國 立 交 通 大 學
電控工程研究所
碩 士 論 文
發射載具的設計與控制
Launch Vehicle Design and Control
研 究 生:蕭惟庭
指導教授:林清安 教授
發射載具的設計與控制
Launch Vehicle Design and Control
研 究 生:蕭惟庭 Student:Wei-Ting Hsiao 指導教授:林清安 教授 Advisor:Prof. Ching-An Lin
國 立 交 通 大 學 電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering
July 2010
Hsinchu, Taiwan, Republic of China
發射載具的設計與控制
學生:蕭惟庭 指導教授:林清安 教授
國立交通大學 電控工程研究所
中文摘要
欲將衛星發射進入軌道,火箭是目前最常被使用的載具,利用持續的 推力將自身及酬載一同推入高空,並以多節的型式持續加速以節省燃料。 一般來說,火箭以垂直或接近垂直的角度發射,在大氣層中利用重力轉彎 減少空氣阻力,以免載具受到側向力矩損壞,脫離大氣層後,在適當的時 間與位置進行轉向,最後控制酬載在軌道上加速,並在預期的目標軌道上 以正確的飛行方向與速度入軌。本文由設計載具以及時間參數開始,之後 控制轉向與姿態,而最後在入軌加速階段,更以高度回授控制,讓軌道高 度符合要求。由於火箭升空時,大部分的受力,包括氣動力、重力皆不是 線性,除了需要預測軌跡以外,還需要在多次的模擬後進行改進。本文在 不同的軌道要求下,利用一些控制器,進行整體設計並加入誤差,而在模 擬結果中,使用的計算方式與控制法則能達到入軌的要求。Launch Vehicle Design and Control
Student:Wei-Ting Hsiao Advisor:Prof. Ching-An Lin
Institute of Electrical and Control Engineering
National Chiao Tung University
Abstract
A rocket is the most frequently used vehicle to launch a payload into orbit for taking advantage of its continuous thrust to lift itself and the payload into the high altitude and of the multi-stage mode of sustained acceleration to economize the use of propellant. General speaking, the launch angle of the rocket is vertical or near vertical and gravity turn is used to the reduction of air resistance for avoiding the vehicle from damage of lateral torque in the atmosphere; and further, it can be steered into different directions in proper time and position after leaving the atmosphere; finally, the payload can be controlled to accelerate and enter the orbit with accurate directions and speed of flight in the expected target orbit. This thesis starts on design of rocket and time parameter and then the control of steering and attitude; eventually it makes use of altitude feedback control to meet the requirement of orbit altitude in the final acceleration stage of entering orbit. Because the rocket is forced a lot while launching, including the nonlinear force of aerodynamics and gravity, it not only requires the anticipation of trajectories but also many times of simulation for improvement. This thesis researches on the design with the consideration of errors for meeting different requirements of orbits and results of the simulation successfully achieve the goal of entering orbit by the use of the controller and calculation methods in different cases.
誌 謝
在兩年的研究生活中,除了修課以外,還有論文的研究。其中最
要感謝的便是指導教授林清安博士的悉心指導,在我的學習過程中指
引方向及給予協助,除了在專業領域上的進步以外,也讓我了解了做
研究應有的態度與方法。
此外要感謝 Lab 606 的成員們,不論是學長、同學所給予的經驗
與意見,或是學弟們互相的討論,都讓我論文能夠更順利進行,不論
在學習或是生活上都有著很大的幫助。
最後要感謝的是家人不求回報的付出,在我求學之路上默默支持,
是我精神上最大的支柱。
目錄
第一章 緒論... 1 第二章 載具受力模型... 3 2.1 座標系定義 ... 3 2.2 物體的位置速度變化 ... 8 2.2.1 離心力對( , , )V γ ψ 的影響 ... 9 2.2.2 科氏力對( , , )V γ ψ 的影響 ... 10 2.2.3 速度對( , )γ ψ 的影響 ... 11 2.2.4 TVC系統、重力、空氣阻力對( , , )V γ ψ 的影響 ... 13 2.3 姿態變化 ... 14 2.3.1 尤拉角座標轉換 ... 14 2.3.2 尤拉方程式 ... 15 2.3.3 四元素方程式 ... 16 2.3.4 旋轉運動方程式 ... 17 2.4 氣動力模型 ... 17 2.5 火箭推力 ... 19 第三章 載具設計... 20 3.1 物理參數的設計: ... 22 3.2 時間參數的設計 ... 26 第四章 控制系統... 30 4.1 火箭轉向控制器 ... 30 4.1.1 重力轉彎 ... 30 4.1.2 大幅度轉向 ... 30 4.2 入軌前的精準控制 ... 31 第五章 模擬結果與討論... 34 5.1 軌道高度 300km入軌模擬結果 ... 345.1.1 入軌情形 ... 34 5.1.2 加上時間誤差 ... 36 5.2 以不同高度入軌的情形 ... 40 5.3 討論燃料比率及I 的影響sp ... 42 5.3.1 不同燃料比率的模擬 ... 42 5.3.2 入軌條件的臨界值與修正 ... 43 第六章 結論... 52 參考資料... 53
