1. INTRODUCTION
Maneuvering Target Tracking
Using I M M Method at
High
Measurement Frequency
JIIN-AN GUU
CHE-HO WEI, Senior Member, IEEE National Chiao l h g University Republic of China
In trcrelriqg a rrrrmcweriqg tprget by a radar system, the measurement mise is significantly correlated when the wpsluewnt Irrcpency is high In this pnper, a simpk decorrelation process is proposed to enhance the interact@ mrltiple modcl (IMM) algorilhm to track a manewer@ target with correlated masuremnt n o h It is 1 0 4 that (hc decorrel.(lon proecss nmy iroprovc system performance signillcantly, especially in velocity a d acceleration e s t i m e l i o ~
Manuscript received December 18,1989; revised August 8,1990. IEEE Log No. 44364.
Authors' address: Dept. of Electronics Engineering and Institute of EledroNcs, National Chiao lbng University, 75 Po-Ai St., Hsinchu, liwan, Republic of China.
001&9251/91/0500-0514 $1.00 @ 1991 IEEE
514 IEEE TRANSACTIONS ON AEROSPA
In tracking airborne or missile targets using noisy radar data, the measurement noise is usually assumed to be white and a conventional Kalman filter
is frequently used for tracking the nonmaneuvering target, If the target is maneuvering, a situation when the target is suddenly accelerated by the pilot or missile guidance program, the conventional Kalman filter should be modified to keep the tracking performance. There have been several approaches for this modification so far
[ M I .
Among them, the interacting multiple model (IMM) method[q
may provide rather good performance with efficient computation.The noises are autocorrelated within a bandwidth of typically a few Hertz [7,8]. When the measurement frequency is much lower than the e m r bandwidth, the successive errors are essentially uncorrelated, and can be treated as white noises. However, in many modem radar systems, the measurement frequency is usually high enough so that the correlation cannot be ignored. Rogers [8] treated the correlated noise as a first-order Markov process in the nonmanewering case. The noise can be decorrelated so that the conventional Kalman filter can work well after decorrelation. We extend this concept to the maneuvering case by deriving an efficient algorithm to decorrelate the measurement noise. It is found that significant improvement of the system performance can be obtained from the decorrelation process.
In practice, the measurement noises are not white.
II. PROBLEM FORMULATION
The target state is defined in the measurement vector (such as range, bearing and elevation in radar system) direction. Then, the tracking filter may work separately in each direction approximately. One singledirection operation is described in the following.
If the target is in a nonmanewering state, the target motion and the radar measurement can be modeled by a state with twodimensional vector
x k ( = [xx'lf) as follows.
x k + l = ' p x k
+
G W k (1)z k = H X k + V k (2)
where W k , V k , and z k are the process noise, the
measurement noise, and the measurement data, respectively.
is applied in (1) such that
When a maneuver occurs, an acceleration item Bu
&+I = ' p x k
+
B U+
G W k . (3)Tdcing the acceleration variable U as part of
the state vector, (3) and (2) can be described by
has been implemented king models of different dimension: a second-order model which is dominating when the target is in nonmaneuvering state and one or several third-order models for the maneuvering state with different process noise levels. At least one third-order model having larger process noise than the true system must be used to respond to the rapid change of acceleration at the time of maneuver initiation. N Kalman filters should operate simultaneously in the IMM algorithm, each of the filter corresponds to a modeL The probability of the
If
1%
A, the new measurement noise%
would be white, but it is correlated with the process noise w ; - ~ . By reformulating the dynamic equation (1) or (4) properly, the process noise can be made to be uncorrelated with the new measurement noise. In most practical system, this procedure can be omitted with little degradation in performance since the item G W : - ~ is usually smalL Thus, the IMM algorithm canbe applied to the case with correlated measurement noise by the following substitutions:
model being correct is evaluated from measurement H i - # ; v k d f i ; ; z k -Yk,
data and filter output. The weighted sum of all filter outputs with their probabilities being the weighting coefficients would be the overall system output. The
for i = 1,
&...,N.
