行政院國家科學委員會專題研究計畫 成果報告
太陽能燃料電池混合動力直接驅動車之研發與展示--子計
畫二:太陽能燃料電池混合動力車動力、轉向與懸吊系統
之完全整合技術研發(3/3)
研究成果報告(完整版)
計 畫 類 別 : 整合型 計 畫 編 號 : NSC 95-2218-E-002-019- 執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立臺灣大學機械工程學系暨研究所 計 畫 主 持 人 : 劉霆 計畫參與人員: 碩士班研究生-兼任助理:陳昱達、郭仲軒、廖彥欣、吳建欣 處 理 方 式 : 本計畫可公開查詢中 華 民 國 96 年 10 月 14 日
國科會專題研究計畫成果報告
太陽能燃料電池混合動力直接驅動車之研發與展示-
子計畫二:太陽能燃料電池混合動力車動力、轉向與懸吊系統之
完全整合技術研發(3/3)
Complete Integration of Driving, Steering, and Suspension Systems for
Advanced Hybrid Vehicles with Solar & Fuel Cell Power
計畫編號:NSC 95-2218-E-002-019
執行期限:95 年 8 月 1 日至 96 年 7 月 31 日
主持人:劉 霆 副教授 國立台灣大學機械工程學系
計畫參與人員:陳昱達、郭仲軒、廖彥欣、吳建欣
碩士班研究生兼任助理 國立台灣大學 機械工程學研究所
Email: tliu@ntu.edu.tw
中文摘要 本子計畫配合太陽能燃料電池混合動 力車整車研發製作,針對全車之動力系 統、轉向系統、以及懸吊系統予以整合, 設計並發展全車完全控制之技術,並可以 為未來全車四輪驅動、四輪轉向、四輪獨 立主動控制懸吊系統之研究與發展。在三 年期的研發過程中,首先針對懸吊系統進 行選配與設計,並就懸吊系統、轉向系統 與全車物理性質,以及動力及轉向系統之 間的調和,利用數值分析模擬方法及軟 體,確認各項設計參數。第三年則是在於 考慮全車的操控性能,整合懸吊、四輪轉 向、動力系統並調校各項設計參數,並且 探討後輪轉向對行車的動態影響,並且發 展以整合懸吊、轉向、動力可以抑制車輛 翻覆的方法,以提昇車輛的安全。 關鍵詞:混合動力車、懸吊系統、後輪轉 向。 AbstractThis sub-project proposes an advanced concept on the integration of the driving system, the steering system, and the suspension system for the hybrid electric vehicle with solar and fuel cells. The goal of the integration of suspension, steering, and power/braking systems is to improve the handling characteristics and to achieve complete control of the vehicle through the additional control
variables, such as, the rear wheel steering angles, the driving torques of different wheels, the suspension forces. In this three-year project, we have completed the design of the suspension system according to the full car specifications, and undertaken the necessary design analysis and simulations. The full car dynamic characteristics have been derived, and the effects of the rear-wheel-steering have been studied. Based on the investigation developed in the study, an integrated control over the suspension , steering, and power has been proposed to prevent the vehicle roll-over.
Keywords: hybrid vehicle, suspension, rear-wheel-steering 一、緣由與目的 本子計畫配合太陽能燃料電池混合動 力車整車研發製作,針對全車之動力系 統、轉向系統、以及懸吊系統予以整合, 設計並發展全車完全控制之技術,並可以 為未來全車四輪驅動、四輪轉向、四輪獨 立主動控制懸吊系統之研究與發展。 對於車輛完全控制及系統動態分析與 數值模擬全車四輪驅動與轉向的概念用在 非道路車輛,如農業車輛上,早已有所紀 錄,對於四輪轉向之效果,亦可見有探討 [1~3],但是在道路車輛上,並不多見,但
大都是前後輪耦合式的轉向機構,如 1985 年代本田車廠所推出的 Prelude,再配合獨 立懸吊系統的整合形式。對於車輛全車的 動態分析,以建立數學模型予以分析,文 獻中有三輪與四輪的探討,[4~9],亦有以 目前進步日趨成熟的電腦數值模擬分析軟 體,如 ADAMAS(由 MSC 公司發行),來進行 車輛完整的分析與模擬。關於車輛的懸吊 系統及其控制的分析,以及各種懸吊具體 的描述可見於[4,10~13]。車輛以更多的控 制參數來達到主動控制概念的提出可見於 [14~16],車輛行駛狀態,例如側滑角度與 側向速度,可以被適當的予以調控。在本 研究中將以更多的控制參數,如後輪轉向 角、驅動力、懸吊參數調整等來達到將車 輛的行車狀態予以適當控制[17~19]。此種 完全控制概念亦即是本子計畫所發展的整 合系統之觀念。 在三年期的研發過程中,首先進行懸 吊系統的選配與設計、轉向機構的概念設 計,以及全車基本動態系統模型的建立。 針對太陽能混合動力車之特質,提出一可 行的設計構想,並且進行分析與模擬。計 畫第三年則是針對全車的操控性能予以探 討,對太陽能混合動力車的全車設計提出 完整的構想,整合懸吊、轉向、動力系統, 尤其是後輪獨立轉向控制條件,探討後輪 轉向對於車輛的穩態與發生翻覆的轉向行 為,發展適當的數學模式與進行模擬分 析,探討以及各項設計參數的影響。本子 計劃與其他子計劃間形成技術密集不可或 缺的合作關係,亦是為整車研發的關鍵計 劃。 