圖目錄 圖 2.1 慣性座標系、地球座標系、發射座標系示意圖... 3 圖 2.2 切平面座標與慣性座標關係圖... 5 圖 2.3 切平面座標系... 5 圖 2.4 體座標示意圖... 6 圖 2.5 速度座標示意圖... 6 圖 2.6 離心力之計算示意圖... 9 圖 2.7 離心力值計算... 10 圖 2.8 速度影響仰角γ 示意圖 ... 11 圖 2.9 速度對方向角影響一... 12 圖 2.10 速度對方向角影響二... 12 圖 2.11 推力、空氣阻力、重力方向示意圖... 13 圖 2.12 體座標下各種角度定義... 18 圖 3.1Mu-3-S-II入軌情形[6] ... 20 圖 3.2 典型的火箭升空過程[7] ... 21 圖 3.3 二、三階段佔總質量不同比例下的飛行軌跡 (15%~35%) ... 23 圖 3.4 二、三階段佔總質量不同比例下轉向後的飛行軌跡... 25 圖 3.5 轉向時間示意圖... 27 圖 3.6γ 變化示意圖 ... 28 圖 4.1 重力轉彎控制方塊... 30 圖 4.2 進行轉向的角度控制方塊... 31 圖 4.3 新的θc計算 ... 32 圖 5.1 未加誤差的控制情形(高度、速度、仰角、尤拉角)... 34 圖 5.2 未加誤差入軌後繞地運行(高度、速度、經度、緯度)... 35 圖 5.3 轉向時間誤差(-1s~+1s)自由飛行(高度、速度、仰角) ... 36 圖 5.4 轉向時間誤差(-1s~+1s)高度回授控制飛行(高度、速度、仰角) ... 37 圖 5.5 第三階段時間啟動誤差(-1s~+1s)自由飛行(高度、速度、仰角) ... 38 圖 5.6 第三階段啟動時間誤差(-1s~+1s)高度回授控制飛行(高度、速度、仰角) ... 39 圖 5.7 以不同高度入軌情形(高度、速度、仰角、尤拉角)... 41 圖 5.8 不同燃料比率的入軌情形(高度、速度、仰角、尤拉角)... 43 圖 5.9 入軌條件計算的時間關係... 44 圖 5.10 飛行仰角的變化圖... 47 圖 5.11 空氣阻力的模擬圖... 48 圖 5.12 推力與攻角對時間的關係圖... 49 圖 5.13 改善燃料比率後的模擬結果(高度、速度、仰角、尤拉角)... 50 圖 5.14 改善Isp後的模擬結果(高度、速度、仰角、尤拉角)... 51
表目錄 表 2.1 座標系統... 7 表 2.2 變數定義... 8 表 3.1 不同重量比例的能量獲得測試結果... 24 表 3.2 目標為海拔 300km圓形軌道運行入軌的火箭物理參數 ... 26 表 4.1 預期的高度變化量... 32 表 5.1 目標 400km高空的衛星物理參數 ... 40 表 5.2 三個不同燃料比率的火箭物理參數... 42
第一章 緒論
載具火箭功能很多,其中一個便是將衛星送至軌道中運作,隨著目前各國太 空科技漸漸發展,衛星無論在通訊、氣象、探勘、國防上都扮演著舉足輕重的角 色,但台灣卻始終無法自力發展衛星,重點就在於載具發射到入軌的技術無法掌 握,本篇論文便是在討論如何利用推進系統將衛星送至高空而繞地運行。 一般來說火箭為了節省燃料會分階段進行推進,一段燃料燃盡後會將一些部 位適時脫節,例如前一階段的火箭外殼、接頭等等,減輕質量而節省燃料、容易 加速且容易保持穩定。衛星的分類依軌道高度可分為高、中、低三種,高軌道衛 星在離地約三萬六千公里高空,與地球相同角速度運行,低軌道大約介於160至 2000公里的空中,仍會受到微弱的空氣阻力,2000至36000公里之間則為中軌道 衛星,而著名的國際太空站即為位於340至360公里之間的低軌衛星[2]。 本案例討論為四階段的火箭,每一節功能皆有不同功能與目標,其中第一節 以增加高度與重力轉彎為主,目標為推出大氣密度最高的部分。第二節則是繼續 增加高度,並且在一定高度下進行轉向。第三節在接近軌道的高空加速,並控制 高度、速度方向入軌。第四節則為衛星繞地運行。火箭在大氣層中升空時,為了 增加穩定度,最常使用的方法為重力轉彎,能使速度方向與載具重合,減少空氣 阻力所造成的力矩。在第二階段時,因空氣稀薄之故,阻力較小,經計算時間點 轉向,並給予一段時間自由飛行以增加高度。當高度足夠後啟動第三階段,因重 量輕、加速快,故加速以第三階段為主,並給予高度、速度與姿態角的回授,希 望能夠控制載具能維持預設的目標高度穩定加速入軌。衛星入軌的要求為:受到 的地球重力剛好為能使其進行等速率圓周運動之向心力,以圓形軌道來說,速度 方向必須平行於該處地表之切線方向,且速率值達到需求。現實中衛星軌道不一 定為圓形,大部分為橢圓形,速度方向就不一定是地表切面,但若先利用圓形軌 道入軌後,給予一些加速度來進行轉向修正為橢圓會是較容易的做法,但之後的 修正本文便不予討論。2 然而,在一個三個方向移動與三個方向轉動的六自由度火箭中,力量不只會 影響火箭的位置,更會影響到火箭的飛行姿態,進而需要討論其是否真能以預期 的方式加速,許多側向較小的外力不能輕易忽略。以每秒數千公尺高速運行的火 箭控制不易,且近圓形地球的重力與大氣組成複雜,在大氣中載具會因大氣力矩 產生轉向。載具的重量配置以及現實燃料與載具設計有一定的規格,在這些限制 之下欲達到期望的軌道位置之過程極為繁瑣,並思考未來技術進步可求改進的地 方為何等等。 本文分數章節依序討論達到目標,第二章中解釋在載具受力後所做的位置、 姿態、速度等等改變。第三章討論載具的物理參數與飛行時間的設計。第四章為 控制系統的設計。第五章為模擬結果與討論,並延伸額外的參數討論與模擬。第 六章為結論。
第二章
載具受力模型
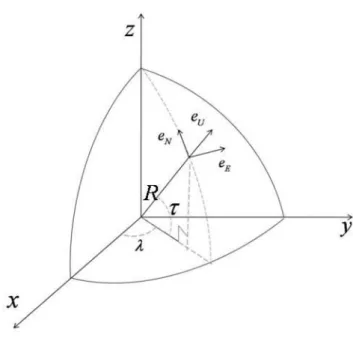
物體在空間中受到力與力矩的影響,會使其位置、速度、姿態有所改變,因 此必須先求出在地球上物體受力的改變情形,之後才容易進行設計與推導。本章 在2.1節定義座標系,2.2節推導載具受力所造成的位置速度變化方程式,2.3節則 推導載具受力的姿態變化方程式,2.4節計算氣動力模型,2.5節計算載具本身的 推力模型。 2.1 座標系定義 首先,為了計算動態變化以及推導公式,我們需要利用不同座標系轉換,以 求出完整的載具受力情況,首先介紹的為慣性座標系、地球座標系以及發射座標 系,如圖2.1所示。 圖 2.1 慣性座標系、地球座標系、發射座標系示意圖 慣性座標系( , , )x y z 以地心為原點,x 軸為 t=0 時沿著赤道平面往經度 0 度之方向,z 軸為往地 球北極之方向,y 軸則為右手定則之另一軸,可計算出目前地心與載具之間絕對 的位置關係。4 地球座標系( , , )λ τ R 以地心為原點,隨著時間自轉之座標系,t= 時0 λ = 與慣性座標正0 x軸方 向重合,R為物體質心與地心之距離,τ則為與赤道面的夾角,即為我們熟知的 地球經緯度座標系。此外,定義海拔高度h= − ,R R0 R 為地球半徑。因地球自0 轉使得座標時變,將地球座標與慣性座標關係式列為: ( ) cos( ) cos ( ) sin( ) cos ( ) sin x t R t y t R t z t R λ ω τ λ ω τ τ = + = + = (2.1) 其中ω為地球自轉之角速度值。 發射座標系 (X Y ZL, L, L) 以發射點為原點,地表平面之正上方為X ,地表平面往發射方向為L Z ,剩L 下一軸以符合右手定則繪出,以本篇論文來說,為求軌道最貼近地球赤道面,通 常會選擇正東方發射。 切平面座標系( ,E N U, ) 以物體質心所在位置對以地心為圓心之球面作切平面,U 為垂直平面向上, N 為切面上指向正北方(該球面之北方),E則為符合右手定則之另一軸,朝 向正東 ,沿地球自轉之切線速度方向。將物體所在位置可繪出如圖 2.2 的關係圖。
圖 2.2 切平面座標與慣性座標關係圖
圖 2.2 為地球一部分之剖面,以慣性座標之原點為地心,將切面上之 (e eE, N,eU)取出可繪出圖 2.3 之切平面座標系,即為( ,E N U, )。其中可定義出γ 、
ψ 、 V ,γ 為飛行的仰角,ψ 為方向角, V 則為速度之值。
6 體座標系 (X Y Zb, b, b) 物體(機身)指向為X ,b Z 為向下,b Y 向右,如圖 2.4 所示。 b 圖 2.4 體座標示意圖 速度座標 (X Y ZV, ϒ, Ψ) 取物體速度方向為X ,以速度方向及切平面座標之 U 軸畫一假想圓,V X 通V 過圓上之點的切線朝向正 U 軸之方向為Yϒ,接著利用右手定則取 ZΨ, ZΨ落於 EN 平面之上,而計算受力時,ZΨ、Yϒ上的分力分別會造成ψ 、γ 的改變,也可 視為速度方向變化,詳細可見圖 2.5,其中,αc為全攻角,µ 則如圖 2.5 所示。 圖 2.5 速度座標示意圖
將以上所有座標系可整理如表 2.1: 名稱 原點 描述 地心慣性座標 ( , , )x y z 地心 x:赤道面上指向初始時間的子午線。 y:符合右手定則座標。 z:正北極方向。 地球座標 ( , , )λ τ R 地心 λ:地球經度。 τ:地球緯度。 R:與地心的距離。 發射座標 (X Y ZL, L, L) 發射點 L X :發射點所在地表平面向上。 L Y :符合右手定則座標。 L Z :發射點所在地指向發射方向。 切平面座標 ( ,E N U, ) 載具質心 E:對地心作假想球切平面正東。 N:對地心作假想球切平面正北。 U:對地心作假想球切平面正上方。 體座標 (X Y Zb, b, b) 載具質心 b X :載具長軸方向,指向前方。 b Y :在火箭長軸的左右平面取垂直 X 的右方。 b Z :符合右手定則座標。 速度座標 (X Y ZV, ϒ, Ψ) 載具質心 V X :物體移動方向。 Yϒ:朝切平面座標 U 軸為正。 ZΨ:符合右手定則座標。 表 2.1 座標系統
