Development of a Constant-Velocity Coupling From Bennett 4R Chains," Proc. Intl. Conf. on Gearing, Trans. Mech. Sys., Nottingham, UK, 2000, pp.643-652.
[16] Tsai, L. W., Mechanism Design: Enumeration of
Kinematic Structures According to Function,
CRC, 2001.
[17] Lee, C.-C., J. M. Hervé, "Uncoupled Actuation of Overconstrained 3T-1R Hybrid Parallel Manipulators," Robotica, 27(1),2009, pp.103-117.
[18] Carricato, M. “Homokinetic Transmission of Rotational Motion via Constant-Velocity Joints in Closed-Chain Wrists,” Proc. 12th IFToMM World Congress, Besancon, Vol.2, 2007, pp.284-290. [19] Lee, C-C, J. M. Hervé, "Synthesize
Oldham-Style Constant-Velocity Shaft Couplings via Schoenflies Displacement Group," Proc. JSME Intl. Conf. on Motion and Power Transmissions, Sendai, Japan, May 13-15, 2009, pp.584-589.
[20] Lee, C.-C., J. M. Hervé, "Cartesian Parallel Manipulators with Pseudoplanar Limbs," ASME Trans. J. Mechanical Design, Vol.129, No.12, 2007, pp.1256-1264.
[21] Lee, C.-C., J. M. Hervé, "Translational Parallel Manipulators with Double Planar Limbs," Mech. Mach. Theory, 41(4), 2006, pp.433-455.
[22] Lee, C.-C., J. M. Hervé, "Type Synthesis of Primitive Schoenflies-Motion Generators," Mech. Mach. Theory, 44(10), 2009, pp.1980-1997. [23] Lee, C.-C., J. M. Hervé, "On Some Application
of Primitive Schoenflies-Motion Generators," Mech. Mach. Theory, 44(12), 2009, pp.2153-2163.
[24] Lee, C.-C., J. M. Hervé, "Generators of the Product of Two Schoenflies Motion Groups," European Journal Mechanics/A Solids, Vol.29, No.1, 2010, pp.97-108.
1
出席國際學術會議報告
報告人姓 名: 李 聰 慶 職 稱: 教 授 服 務 機 關: 國立高雄應用科技大學模具工程系 補 助 單 位: 國 科 會 核 准 文 號: 國科會計畫編號 NSC 99-2221-E151-016 會 議 名 稱: 第 13 屆 IFTOMM 機構與機器科學世界大會(The 13th IFToMM World Congress, IFToMM 2011) 會 議 時 間: 一百年六月十九日至六月二十三日
會 議 地 點: 墨西哥 Gunajuato UCEA
發 表 論 文: 位移 6D 李群的兩個 5D 次流形簇之交集: X(u)X(v)X(s)X(t)
( Intersection of two 5D Submanifolds of the Displacement 6D Lie Group:
(一) 參加會議經過