(14) detailed working procedure is described in the [6,Appendix]. IV. SIMULATION RESULTS
In the following, an example is used to demonstrate the effect of the decorrelation process. Some Monte Carlo simulations with 50 runs in each simulation are performed. The position of the target is measured every T = 0.05 s. The target is generated to move with a constant velocity hitially. At time interval
k = [400,800], a constant acceleration U = 40 (m/s2)
is applied. After k = 800, the acceleration disappears and the target reverts to the constant velocity state. In the nonmaneuvering (constant velocity) periods,
Ill. DECORRELATION PROCESS
In the case that the measurement frequency is
high, the correlation in measurement noise cannot be ignored. Assume that the noise can be modeled as a first-order Markov process [SI given by
v'(t) = -Pv(t)
+
v(t). (6)In discrete-time form, we have
vk+l = x v k
+
vk (7)where A = e-PT, and vk is a white Gaussian noise. To decorrelate the measurement noise, a new measurement Yk, denoted as "artificial measurement" in [SI, is generated. Let
Xi,
@,
G', w;, andH'
denote the corresponding vectors or matrices in(l), (2), (4), or (5) for the ith model and
x
be the preset (estimated) value of noisecorrelation, then the measurement equation can be rederived as follows.the correlation coefficient is assumed to be ,l3 = 4 s-l
such that the noisecorrelation A = 0.8187 for T = 0.05 s. When the target is in maneuvering (accelerating) state, the bandwidth of measurement noise would increase. Assume that p = IO s-l in maneuvering period such that A = 0.6067 for T = 0.05 s. The process noise is assumed to be zero and the variance of the measurement noise is R =
1002
(m2). The coefficient matrices in (l), (2), (4), and (5) are given by$ =
[;
7 ;
H = [ l 01G m =
LPJ
120 : decorrelated 100- _ - - : undecorrelated 100
-
E L. 60 - C 0 m 2 2 4 0 - 2 0 - - : decorrelated - - _ : undecorrelated ~ 0 200 400 600 800 1000 1200D
8 0 - \ EE
6 0 --
w 2 f 8 40 20 - - 01 I 0 200 400 6 0 0 800 1000 1200k (in units of T = 0.05 sec.)
(b)
-"I
50: decorrelated _ - - : undecorrelated
0 200 400 6 0 0 800 1000 1200
k (in units of T = 0.05 sec.)
(4
Fig. 1. Performances (rms e m r ) of decorrelated and undecorrelated systems in IMM tracking method.
This target is tracked by the
IMM
algorithm with and without the decorrelation process, respectively. Let theIMM
algorithm be composed of three filters corresponding to a second-order model with no process noise, a third-model with the variance ofthe process noise Q and a thirdader model with no process noise, respectively. The selection of Q is a tradeoff between the performance in steady state and the transient error as the maneuver initiates. In this simulation, the parameter Q is selected to be
u2 (= &(m/s2)*). The transition probability matrix between the three models is given by
0.99 0.01 0.00
P
=[
0.33 0.34 0.33]
.