8 2.2 物體的位置速度變化 在計算時運動狀態時,需要用到許多物理量,在此先定義如表2.2: λ 物體所在位置之經度。 E a E 方向的加速度分量。 τ 物體所在位置之緯度。 N a N 方向的加速度分量。 R 物體所在位置與地心之距離。 U a U 方向的加速度分量。 0 r 地球平均半徑。 γ 物體與切平面座標夾角。 h 物體所在位置之海拔高度。 ψ 物體切平面座標方向角。 ω 地球自轉角速率。 ( , )γ ψ 見圖 2.3 V 物體移動速率。 c α 全攻角。 T TVC 系統的推力。 α 攻角 D 空氣對速度反方向的阻力。 β 側滑角。 L 空氣對速度往物體垂直方向阻 力。 R 物體位置方向向量,見圖 2.6。 µ 見圖 2.5。 ω 角速度方向向量,見圖 2.6.。 表 2.2 變數定義 在圖 2.3 中,V 為物體移動速率,再利用γ 及ψ 定義速度方向,由速度方向 可求出經緯度及高度變化速率: cos cos cos cos sin cos sin V R V R h R V γ ψ λ τ γ ψ τ τ γ = = = = (2.2) 飛行體所在位置以地球座標( , , R)λ τ 表示,計算受力狀況時,將力量轉至切平面 座標以便於計算飛行體運動模式,而三個方向的加速度 (a aE, N,aU)對物體的 ( , , )V γ ψ 產生變化量如(2.3)式。
cos cos cos sin sin
1 1 1
sin cos sin sin cos
1 1 sin cos 0 cos cos V E N U a a a a V V V a a V V γ ψ γ ψ γ ψ γ γ ψ γ ψ γ ψ ψ γ γ − − = − (2.3) 其中, ( ,a a aV γ, ψ)代表了( , , )V γ ψ 的變化率,除了火箭本身的推力及空氣阻力以 外,還有地球自轉使載具受到的離心力、科氏力,將這些力量分開計算並定義各 力量的影響如下: 1 2 3 1 2 3 1 2 3 V V V V V V a a a a a a a a a a a γ γ γ γ ψ ψ ψ ψ γ ψ = + + = + + + = + + + (2.4) 其中(aV1,aγ1,aψ1)表示離心力造成的影響,(aV2,aγ2,aψ2)表示科氏力造成的影響, 3 3 3 (aV ,aγ ,aψ )表示重力、推力、空氣阻力造成的影響,除了這些力量造成的加速 度及角速度以外,速度也會對 ( , )γ ψ 的角速度產生影響為 (aγV,aψV)。 2.2.1 離心力對( , , )V γ ψ 的影響 在分析載具受到的離心力時,必須其作用於載具上加速度,投影至切平面座 標上。而作用於載具之離心力的大小及方向如圖 2.6 及圖 2.7 所示。 圖 2.6 離心力之計算示意圖
10 圖 2.7 離心力值計算 圖 2.6 中的ω為地球自轉角速度,以向量表示。經過− ×ωωR( × )計算後,離心 力在緯度τ處之加速度大小為 2 cos Rω τ ,如圖 2.7 所示,其中的的ω則為角速率 值。將離心力值投影至切平面座標以(aE1,aN1,aU1)表示,E方向分量為 0,可整 理如下: 1 2 1 2 1 : 0 : cos sin : cos cos E N U a a R a R ω τ τ ω τ τ − − (2.5) 將(2.5)式套用(2.3)式,離心力對( , , )V γ ψ 影響如下: 2 1 2 1 2 1
cos (cos sin sin cos sin )
cos (cos cos sin sin sin )
cos sin cos cos V a R R a V R a V γ ψ ω τ τ γ τ γ ψ ω τ τ γ τ γ ψ ω τ τ ψ γ = − = + = − (2.6) 2.2.2 科氏力對( , , )V γ ψ 的影響 計算科氏力的影響同樣要將其投影至切平面座標系,地球自轉角速度ω及物 體運動速度投影在切平面座標上的分量可表示如下:
: (0, cos , sin )
: ( cos cos ,V Vcos sin ,Vsin )
ω τ ω τ γ ψ γ ψ γ ω V (2.7) 科氏力造成的加速度可計算為:
2 det 0 cos sin
cos cos cos sin sin
E N U V V V ω τ ω τ γ ψ γ ψ γ × = e e e ωV (2.8) 其中e 、E e 、N e 為切平面座標上單位向量,計算行列式值可得到加速度在切平U 面座標下三個方向的分量,以(aE2,aN2,aU2)表示如下: 2 2 2
(cos sin sin cos sin )
(sin cos cos ) (cos cos cos )
E N U a V a V a V ω τ γ τ γ ψ ω τ γ ψ ω τ γ ψ = − = = − (2.9) 將(2.9)式套用(2.3)式,科氏力對( , , )V γ ψ 影響如下: 2 2 2 0 2 cos cos
2 (cos tan sin sin )
V a a a γ ψ ω τ ψ ω τ γ ψ τ = = = − (2.10) 2.2.3 速度對( , )γ ψ 的影響 如圖 2.8 可以明顯看出γ 的變化率直接由切線速率與半徑比值求得。 圖 2.8 速度影響仰角γ 示意圖
12
速度在仰角上的影響由速度分量Vcosγ 產生。而方向角ψ 的變化率則由速度及經
緯度決定,由圖 2.9 可看出,方向角隨經度改變而變,並且觀察出影響方向角變 化的速度分量為Vcos cosγ ψ ,接著,可從圖 2.10 得到轉動的半徑為Rcotτ ,因
緯度不同造成方向角變化率不同,低緯度時改變不明顯,尤其赤道的變化率為 0, 高緯度變化率較快,可整理出關係如下:
cos
tan cos cos
V V V a R V a R γ ψ γ τ γ ψ = = − (2.11) 圖 2.9 速度對方向角影響一 圖 2.10 速度對方向角影響二
2.2.4 TVC 系統、重力、空氣阻力對( , , )V γ ψ 的影響 TVC 系統造成的力量為物體體軸X 方向,對於速度影響為b α餘弦方向分量, 而正弦方向分量造成( , )γ ψ 的變化,將T、D、g三個力量分量方向繪出示意圖 如圖 2.11。 圖 2.11 推力、空氣阻力、重力方向示意圖 其中圖 2.11 利用了體座標系與切平面座標系,重力沿著切平面座標的負U軸向 下朝向地心,接著為了求得T及D對系統影響,由圖 2.5 右方小圖可看出 TVC 的推力在速度座標系上各方向造成的力量大小,而空氣阻力分力D則與速度方向 相反,造成速度V 的改變。另一個空氣阻力分力L與 sinT α 方向相同,垂直於速 度方向,進而影響γ 及ψ 的變化,將這些不同的力量整理如下:
[
]
3 3 3 1 ( cos sin ) 1( sin ) cos cos
1 ( sin ) sin cos V a T D mg m a T L mg mV a T L mV γ ψ α γ α µ γ α µ γ = − − = + − = − + (2.12)
14
將(2.6)、(2.10)、(2.11)、(2.12)代回(2.4)可得到完整公式:
[
]
2
1
( cos sin ) cos cos sin sin cos sin
V T D mg R m α γ ω τ τ γ τ γ ψ = − − + −
[
]
1 cos( sinT L) cos mgcos V
mV R
γ
γ= α+ µ− γ +
[
]
2
2 cos cos R cos cos cos sin sin sin
V ω
ω τ ψ τ τ γ τ γ ψ
+ + + (2.13)
1
( sin ) sin tan cos cos
cos V T L mV R ψ α µ τ γ ψ γ = − + − 2
2 (cos tan sin sin ) cos sin cos cos R V ω ω τ γ ψ τ τ τ ψ γ + − − 在進行分析與設計時,(2.2)式與(2.13)為參考與估計的重要依據。 2.3 姿態變化 討論姿態變化時,定義p、q、r分別為角速度在體座標三個方向的分量。 2.3.1 尤拉角座標轉換 討論火箭姿態時,一般會以尤拉角進行描述,為體座標系與發射座標之間三 個方向旋轉的相對角度,為免與速度的方向角ψ 混淆,在此用 ( , , )φ ψ θE 表示,計 算時會將原點重合,過程如下: 一、固定X 軸,以L X 為軸心旋轉L φ 角,使旋轉後的 ' L Y 投影在Yb− 平面上,經Zb 過這次旋轉,定義此時座標軸為 ' ' ' L L L X −Y −Z 。 二、固定 ' L Z 軸,以ZL' 為軸心旋轉ψE角,使旋轉後的YL''與Y 重合,經第二次旋b 轉,定義此時座標軸為 '' '' '' L L L X −Y −Z 。 三、固定 '' L Y 軸,以YL''為軸心旋轉θ角,將剩餘兩軸與體座標系重合,經三次旋 轉後發射座標將完全與體座標相同,座標定義為 ''' ''' ''' L L L X −Y −Z ,如此便能以出三 個尤拉角來計算目前體座標的型態。經由三次旋轉後,可以依序推得轉換關係式