本子計畫除了建立懸吊系統的設計方 法,完成太陽能混合動力車的懸吊系統的 設計、分析與模擬外,更進一步地發展整 合懸吊、轉向、與動力系統的方法,以後 輪獨立轉向來進行對全車動態性能的操 控,並且探討各項設計參數對車輛翻覆的 影響與抑止,可以有效地提昇車輛的操控 性與安全性。 二、太陽能混合動力車之底盤設計 本計畫之混合動力車,車輛特性設定為 一般轎跑車的性能以作為比較,具有足夠 的舒適性及運動性能。車輛的規格參數如 下: 車重 800kg 輪距 1500mm 軸距 2400mm 重心 全車 (2200,900,410.9357165) 前軸 (1000,900,313.741529) 後軸 (3400,900,514.4494538) 配重 50:50 本車的機構幾何條件設定如下: 輪胎尺寸 195/55 R15 大王銷長度、角度、位置 大王銷長度 = 290mm K.P.I. = 9° Camber = 0° Toe-in = 0° Caster = 4° 此混合動力電動車之懸吊系統的機構 設計目標,主要為有效的控制車輪之運動 及保持車輛運動之穩定性。主要以保持車 輛直進穩定性及良好的轉向操控性為主要 設計目標。保持車輛運動之穩定性部份, 係以起步及煞車時之穩定性(如 anti-dive、 anti-squat)及轉向時之穩定性為此懸吊機構 設計之重要考量。 2-1 懸吊機構之基本設計參數與設計分析 懸吊機構設計,先設定完整的車輛系統 特性參數及車身結構限制,以及特性參 數,並針對此混合動力車之車輛特性作一 設定。而轉向系統之設計經過回正力計算 與考量,各個前輪定位角作了修正調整, 獲得詳細精確的機構幾何設計條件,更要 考慮滾動中心之變化。 表 1 懸吊系統幾何尺寸 前懸吊系 統幾何尺 寸
z Roll Center Height 100mm z Fvsa Length 4000mm z Kingpin Length 250mm z UCA Length 245.855mm z LCA Length 286.085mm 後懸吊系 統幾何尺 寸
z Roll Center Height 140mm z Fvsa Length 4500mm z Kingpin Length 342.469mm z UCA Length 232.697mm z LCA Length 252.786mm
懸吊系統 圈狀彈簧+可變阻尼避震器 經過分析與考慮各項懸吊特性與全車 尺寸,本計畫提出一組懸吊設計參數,見 表 1 並以此懸吊系統作為分析建模的基本 尺寸。其幾何實體模型形狀,見圖 1∼5, 並且皆以 ADMAS 完成其運動學分析運動性 質變化等。 圖 1 全車底盤實體模型 圖 2 前懸吊系統實體模型 圖 3 前懸吊系統實體模型 圖 4 後懸吊系統實體模型 圖 5 後懸吊系統實體模型 除以 ADAMS 分析其動態性質外,更以 ANSYS 對前後懸吊系統,分析各個桿件的受 力情形,以確保零件之強度,見表 2 與 3。 表2 前懸吊系統應力分析 部位 最大應力(Mpa) 材料 降伏強度 (Mpa) 上控臂 114.8 (煞車) Al 6061 240 下控臂 198.2 (3G bump) Al 7075 500 大王銷 36.8 (3G bump) Al 6061 240 輪轂 21.6 (3G bump) Steel 345
車體連結 176.4 (轉向) Al 7075 500 表3 後懸吊系統應力分析 部位 最大應力(Mpa) 材料 降 伏 強 度 (Mpa) 上控臂 31.7 (煞車) Al 6061 240 下控臂 184.3 (3G bump) Al 7075 500 馬 達 外 側 殼 23.7 (3G bump) Al 6061 240 輪轂 33.4 (3G bump) Steel 345 車體連結 84.5 (煞車) Al 6061 500 2-2 轉向、煞車系統與車輪設計規格 與懸吊系統同時進行的有轉向系統與 煞車系統以及車輪的設定,經過反覆調整 修正後,基本設計參數的初步決定,以便 進行更進一步的細部設計,設計規格可見 於表4。 表4 轉向、煞車、車輪設計規格表 煞 車 系 統 四輪碟煞+ABS 前後煞車比 65:35 煞車力前 4405N,後 2395N 轉 向 系 統 齒輪齒條式+EPS 迴轉半徑 4m 輪胎 195/55 R15 輪框 15in,PCD 100mm,offset 38mm 針對於轉向系統,以全車規格,在比 較相似形式與尺寸車輛的要求,考慮車輛 空間的限制,以簡單力學分析, 決定轉向 系統的細項規格,見表5。並且依照此規格 進行細部設計。 表5 轉向系統細項規格 轉向系統規格 方向盤左右死點 圈數 3.2 圈 (1152deg) 最大齒條位移 158mm 減速比 0.127 內側輪轉角 58.5deg 外側輪轉角 40.5deg 最大方向盤輸入 力矩 53246Nmm 最大輸入切線力 266N 針對煞車系統,以全車規格,在比較 相似形式與尺寸車輛的要求,考慮車輛空 間的限制,以簡單力學分析, 決定轉向系 統的細項規格,見表6。並且依照此規格進 行細部設計。 表6 煞車系統細項規格 煞車系統規格 前輪 後輪 最大踏板力(N) 445 槓桿比 4.2 助力器比 1 總泵面積(cm2 ) 4 分泵面積 (兩活塞) (cm2 ) 20.4 15 制動效能因數 (兩 煞車片) 0.76 0.7 分泵直徑(cm) 3.6 3.1 碟盤有效半徑(cm) 12.5 10.4 輪胎半徑(cm) 30 30 總來令片數量 4 4 單輪煞車力(N) 2318.2 1306.2 單 輪 煞 車 力 目 標 值 (N) 2202.5 1197.5 踏板行程 (cm) 8.94 車輪的規格,採用相同大小的車輪規 格,可以較為簡化準備、採購、製作、測 試的過程。車輪的細項規格,並且依照此 規格進行輪圈的細部設計,見表7。