機構與機器科學國際促進聯盟(International Federation for the Promotion of Mechanism and Machine Science 簡稱 IFToMM),是機構與機器工程領域中最大的學術團體,採會員 國制;其宗旨為促進機構與機器範疇的理論研究、技術發展、工程應用與國際合作。自從 1965 年創會以來,每四年舉行一次世界大會,今年是由墨西哥瓜娜華朵市(Guanajuato)的 瓜娜華朵大學(Universidad de Guanajuato)主辦第十三屆世界大會。 由於台灣並無航班直飛開會地點墨西哥瓜娜華朵市(Guanajuato),必頇經由美國轉機, 本人於六月十八日搭乘長榮航空先飛往美國洛杉磯,中間有 4 小時多的轉機時間,本應該 是很充裕,但因美國安檢嚴格加上很多乘客行李過多,造成十分匆促下才順利登上大陸航 空(Continental)直飛 Leon Guanajuato 國際機場的班機。十九日清晨抵達機場後,便有大會 工作人員開車接送到事先預訂的 Holiday Inn 旅館,到達旅館時是早上 8 點鐘,離 check in 時間尚久,就決定四處走走順便換披索(Peso),因為班機抵達時太早,機場兌換錢幣櫃台 尚未營業,到了市區又遇到是星期日銀行沒開,只好用提款機提領當地貨幣應急。 十九日下午到會場辦理註冊報到手續,發現墨國人喜歡收美金,歐元較不受歡迎。晚 上參加歡迎雞尾酒會,此次台灣有八位學者及兩位博士生出席,比起大陸有三十多位學者 参與,是稍微少了些。 二十日早上九點舉行隆重的大會開幕儀式,在主辦此次大會的主席 Ricardo Chicurel-Uziel 教授的致詞中揭開序幕。此外,Guanajuato 市市長 Lic. Niceforo Guerrero 先生也親臨 會場,歡迎來自各國的與會學者能蒞臨墨西哥國家獨立誕生之地;目前國際企業如 General Motors、Volkswagen 和 VSCT 都在當地設廠,帶來不少就業機會。期盼主辦會議 的 Universidad Nacional Autonoma de Mexico 及 Universidad de Guanajuato 能藉由此次大會 為當地學者、工程師及人民帶來未來發展的榮景。
十點四十分至十一點四十分由 Guanajuato 大學校長 Arturo Lara-López 教授擔任 Keynote speaker,主講題目為 Impact of Strategies for Cooperative Project of R&D。十二點 開始各分組發表論文到下午一點,每天下午一到三點是午餐時間,三點到六點二十分則是 繼續各組論文報告。本人於此日 12:00-13:00 第一場 Linkages and Cams 論文發表會上發表 投稿被接受兩篇論文 中 的第一篇,題目為 Intersection of two 5D Submanifolds of the
3
Displacement 6D Lie Group: X(u)X(v)X(s)X(t) ; 下 午 四 點 到 五 點 本 人 又 主 持 一 場
Computational Kinematics-III 論文發表會,並在其中發表被接受的第二篇論文,題目為
Mobility Constraints and Configurations of 3- and 5-bar AKC Mechanisms。對此次兩篇論文主 題提問者,有加拿大 Angeles 教授、奧地利 Husty 教授、日本 Iwatsuki、義大利 Carricato 教授等。本人除了一一回答外,也從討論中得到不少寶貴意見與未來研究方向的啟發和靈 感,這就是參加國際研討會最大的收穫,能與研究領域相近的學者互相切磋,從中學習並 解開他們的質疑之點,以說服外國學者能認同自己的研究理念和成果。
二十一日早上九點至十點由來自日本的 Yuichi Okazaki 教授擔任 Keynote speaker,講 題為 Micromanufactories: A New Methodology for Sustainable Manufacturing 。其他開會議 程大致和第一天相似。
二十二日早上九點至十點由來自美國加州大學 Irvine 分校的 Michael McCarthy 教授擔 任 Keynote speaker ,講題為 The Task Selection Problem in the Kinematic Synthesis of Linkages 。上午十點到下午五點為最後一天的分組論文發表,接著下午五點到七點舉行