為: ' ' 1 ' 1 0 0 0 cos sin 0 sin cos L L L L L L L L L X X X Y Y T Y Z Z Z φ φ φ φ = = − '' ' ' '' ' ' 2 '' ' ' cos sin 0 sin cos 0 0 0 1 L E E L L L E E L L L L L X X X Y Y T Y Z Z Z ψ ψ ψ ψ = − = ''' '' '' ''' '' '' 3 ''' '' '' cos 0 sin 0 1 0 sin 0 cos L L L L L L L L L X X X Y Y T Y Z Z Z θ θ θ θ − = = 最後可得到發射座標與體座標之間的轉換矩陣為: ''' '' ''' '' 3 2 1 ''' '' L L b b L L b L L X X X Y Y T T T Y Z Z Z = = (2.14) 2.3.2 尤拉方程式 物體的角速度分三軸可定義為: b b b p X qY r Z ω= + + (2.15) 若利用尤拉角的變化率可改寫為: ' '' L b E L X Y Z ω φ= +θ+ψ (2.16) 由2.3.1的推論可得到: '' sin cos L b b Z = − θX + θZ ' '' ''
cos sin cos cos cos sin sin
L E L E L E b E b E b
X = ψ X − ψ Y = ψ θX − ψ θZ − ψ Y
將上兩式代回(2.16)式可整理為:
( cos Ecos Esin )Xb ( sin E )Yb ( sin Ecos Ecos )Zb ω= φ ψ θ ψ− θ + −φ ψ +θ + − ψ θ ψ+ θ
16 cos cos 0 sin
sin 1 0
cos sin 0 cos E E E E p q r φ ψ θ θ ψ θ ψ θ θ ψ − = − (2.17) 整理之後即為尤拉方程式:
sec cos 0 sec sin tan cos 1 tan sin
sin 0 cos E E E E E p q r φ ψ θ ψ θ θ ψ θ ψ θ ψ θ θ = − (2.18) 2.3.3 四元素方程式 四元素是另一種用來描述尤拉角的方式[8],在尤拉方程式中,有著正切與 正割函數,在角度為零度時可能無法定義,但在時做要求下會希望某些角度固定 為零度,在計算上必須以另一個方式進行,我們常常定義四元素( , , , )e e e e 來0 1 2 3 定義尤拉角,如下所示:
0 cos cos cos sin sin sin
2 2 2 2 2 2
1 cos cos sin sin sin cos
2 2 2 2 2 2
2 cos sin cos sin cos sin
2 2 2 2 2 2
3 sin cos cos cos sin sin
2 2 2 2 2 2 E E E E E E E E e e e e ψ θ φ ψ θ φ ψ θ φ ψ θ φ ψ θ φ ψ θ φ ψ θ φ ψ θ φ = + = − = − = + (2.19) 四元素與角速度之間的關係式如(2.20)所示: 0 1 2 3 1 0 3 2 3 0 1 2 2 1 0 3 1 2 e e e e p e e e e q e e e e r e e e e − − − − = − − (2.20) 因此尤拉角可透過四元素計算出來:
1 2 3 0 1 2 2 2 2 0 1 2 3 1 0 3 1 2 1 1 3 0 2 2 2 2 2 0 1 2 3 2( ) tan ( ) sin ( ) 2( ) tan ( ) e e e e e e e e e e e e e e e e e e e e φ ψ θ − − − + = − − + = − + = + − − (2.21) 先在(2.19)式求出初始值,再由(2.20)式得到( , , , )e e e e 變化率,利用(2.21)式就0 1 2 3 可以算出尤拉角。 2.3.4 旋轉運動方程式 假設載具為一均勻對稱之圓柱體,受到力矩後的運動方程式如下: ( ) ( ) ( ) y z x x x y z x y y x y z z z qr I I M p I I M rp I I q I I pq I I M r I I − = + − = + − = + (2.22) 其中M 、x My、M 代表體座標下三個方向的力矩,z I 、x Iy、I 為體座標下三軸z 的轉動慣量,將氣動力與推力產生的力矩找出後,根據旋轉運動方程式及尤拉方 程便可得到火箭的飛行姿態。 2.4 氣動力模型 在大氣層中飛行的火箭必會受到空氣阻力影響,空氣會產生阻力以及力矩干 擾載具穩定飛行,為了模擬出大氣阻力對載具的影響,我們必須先獲得載具當時 飛行的馬赫數以及各種姿態角如圖2.12,接著在六個自由度上皆模擬出受力的方 程式如(2.23)式。
18 2 2 1 2 1 2 F V CS M V CLS ρ ρ = = (2.23) 其中ρ 代表當時空氣密度,V 是載具速度,C 為空氣阻力係數,S 是參考面積, L為參考長度,F及M則代表受力與力矩。 圖 2.12 體座標下各種角度定義 氣動力所產生的力量可由在受力的三個方向上,我們在體座標的三個方向得到各 個係數如下: ( , ) ( , ) ( , ) sin ( , ) sin Aon c fx Aoff c fy N c fz N c C M C C M C C M C C M α α α φ α φ − = − = − = − (2.24) A C 、C 為氣動力係數,本節中的N φ 非尤拉角,定義如圖2.12,將上式代回(2.23), 得到載具受力如(2.25)式: 2 2 2 1 1 1 2 2 2 x fx y fy z fz F = ρV C S F = ρV C S F = ρV C S (2.25) 同樣的在轉動上,空氣也在體座標上有不同的作用力矩,同樣在三個座標下得到 係數如下:
0 [ ( , ) ( , )]co s [ ( , ) ( , )]sin mx my m c CG N c mz m c CG N c C C C M X C M C C M X C M α α φ α α φ = = + = − − (2.26) CG X 為火箭質心位置,而C 及m C 為氣動力係數,將(2.26)式代回(2.23)式可得到N 載具受力矩如(2.27)式: 2 2 2 1 1 1 2 2 2 x mx y my z mz M = ρV C SL M = ρV C SL M = ρV C SL (2.27) 由(2.25)式及(2.27)式可得到氣動力造成的載具受力情形。 2.5 火箭推力 火箭推力來自後方噴嘴,並且有一定的轉動幅度用以控制,用燃料產生的推 力向量來計算火箭飛行之受力與力矩。而火箭燃料的燃燒效率由Isp計算,定義 為: 0 sp T I g m = (2.28) 0 g 為海平面的重力加速度,m 為質量減少速率,質量減少越多表示燃燒量越大, 推力也就跟著越大。 另一個影響火箭效率的為燃料比率,定義為該階段燃料質量占該節火箭質量 的比例,同樣的,燃料比率越高,推進效率也會越好。
20
第三章 載具設計
火箭的設計大致上可分為兩部分,物理參數設計及控制時間的設計,這兩部 分決定了後面章節應該如何設計控制系統以期穩定。由於國外已有許多發射成功 之案例,如美國的泰坦系列、俄國由R7發射器改良的火箭以及中國的長征系列 [3][4][5]。其中參考日本Mu-3-S-II發射載具[6],其三階段飛行的情形如圖3.1。 圖 3.1Mu-3-S-II 入軌情形[6]此火箭為日本成功入軌的衛星載具,繞行在約在五百公里之圓形軌道,最後再修 正為橢圓,該飛行特點有以下三點: 一、第一階段共60秒,以重力轉彎的方式升空及轉向至40km左右之高空,脫離 空氣阻力最大之部份,巡航20秒後啟動第二階段。 二、第二階段令其穩定飛行,共飛行70秒,在推力即將結束時進行姿態的轉向, 由於此時已幾乎無空氣阻力,因此轉向幅度極大。 三、經巡航250秒後啟動第三階段,此時高度以及姿態已經將近其目標,維持高 度後進行加速,進行穩定的控制,此階段達90秒。 在大部分的案例來說,四階段火箭飛行時間的分布圖均大同小異,如圖 3.2 所示[7]: 圖 3.2 典型的火箭升空過程[7]