表7 車輪細項規格 輪胎及輪框規格 輪胎 195/55 R15 8kg 輪框 15 x 6.5 j PCD 100 offset 38mm 4.5kg 2-3 ADAMS 懸吊系統與全車數值模擬分析 本計畫的分析,大量的使用到 ADAMS 中的 Conceptual Suspension 模組針對懸 吊系統來進行運動分析與動態模擬,並且 進行懸吊系統設計尺度的變化,及判斷懸 吊系統的適用性,與設計參數趨勢分析。 以懸吊系統的阻尼係數為變化參數,除發 展簡單數學模式討論,各個參數的影響 外,更以 ADAMS 配合比對,至於被動式的 可調整懸吊參數值,也進行分析與比較。 同時也使用全車模型,見圖 6,來對全 車的設計參數進行分析,利用模擬結果針 對各個次系統進行檢討與比較。全車的懸 吊、轉向系統設計得以確認。 圖 6 ADAMS 全車懸吊系統模型 三、後輪轉向對車輛轉向行為之影響 此部分的研究整合轉向與懸吊系統, 主要在探討後輪轉向對於車輛穩態轉向行 為的影響。首先以運動學與牛頓力學理論 為基礎,建立幾何關係式和力平衡方程 式,發展四輪轉向車輛模型,完整考慮四 輪獨立的側滑角度、正向負載轉移,及使 用接近真實輪胎性質的Magic Formula 輪 胎模型。由於方程式相當複雜,將採用數 值分析方法,並配合全域搜尋求得數值 解,可求得在不同轉向角及車速下,各輪 的側滑角、正向力、轉向力及全車穩態之 性質。利用此模型針對單後輪轉向與雙後 輪同步轉向兩種模式,分析後輪轉向對於 車輛穩態轉向行為的影響。最後提出操控 後輪轉向以調整車輛轉向特性的方法,並 以四輪的側滑現象來評估比較各種後輪操 控的方式。 3-1 四輪轉向車輛模型 首先建立四輪獨立轉向角之幾何關係 式,再依據四輪車輛自由體圖的受力情 形,以牛頓力學理論與車輛穩態行駛的假 設,推導出車輛穩態轉向之力平衡方程 式,檢視車輛在運動的切線方向、法線方 向力平衡,與繞重心的偏擺力矩平衡,發 展四輪轉向車輛的運動模型。 V Ω B L 1 α 2 α 3 α 4 α 1 δ 2 δ 3 δ 4 δ x y t n ( , ) C C C I x y G R G C β O R O G path of C 1 θ 2 θ 1 P 2 P 3 P 4 P 圖 6 四輪轉向車輛之運動模型 如圖 6 所示,四輪各有獨立控制的轉 向角分別為δ1、δ2、δ3、δ4,定義車 輪滾動方向與車輛縱向的夾角為轉向角, 順時針方向為正值。當車速為 V 時,四輪 產生的側滑角分別為α1、α2、α3、α4, 車輪側滑角定義為車輪滾動方向與車輪速 度方向的夾角,順時針方向為正值。 Co 點為車輛中心,視為(x , y)座標系 統的原點,x 軸代表車輛縱向,y 軸代表車 輛側向,重心 CG 座標值為(xG , yG),前 後輪距相等,輪距為 B,軸距為 L,而右前
輪位置 P1 座標值為(x1 , y1),左前輪位 置 P2 座標值為(x2 , y2),右後輪位置 P3 座標值為(x3 , y3),左後輪位置 P4 座標 值為(x4 , y4)。穩態狀態下車輛過彎繞著 瞬心 IC 迴轉,(xC , yC),其中心運動路 徑為弧形虛線所表示。 以重心位置 CG 為參考點,依運動切線 方向與法線方向,建立(t , n)座標系統記 述四輪車穩態轉向運動狀態,此座標系統 將隨著瞬心位置的移動而改變。車身側滑 角β為車輛縱向方向與車速的夾角,順時 針方向為正值,當車輛直行時,此角度的 值為零。 迴轉半徑 RG 是瞬心 IC 到重心 CG 的距 離,車輛的偏擺角速度Ω為車速 V 與重心 迴轉半徑 RG 的比值,即Ω=V/RG。此外真 實迴轉半徑 RO 為瞬心 IC 到車輛中心 Co 的 位移。在不同轉向角設定時,車輛迴轉半 徑的變化,以及車速增加時迴轉半徑變化 的比較,將一致以真實迴轉半徑 RO 來討論。 在四輪轉向車輛的運動模型可知,四 輪轉向角δ1、δ2、δ3、δ4、四輪側滑 角α1、α2、α3、α4、瞬心 IC 位置(xC , yC)、車身側滑角β、重心迴轉半徑 RG 彼 此具有幾何關係。 四輪的轉向角δ1、δ2、δ3、δ4 通 常是可以被控制的,當作已知的輸入變 數,而四輪側滑角α1、α2、α3、α4、 瞬心座標 xC、yC、車身側滑角β、重心迴 轉半徑 RG 則是當車輛行駛時因應各種狀態 而產生變化的輸出變數。 側滑角的產生與車輪轉向力相關,而 且轉向力和側滑角之間為非線性的關係, 所以在四輪側滑角α1、α2、α3、α4 中 選擇α1、α2 為已知之變數,搭配δ1、δ 2、δ3、δ4 四個可被控制的變數,來描述 車輛的運動狀態。本節利用解析幾何的方 式,將六個狀態變數 xC、yC、β、RG、α3、 α4 由另外六個已知變數α1、α2、δ1、 δ2、δ3、δ4 來表示之。 若僅以四輪轉向角δ1、δ2、δ3、δ 4 來描述車輛運動狀態是不夠充分的,需要 增加兩個額外的變數以充分描述車輛的運 動狀態。藉由前輪轉向角δ1、δ2 和前輪 側滑角α1、α2 取代 xC、yC,利用(xC , yC) 取代 RG、β,並且由(xC , yC)分別搭配δ 3、δ4 取代α3、α4。以上六個變數 xC、 yC、β、RG、α3、α4 皆可由變數α1、α 2 來表示。 若可以藉由力學關係式求得α1、α2 的值,則車輛的運動狀態便可以充分被描 述。 首先以四輪受力的情況討論,輪胎分 別受到來自地面的外力為縱向力、側向力 和正向負載。縱向力與車輪的滾動方向同 向,如圖 7 的 Fx’1、Fx’2、Fx’3、Fx’ 4,在本研究為驅動力,提供車輛可以等速 過彎的條件。側向力則與驅動力方向垂 直,如圖 2 的 Fy’1、Fy’2、Fy’3、Fy’ 4,在此側向力即為轉向力,因為轉向力的 大小為輪胎側滑角和正向負載的函數,所 以還需要定義正向負載的大小。 四輪正向負載分別為 Fz’1、Fz’2、 Fz’3、Fz’4,因為穩態過彎時慣性造成 側向加速度的改變,四輪的正向負載也會 隨之變化,導致輪胎轉向力也會受到影 響,因此無法將之忽略。 '1 x F '2 x F '3 x F '4 x F '1 y F '2 y F '3 y F '4 y F x y t n G C O 1 α 2 α 3 α 4 α 1 δ 2 δ 3 δ 4 δ β 圖 7 四輪轉向車輛之自由體圖 假設四輪懸吊的彈簧係數 K 值皆相 同,前後輪和左右輪平均分配正向負載, 再利用俯仰和翻滾的力矩平衡關係式計算 四輪於穩態過彎時的正向負載,側向加速 度計算、四輪正向負載。由自由體圖可以 推導出四輪在 x 方向之合力 ΣFx、在 y 方 向之合力 ΣFy 和繞重心之合力矩 ΣMG,如
式(1)∼(3)所示,其中轉向力 Fy’j 為於 側滑角 αj 與正向負載 Fz’j 的函數即式 (1),dj 為重心到輪心的距離,ψj 為重心 到輪心的連線與 x 軸的夾角。 '1 1 '2 2 '3 3 '4 4 '1 1 '2 2 '3 3 '4 4
( cos cos cos cos )
( sin sin sin sin )
x x x x x y y y y F F F F F F F F F δ δ δ δ δ δ δ δ = + + + − + + + ∑ (1) '1 1 '2 2 '3 3 '4 4 '1 1 '2 2 '3 3 '4 4
( sin sin sin sin )
( cos cos cos cos )
y x x x x y y y y F F F F F F F F F δ δ δ δ δ δ δ δ = + + + + + + + ∑ (2) ( ) ( ) ( ) ( ) 1 '1 1 1 1 '1 1 1 2 '2 2 2 2 '2 2 2 3 '3 3 3 3 '3 3 3 4 '4 4 4 4 '4 4 4 cos sin( ) cos sin( ) cos sin( ) cos sin( ) G y x y x y x y x M d F d F d F d F d F d F d F d F ψ δ ψ δ ψ δ ψ δ ψ δ ψ δ ψ δ ψ δ = − − − + + + + − + − + − − + −
