國 立 交 通 大 學
電 機 與 控 制 工 程 學 系
碩 士 論 文
力輔助對增進人類運動感知能力之研究
A Study on Force Assistance for Human Sensor-Motor
Coordination
研 究 生:凃博翔
指導教授:楊谷洋 博士
中 華 民 國 九 十 六 年 七 月
力輔助對增進人類運動感知能力之研究
A Study on Force Assistance for Human Sensor-Motor
Coordination
研 究 生:凃博翔 Student:Po-Shung Tu
指導教授:楊谷洋 Advisor:Kuu-Young Young
國 立 交 通 大 學
電 機 與 控 制 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer and Information Science June 2007
Hsinchu, Taiwan, Republic of China
力輔助對增進
人類運動感知能力之研究
研究生:凃博翔
指導教授:楊谷洋博士
國立交通大學電機與控制工程學系
摘要
台灣高齡化社會已經來臨,要如何照顧日漸增加的老年人是已開發國家的重 大課題,感覺運動協調的能力會隨著年齡的增加而產生變化,這對老年人的生活 造成很大的影響,因此我們希望發展出一套有效的輔助訓練機制,可以改善或延 緩老人在運動感知區上的退化現象。在本論文中,我們觀察在不同的力感訓練機 制下,生理訊號與行為表現所產生的相對應變化,我們讓受測者在所建構的虛擬 環境中接受訓練,並評估力回饋輔助的作用,經由實驗結果的印證,力輔助系統 的確可以有效的幫助受測者有更好的運動協調表現。A Study on Force Assistance for Human
Sensor-Motor Coordination
Student: Po-Shung Tu
Advisor: Dr. Kuu-Young Young
Department of Electrical and control Engineering
National Chiao Tung University
Abstract
As Taiwan has entered the aging society, it is important to take good care of our elders. When people grow older, the sensor-motor area in the brain will be affected gradually. We thus intend to develop an effective training system that is helpful delaying the decline of the sensor-motor coordination capability. In the thesis, we analyze the behaviors and bio-signals through different training scenarios via
experiments. The subjects perform experiments in a virtual environment with (without) the help of the force reflection. The experimental results verify that the proposed force assisting system can enhance the capability of the subjects in their sensor-motor coordination significantly.
誌謝