22 利用前兩節加速與升空,利用重力轉彎穩定轉向,並在第二階段進行大幅度轉彎。 中間第一次巡航時間較短,第二次則是重點爬高的階段,火箭也在此階段漸漸平 飛,因此巡航時間較長,而第三階段進行加速,且因重量輕加速極快。 在本文設計中,除了參考 Mu-3-S-II 入軌情形以外,並定義了一些基本任務 需求: 一、30kg 之負載。 二、距地表 300km 之圓形軌道運行。 三、Isp與燃料比率為 250 及 0.8。 3.1 物理參數的設計: 在TVC系統中,燃料的組成與重量影響發射效率極大,除了燃料所佔重量的 比例以外,便是燃料的燃燒效率Isp,而重量以實作來說,一定是希望越輕越好, 並找到最好的重量分布。 如任務需求所述,今考慮一發射載具與30kg的酬載,目標為距離地表300km 的高空圓形軌道,若以Isp及燃料比率為250及0.8較嚴苛的條件下,設計第三節火 箭外殼加上30kg酬載之總重和為120kg,因此該節火箭加上燃料之質量便已固定 為600kg。 第一、二節載具之質量則參考他國火箭之設計,第二節若高出第三節數倍, 增加第二階段的燃料比率,可將推進效益增加。而第一節則參考Mu-3-S-II,以 能將此火箭在60秒內得以升空至40km左右空氣較為稀薄之處為設計基礎,經計 算後設計整個火箭重量為28200kg。而這些重量在一、二節應該如何分配為最佳 比例,在此可以先做一個小測試,今載具重量固定為28200kg,燃料比率與Isp皆 不變,而第二、三節的比例由35%慢慢減少至15%,模擬並計算該30kg之酬載總 共獲得的能量,希望可以找到最佳的狀況。
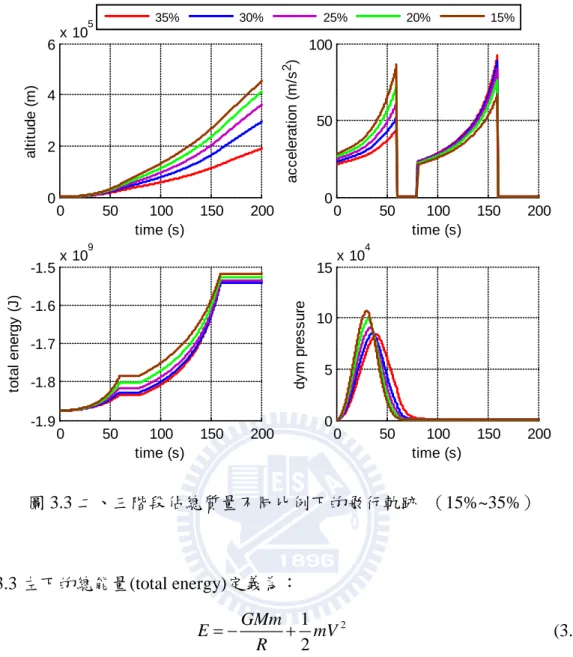
圖 3.3 二、三階段佔總質量不同比例下的飛行軌跡 (15%~35%) 圖 3.3 左下的總能量(total energy)定義為: 2 1 2 GMm E mV R = − + (3.1) 其中M為地球質量、m為 30kg 之酬載、R為與地心距離,而上式前項指的是酬 載在該位置對地球的位能,後者則為動能,當載具漸漸增加高度與速度時,位能 及動能都會增加。 在圖 3.3 中不同的五個重量比例,皆先控制令其穩定的重力轉彎,不做大幅 度轉向,由圖中可看出,若一、二節自由飛行後,獲得能量在二、三節重量比率 30%時有最少之值,35%時則回升獲得較多能量,在沒有推力的時候自由飛行, 因為能量守恆則沒有改變,若再提升至 40%時,由於第一節推力過小無法推動火 箭上升。 0 50 100 150 200 0 2 4 6x 10 5 time (s) al ti tude ( m ) 0 50 100 150 200 0 50 100 time (s) ac c el er at ion ( m /s 2 ) 0 50 100 150 200 -1.9 -1.8 -1.7 -1.6 -1.5x 10 9 time (s) tot al ener gy ( J ) 0 50 100 150 200 0 5 10 15x 10 4 time (s) dy m pr es s ur e 35% 30% 25% 20% 15%
24 將圖 3.3 模擬結果整理可列出表 3.1: 表 3.1 不同重量比例的能量獲得測試結果 利用表 3.1 之數據進行第一節火箭重量的選擇,若預期入軌高度大於 300km 時,以現有之 TVC 推力系統,可使用之重量比也就為總重扣掉二、三階段重量 和的 65~85%之間。而在這範圍內應該如何選擇,在增加轉向機制後便可慢慢看 出端倪,15%的情形無法達到 300km 軌道之需求,因此捨棄,從 20%~35%利用 第二階段之推力轉向後,使軌跡在進入第三階段前接近 300km,希望能能計算出 大幅度轉向後的能量耗損,接著模擬新的能量獲得情形如圖 3.4。 第二、三階段重 量和所佔比例 最大高度 (km) t=60 高度 (km) 酬載總能量 (kJ) 酬載獲得能量 (kJ) 與入軌能量差 (kJ) 15% 1316 48.3 -1518600 356600 621851 20% 1198 42.5 -1526700 348500 629951 25% 1006 36.8 -1536900 338300 640151 30% 728 31.0 -1542000 333200 645251 35% 336 24.6 -1535900 339300 639151
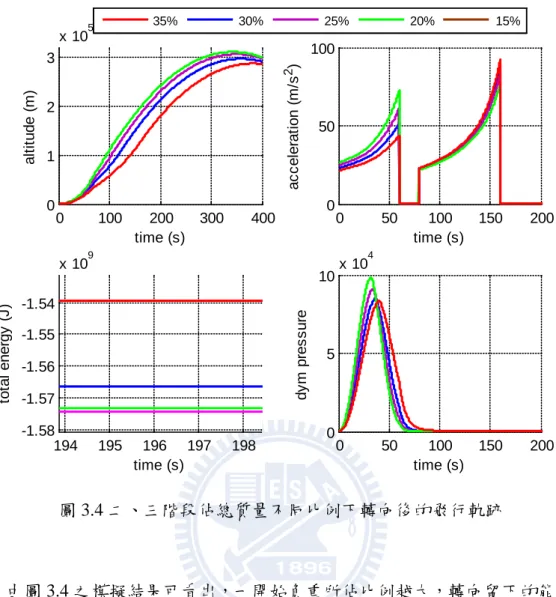
圖 3.4 二、三階段佔總質量不同比例下轉向後的飛行軌跡 由圖 3.4 之模擬結果可看出,一開始負重所佔比例越大,轉向留下的能量就 越多,如二、三節總重佔 35%的情況。而剛開始能量獲得較多的,在轉向後能量 取得反而較少,是因剛開始速度方向與轉向後的角度差距較大,需要能量修正之 故。但,其實不同重量分布所獲得能量的差異比率並不是很大,而圖 3.4 的模擬 也說明了這些重量比率都可以到達 300km 高空,既然差距不大,由軌跡來選擇 適合之重量分布會是較佳的做法。 二、三節質量總重 35%的情況下,在第一階段推進結束後高度僅 24.6km, 尚未離開大氣阻力較強的地方,無法符合要求,25%的情況在第一階段結束後就 有 60km 高度,至於 30%左右時在 Stage 2 點火前高度已經逼近 60km,兩者皆在 可接受之範圍,因此二、三節火箭之重量和應選擇在總重的 25%至 30%左右較 為理想。 0 100 200 300 400 0 1 2 3 x 105 time (s) al ti tude ( m ) 0 50 100 150 200 0 50 100 time (s) ac c el er at ion ( m /s 2 ) 194 195 196 197 198 -1.58 -1.57 -1.56 -1.55 -1.54 x 109 time (s) tot al ener gy ( J ) 0 50 100 150 200 0 5 10x 10 4 time (s) dy m pr es s ur e 35% 30% 25% 20% 15%
26 最後決定之火箭物理參數表 3.2:
Stage 1 Stage 2 Stage3 Total mass(kg) 28200 7700 600 Propellent mass(kg) 16400 5680 480 Isp 250 250 250 Mass ratio 0.8 0.8 0.8 Ignition time(s) t=0 t=80 待定 Burn time(s) 60 80 100 表 3.2 目標為海拔 300km 圓形軌道運行入軌的火箭物理參數 當然,若能增加燃料比率或是Isp,必能以更輕量的載具發射,但本文先以 此案例計算,目標是穩定入軌的設計。 3.2 時間參數的設計 第一階段與第二階段的初期因尚在空氣阻力較大之處,若有大幅度轉向使速 度與姿態之間差異過大,會造成火箭的不穩定,甚至翻滾或是受力不均而損壞, 為了降低攻角,此兩階段皆以重力轉彎為主,而在進入第二階段後段時,因為空 氣較稀薄,使得阻力減小,可以方便進行轉向計算高度讓衛星能夠入軌,因此第 二階段中後段開始會有轉向的控制,將俯仰角進行大角度的改變,進而改變加速 方向,讓第二階段結束後的自由飛行時能穩定爬升到軌道附近,而第三階段則主 要是精準控制將火箭定在一定高度。
圖 3.5 轉向時間示意圖 此發射載具之推力與時間分布如圖3.5所示,縱軸為推力大小,橫軸則為時 間,推力持續的時間已經固定,其中在第二階段的t1時進行火箭的轉向,目標是 在t=160時達到巡航的條件。 由(2.2)式及(2.13)式可知高度h及速度對地表切面的夾角變化情形: sin h=V γ
[
]
1 cos( sinT L) cos mgcos V
mV R
γ
γ= α+ µ− γ +
[
]
2
2 cos cos R cos cos cos sin sin sin
V ω ω τ ψ τ τ γ τ γ ψ + + + 而巡航條件為在第二階段開始巡航至進入第三階段啟動前,高度漸漸提高至接近 300km,且速度方向漸漸與地球切面平行,γ的變化在t1至t=160時以T、g、V 之 影響最大,160秒後則剩下g與V 對其產生較大的影響。 t1之計算會影響到火箭飛行的高度,越早轉向飛行高度越低,反之則越高, 計算上希望在點火之前速度方向及高度接近目標軌道,但因高度與γ並不是線性 關係,以及會有其他物理量的影響,會有一定的誤差存在,在t2及第三階段再行 較精準的控制。
28 在時間估計時,直接由實際模擬可得知,飛行時的γ 改變量大致上是線性, γ 可近似如圖3.6,因此可以直接計算其變化率,在進行轉向且仍有推力時,變化 率約為-0.0130(rad/s),而自由巡航時因推力消失,使得加速度降低,因此γ 改變 率也降為-0.0019(rad/s)m。 圖 3.6γ 變化示意圖 將此變化對高度積分得: 1 160 2 1 1 1 ( ) ( ) sin( t 0.013( )) t h t =h t +