∑
(3) 將四輪在 x 方向之合力 ΣFx 與在 y 方 向之合力 ΣFy,經由座標轉換方法,轉換 至車輛運動的切線方向與法線方向,形成 在 t 方向之合力 ΣFt 與在 n 方向之合力 ΣFn,如式(4)、(5)所示,其中重心側滑 角 β 為 t 軸與 x 軸之夾角。 圖 8 為四輪 轉向車輛在運動切線方向之合力、法線方 向之合力與繞重心的合力矩。 ( )cos ( )sin t x y F = F β+ F β∑
∑
∑
(4) ( )sin ( )cos n x y F = − F β+ F β∑
∑
∑
(5) x y t n . . C G t F ∑ n F ∑ g M ∑ o β 圖8 四輪轉向車輛之動力分析圖 車輛在穩態定圓迴旋時,四輪在 t 方 向之合力為零,四輪在 n 方向之合力會等 於車身所產生的慣性力,慣性力值為 mΩV,而且繞重心的合力矩為零,其數學 式分別如(6)~(8)所示,即穩態力平衡方程 式。 0 t F= ∑ (6) = 0 n F − Ωm V∑
(7) 0 G M =∑
(8) 3-2 數值分析與模擬結果 由數學模型中可知車輛運動模型的幾 何關係式,以變數 α1、α2來表示另外六個 變數xC、yC、β、RG、α3、α4,得到式(6)~(11), 再以式(12)、(13)計算正向負載 Fz’j,最後 由側滑角αj與正向負載Fz’j以MF 輪胎模型 計算各輪轉向力Fy’j,最後利用力平衡方程 式(6)~(8)作為目標函數收斂,即可找到所 有的變數求解。 車輛參數設定的範例以不同配重的一 般轎車規格為基準,除了前後配重的比例 不同之外,車輛的重心位置左右對稱,車 重m、輪距 B、軸距 L 等規格皆相同,同 時三種車型皆使用相同的輪胎模型,車輛 規格如表8。 表8 三種配重車輛的規格表 車輛配重 說明 單位 F60R40 F50R50 F40R60 m (kg) 1500 L (mm) 2800 B (mm) 1500 Co(xo,yo) (mm,mm) (0 , 0) (0 , 0) (0 , 0) CG(xG,yG) (mm,mm) (280 , 0) (0 , 0) (-280 , 0) P1(x1,y1) (mm,mm) (1400,750) (1400,750) (1400,750) P2(x2,y2) (mm,mm) (1400,-750) (1400,-750) (1400,-750) P3(x3,y3) (mm,mm) (-1400,750) (-1400,750) (-1400,750) P4(x4,y4) (mm,mm) (-1400,-750) (-1400,-750) (-1400,-750) h mm 600 600 600 Cα MF Tire Model 四輪轉向角的設定,車輛以右轉的方 式穩態過彎,根據理想阿克曼轉向幾何計 算得到前輪轉向角為δ1、δ2,後輪轉向角 δ3、δ4皆為零,車速設定由3m/s 開始直到 任一輪的正向力小於零。 三種車型的瞬心座標皆隨車速增加而 向前移動,如圖9。 因為F60R40 車型瞬心位置隨車速增 加而向外移動;而F40R60 車輛的瞬心隨車 速增加而向內移動。當車速增加至某一定 值時,瞬心的縱座標會剛好與重心的縱座 標相同,此時的車身側滑角β 為零,此速 度為正切車速(Tangent Speed),參考 Milliken[20]。 F60R40 車型的迴轉半徑隨車速增加 而增加,呈現轉向不足的特性;F50R50 車型的迴轉半徑不隨車速增加而變化,呈現 中性轉向的特性;F40R60 車型的迴轉半徑 隨車速增加而減少,呈現轉向過度的的特 性,見圖10。 圖9 三種轉向角設定三種配重車輛的瞬心位置變 化圖 圖10 三種車型的迴轉半徑對車速的變化圖 三種車型的四輪側滑角皆為負值,且 其絕對值隨著車速增加所以離心力增大, 輪胎必須有更大的轉向力來平衡側向力, 四輪即相應產生更大的側滑角。 F50R50 車型的前輪平均側滑角值與後 輪平均側滑角值大約相等,而F60R40 車型 的前輪平均側滑角值大於後輪平均側滑角 值,F40R60 車型的前輪平均側滑角值小於 後輪平均側滑角值,可見圖11∼13。 圖11 F60R40 車型其四輪側滑角對車速的變化圖 圖12 F50R50 車型其四輪側滑角對車速的變化圖 圖13 F40R60 車型其四輪側滑角對車速的變化圖 3-3 後輪轉向對車輛穩態行為之影響 本研究以三種不同的後輪轉向模式, 觀察車輛於穩態轉向行駛中各參數的變 化,分別為瞬心位置、車身側滑角、迴轉 半徑、偏擺角速度、側向加速度、四輪側 滑角六個部份,探討後輪轉向對於車輛穩 態轉向行為的影響。 3-3-1後輪轉向模式設定 首先將後輪轉向分成單後輪轉向與雙 後輪同步轉向兩方面,探討後輪轉向對於 車輛穩態轉向行為的影響。後輪轉向模式 分類如表9。 表9 後輪轉向模式分類
外側後輪轉向(Outside Rear Wheel Steer,ORWS) 單後輪轉向
內側後輪轉向(Inside Rear Wheel Steer,IRWS)
雙後輪轉向 雙輪同步轉向(Dual Rear Wheel Steer,DRWS)
模擬使用F50R50 車型的車輛規格,如 表 8。轉向角設定以方向盤轉角 15°為輸 入,轉向減速比設為20。 (1) 瞬心位置分析 圖14∼圖 16 分別表示內側後輪轉 向、外側後輪轉向和雙後輪同步轉向對瞬 心位置的變化圖。
圖14 內側後輪轉向對瞬心位置的變化圖 圖15 外側後輪轉向對瞬心位置的變化圖 圖16 雙後輪同步轉向對瞬心位置的變化圖 當後輪轉向角相同時,後輪與前輪反 向,三種後輪轉向模式對瞬心位置向內移 動的程度而言,雙後輪同步轉向對於瞬心 位置向內移動的較多,外側後輪轉向其 次,內側後輪轉向最少,因為正向負載逐 漸轉移至外側後輪上,外側後輪提供的轉 向力增加,因此外側後輪轉向造成瞬心位 置向外移動更多。 (2) 車身側滑角分析 後輪與前輪反向時,車身側滑角減 少,後輪與前輪同向時,車身側滑角增加, 三種後輪轉向模式造成車身側滑角的變化 而言,外側後輪轉向造成車身側滑角的變 化最多,其次是雙後輪同步轉向,內側後 輪轉向最小,如圖17。 圖 17 車身側滑角對後輪轉向角的變化圖 (3) 迴轉半徑分析 F50R50 車輛在後輪轉向角為零的設 定下,迴轉半徑不受車速影響。後輪與前 輪同向時δ>0,迴轉半徑增加,反向時 δ<0,迴轉半徑減少,三種後輪轉向模式對 迴轉半徑的變化而言,外側後輪轉向造成 的變化最大,其次是雙後輪同步轉向,內 側後輪轉向最小,車速愈高此現象愈明 顯,可見圖18。 圖18 高速行駛下迴轉半徑對車速的變化圖 雙後輪同步轉向的迴轉半徑不隨車速 增加而變化,呈現轉向中性的特性。外側 後輪轉向在後輪與前輪同向時δ>0,迴轉半 徑隨車速增加而增加呈現轉向不足的特 性;同向時δ<0,呈現轉向過度的特性。內 側後輪轉向在後輪與前輪同向時δ>0,迴轉 半徑隨車速增加而減少,呈現轉向過度特 性;反向時δ<0,呈現轉向不足特性。 (4) 偏擺角速度分析 後輪與前輪反向時,偏擺角速度增 加,後輪與前輪同向時,偏擺角速度減少, 三種後輪轉向模式對偏擺角速度變化的效 果而言,外側後輪轉向造成偏擺角速度增