IFToMM 會員大會(IFToMM General Assembly),開始討論修訂 IFToMM 部分章程事項, 有人提議把目前英、法、德、俄四種官方語言改為只剩英語一種官方語言,經過大家討論 後 , 決 議 由 會 員 國 以 通 信 投 票 方 式 決 定 。 隨 後 舉 行 補 選 四 位 榮 譽 會 員 (Honorary Members),目前全世界共有四十八個會員國加入此屬於常設性的 IFToMM 國際組織,但 只有十二位榮譽會員,由於是終身榮譽,要等到有榮譽會員過世,才能再經由投票選出人 選遞補之,今年有四個名額,在各會員國代表慎重審查並投票後,選出來自台灣、德國、 印度及墨西哥四位學者。令人高興的是成大副校長顏鴻森教授也獲得此一殊榮,是對他多 年來在台灣學術界和國際聲望的表彰與肯定,讓與會的台灣人真是與有榮焉。最後大會要 決定四年後此會議主辦國,今年有德國、日本及台灣爭取主辦權,在各自提出報告後,德 國和台灣經過投票,兩輪都同票數平手,最後在主席裁決下由台灣大學團隊代表台灣爭取 到主辦 IFToMM 第十四屆世界大會的機會,這又是為台灣爭光的盛事,相信台灣能成功 辦好下屆大會,不只可讓各國學者更認識了解台灣在學術界及各方面的進步,也更能打響 台灣的知名度,是建立國際外交的好機會。 二十三日大會安排自費旅遊,行程為 Independence route,藉由参觀當年發生一連串事 件的地點,來了解當時是如何脫離西班牙統治, 而成立現在的墨西哥國的經過。二十四
日則有另一項自費行程,去參觀小金字塔,參加者人數眾多共出動三部大型旅行車,可見 這是一趟非常值得一訪的歷史古蹟地點。
(二) 與會心得
此次大會的特色有: 1. 開會地點有警察荷槍實彈在會場巡邏,可能跟墨西哥治安不好有關,有他們的保護 下,與會學者平安開完四天的議程。 2. 大會安排有醫療人員以備不時之需,由於當地的食物特色是又酸又辣,很多外來遊客 不適應墨西哥的食物,很容易就會發生腹瀉現象,因此大會準備不少止瀉藥,提供給 需要的學者。 3. 會議地點位於小山上,而觀光景點及鬧區卻在山下,若要下山並不是很方便,得搭計 程車才行。在市區車行駛於以前採礦所留下的坑道所改建成的道路上,甚為特殊,而 小山上並無處可去,可能是此原因,所以每場論文發表會出席率都相當高。(三) 建 議
1. 台灣這次好不容易爭取到 2015 年舉辦第十四屆 IFToMM 國際學術會議(IFToMM 2015 World Congress),但該組織所能提供的經費與資源很有限,希望政府相關單位能支 援經費及人力,協助台灣大學辦好四年後的會議,因為這是一次建立學術外交很好的 機會,能讓台灣在學術領域中打出知名度,讓國際學者真正看到台灣在研究方面的成 果及台灣存在的事實。 2. 多鼓勵學者及博士生投稿並出席各領域重要學術研討會,如此才有機會遇到在該領域 中的傑出學者,可以互相切磋討論,做學問不是關起門來做,而是要能跟世界接軌, 得到大家的認同與肯定。未來在投稿國際期刊時,更容易得到審稿學者的認可,而能 被接受刊登。 3. 由衷地感謝此次國科會研究計畫出國經費的補助,才能有機會與世界各國的學者專家 共同討論及交換研究心得,了解國際上機構與機器科學領域的研究現況。建議政府繼 續多贊助及鼓勵學者前往世界各個國家參與各項重要國際學術會議,以拓展學術外 交。5
(四) 攜回資料名稱及內容
1. 大會論文集(RAM)- IFToMM 2011 World Congress, June 20-23, Guanajuato, MÉ XICO。 2. The International Federation for the Promotion of Mechanism and Machine Science
(IFToMM), Guanajuato, MÉ XICO, 2011 世界大會會議議程壹冊。
3. The 2nd IFToMM Asian Conference on Mechanism and Machine Science, November 7-10, Tokyo, Japan 論文邀稿通知。
4. ARK - 13th International Symposium on Advances in Robot Kinematics, June 24-28, 2012, Innsbruck, Austria 論文邀稿通知。