∫
V γ − t−t d t 2 1 1 2 160 sin( 0.013(160 ) 0.0019(160 )) t t V γ t t dt +∫
− − − − (3.2) 其中h t 為轉向當時之高度,由(2.2)式及(2.13)式可算出這段時間會上升的高度,( )1 目標是在t2時γ 小且高度接近300km,但由於t1與t2未知,必須先假設t2=300,飛行 時電腦利用(3.2)式進行判斷,若現在轉向會使高度在t2略低於300km,且γ 仍為正 值時,即可進行轉向,最慢可以到γ 為負之前,這其中的區間皆為可行的轉向時 間點t1,一般來說會希望γ 角度誤差不在5度以上。 然而t1的誤差會在第三階段進行彌補,t2的選擇依然由自由飛行後當時狀態 決定,因第三階段有高度的精準控制,需要較長時間保持高度以入軌,會希望留下70%的時間進行校正高度,以持續燃燒100秒的第三階段來說,也就是大約30 秒要達到高度。 h t(2+30)=h t( ) 302 + ×Vsinγ (3.3) 滿足(3.3)式大於300km條件時則啟動第三階段。但若當初t1計算不夠精確,導致γ 太小無法達成(3.2)式之條件時便無法啟動。 因γ 與V 皆為漸漸遞減,若t1轉向時間計算過早,γ 在漸漸變小時會發現無 論如何達不到300km,便要提前啟動第三階段,啟動後便進行高度精準控制,但 也有可能因為t1的計算失誤而使得火箭無法在預期軌道入軌。在第三階段的精準 控制可以修正許多時間計算上的誤差,不論在本節的t1或是t2,於第四章會予以 介紹。
30
第四章 控制系統
4.1 火箭轉向控制器 4.1.1 重力轉彎 在第一階段及第二階段前段的發射會使用重力轉彎以減少攻角,進而減少空 氣阻力之影響,重力轉彎的導引如下: sin c g V θ θ = (4.1) 為了使火箭以這個轉向速率前進,設計了如圖 4.1 的控制器: 圖 4.1 重力轉彎控制方塊 將角速度回授後控制角速度的變化,在第一階段及第二階段前半段皆以控制角速 度為主,除了θ角變化率如(4.1)式以外,ψE及φ 之變化率則定為零。 4.1.2 大幅度轉向 第二階段後半段時因無空氣阻力,轉向為較大幅度,會利用角度控制。讓轉 向後的火箭直接朝平飛的方式加速,因此這階段的控制回授角速度及角度來控制 俯仰角。 2 2 a c c R R π θ = − − × π (4.2) a R 定義為射程,亦即將物體與地球最近之一點,與發射點在地表上畫出的弧長, 而R 定義為地球周長,我們利用控制俯仰角c θ的方式來改變火箭升空之姿態及加 速方向,使入軌時的γ 角為零度。若速度與姿態方向相同,θ控制至-90 度時,γ也會到零度,但因γ 為速度方向與地表平面之夾角,將地球想像為正圓球體,會 因在地球不同位置而改變。為控制角度變化設計如圖 4.2 的轉向控制器。 圖 4.2 進行轉向的角度控制方塊 以尤拉角及角速度回授,控制角度能達到(4.2)式的要求。 4.2 入軌前的精準控制 衛星經過前兩階段的導引及轉向後,飛到近 300km 的高空,但若只靠第一、 二階段之轉向並無法精準進入固定軌道,若要以正確角度以及高度航行,必須進 行速度方向及高度的控制。 一樣利用圖 4.2 的控制器,輸入訊號若維持像(4.2)式新的θ角作輸入訊號, 可以將γ 控制至極接近零度,速度方向會平行於地球表面,但卻無法對高度有精 準的要求,然而,若要對高度有更精準的控制,則必須增加一高度之回授給控制 器。由於高度的變化量由(2.2)式得知可表示為: h V= sinγ (4.3) 而在θ很小時又可簡化出線性關係: h=Vγ (4.4) 因此,根據高度及高度變化量的回授我們可以設計出一高度修正,該控制方塊如 圖 4.3 所示:
32 圖 4.3 新的θc計算 將目前高度與目標高度相減後之差距查表,得到期望的高度改變量hdesire, 如表 4.1; 表 4.1 預期的高度變化量 距目標高度(km) 預期的高度變化 距目標高度(km) 預期的高度變化 -20 400 +20 -400 -10 390 +10 -390 -5 260 +5 -260 -3 240 +3 -240 -2 220 +2 -220 -1.7 200 +1.7 -200 -1.4 180 +1.4 -180 -1.1 150 +1.1 -150 -0.9 130 +0.9 -130 -0.7 100 +0.7 -100 -0.3 60 +0.3 -60 -0.1 20 +0.1 -20 0 0
由表 4.1 查出預期的高度變化後,以實際高度改變量 h 回授,代入下式: ( desire ) f K h h V θ = − (4.5) 經過放大器後得到輸入訊號的改變量θf,因此輸入訊號改為: 2 2 a c f R π θ = − − × π θ+ c R (4.6) 由於已經固定高度,可以由速度的計算得到脫節時機,達到條件後便讓衛星脫離 自行繞行地球,速度的條件由向心力計算如(4.7)式: 2 2 GMm mV R = R GM V R = (4.7) 當速度值達到 GM R 時,第三節即進行脫節,使衛星在軌道上進行等速率圓周運 動。利用這方法做精準的高度控制,可以做出在不同高度下維持高度進行加速的 運動,只要轉向時間正確就能達到不同高度入軌的需求。
34
第五章 模擬結果與討論
以上述設計之火箭設定目標為海拔 300km 圓形軌道入軌結果,其中挑出入 軌與否的重點繪圖如圖 5.1。 5.1 軌道高度 300km 入軌模擬結果 5.1.1 入軌情形 未加誤差模擬結果: 圖 5.1 未加誤差的控制情形(高度、速度、仰角、尤拉角) 如圖 5.1 所示,約在 399.8 秒處滿足等速率圓周運動之條件,第三階段達到 速度要求,因此將衛星脫節結束控制。此時衛星的高度在圖 5.1 左上,海拔 300.02km,右上為速度 7732m/s,而左下圖為γ = −0.04°,誤差均不大。右下的 則是尤拉角,變化明顯的為俯仰角θ,其他兩個角度維持零度。 0 200 400 600 0 1 2 3 4x 10 5 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 0 200 400 600 -50 0 50 100 time (s) fpa ( deg) 0 200 400 600 -150 -100 -50 0 50 time(s) E ul er angl e ( deg)繞地運行情形: 圖 5.2 未加誤差入軌後繞地運行(高度、速度、經度、緯度) 0 2000 4000 6000 8000 10000 12000 2.85 2.9 2.95 3 3.05x 10 5 time (s) al ti tude ( m ) 0 2000 4000 6000 8000 10000 12000 7730 7735 7740 7745 7750 time (s) iner ti al v el oc it y ( m /s ) 0 2000 4000 6000 8000 10000 12000 -200 -100 0 100 200 time (s) longi tude ( deg) 0 2000 4000 6000 8000 10000 12000 -40 -20 0 20 40 time (s) lat it ude ( deg)
36 如圖 5.2 所示,衛星 成功繞地球飛行,雖在高度上有約正負 7km 左右的振幅, 但大致上以離地心近七千公里處,穩定得以近圓形的軌道運行,且經緯度的變化 也相當規律,約 6000 秒繞地球一圈。 若在計算時間處出現了誤差,高度控制器可以做一些小量的修正。 5.1.2 加上時間誤差 在第二階段的轉向時間 t1加上正負一秒誤差,由於轉向時間影響火箭平飛時 的高度,計算上若是出現誤差會使火箭飛行入軌的高度錯誤,因此,高度控制的 啟動便更加重要。圖 5.3 為在第二階段的大幅轉向時,增加轉向時間誤差正負一 秒不控制下自由飛行,其高度誤差可能會到達十公里。 圖 5.3 轉向時間誤差(-1s~+1s)自由飛行(高度、速度、仰角) 405 406 407 408 409 410 2.85 2.9 2.95 3 3.05 x 105 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 405 406 407 408 409 410 -0.6 -0.4 -0.2 time (s) fpa ( deg) -1s -0.3s +0.3s +1s