加的效果最大,雙後輪同步轉向其次,內 側後輪轉向最小。如圖19。 圖19 偏擺角速度對後輪轉向角的變化圖 (5) 側向加速度分析 相同轉向角下,三種後輪轉向模式的 側向加速度皆隨車速提高而增加。當後輪 與前輪反向時,側向加速度增加,同向時 側向加速度減少,外側後輪轉向造成側向 加速度變化的效果最大,其次為雙後輪同 步轉向,內側後輪轉向最小。如圖20。 圖20 側向加速度對後輪轉向角的變化圖 圖21 側滑角絕對值總和對後輪轉向角的變化圖 (6) 四輪側滑角分析 側滑角為車輪滾動方向與前進方向的 夾角,輪胎側向力愈大側滑角愈大,而側 滑角與輪胎磨耗有一定的正比關係,觀察 四輪側滑角亦可說明輪胎磨耗的程度。 在車速30KPH 以下,四輪側滑角絕對 值之總和在後輪轉向角為零時有最小值, 與低速行駛時的結果一致。在車速60KPH 時,三種後輪轉向模式的四輪側滑角絕對 值之總和相同。如圖21。 在時速90KPH 以上,後輪與前輪同向 時,迴轉半徑增加,四輪側滑角絕對值之 總和會減少,反向時,迴轉半徑減少,四 輪側滑角絕對值之總和會增加,三種後輪 轉向模式對四輪側滑角絕對值總和的影響 而言,外側後輪轉向造成四輪側滑角絕對 值之總和的影響最大,其次是雙後輪同步 轉向,內側後輪轉向最小。 由上述各參數的分析,可以歸納出後輪 轉向對車輛穩態轉向行為之影響,這些參 數變化皆以外側後輪轉向造成的效果最 大,其次是雙後輪同步轉向,內側後輪轉 向最小。 3-4 小結 一般常用的轉向剛性為定值之假設, 只適用於側滑角 4°以內與較小的側向加速 度。考慮正向負載轉移的情況,可以看出 內側輪轉向力有衰退之現象,車輛過彎所 需的轉向力主要由外側輪提供。因此模擬 結果更接近真實的行車情況,加上四輪具 有獨自的正向力、側滑角和轉向力分配關 係,針對每個車輪的變化也能有更精確完 整的了解。 後輪轉向對車輛穩態轉向行為之影響 分析如下。 (1) 後輪與前輪反向時,瞬心位置向前向 內移動,車身側滑角減少,迴轉半徑 減少,側向加速度增加;後輪與前輪 同向時參數變化會相反。而三種後輪 轉向模式造成這些參數變化的效果而 言,以外側後輪轉向造成的效果最明 顯,其次為雙後輪同步轉向,內側後 輪轉向的影響最少。 (2) 外側後輪與前輪反向時,迴轉半徑隨 車速增加而減少,轉向中性的車輛呈 現轉向過度;同向時轉向中性的車輛 趨向轉向不足的特性。 (3) 內側後輪與前輪反向時,迴轉半徑隨 車速增加而減少,轉向中性的車輛呈
現轉向不足;同向時轉向中性的車輛 呈現轉向過度的特性。 (4) 雙後輪同步轉向模式下,迴轉半徑皆 不隨車速增加而變化,轉向中性的車 輛仍維持轉向中性。 由後輪轉向對車輛穩態轉向行為之影 響分析,本研究提出操控後輪轉向來調整 車輛轉向特性的方法,可以使用在四輪轉 向車輛開發時,設計前後輪轉向角的配合 或調整車輛轉向特性的方法。 利用本研究所發展的模型與分析方 法,可以對四輪的側滑現象、正向負載轉 移、轉向力分配與後輪轉向對車輛行為的 影響,均可以有更完整的了解,可以在車 輛懸吊與轉向的設計發展過程中能夠具體 的瞭解全車的操控性能。 四、後輪操控對車輛翻覆之影響 此部分之研究在於整合懸吊、轉向、 動力系統探討車輛動態特性變化之間的關 係,並以操控後輪對車輛翻覆之影響。首 先建立九自由度全車動態數學模型,利用 基礎力學理論建立系統之運動方程式,並 配合電腦輔助模擬分析。接下來以 J-turn 進行模擬,觀察在不同前輪轉向角、車速 設定時,車輛是否翻覆。最後對即將翻覆 之車輛,進行外側後輪轉向、施加扭力、 轉向及施加扭力等操控模式,觀察對車輛 翻覆行為之影響。研究結果可得到不同外 側後輪操控模式對改變車輛動態特性之影 響,以及操控外側後輪以延遲或抑止車輛 翻覆的效果。 4-1 車輛動態數學模型 本研究所建立的數學模型是一個具有 九自由度的系統。將車輛假設為車身和四 個輪胎,分別考慮其重量,如圖22 所示。 其中車身的自由度包含縱向速度(u)、側向 速度(v)、偏擺角速度(γ)、側傾角(ψ)、俯 仰角(φ),四個車輪的自由度為輪胎在垂直 地面方向位移之自由度(z1~z4)。考慮輪胎 的彈簧係數、懸吊系統參數、每個輪胎之 轉向角、側滑角,以及地面與輪胎間正向 力對於輪胎側向力的影響。 此數學模型假設車身為剛體,輪胎的 彈簧和懸吊的彈簧、阻尼永遠垂直地面, 忽略空氣阻力、輪胎滾動阻力,並假設車 身重心、側傾、俯仰中心高度為定值。 s m 4 u m 2 u m 1 u m 3 u m φ γ ϕ 圖22 數學模型簡圖 輪胎模型採用Pacejka 的 Magic Formula 輪胎模型[21],並考慮輪胎驅動力 或煞車力對輪胎側向力的影響。當驅動力 或煞車力為零時,將輪胎側向力(Fymax)表示 為輪胎正向力、輪胎側滑角、輪胎側傾角 之函數。 以力平衡方程式分別計算車身在 x、y 方向與四個車輪在 z 方向之力平衡,以及 車身繞x、y、z 軸之力矩平衡。 Fx1~4為 1~4 輪之車輪縱向力,Fy1~4為 1~4 輪之車輪側向力,Fz1~4為 1~4 輪之車 輪正向力,f1~4 為 1~4 輪與懸吊間之作用 力,m 為車輛質量,ms為車身質量,mu1~4 為1~4 輪之質量,δ1~4為1~4 輪之轉向角, hs 為車身重心高度,hr 為車身側傾中心高 度,hp 為車身俯仰中心高度,Mγ-Fx、Mγ-Fy 為車輪縱向、側向力對車輛產生之偏擺力 矩,Mψ-Fy、Mψ-Fz為車輪側向、正向力對車 輛產生之側傾力矩,Mφ-Fx、Mφ-Fz為車輪縱 向、正向力對車輛產生之俯仰力矩,2t 為 輪距,Iγ為車輛偏擺慣性矩,Iψ為車身側傾 慣性矩,Iφ為車身俯仰慣性矩,Ixy、Iyz、Ixz 為車輛在XY、YZ、XZ 平面之慣性矩。 運 動 方 程 式 完 整 的 型 式 表 示 如 式 (9)~(17)所示。
(
)
1 1 2 2 3 3 4 4 1 1 2 2 3 3 4 4cos cos cos cos
sin sin sin sin
s s p x x x x y y y y mu m v m h h F F F F F F F F γ ϕ δ δ δ δ δ δ δ δ − − − = + + + − − − − && & (9) ( ) [ 1 1 2 2 3 3 4 4] 1 1 2 2 3 3 4 4