首先感謝我的指導教授----楊谷洋博士,在這兩年的研究期間,由於他耐心 的指導,使我的碩士論文得以順利完成。同時,感謝口試委員們:曲在雯博士、 蕭得聖老師及楊秉祥老師撥冗參與論文口試,並給予許多寶貴的指導與建議,使 我獲益良多。感謝吳幸珍老師、蕭富仁老師、李淑珍老師、段正仁老師、梁勝富 老師、林進燈老師在實驗設計與分析方法上之建議,感謝曲博士成大的學弟特別 從台南上來教導我們抓取肌肉位置的方法,感謝我們的小組長君玲,由於你的努 力帶領才使得研究進度不斷的前進,感謝在統計上給予許多幫助的邱先生。感謝 協助進行實驗的組員:怡康、宗仁、志峰、尚文,開始接下計畫之後,每個星期 都花了許多時間在做實驗、分析資料、閱讀文獻、整理報告、以及開會,特別是 怡康跟宗仁,每做一次實驗總是花上 3 小時多的時間,真的很感謝你們的幫忙。 感謝 30 多位幫忙協助實驗的受測者,其中有許多是我認識的朋友,謝謝你們來 從事人體實驗。感謝又勳對於程式設計上的幫助與建議,因為你的協助讓我學到 不少東西。同實驗室的木政、一元、豪宇學長們、又勳、李政、哲儒、怡康,和 怡翔、宗仁、佑綸學弟們,電資大樓的德正、真如、依伶、孟修、明達、青甫、 玉潔、胖叔叔、柏銓,還有許多同學在研究上給我的幫助,在這兩年的實驗室研 究生活中,由於你們的陪伴讓我的生活更多采多姿。 最後要感謝的是我的家人以及我的朋友們,你們的關懷與支持使我能心無旁 騖的完成學業,家人的支持永遠都是我前進的動力。很高興自己在邁向人生另一 階段的關鍵時刻,有這麼多美好的回憶陪伴著我,我會將它好好珍藏起來,讓它 成為我最美麗的回憶。目 錄
中文摘要
I英文摘要
I I誌 謝
I I I目 錄
I V表 目 錄
V I圖 目 錄
V I I 1.導論...1 1.1 研究背景...1 1.2 Electromyography(EMG)...4 1.3 研究動機與研究方法...6 2.系統實現...12 2.1 力回饋系統...13 2.2 生理訊號量測...15 2.3 軟體實現...21 2.4 實驗場景與環境...24 3.實驗與討論...28 3.1 實驗一...28 3.1.1 實驗設計與方法...29 3.1.2 實驗流程...31 3.1.3 實驗結果與分析方法...353.1.4 改善與建議...42 3.2 實驗二...44 3.2.1 實驗設計與方法...45 3.2.2 實驗結果與分析...46 3.2.3 改善與建議...49 3.3 實驗三...51 3.3.1 實驗設計...52 3.3.2 實驗結果與分析方法...55 3.4 實驗結果整理...61 4.結論...63 4.1 未來工作...63 參考文獻...66 附錄...71 附錄1 實驗一流程與問卷...72 附錄2 實驗三流程與問卷...77
表目錄
表1.1 本論文使用之名詞...10 表2.1 力回饋搖桿規格比較...15 表3.1 實驗一改良前後之比較...30 表3.2 實驗一受測者資料...33 表3.3 輔助前後時間比...38 表3.4 轉彎速度跟直線速度之比較...39 表3.5 實驗二受測者資料...47 表3.6 三個實驗重要設計之比較...51 表3.7 實驗三受測者名單...53 表3.8 實驗三的行為資料整理...57 表3.9 k-S 檢定資料(針對常態分佈) ...59 表3.10 t-test 檢定資料(針對顯著性差異分析)...60圖目錄
圖1.1 力輔助訓練系統架構圖...7 圖1.2 實驗場景圖...8 圖1.3 場景軌跡、實際軌跡及軌跡偏移(Error)示意圖 ...8 圖1.4 力輔助示意圖...9 圖1.5 實驗建構的流程...9 圖1.6 系統流程圖... 11 圖2.1 系統硬體架構圖...12 圖2.2 力感操控系統控制流程...13 圖2.3 力回饋系統示意圖...13 圖2.4 力回饋搖桿 Impulse Engine 2000 ...14 圖2.5 二頭肌(biceps)肌肉位置 ...16 圖2.6 尺側伸腕肌、橈側伸腕長肌肌肉位置...17 圖2.7 量測 EMG 位置意示圖,圖片中為受測者之左手...18圖2.8 找尋尺側伸腕肌(Extensor carpi ulnaris)之過程 ...18
圖2.9 腦殼帽(64 通道)...19
圖2.10 腦波、肌電訊號阻抗值之示意圖...19
圖2.11 生理訊號放大器-Scan NuAmps2 Express system...20