增加高度回授控制後的結果如圖 5.4 所示,誤差縮小到一公里上下,且仰角 誤差不到 0.1 度。因提早轉向(-1s)飛行高度較低,因此第三階段要等火箭飛 得更高後才啟動,所以在接近 407 秒時才加速完畢,仰角也開始固定,此外,四 個誤差情況下的速率值皆能達到進行圓周運動的要求。 圖 5.4 轉向時間誤差(-1s~+1s)高度回授控制飛行(高度、速度、仰角) 405 406 407 408 409 410 2.985 2.99 2.995 3 3.005 3.01x 10 5 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 405 406 407 408 409 410 -0.1 -0.05 0 0.05 0.1 time (s) fpa ( deg) -1s -0.3s +0.3s +1s
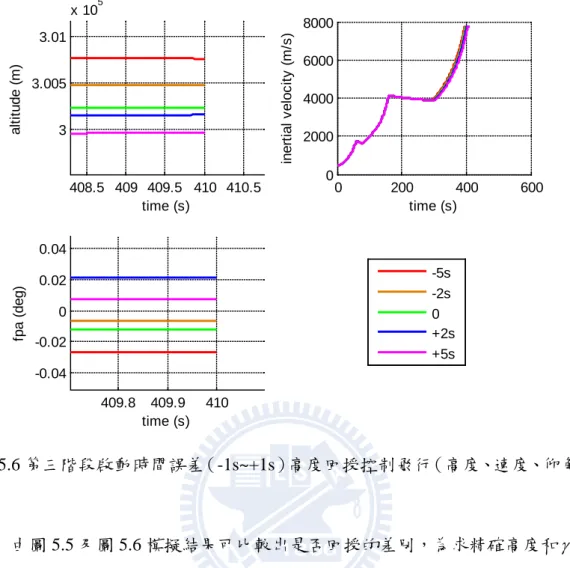
38 除了轉向時間的誤差以外,若在第三階段啟動時間 t2上加上正負 5 秒的誤差, 同樣會偏離原本預設的入軌高度,在加上誤差後自由飛行的模擬結果如圖 5.5: 圖 5.5 第三階段時間啟動誤差(-1s~+1s)自由飛行(高度、速度、仰角) 在圖 5.5 中,高度及γ 取即將入軌前的一小段時間來觀察,雖然左下圖的γ 維持 一定角度,但角度已經會使高度產生了變化,誤差可能到達四、五公里,且未能 穩定維持高度。透過高度回授仍能改善此種情形,在修正後的結果如圖 5.6 所示。 402 404 406 408 410 412 2.96 2.98 3 x 105 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 408.5 409 409.5 410 410.5 -0.4 -0.2 0 time (s) fpa ( deg) -5s -2s 0 +2s +5s
圖 5.6 第三階段啟動時間誤差(-1s~+1s)高度回授控制飛行(高度、速度、仰角) 由圖 5.5 及圖 5.6 模擬結果可比較出是否回授的差別,為求精確高度和γ , 仍然拿即將入軌的前一段時間來觀察,加上高度回授控制後皆能以不到一公里的 誤差平飛,且γ 的誤差也減少很多,不到 0.1 度,而速度在每個情況皆能達到要 求。因此,加上一個高度回授的控制器確實能夠使其穩定得以一定高度入軌。 408.5 409 409.5 410 410.5 3 3.005 3.01 x 105 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 409.8 409.9 410 -0.04 -0.02 0 0.02 0.04 time (s) fpa ( deg) -5s -2s 0 +2s +5s
40 5.2 以不同高度入軌的情形
為了討論該控制器是否只是在 300km 高空下的特例,因此利用二、三章所 述之設計法則,重新設計一可爬升至 400km 之發射載具如表 5.1:
Stage 1 Stage 2 Stage3 Total mass(kg) 42000 9000 600 Propellent mass(kg) 26400 6720 480 Isp 250 250 250 mass ratio 0.8 0.8 0.8 Ignition time(s) t=0 t=80 待定 Burn time(s) 60 80 100 表 5.1 目標 400km 高空的衛星物理參數 由於飛行高度較高,重量增加是必然的,重量分布同樣是以前述的軌跡觀測 來決定,與前例無太大差距,而燃料比率及I 皆與 5.1 節之例子相同,目標為利sp 用此載具以同樣的控制方式入軌 300km~400km 之間不同的軌道,並以圓形軌道 繞地飛行。因此,利用轉向時間點 t1的切換使飛行高度增減,以及高度回授來精 準控制入軌高度。
實際模擬情形: 圖 5.7 以不同高度入軌情形(高度、速度、仰角、尤拉角) 0 200 400 0 1 2 3 4 x 105 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 0 200 400 600 0 50 100 time (s) fpa ( deg) 0 200 400 600 -200 -100 0 100 200 time(s) E ul er angl e ( deg) 460 480 500 520 3.6 3.8 4 x 105 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 495 500 505 -1 -0.5 0 0.5 1 time (s) fpa ( deg) 0 200 400 600 -200 -100 0 100 200 time(s) E ul er angl e ( deg)
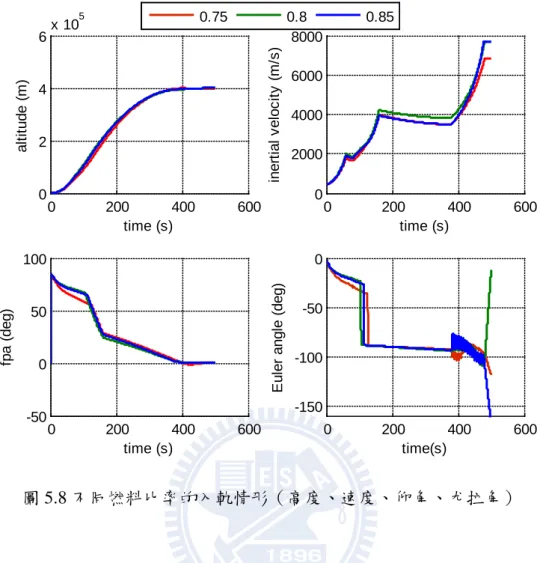
42 圖 5.7 的五個入軌情形,依序分別是目標為 400km、390km、380km、370km、 300km 的入軌情形,均可以不到一公里的誤差長時間飛行,γ 也在能接受的小角 度之內,不同入軌高度也有不同的速度要求,而本例中的速度也有因高度不同而 有不同的修正而成功入軌,其中右下角小圖的尤拉角部分,在控制結束後仍有剩 餘的角速度存在,因此會在第三階段脫節後有大的角度變化,但仍能控制衛星維 持穩定,此階段已不在討論範圍中。 飛行中途在第一節脫節後高度約在 60km 左右,可脫離大氣層空氣密度最高 處,而預期入軌高度越低者,其轉向時間 t1自然也就越早,而轉向後經過巡航進 入第三階段時,則以同樣的高度回授來控制平飛。利用控制可以使高度維持水平 飛行,而速度達到要求後脫節,故只要有能夠飛行至 400km 的載具,便能使他 在不同高度下入軌。 5.3 討論燃料比率及I 的影響 sp 5.3.1 不同燃料比率的模擬 利用前述之火箭物理參數設計方法,重新設計出三個類似的火箭,目標同樣 是海拔 400km 的軌道如表 5.2,三個火箭飛行的模擬結果如圖 5.8 所示: 表 5.2 三個不同燃料比率的火箭物理參數
Case 1 Case 2 Case 3
燃料比率 0.85 0.8 0.75 第一階段總質量 15000 42000 80000 第二階段總質量 4000 9000 20000 第三階段總質量 600 600 600 Isp 250 250 250 成功入軌 是 是 否
圖 5.8 不同燃料比率的入軌情形(高度、速度、仰角、尤拉角) 在本節中希望利用不同燃料比率來達到要求,圖 5.8 右下的尤拉角圖形同樣 在最後脫離時有正常的持續轉向,但從模擬結果右上速度圖形中可看出,當載具 之燃料比率為 0.75 的情況時,燃料用盡後的速度不足,並無法成功入軌,故以 目前燃料的I 條件下,火箭之燃料比率應當有個入軌與否的臨界值位於 0.75 至sp 0.8 之間,若要改進則將其中幾段增加其燃料比率便能改善無法入軌的問題。 5.3.2 入軌條件的臨界值與修正 從∆V 可以計算衛星是否能成功入軌,因衛星入軌與否與軌道上的速度有關, 速度需求如(4.7)式計算出的: GM V R = 0 200 400 600 0 2 4 6x 10 5 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 0 200 400 600 -50 0 50 100 time (s) fpa ( deg) 0 200 400 600 -150 -100 -50 0 time(s) E ul er angl e ( deg) 0.75 0.8 0.85
44 而軌道高度可用前述控制方法讓他達到要求,但載具加速是由 TVC 系統提 供加速度,必須有一定的條件才能達到,而考慮重力與空氣阻力可整理出加速情 形如(2.13)式:
[
]
2 1( cos sin ) cos cos sin sin cos sin
V T D mg R m α γ ω τ τ γ τ γ ψ = − − + − 在做入軌臨界值的推算時,因離心力與科氏力影響較小,先予以忽略,因此可改 寫如(5.1)式: T g D V V V V ∆ = ∆ − ∆ − ∆ (5.1) 將主要影響的前三項分開計算並透過積分可得到(5.2)式: co s ( ) ( ) ( ) sin ( ) ( ) ( ) T t D t V dt dt g t t dt m t m t α γ ∆ =
∫
−∫
−∫
(5.2) 要計算(5.2)式的加速效果時,必須先做一次模擬,以未能成功入軌的情形前兩階 段T、γ 、α與時間的關係紀錄,示意如下圖,且將其變化量分段近似為線性關 係: 圖 5.9 入軌條件計算的時間關係以四節火箭的推進來說,大致上的變化皆如圖 5.9 所示,其中,t1為轉向時間, 亦即在第二階段推進時的大角度轉向,然而,因為角度轉向大,需要花一些時間, 因此攻角達到最大值 t4會與轉向時間有一點差異,而 t4至 t2之間因為有加速攻角 下降的改變速度較快。 推進系統所給予的速度改變量 當α約等於零度時,如圖 5.9 前段,因進行重力轉彎攻角極小,(2.13)式可 簡化如下: sp I ( ) T i mg T V dt dt m t m mt ∆ = = −