sin sin sin sin
cos cos cos cos
s s r x x x x y y y mv mu m h h F F F F F F F F γ φ δ δ δ δ δ δ δ δ + + − = + + + + + + + && & (10) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 1 1 1 1 1 1 1 1 1 1 2 2 0 u wh C a b K a b C t K t x m x C x K K φ φ φ φ φ φ φ φ ϕ + ϕ + + + + + − + − + − − = & & && & (11)
( ) ( ) ( ) ( ) ( ) ( ) ( ) 2 2 2 2 2 2 2 2 2 2 2 2 2 0 u wh C a b K a b C t K t x m x C x K K φ φ φ φ φ φ φ φ ϕ + ϕ + − + − + + + − + − + − − = & & && & (12) ( ) ( ) ( ) ( ) ( ) ( ) 3 3 3 3 3 3 3 3 3 3 3 2 2 0 u wh C a b K a b C t K t x m x C x K K φ φ φ φ φ φ φ φ ϕ− + ϕ− + + + + + − + − + − − = & & && & (13) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 4 4 4 4 4 4 4 4 4 4 4 2 2 0 u wh C a b K a b C t K t x m x C x K K φ φ φ φ φ φ φ φ ϕ− + ϕ− + − + − + + + − + − + − − = & & && & (14) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1 1 1 2 2 2 3 3 3 4 4 4 1 1 1 2 2 2 3 3 3 4 4 4
sin cos sin cos sin cos sin cos cos sin cos sin cos sin cos sin
xz yz x x x x y y y y I I I F a t F a t F b t F b t F a t F a t F b t F b t γγ φ ϕ δ δ δ δ δ δ δ δ δ δ δ δ δ δ δ δ − − ′ ′ = + + − ′ ′ + − + + − − ′ ′ + − + + ′ ′ + − − + − + && & && (15) ( ) ( ) ( )
(
)
( ) 1 2 3 4 1 2 3 4 xz xy s s r s r s s r r y y y y I I I m v u h h h h m g h h h F F F F t f f f f φφ γ ϕ γ φ φ − − + + + − − = − − + + + + − + −&& & && & &&
(16)
(
)
(
)
(
)
( ) ( ) ( ) 1 2 3 4 1 2 3 4 yz xy s s p s p s s p p x x x x I I I m h h u v h h m g h h h F F F F a f f b f f ϕϕ γ φ γ ϕ ϕ − − − − − − − = − + + + + + + + − − &&&& & & &&
(17) 由於數學模型相當複雜且為非線性,無 法求得解析解,故藉由數值方法求解,希 望以近似之數值解來探討車輛翻覆行為。 本研究之數值方法是將時間等分成多個微 小的時間點,分別計算每個時間點之加速 度項,再對速度項、加速度項積分得到下 一時間點之位移項、速度項,重複此步驟 即可求解。 4-2 車輛翻覆與 J-turn 模擬 車輛翻覆流程為四輪著地行駛,有一個 輪胎離地,接著兩個輪胎離地,然後重心 超過車輪與地面間支點與地面垂直之垂 線,最後車輛翻覆。 美國國家高速公路安全局(NHTSA)定 義任一車輪離地 2 英寸,即判定為車輛翻 覆,本研究因假設車身重心高度不變,若 模擬至車輪離地 2 英吋會產生誤差,故本 研究定義兩個輪胎離地時,即判定為車輛 翻覆。而在車輛翻覆過程中,由第一輪離 地至第二輪離地的時間則是用來作為車輛 翻覆的一項指標,也是利用後輪操控以判 斷對翻覆的影響的一項比較標準。 此研究採用使用混合動力車之參數,並 以NHTSA 規定之 J-turn 測試標準為基礎進 行車輛翻覆的模擬。 NHSTA 的 J-turn 模擬過程為一開始車 輛以等速前進,開始轉向時以 1000 deg/s 轉動方向盤至8δ0.3g,固定方向盤4 秒,接 下來 2 秒以等轉速將方向盤歸零,模擬結 束,前輪轉向角如圖23 所示。其中 δ0.3g為 側向加速度0.3g 時,車輛以穩態等速過彎 之前輪轉向角,8δ0.3g為8 倍的 δ0.3g前輪轉 向角。 圖23 J-turn 模擬之前輪轉向角 圖24 不同倍率前輪轉向角之內側前後輪離地時間 差與車速關係圖 為觀察前輪轉向角對車輛翻覆特性的 影響,進行前輪轉向角為 4δ0.3g與 2δ0.3g之 J-turn 模擬。因台大混合動力車之車身重心 高度相當低,車輛不易翻覆,故將車身重 心高度由原先的0.45 m 提高至 0.9 m,以利 觀察車輛之翻覆行為,模擬結果如圖24 所 示。當前輪轉向角為2δ0.3g時,因車輛不會 翻覆,沒有內側前後輪離地時間差。
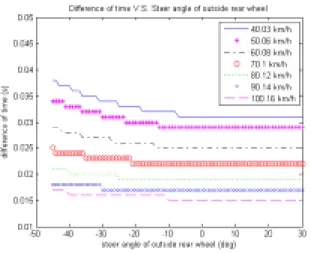
4-3 後輪操控對車輛動態翻覆特性之影響 當車輛有一車輪離地時,通常是內側車 輪,即開始操控外側後輪。外側後輪的操 控模式包括:(1)轉向,(2)施加煞車力或驅 動力,(3)轉向及施加煞車力或驅動力。將 記錄第二個車輪的離地時間以及其受到後 輪操控後的變化,以作為操控外側後輪之 後對車輛翻覆的影響。 4-3-1 後輪轉向之影響 因後輪轉向的角度越大,對車輛動態的 影響愈明顯,為觀察轉向對車輛動態之最 大影響,在本研究中,將外側後輪轉向設 定為步階後輪轉向。另外,若將外側後輪 轉向至車輪側滑方向,外側後輪側向力為 零,可觀察外側後輪突然失去側向力的影 響。 (1) 步階後輪轉向 當任一輪胎與地面間正向力為零時, 外側後輪開始轉向,外側後輪轉向角在 0.001 秒至設定值,設定值範圍為與前輪同 向30°至與前輪反向 45°之間。 模擬結果如圖 25~27 所示。無論外側 後輪與前輪同向或反向,皆可延遲翻覆時 間。與前輪同向是藉由減少偏擺角速度, 增加迴轉半徑,使翻覆時間延後;與前輪 反向,是藉由降低側向加速度,使翻覆時 間延後。 圖25 8δ0.3g步階後輪轉向之內側前後輪離地時 間差 圖26 4δ0.3g步階後輪轉向之內側前後輪離地時 間差 圖27 2δ0.3g步階後輪轉向之內側前後輪離地時 間差 (2) 零側向力 當任一輪胎與地面間正向力為零時, 將外側後輪側向力設為零。模擬結果如圖 28~30 所示。將外側後輪側向力設為零會使 車 輛 延 遲 翻 覆 , 甚 至 在 前 輪 轉 向 角 為 2δ0.3g,車速40.03 km/h 時,可以抑止車輛 翻覆,故此時沒有內側前後輪離地時間差。 圖28 8δ0.3g零側向力之內側前後輪離地時間差