圖2.12 紀錄頭殼形狀和 EEG 通道位置 (a)定位過程 (b)3D 定位器...20 圖2.13 實際所量得之 3D 頭殼圖...21 圖2.14 電腦繪圖之運算環境...22 圖2.15 圖學函式庫 OpenGL 成像流程...24 圖2.16 力回饋搖桿及其扶手...25 圖2.17 握取搖桿的位置...25
圖2.18 實驗場景圖...26 圖2.19 事件記錄點...27 圖3.1 實驗一架構圖...29 圖3.2 寬度 20 的走道...32 圖3.3 寬度 2 的走道...32 圖3.4 實驗一之流程...34 圖3.5 實驗一:受測者 4 號行為資料...36 圖3.7 實驗一:受測者 11 號行為資料...37 圖3.8 二頭肌、橈側伸腕長肌、與尺側伸腕肌的肌肉位置 及其在操控 軌跡球的EMG 訊號...40 圖3.9 EMG 在各 Event 中的平均 ...41 圖3.10 α 在各個不同轉彎點的值...42 圖3.11 軌跡偏移對應移動時間之關係圖(受測者 070330A)...43 圖3.12 軌跡偏移對應移動時間之關係圖(受測者 S070418N) ...43 圖3.13 限速球(紫色)與軌跡球(黃色)示意圖...45 圖3.14 實驗二:受測者 1 號行為資料...47 圖3.15 實驗二:受測者 2 號行為資料...48 圖3.16 實驗二:受測者 3 號行為資料...48 圖3.17 實驗三之概念圖...52 圖3.18 實驗三之流程...54 圖3.19 實驗三資料分析流程圖...56 圖3.20 實驗三受測者移動時間...58 圖3.21 實驗三受測者軌跡偏移...59 圖3.22 訓練前 vs.訓練後,過彎後最大 EMG 出現的時間 ...61 圖4.1 新實驗概念圖...64
第一章
導論
1.1 研究背景
老年化的社會已經來臨,因此如何照顧日漸增加的高齡人口,是已開發國家 的重大課題。醫學的進步,固然可以延長壽命,但是衰老卻是難以阻擋的趨勢, 感覺運動協調(sensory-motor coordination)會隨著年齡的增加而產生變化,對老 年人的平衡能力及穩定度影響很大[1],像是當人年齡大了以後,會出現手抖或是 控制力不好的情況,造成老年人在生活中的不方便。 在早期大家都會認為大腦的網路會隨著年齡的增加變得固定,然而,在過 去二十年中,大量研究已經揭示大腦從未停止改變和調整,依 Tortora 和 Grabowski 在 1996 年所定義[2],學習是透過指示或經驗獲得新知識或技能的能力,記憶是 知識隨著時間被保留的過程,所以即使神經元已經塑成,但是我們仍可利用外在 的訓練改變神經元[3],即所謂的可塑性,就是大腦長期經由學習而改變的能力。 那麼,大腦怎樣隨學習而改變呢?根據 Durbach(2000)理論[4],至少兩類修改 發生在學習中的大腦︰ 1. 在神經元內部架構方面的變化,最顯著的是在突觸區域內; 2. 在神經元之間的突觸數量增加。依據神經生理與解剖的研究指出,大腦皮質能做出調適,必要時在功能上和 結構上產生改變,功能上的改變,可由一個人在學習和從事複雜的工作得到證 實;同樣地,結構或是皮質神經的改變也在多數研究中證實[5]。在醫療、動作學 習、心理學以及復健的領域上,功能或結構上改變的研究是非常常見的,上述的 改變都可歸為是神經塑性(neuron plasticity),也稱為海伯可塑性(Hebbian Plasticity),也就是大腦根據新經歷而重組神經路徑的終身能力,如同我們在學習 時,我們是透過指示或經驗而獲得新的知識和技能,為了學習或者記住一個事實 或技能,在大腦裡會有持久性功能的變化。 神 經 可 大 致 分 為 中 樞 神 經 與 周 圍 神 經,前 者 是 人 體 生 理 活 動 的 指 揮 官,後 者 則 是 人 體 生 理 活 動 的 傳 令 兵,依 據 動 作 學 習 理 論,神 經 網 絡 系 統 的 建 立 與 塑 性,都 必 須 靠 不 斷 的 練 習 與 修 正,所 以,不 管 發 展 遲 緩 或 神 經 傷 病,都 可 藉 著 運 動 來 促 進 發 展、復 原 及 修 正 調 整,而 [5]提 出,神 經塑性(neuron plasticity)會在下列三種實驗方式發生變化:(1)藥物控制 (pharmacological agents),(2)刺激中樞神經(central nervous system)和周圍神經 (Peripheral nervous system),以及(3)動作訓練(Motor training)。