∫
∫
sp 1 I i mg dt m mt = −∫
sp 0 1 I ( ) [ln( ) | ] Xm t m i mg m mt m = − = × × − sp I g [ln(mi) ln(Xmi)] = − × − sp I g [ln(1 X)] = − × − (5.3) 其中定義X 為該階段燃料所佔總重的比例。當α不等於零度時,也就是轉向之 後,根據(2.13)式,對速度有效者為一個餘弦值的分量,另一分量則造成速度方 向的改變,其中加速的部分需要透過積分計算: 2 1 2 4 ( ) /(t t ) α ω = α α− − 4 ( )t α α(t t ) α =θ +ω − cos ( ) ( ) T T t V dt m t α ∆ =∫
sp I cos ( ) i mg t dt m mt α = −∫
sp 4 I cos( ( )) i mg t t dt m mt α α θ +ω − = −∫
(5.4)46 重力所造成的速度改變量 同樣的,重力會因為速度方向而產生一個速度方向改變及正弦值的加速,一 樣要以積分計算,可推導如下: ( ) sin ( ) g V g t γ t dt ∆ =
∫
其中,透過圖 5.10,γ 的可分為三段的變化,以(ω ω ω 表示第一段重力轉γ1, γ2, γ3) 彎、第二段轉向後的加速、第三段的自由飛行的變化率: 1 2 1 1 2 3 2 2 1 3 3 3 2 ( ) /( 0) ( ) /( ) (0 ) /( ) t t t t t γ γ γ γ γ γ γ γ ω θ θ ω θ θ ω θ = − − = − − = − − (5.5) 空氣阻力所造成的速度改變量 空氣阻力的改變量仍為一積分函數,約在前 60 秒會有較大的值,之後空氣 稀薄處就幾乎為零不必計算,而力量的方向為朝向速度的反方向,因此不需計算 其他角度: ( ) ( ) D D t V dt m t ∆ =∫
(5.6) 1 2 3 1 2 1 1 2 2 1 3 2 2 0( tsin( ) t sin( ( )) t sin( ( )) )
g avg t t
V g θγ ωγ t dt θγ ωγ t t dt θγ ωγ t t dt
實例: 以 5.3.1 節中燃料比率為 0.75 未能入軌的衛星為例,欲在燃料比率或其他方 面上做一點改善希望其入軌成功,所作的分析如下; 重力部分: 為求出重力對速度影響,由圖 5.8 的第一次模擬結果,將γ 做一些簡單的近 似如圖 5.10: 圖 5.10 飛行仰角的變化圖 分析時,重力取海拔 0~400km 空中的平均值 2 9.24m s/ ,再利用圖 5.10 的變 化來求得重力對速度的改變量: 9.24 sin ( ) g V γ t dt ∆ =
∫
120 60 240 0 0 09.24( sin( ) sin( ) sin( ) ) 2 720t dt 3 240t dt 6 1320t dt π π π π π π =
∫
− +∫
− +∫
− 9.24 (114.5916 27.9623 56.2920) = × + + 1837.3(m s/ ) = (5.7) 重力造成之速度減少會是最大的,但能量會漸漸轉為位能儲存起來。48 空氣阻力部分: 圖 5.11 空氣阻力的模擬圖 圖 5.11 為一簡單的模擬,做出在全程中空氣阻力的大小,可明顯看出,僅 前 60 秒左右空氣阻力足以影響系統,經過簡單的近似為三角形後,可積分出空 氣阻力造成之速度改變為32.9(m s/ ) 經過簡單計算得到空氣阻力及重力對載具所造成的速度改變量,再利用(5.1) 式可推算出載具本身必須提供的總衝量,由於∆ = ∆V VT − ∆Vg − ∆VD,而載具跟 著地球自轉時,會因為角速度與半徑的關係而具有430(m s/ )的初速,而海拔高 度 400km 的軌道入軌時要求之速度約為7700(m s/ ),由(5.1)式計算可推得: 7700 430− = ∆ −VT 1837.3 32.9− 9140.2( / ) T V m s ∆ = (5.8) 0 50 100 150 200 250 300 350 400 450 500 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5x 10 4 time(s) F AB ( N )
為求推力造成之速度改變,仍然從圖 5.8 之模擬結果,將α與推力對時間關 係近似如圖 5.12: 圖 5.12 推力與攻角對時間的關係圖 以此未能成功入軌的例子,在不改變α及γ 對時間的關係前提下,必須維持 前兩段飛行的結果,而在姿態影響最小、加速卻最快的第三階段上進行改善,改 善方向可由燃料比率或是Isp進行。 由本例來說,第二階段之質量為原本總質量的 25%,此為第三章中所描述之 設計,而第三階段質量固定為 600kg,Isp也維持 250,總質量為 80000kg 之載具, 前兩階段之加速在積分後為4934.4(m s/ ),固定前兩階段之燃料比率為 0.75,以 此求第三階段需要的速度改變量。 . 3 9140.2 4934.4 4205.8( / ) T stage V m s ∆ = − = (5.9)
50 從燃料比率上改善: 根據(5.9)式可知第三階段飛行要有4305.8(m s/ )的速度改變,再從(5.3)式可 得到第三階段應該有的燃料比率: sp I (ln(1 )) T V g X ∆ = − × − ln(1 ) T sp V X I g ∆ = − − 1.8128= −ln(1−X) 0.8275 X = (5.10) 由(5.10)式之結果可得到燃料比率應改為 0.8275 以上才有可能正確入軌,因此在 新的模擬中,將第三階段燃料比率改為 0.83,前兩階段維持 0.75 入軌如下: 圖 5.13 改善燃料比率後的模擬結果(高度、速度、仰角、尤拉角) 由圖 5.13 看出前兩階段完全沒有不同,而第三階段由於燃料比率的提高,加速 變快,到達了入軌的速度要求,而高度與速度方向的誤差小,是一個成功改良的 結果。 0 200 400 600 0 2 4 6x 10 5 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 0 200 400 600 -50 0 50 100 time (s) fpa ( deg) 0 200 400 600 -150 -100 -50 0 50 time(s) E ul er angl e ( deg)
從Isp上改善: 同樣的利用(5.3)式,亦可從Isp上進行改善: sp I (ln(1 )) T V g X ∆ = − × − ln(1 ) T sp V X I g ∆ = − − 4305.8 ln(4) 9.81 sp I = × 316.6135 sp I = (5.11) 以Isp =330再做一次模擬: 圖 5.14 改善Isp後的模擬結果(高度、速度、仰角、尤拉角) 從此例中可看出,不論從燃料比率或Isp下手,皆可以增加加速能力,而Isp =330 的燃料在國外許多載具皆有使用,燃料比率達 0.9 以上也為常見,因此會是一個 合理的改善方案。 0 200 400 600 0 2 4 6x 10 5 time (s) al ti tude ( m ) 0 200 400 600 0 2000 4000 6000 8000 time (s) iner ti al v el oc it y ( m /s ) 0 200 400 600 -50 0 50 100 time (s) fpa ( deg) 0 200 400 600 -150 -100 -50 0 50 time(s) E ul er angl e ( deg)
![圖 3.5 轉向時間示意圖 此發射載具之推力與時間分布如圖3.5所示,縱軸為推力大小,橫軸則為時 間,推力持續的時間已經固定,其中在第二階段的t 1 時進行火箭的轉向,目標是 在t=160時達到巡航的條件。 由(2.2)式及(2.13)式可知高度 h 及速度對地表切面的夾角變化情形: sinh=V γ [ ]1 cos](https://thumb-ap.123doks.com/thumbv2/9libinfo/8618051.191261/37.892.159.730.114.515/間推時間已經固定其中在第二階段時進行火目標是式及地表切面夾角.webp)