圖29 4δ0.3g零側向力之內側前後輪離地時間差 圖30 2δ0.3g零側向力之內側前後輪離地時間差 4-3-2 後輪縱向力之影響 當任一輪胎與地面間正向力為零時, 對外側後輪施加驅動力或煞車力,在0.001 秒至定值。縱向力的設定由-3000 N 至 3000 N,以及驅動力和煞車力之最大值,其中負 值代表煞車力,正值代表驅動力,驅動力 和煞車力之最大值為外側後輪正向力和車 輪與地面間摩擦係數(0.9)的乘積。 圖31 8δ0.3g後輪施加縱向力之內側前後輪離地 時間差 圖32 4δ0.3g後輪施加縱向力之內側前後輪離地 時間差 圖33 2δ0.3g後輪施加縱向力之內側前後輪離地 時間差 模擬結果如圖 31 ~ 33 所示。對外側後 輪施加驅動力時,車輛會提前翻覆;施加 煞車力時,車輛會延後翻覆,甚至當前輪 轉向角為2δ0.3g時,對外側後輪施加500 N 的煞車力,即可抑止車輛翻覆。 4-3-3 後輪轉向及縱向力之影響 為探討外側後輪轉向及驅動力或煞車 力對車輛翻覆之最大影響,將外側後輪轉 向和驅動力或煞車力設定為瞬間達到定值 的步階轉向和步階驅動力或煞車力。 (1) 後輪轉向及施加驅動力 當任一輪胎與地面間正向力為零時, 將外側後輪轉向,同時對外側後輪施加驅 動力,轉向角及驅動力在0.001 秒轉向至設 定值。驅動力的設定為外側後輪正向力和 車輪與地面間摩擦係數的乘積。
圖34 8δ0.3g後輪轉向及施加驅動力之內側前後 輪離地時間差 圖35 4δ0.3g後輪轉向及施加驅動力之內側前後 輪離地時間差 圖36 2δ0.3g後輪轉向及施加驅動力之內側前後 輪離地時間差 模擬分析結果如圖34 ~ 圖 36 所示。外 側後輪與前輪同向,施加驅動力時,車輛 翻覆時間不變;後輪與前輪反向,施加驅 動力時,車輛會延後翻覆。 (2) 後輪轉向及施加煞車力 當任一輪胎與地面間正向力為零時, 將外側後輪轉向,同時對外側後輪施加煞 車力,轉向角及煞車力在0.001 秒轉向至設 定值。煞車力的設定為外側後輪正向力和 車輪與地面間摩擦係數的乘積。 模擬結果如圖 37、38 所示。外側後輪 與前輪同向,施加煞車力時,車輛會延後 翻覆;後輪與前輪反向,施加煞車力時, 車輛會提前翻覆,但當前輪轉向角為4δ0.3g 時,隨著外側後輪轉向角增加,車輛會延 後翻覆,甚至可以抑止車輛翻覆。 圖37 8δ0.3g後輪轉向及施加煞車力之內側前後 輪離地時間差 圖38 4δ0.3g後輪轉向及施加煞車力之內側前後 輪離地時間差 4-4 小結 操控外側後輪可以改變車輪與地面間 接觸力之大小與方向,亦可改變車輛的行 駛狀態,使車輛延後翻覆,甚至可以抑止 車輛翻覆。綜合不同外側後輪操控模式之 模擬分析,將結果整理如下:
1. 操控外側後輪轉向可分為與前輪同向 和反向兩種,兩者皆可延遲第二輪離地 時間。同向甚至可以抑止車輛翻覆,但 反向無法抑止翻覆。當兩者轉向角相等 時,反向的延遲時間較長。 2. 後輪與前輪同向時,會增加迴轉半徑、 減少偏擺角速度,使車輛翻覆延後;後 輪與前輪反向時,會減小迴轉半徑、增 加偏擺角速度,但因側向加速度降低, 亦可以延遲車輛翻覆。 3. 當車輛單輪離地時,若將外側後輪側向 力設為零,車輛仍會翻覆。 4. 對外側後輪施加驅動力時,會減小迴轉 半徑、增加偏擺角速度,使車輛更快翻 覆;施加煞車時,會增加迴轉半徑、減 少偏擺角速度,使車輛延遲翻覆,甚至 可以抑止車輛翻覆。 5. 外側後輪轉向及施加扭力,無法抑止車 輛翻覆,反而會提前第二輪離地時間。 6. 外側後輪轉向及施加煞車時,若後輪與 前輪同向,可以延遲第二輪離地時間, 但無法抑止車輛翻覆;後輪與前輪反 向,當後輪轉向角較小時,第二輪離地 時間會提前,但隨著後輪轉向角增加, 第二輪離地時間延後,甚至可以抑止車 輛翻覆。 7. 外側後輪煞車力為零時,後輪與前輪同 向比反向更可以抑止車輛翻覆;對外側 後輪施加煞車時,後輪與前輪反向比同 向更可以抑止翻覆。 五、結論 在三年期的研發過程中,首先完成懸 吊系統的選配與設計、轉向機構的概念設 計,以及全車基本動態系統模型的建立。 針對太陽能混合動力車之特質,提出一可 行的設計構想,並且進行分析與模擬。計 畫第三年則是針對全車的操控性能予以探 討,對太陽能混合動力車的全車設計提出 完整的構想,整合懸吊、轉向、動力系統, 尤其是後輪獨立轉向控制條件,探討後輪 轉向對於車輛的穩態與發生翻覆的轉向行 為,發展適當的數學模式與進行模擬分 析,探討以及各項設計參數的影響。 本子計畫除了建立懸吊系統的設計方 法,完成太陽能混合動力車的懸吊系統的 設計、分析與模擬外,更進一步地發展整 合懸吊、轉向、與動力系統的方法,以後 輪獨立轉向來進行對全車動態性能的操 控,並且探討各項設計參數對車輛翻覆的 影響與抑止,可以有效地提昇車輛的操控 性與安全性。 參考文獻(Reference)
[1] Sano, S., Furukawa, Y., and Shiraishi, S. (1986) ‘ Four Wheel Steering System with Rear Wheel Steer Angle Controlled as a Function of Steering Wheel Angle’ SAE Transaction, Vol. 94, pp. 3880-3893. [2] Abe, M. (1989) ‘ Handling
Characteristics of Four Wheel Active Steering Vehicles over Full Maneuvering Range of Lateral and Longitudinal Acceleration ’ 11th IAVSD SYMPOSIUM, pp. 1-14.
[3] Yoshimi, F., Naohiro, Y., Shoichi, S., Hideo, T., and Yoshinobu, M. (1989)‘A Review of Four-Wheel Steering Studies from the Viewpoint of Vehicle Dynamics and Control’Vehicle System Dynamics, Vol. 18, No. 1-3, pp. 151-186.