Fig. 1 shows the performance of the decorrelated (16)
0.00 0.01 0.99
(1
= 0.7) and undecorrelated(1
= 0) systems for this simulation. It can be seen that the decorrelated system has better performance than the undecorrelated system when the target is in the nonmaneuvering state or in the steady state of the accelerating period. In the nonmanewering period, the improvement due to decorrelation is rather significant, especially in velocity and acceleration estimations. These large improvements in velocity and acceleration estimations are particularly useful in some tactical applications such as threat evaluation, the computation of the time of flight of a hostile missile, etc.In Rg. 2, the steady state performances are shown as functions of the true value A and the preset value
X
of noise-correlation in nonmaneuvering and maneuvering periods, respectively. Consider the nonmanewering case first. If the measurement noise is strongly correlated and is at least partially decorrelated, the system performance will usually be enhanced significantly from the decorrelation process. And, the performance will be only minorly degraded whe the noise is overdecorrelated(1
>
A) besides a very large1
(e.g.,1
>
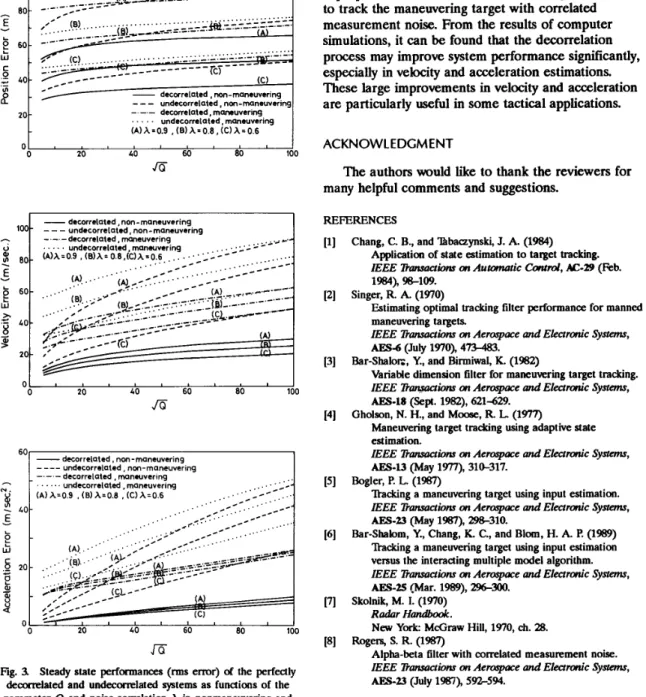
0.8) is used. In the maneuvering case, some advantage can also be cibtained by a proper decorrelation process but the improvement is generally not so significant as that in the nonmaneuvering case.Fig. 3 shows the steady state performances of the perfectly decorrelated
(1
= A) and undecorrelated(1
= 0) systems as a function of the parameter Q and noisecorrelation A. For A = 0.8, the improvements in position, velocity, and acceleration estimation in nonmaneuvering period due to decorrelation are about20-30 percent, 56-67 percent, and 74-78 percent, respectively, and about 6-8 percent, 30-33 percent, and 3444 percent, respectively, in the maneuvering period. The improvements are more significant for larger noisecorrelation A and are affected by some other parameters used in the simulations such as sampling time T, transition probability matrix P, etc. The process noise which is assumed to be zero above also dilutes the improvements. It should be noted that, if a large acceleration appears suddenly and a small parameter Q is used in the IMM algorithm, a large peak error would exist in the transient period and the decorrelated system may have larger peak error than the undecorrelated system. Thus, when the decorrelation process is employed, the parameter Q should be chosen properly (the same order of u2
or larger). In general, significant improvements can usually be obtained by applying the decorrelation
01 ' 1 " 1 ' ' ' ' 0.2 0.4 0.6 0.8 - h > 20t- I -
*
-
non-maneuvering-1
----maneuveringx
Fig. 2 Steady state performances (rms error) a s functions of true value X and the preset value 1 of noisecorrelation in
nonmanewering and maneuvering periods.
process to aid the IMM algorithm in tracking the maneuvering target at high measurement frequency.
V. CONCLUSION
We consider the tracking problem of the maneuvering target at high measurement frequency. The measurement noise is significantly correlated when the measurement frequency is high in radar
GUU & WEI: MANEUVERING 'JARGET TRACKING USING IMM METHOD 517
80 h E 2 60- c
2
40- Y -L I ; - ._B -
20 ... ... ..!A).-1
_,-,@A---, =---=. =.=:-1M=.zz.7:. z.z:-:= -. _._.-.__--
-.-.__ -
- -________---
- - - undecorrelated , non-maneuve6ng decorrelated, mamuvering (A1A;O.g , (B) A = 0.8, (C) A = 0.6 . . . undecorrelated , maneuvering 01 I I I I I 8 0 8 I RI 0 20 40 60 80 100 - decorrelated, non-maneuvering- - - undecorrelated , non- manewering 100- ( A )
.