5. The 2nd ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots, ReMAR2012, July 8-11, 2012, Tianjin University, China 論文邀稿通知。
6. The 2nd IFToMM International Symposium on Robotics and Mechatronics, ISRM 2011, November, 3-5, 2011, Shanghai, China 論文邀稿通知。
(五) 附錄 A – 發表之論文全文
位移 6D 李群的兩個 5D 次流形簇之交集: X(u)X(v)
X(s)X(t)
Intersection of two 5D Submanifolds of the Displacement 6D Lie Group:
13
國科會補助計畫衍生研發成果推廣資料表
日期:2011/10/23國科會補助計畫
計畫名稱: 以位移李次群合成Homokinetic聯軸機構 計畫主持人: 李聰慶 計畫編號: 99-2221-E-151-016- 學門領域: 機構與傳動無研發成果推廣資料
99 年度專題研究計畫研究成果彙整表
計畫主持人:李聰慶 計畫編號: 99-2221-E-151-016-計畫名稱:以位移李次群合成 Homokinetic 聯軸機構 量化 成果項目 實際已達成 數(被接受 或已發表) 預期總達成 數(含實際已 達成數) 本計畫實 際貢獻百 分比 單位 備 註 ( 質 化 說 明:如 數 個 計 畫 共 同 成 果、成 果 列 為 該 期 刊 之 封 面 故 事 ... 等) 期刊論文 0 0 0% 研究報告/技術報告 1 1 100% 已 完 成 計 畫 研 就 成 果 精 簡 報 告 一 份 研討會論文 0 0 0% 篇 論文著作 專書 0 0 0% 申請中件數 0 0 0% 專利 已獲得件數 0 0 0% 件 件數 0 0 0% 件 技術移轉 權利金 0 0 0% 千元 碩士生 1 1 100% 博士生 1 1 100% 博士後研究員 0 0 0% 國內 參與計畫人力 (本國籍) 專任助理 0 0 0% 人次 期刊論文 2 1 100% 計 畫 執 行 期 間 刊 登 之 相 關 的 期 刊 論文:ASME JMR 及 Mech.Mach.Thory 各一篇 研究報告/技術報告 0 0 0% 研討會論文 1 1 100% 篇 理 論 衍 生 成 果 已 發表 IFToMM 2011 World Congress 國 際 研 討 會 論 文 一 篇 論文著作 專書 0 0 0% 章/本 申請中件數 0 0 0% 專利 已獲得件數 0 0 0% 件 件數 0 0 0% 件 技術移轉 權利金 0 0 0% 千元 碩士生 0 0 0% 博士生 0 0 0% 博士後研究員 0 0 0% 國外 參與計畫人力 (外國籍) 專任助理 0 0 0% 人次其他成果
(
無法以量化表達之成 果如辦理學術活動、獲 得獎項、重要國際合 作、研究成果國際影響 力及其他協助產業技 術發展之具體效益事 項等,請以文字敘述填 列。)本計畫之研究理論所衍生的成果已發表一篇 IFToMM 2011 World Congress 國際 研討會論文成果 且相關的期刊論文:ASME JMR 及 Mech.Mach.Thory 各一篇 成果項目 量化 名稱或內容性質簡述 測驗工具(含質性與量性) 0 課程/模組 0 電腦及網路系統或工具 0 教材 0 舉辦之活動/競賽 0 研討會/工作坊 0 電子報、網站 0 科 教 處 計 畫 加 填 項 目 計畫成果推廣之參與(閱聽)人數 0
國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價
值(簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)
、是否適
合在學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。
1. 請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估
■達成目標
□未達成目標(請說明,以 100 字為限)
□實驗失敗
□因故實驗中斷
□其他原因
說明:
2. 研究成果在學術期刊發表或申請專利等情形:
論文:□已發表 □未發表之文稿 ■撰寫中 □無
專利:□已獲得 □申請中 ■無
技轉:□已技轉 □洽談中 ■無
其他:(以 100 字為限)
本研究理論衍生成果已發表一篇 IFToMM2011 World Congress 研討會論文