近年來所發展的神經復健(neurorehabilitation)多採用上述的方式,來探討 如何強化神經修補功能以及促進神經功能復原,並使用非嵌入式測量方法 (non-invasive functional imaging methods)來看塑性(plasticity)在腦內的變化[6]。 在非嵌入式測量方法中,近年來 EEG(electroencephalogram)已經被大家廣泛的 使用,從 1929 年起,腦波(EEG)為人們所認知[7],至 70 年代已陸續有基於腦 波所發展的簡易通訊與控制系統問世,到了今天,我們已經在軍事、醫學、電機、 以及資訊等領域看到相關應用[8-9];而神經復健的議題中[10],也不乏發現使用 EEG、EMG 和 fMRI 等生理訊號的方式觀察腦中塑性的變化。在運動塑性(motor plasticity)的研究中指出,EEG 不需要觀察小腦,而只需去觀察紋狀體(striatum)
和有關的運動皮層區(motor cortical regions),同時在實驗設計中需要有長時間的 訓練才可觀看出運動塑性(motor plasticity)的改變[11]。在中風病人復健的相關 研究中,也可觀察出康復情況良好時會發現 EEG 有變化,也證實中風病人可利 用復健來使神經復原(recover function)[12-14],故復健和運動塑性(motor plasticity) 的原理是相同的[15],因此,我們對於神經系統的多樣和可塑性的研究感到興趣, 希望可以研究出有效的改變神經塑性(neuron plasticity)的訓練方法,並改善老 人在感覺運動協調(sensory-motor coordination)的調節。 在復健相關的文獻中,[16]提出了利用力回饋手套進行復健輔助,並建構一 個虛擬環境,藉由遠端操控系統,來監控病患並幫助其進行復健,繼而將之運用 到中風病患身上,也見到成效[17];另一方面,視覺回饋的設計,會影響受測者 所感受到的力覺回饋[18,19],所以,在設計系統時,必須考慮視覺回饋對於力感 之影響;在[20]提到,中風病患患者使用機器人復健系統在做手部復健之時,讓 受測者用手畫出指定的圖形(例如正方形),藉由抓取患者的手部空間位置,給 予受測者適當力量的回饋,可以有效的幫助中風病患的前臂復健;文獻[21]也指 出,不只是畫正方形,也可以設計抓取的小遊戲,請受測者將他們的手放置在一 可移動之平台上面,控制小平台的移動,來抓取螢幕上指定的物品,透過力感之 間的互動,達到復健的功能;文獻[22,23,24,25]提出了各種復健機器人於復健上 之應用,包含了上肢、雙腿的復健,在此可以看到透過特定的訓練機制對於人類 的運動能力有一定的恢復作用;文獻[26,27]提出,透過一種稱為「隨機共振觸覺 回饋感受能力」的訓練機制,加入雜訊能提升對微弱振動信號之察覺,年輕的受 測者經由這機制,明顯提升對微弱訊號的感測,進而,將這觀念延伸至運用在老 年人跟中風患者,以及因糖尿病引起神經性病變的患者上,讓他們的觸覺感知能 力變的更加的敏銳。
復健從功能上可以分成兩類,一種是在著重於感知能力上之復健(sensor), 另外一種則著重在運動能力上之復健(motor)。諸如[16,20,21,22,23,24,25]皆是著 重於運動能力上之復健,而[26,27]則是著重於感知能力上之復健。若以復健器之 驅動方式來分類,主要可分為主動式與被動式[40],主動式復健器的動力源是透 過機構運動,而患者不需用力,機構本身會帶領病患進行被動運動(Passive exercise),適用於長期臥床或因腦溢血或腦中風造成的肢體麻痺的病患,促進血 液循環、減緩肌肉萎縮的速度、減輕水腫、維持關節的活動度,並能避免肌肉痙 攣與關節變形或疼痛等後遺症的產生,進而促進肌肉力量的產生及動作的恢復。 