lR\-
decorrelated, non-maneuvering undecorrelated , non-maneuvering decorrelated , manawering undecorrelated , maneuvering (A) X.O.9 , (B) A.O.8 , (C) A.0.60 20 40 60 80 100
Ja
Fig. 3 Steady state performances (rms e m r ) of the perfectly decmelated and undecorrelated systems as functions of the parameter Q and noisecolrelation X in nonmanewering and
maneuvering periods.
tracking system. A simple decorrelation process is proposed here to enhance the
IMM
algorithm to track the maneuvering target with correlated measurement noise. From the results of computer simulations, it can be found that the decorrelation process may improve system performance significantly, especially in velocity and acceleration estimations. These large improvements in velocity and acceleration are particularly useful in some tactical applications. ACKNOWLEDGMENTThe authors would like to thank the reviewers for many helpful comments and suggestions.
REFERENCES
Chang, C. B., and 'Eibaaynski, J. A. (1m) Application of state estimation to target tracking. IEEE Transactions on Automatic Conrrd, AC-29 (Feb. 1984), %109.
Singer, R. A. (1970)
Estimating optimal tracking filter performance for manned maneuvering targets.
IEEE Transaubm on Aermpace and Elearm'c Systems, AES-6 (July 1970), 473-483.
Variable dimension filter for maneuvering target tracking. IEEE Tranpctwm on Aerospace and Elecrronie Systems, B a r - S h a h , Y., and Birmiwal, K. (1982)
AES-18 (Sept. 19821,621629. Gholson, N. H., and Moose, R. L. (1977)
Maneuvering target tracking using adaptive state estimation.
IEEE Transactwm on Aerospace and Elecrronc Systems,
AES-13 (May 1977) 310-317.
Backing a maneuvering target using input estimation. IEEE T r a ~ ~ c t w m on Aerospace and Electronic Systems, AES-23 (May lW), 298-310.
Bar-Shalom, Y., Chang, IC. C., and Blom, H. A. P. (1989) ?tacking a maneuvering target using input estimation versus the interacting multiple model algorithm. IEEE Transactiom on Aerospace and E k x t m k Systems, AES-25 (Mar. 1989), 296-300.
Radar Handbook.
New York McGraw Hill, 1970, ch. 28.
Alpha-beta filter with correlated measurement noise. IEEE Transactions on Aerospace and Elcaronic Systems, Bogler, P. L. (1987)
Skolnik, M. I. (1970) Rogem, S. R. (1987)
AES-23 (July lW), 592594.
Jiin-An Guu was born in "hiwan, Republic of China, in 1955. H e received the
B.S.
and M.S. degrees in communication engineering from National Chiao n n g University, Hsinchu, 'hiwan, in 1978 and 1982, respectively.From 1982 to 1986, he was an Assistant Scientist for C h u g San Institute of Science and l?xhnology, 'hiwan. He is now a Ph.D. candidate in the Institute of Electronics, National Chiao "brig University. He majors in radar system, communication system, digital signal processing, radar signal processing, and radar data processing.
Che-€Io Wei (S73-M7&M79-SM87) was born in 'hiwan in 1946. He received the
B.S.
and M.S. degrees in electronic engineering from National Chiao ?Lng University, Hsinchu, 'hiwan, Republic of China, in 1% and 1970, respectively, and the PhD. degree in electrical engineering from the University of Washington, Seattle, WA in 1976.From 1976 to 1979, he was an Associate Professor at National Chiao ?Lng University, where he is now a Professor in the Dept. of Electronics Engineering
& Institute of Electronics. He was the Chairman of the Dept. of ElectroNcs Engineering from August 1982 to July 1986 and Director of Institute of Electronics from August 1984 to July 1989.
Dr. Wei was the founding chairman of IEEE circuits and systems chapter in Ziipei. He is a Senior Member of I E E E His research interests include digital communication system, adaptive signal processing, and radar tracking.