[4] Wong, J. Y. (1993) Theory of Ground Vehicles, 2nd Edition, John Wiley and Sons Inc, New York.
[5] Chang, C. N., and Lee, T. T. (1990) ‘Stability Analysis of Three and Four Wheel Vehicles ’ JSME International Journal, Series Ⅲ, Vol. 33, No. 4, pp. 567-574.
[6] Chang, C. N., and Ding, D. H. (1994) ‘Theoretical Stability Analysis of the Cornering Behaviour of Three- and Four-Wheel Vehicles ’ International Journal of Vehicle Design, Vol. 15, No. 3-5, pp. 301-317.
[7] Huston, J. C., Graves, B. J., and Johnson, D. B. (1982)‘Three Wheeled Vehicle Dynamics ’SAE Transaction, Vol. 90, 820139, pp. 591-604.
[8] Van Valkenburgh, P. G., Klein, R. H., and Kanianthra, J. (1982) ‘ Three-Wheel
Passenger Vehicle Stability and Handling ’ SAE Transaction, Vol. 90, 820140, pp. 605-627.
[9] Raman, A., Rao, J. S., and Kale, S. R. (1995)‘Overturning Stability of Three Wheeled Motorized Vehicles ’ Vehicle System Dynamics, Vol. 24, No. 2, pp. 123-144.
[10] Dixon, J. C. (1991) Tyres, Suspension and Handling, 1st Edition, University Press, Cambridge , London.
[11] Crouse, W.H., and Anglin, D.L. (1990) Automotive Mechanics, 10th Edition, McGraw-Hill Book Company.
[12] Sharp, R., and Crolla, D. (1987)‘Road Vehicle Suspension System Design-a Review’Vehicle System Dynamics, Vol. 16, No. 3, pp. 167-192.
[13] Hurdwell, R., and Pilling, M. J. (1993) ‘Active Suspension and Rear Wheel Steering Make Powerful Research and Development Tools’SAE Transaction, Vol. 101, pp. 67-77.
[14] Masaki, Y. (1991) ‘ Active Control Strategy for Improved Handling and Stability’SAE Transaction, Vol. 99, pp. 1638-1648.
[15] Iguchi, M. (1988) ‘A New Concept of Vehicle Dynamics Based on Active Control ’ JSME International Journal, Series Ⅲ, Vol. 31, No. 1, pp. 1-7.
[16] Matsumoto, N., and Tomizuka, M. (1992) ‘ Vehicle Lateral Velocity and Yaw Rate Control with Two Independent Control Inputs ’ Journal of dynamic systems, measurement and control, Tracsactions of the ASME, Vol. 114, No. 4, pp. 606-613.
[17] Yu, C. C., and Liu, T. (1997) ‘Strategies on the Full Control of Vehicle Handling ’ Bulletin of the College of Engineering, N.T.U, Oct, No. 71, pp. 91-106, 1997.
[18] Yu, C. C., and Liu, T. (2001)‘Full Control Modes of Three-Wheeled Vehicles with Zero Body-Sideslip angle and Zero Body Motions’ Proceedings of the Institution of Mechanical
Engineers, Part K: Journal of Multi-Body Dynamics, Vol. 215, No. K2, pp. 103-117.
[19] Yu, C. C., and Liu, T., “Full Control modes of four-wheeled vehicles with zero body-sideslip angle and zero body motions,” International Journal of Vehicle Design, Vol.38, No. 1, 2005, pp. 79-95. (SCI)
[20] William F. Milliken, Douglas L. Milliken, Race Car Vehicle Dynamics, Warrendale, PA, Society of Automotive Engineers, 1995.
[21] E. Bakker, L. Lidner, H.B. Pacejka, “A New Tyre Model with an Application in Vehicle Dynamics Studies, ” SAE Paper 890087, 1989.