被動式復健器是指復健器本身不具動力源,僅利用彈簧、橡皮筋、固定支架、重 力等方式來提供阻力或牽引力,以輔助患者進行復健,被動式復健器的動力源通 常來自於患者的本身。 經由文獻探討可以得知,只要透過適當的訓練機制,就可以達成復健的效 果,在本篇論文中也將進行運動能力復健相關的實驗,在從事實驗時,需要一種 評估指標來偵測生理狀態,因EMG(electromyography)訊號為人類在運動時所 產生的生理訊號之一,又本篇論文主要是針對訓練受測者的運動能力而來從事我 們的實驗設計,故在此我們選擇了EMG 為我們的參考指標。
1.2 Electromyography(EMG)
EMG(electromyography)訊號即是肌電訊號,在肌肉收縮時,因肌肉兩端的 電位差所產生的訊號。一個人的肌肉,在動作時收縮強度的大小,造成不同的電 位差異,得到的訊號也因此有不同的強度及特徵,其中產生電位的肌肉稱為肌纖 維群,這些肌纖維群合稱為動作單元(motor unit),而每一個運動單元的活化接受到位於脊柱(spinal cord)內的運動神經元(motor neuron)延伸到肌肉的軸突 (axon)所控制,軸突的分支會進入終端神經末梢,並通過神經肌肉接點而支配 肌纖維。動作電位會沿著肌纖維兩個方向傳遞,肌纖維膜去極化時會伴隨著離子 的移動,在肌纖維附近產生一個電磁場,當紀錄電極位於此電場時將會偵測到電 位或相對於地的電壓,稱之為動作電位(active potential),而位於同一運動單元 的肌纖維群所量測到的動作電位,合稱為運動單元動作電位(motor unit active potential, MUAP),當活化的運動單元群的動作電位變化經過肌肉、皮膚組織的空 間傳到皮膚表面,此時皮膚表面的電極所收集到的電壓訊號稱之為表面肌電圖 (surface EMG),為了針對 EMG 訊號做適當的處理與分析,因此必須了解其特 性。 肌電訊號是人在做動作(包括靜態動作與動態動作)時肌肉收縮所產生的, 代表的是肌肉活動的狀況,而肌電訊號經過濾波特徵擷取之後,可觀察出動作狀 態、施力大小、力矩大小、手肘角速度以及疲勞程度,不過人體屬於複雜模糊系 統,產生的肌電訊號也是如此,可能的原因如下: (1)同一個人做同樣的動作仍然很難量測到相同的 EMG 訊號[28]; (2)每一條肌肉的訊號不只與一個運動相關,仍然會受到其他運動所影響,例 如肩關節的運動會影響到肱二頭肌與肱三頭肌的訊號,前臂屈曲時不只影響肱二 頭肌,肱三頭肌也會受影響[29,30]; (3)生理狀況(如疲勞、肌肉拉傷)或皮膚表面狀況(如溫度、潮濕)都會影 響 EMG 訊號的表現[31,32,33]; (4)由於每個人之肌肉強度不同,肌肉活動與方式也有差異。
1.3 研究動機與研究方法
透過文獻探討裡面所提到的成果,說明了只要設計出適當的訓練機制,可以 有效的幫助人類在運動感知能力上之改善,進而使著人類的生活更加的輕鬆與便 利。本研究的最終目的,是要設計出一力感輔助之訓練機制,可以改善老年人的 手眼協調能力,減緩運動感知區的退化現象,並達成神經復健的目標。在本論文 我們先參考Collins[26,27]等人的實驗設計,我們先從年輕族群開始進行實驗,觀 察所設計的訓練機制在年輕人族群身上,對於腦波、肌電波以及行為模式是否會 有反應(例如行為模式表現更佳、腦波某區塊反應更加活化),藉此來評估所設 計的訓練機制是否適當;藉由觀察到的現象抽絲剝繭後,透過科學的方法證實此 套機制應用在年輕人身上可行之後,進而應用到老年人身上。 相較於文獻[16,17,20,21,22,23,24,25]採用的力回饋手套、互動式機械手臂、互 動式移動平台為復健工具,這些復健工具一般來說使用起來較為單調,無法讓復 健者在快樂氣氛當中從事復健工作。而力回饋搖桿應用在遊戲上已經行之有年, 我們預期採用它可以讓我們在設計訓練機制的時候,加入更多的趣味性,讓老年 人在歡愉的氣氛當中從事復健,故在此我們採用了力回饋搖桿作為復健工具。 在選擇所使用的復健工具之後,我們將探討不同的力回饋訓練機制對腦波、 肌電波、以及人手運動的影響,並且找出他們之間的關聯性,做為我們設計一個 有效輔助訓練機制的基礎。基於此,我們規劃的系統架構圖,如圖 1.1 所示,受 測者將在靜態環境下操作力回饋搖桿,觀看螢幕上的軌跡圖移動軌跡球,透過我 們所設計的力輔助訓練系統傳達運動指令給實驗場景,實驗場景會將場景資訊傳 送到力資訊計算單元中,進行力資訊的計算。在力資訊計算單元中所得到的力資訊將控制力輔助訓練系統上力量之輸出,給予受測者力感上之回饋,同時受測者 也透過螢幕得到視覺回饋,藉此讓受測者加以學習與訓練,我們也記錄受測者在 訓練過程中之生理訊號。此系統若以驅動方式來做分類,因受測者需要自主性的 進行實驗,整個系統才會運作,故此系統在驅動方式上為被動式系統[40]。 生理訊號 記錄器 受測者 力輔助 訓練系統 實驗場景 力資訊 計算 腦波 肌電波 位置資訊 運動指令 場景資訊 控制訊號 視覺回饋 力感回饋 圖 1.1 力輔助訓練系統架構圖 另外我們考慮到此實驗之目的是訓練,如果受測者是使用它們的慣用手(通 常是右手),那麼這群年輕人不用透過訓練,可以預期的在行為模式上就會有不 錯的表現,所以我們要求受測者使用他們的非慣用手(通常是左手)來從事實驗, 以達到訓練非慣用手與眼睛之間的協調動作。鑒於分析腦波訊號之時,需要單純 的環境跟動作,因為正方形的軌跡包含了最基本的縱向移動跟橫向移動,在此我 們設計了一個正方形的軌道,如圖 1.2 所示,讓受測者沿著虛線逆時鐘走一個正 方形。當受測者在行走軌跡時,我們可得到偏移軌跡和移動時間,軌跡偏移是軌 跡偏離中線的數值,如圖 1.3 所示。
圖 1.2 實驗場景圖 圖 1.3 場景軌跡、實際軌跡及軌跡偏移(Error)示意圖 當受測者在場景當中移動的時候,為了讓受測者可以行走的更好(軌跡偏移 降低)與為了讓受測者學習的更快,我們加入力輔助的機制,在有力輔助的情況 下,會給予隱形力牆輔助,意即當受測者軌跡偏移的時候,會受到一股力量輔助, 好像撞到牆壁一樣,隨之引導回軌跡的中央,為何稱為隱形的力牆?因為受測者 在視覺上面,並不會感到有所差異[18,19],但是在手部的力感上面,卻可以感受 到有股力量。圖 1.4(a)代表沒有力輔助的情況,圖 1.4(b)代表有力輔助的情 況,在有力輔助的情況下,會被引導至中間如同行走在一個狹小的走道裡面,在 這邊為了表示方便,以黃色的力牆來表示,當碰到力牆的時候,就會感受到一股
力量的回饋,隨著軌跡偏移數值越大,所給予的力回饋也越大。而沒有力輔助的 情況,就只有單純的視覺回饋。 (a) 沒有力輔助的情況 (b) 有力輔助的情況 圖 1.4 力輔助示意圖 討論完力輔助的方法之後,我們必須將力輔助應用在我們的實驗之中,接下 來我們討論建構實驗的方法。建構實驗的方法為實驗設計、架構實驗場景、尋找 受測者進行實驗、分析實驗數據、擷取實驗結果、以及重新設計實驗,如圖 1.5 所示,我們經由分析實驗結果不斷地修正實驗,直到找到適合的實驗設計為止, 在本論文我們一共設計了三組實驗。 圖 1.5 實驗建構的流程 為了在文章裡面描述方便,在本論文當中用到許多專有名詞,諸如軌跡偏 移、軌跡偏移平均值、軌跡偏移標準差、圈數、事件、移動時間、肌電訊號、腦 波訊號、力回饋、力輔助等,其中英文名詞以及說明整理如表 1.1 所示。
表 1.1 本論文使用之名詞 中文名詞 英文名詞 說明 軌跡偏移 Error 場景軌跡跟實際軌跡之間的誤差 軌跡偏移平均值 Error_avg 場景軌跡跟實際軌跡之間的誤差平均值 軌跡偏移標準差 Error_std 場景軌跡跟實際軌跡之間的誤差標準差 圈數 Trial 受測者從實驗開始已經行走的圈數 事件 Event 生理訊號的紀錄點 移動時間 Moving time 受測者走一圈所移動的時間 肌電訊號 EMG 肌肉表面的電位訊號 腦波訊號 EEG 大腦表面皮質上面的電位訊號 力回饋 Force feedback 力感上的回饋 力輔助 Force assisting 藉由力回饋產生輔助力,讓受測者操控更 流暢。 首先我們從研究背景引導出運動感知區之復健的議題,繼而設計了一套力輔 助訓練系統去達成我們想要的目的,如圖1.6 所示。為了實現此系統,我們使用 軟體來架設場景、使用力回饋搖桿來設計力輔助的提供、使用生理訊號放大器量 測生理訊號,接下來我們針對實驗結果進行分析,進而改善我們的實驗。在本論 文當中,第一章為導論,說明整篇論文研究背景、文獻探討、研究動機與目的、 以及研究方法;第二章為系統實現與生理訊號量測,介紹當我們要實現這樣的實 驗,所需的軟硬體設備,在這章將會對所使用的軟硬體設備、量取訊號的過程以 及受測者的實驗環境進行說明;第三章為實驗與討論,包含了實驗一、實驗二、 與實驗三,將會介紹所設計的各實驗以及描述這些實驗的所提問題、實驗目的、 實驗假說、實驗方法、實驗設計、實驗流程、實驗結果與分析、以及改善與建議; 第四章為結論。
第二章
系統實現
在第二章我們描述所使用的力回饋裝置、系統間溝通方式、生理訊號量測過 程、場景架設之軟體實現、以及實驗環境。系統硬體架構圖,如圖2.1 所表示, 我們使用了兩台電腦,其中PC 1 用來連接搖桿與監視器,透過監視器掌握受測 者目前的動作,以免發生意外,同時也負責力資訊運算、場景的顯示(針對受測 者)及監控畫面的顯示(針對實驗人員)。我們在場景中移動的資訊,將會透過 PrintPort 傳給生理訊號量測器,其會將所得到的生理訊號和場景資訊,透過 USB 傳給PC 2,實驗人員也藉由 PC 2 在實驗的過程中即時觀測受測者的腦波變化。 PC 1(場景、監視器) 生理訊號量測器 PC 2(生理訊號) 場景資訊 EMG EEG JoyStick 監控畫面 受測者影像 力回饋資訊 位置 資訊 手部動作 大腦運作 EMG EEG USER 受測者 操控 圖 2.1 系統硬體架構圖2.1 力回饋系統
建構的力回饋系統其運作的流程,如圖2.2 所示,系統接受來自使用者的搖 桿位置資訊,經電腦運算後,決定送至虛擬場景的運動指令,並持續將場景所應 該要感受到的受力與經由運算單元得到控制訊號,送至力回饋裝置,再回傳給使 用者。而對於直接和使用者進行互動的力回饋裝置,其基本組成如圖2.3 所示, 在力回饋裝置內有感測元件,還有驅使裝置本體 (如搖桿本體) 將力量傳回操 作者以達成力回饋功能的動力元件。 圖 2.2 力感操控系統控制流程 圖 2.3 力回饋系統示意圖而不同的力回饋裝置以及其感測裝置大致可分為主動和被動式兩種;兩者皆 是當環境有反應力回傳時,會將力感回饋給操作者感受。就回饋力感的功能性而 言,兩者無異,最大的不同在於施力方面,主動式力回饋裝置隨時偵測操作者肢 體的出力情況,而被動式裝置卻僅在與環境的物體接觸後,才會在該環境中產生 施力;換句話說,主動式力回饋裝置能主動感知操作者施力大小與方向,就算施 力者的施力肢體處於自由運動狀態、或是與環境處於靜止對抗狀態 (比如推物 體推不動,但其實手還是在輸出推力的情況) 皆能知道施力者的施力狀況。要 達到隨時主動探知,其裝置上的力感測元件必定要隨時與施力的肢體保持接觸才 行,整體的概念是利用現今發展的肌電訊號直接量測肌肉出力大小,再搭配力回 饋裝置來構成整套系統。至於被動式的力裝置,相較於主動式裝置的複雜性,大 多只包含位置的感測裝置,只能感知裝置的輸出位置或者移動速度,而不能隨時 感知施力者究竟出了多大的力量,也因此僅在操作者接觸遠端物體後,才能決定 究竟施了多少力在遠方環境,如果在被動式的裝置上加上力感測裝置 (force sensor),也可以量測到施力靜止對抗狀態時的出力資訊。整體來說,被動式裝置 因為建置較為容易,且精確度容易控制;如果搭配力感測裝置或是加速度感測裝 置,就可以滿足大部分的使用需求。而本論文以實驗室現有的被動式力回饋裝置 做為發展工具,使用的裝置是 Immersion 公司的 Impulse Engine 2000,如圖 2.4 所示,它是兩個自由度的操控器,而其硬體規格與一般目前世面上的低價力搖桿 的比較表列於表 2.1,相對於市售的搖桿,此搖桿在使用上以及設計上具有極高 的自由度,這對於我們的軟體設計、硬體規劃、以及實驗設計有很大的幫助。
表 2.1 力回饋搖桿規格比較
項 目 Impulse Engine 2000 市 售 Microsoft & Logitech X 軸 65 deg 45 ~ 55 deg 活動範圍 (θ ) Y 軸 65 deg 35 ~ 50 deg 總高度(L3) 28 cm 18 ~ 30 cm 握把長度(L3-L1) 18.5 cm 13 ~ 20 cm 擺動距離(R) 18 cm 10 ~ 16 cm 最大額定輸出力矩 8.9 N not available
搖桿精確度 0.0009” (1100 dpi) (0.023 mm) not available
電腦連接介面 dedicated card USB、game port
定位方式 Free Fixed 工作頻寬 650 Hz not available 控制方式 PC μ-processor 價位 180000 NT 1000 ~ 5000 NT
2.2 生理訊號量測
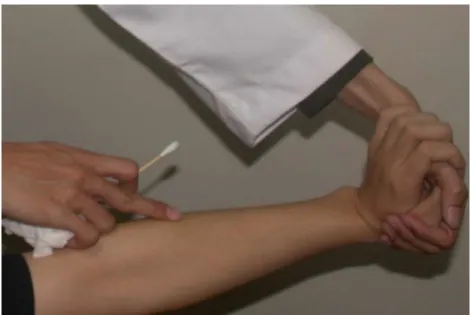
EMG 訊號的量測重點在於了解肌肉運動的情形,所以我們必須找到合適的 肌肉並且量取合適的訊號,首先,我們要認識手臂肌肉的構造、功能以及分佈, 如此才能依照工作的目標來確定電極合適安置的位置。本論文所用到的動作為操 控搖桿做上下左右的移動,故主要針對轉動手脕和移動前臂之肌電波訊號進行分 析,因此我們將針對前臂的肌肉來討論,因二頭肌(biceps)控制的是整個前臂的前進、後退及前臂旋後,我們推測將與操控搖桿上下的移動有所關聯,所以我 們選擇的第一個 EMG 訊號(CH1)為二頭肌,如圖 2.5 所示。因搖桿通常置於人 體之外側,故操作搖桿的時候會有伸展手腕的動作,這樣的動作跟尺側伸腕肌 (Extensor carpi ulnaris) 與橈側伸腕長肌(Extensor carpi radialis longus)這兩條肌 肉有所關聯,並且跟操控搖桿左右的移動有所關係,所以我們選擇了橈側伸腕長 肌為第二個 EMG 訊號(CH2)、尺側伸腕肌為第三個 EMG 訊號(CH3),如圖 2.6 所示,圖2.7 是某受測者,量測 EMG 訊號之電極貼片實際的位置。
圖 2.6 尺側伸腕肌、橈側伸腕長肌肌肉位置 [34] 在量測貼電極前,必須先確定肌肉的位置以及肌肉表面的清潔,最好用磨砂 膏進行去角質的動作,這是避免雜訊的方法之一,確實地將電極貼在肌腹的位置 以保有最佳的訊號輸出,每次的實驗進行也必須確保兩電極間的距離為一固定 值,一般而言一至二公分都有人採用,而基於電極型式的考量,我們使用的是兩 公分左右的間距。在電極訊號線的部分也必須加以固定,根據我們的實驗得知, 訊號線的晃動會造成很大的雜訊,如果沒有確實地固定,會造成系統的不穩定; 由於除了二頭肌之外的兩條肌肉,並不是非常的明顯,所以在抓取肌肉位置的時 候,我們會請受測者做我們所指定的姿勢對抗出力,如圖 2.8 所示,藉以抓取出 最佳的肌電訊號量測位置。
圖 2.7 量測 EMG 位置意示圖,圖片中為受測者之左手
圖 2.8 找尋尺側伸腕肌(Extensor carpi ulnaris)之過程
在腦波量測方面,請受測者穿戴64通道的腦殼帽,如圖2.9所示,此腦殼帽 使用Ag/AgCl的電極來量測大腦表面皮質的電位訊號,我們將作為參考的電極貼 在耳後,利用雙耳跟鼻樑的位置,將腦殼帽置中對齊,確認帽子符合受測者的頭 型並且前後左右皆對稱之後,開始在每個通道中注入導電膠,所有電極的阻抗值 皆需低於10kΩ才可開始實驗,否則擷取到的訊號會不夠乾淨,會造成日後資料 分析上的困難。我們觀看阻抗值的過程,如圖2.10所示,圖中顯示全部64個EEG 訊號和3個EMG訊號的阻抗值,數值的大小使用顏色來表示,必須讓所有的阻抗
值呈現綠色或藍色(代表阻抗低於10kΩ)才可以開始實驗。放大器是採用Scan NuAmps2 Express system (Compumedics Ltd., VIC, Australia),如圖2.11所示, 取樣頻率為1000Hz。在擷取EEG的訊號方面,我們採用了50Hz的低通濾波器; 在擷取EMG訊號時則採用了20~400Hz帶通濾波器。在實驗結束之後,我們會利 用3D定位儀,將受測者的頭殼形狀和EEG通道位置記錄下來,圖2.12(a)為定 位的過程,而圖2.12(b)為3D定位儀,我們將3個位置感測器放在受測者的後腦 杓、左耳、和右耳,接下來針對每一個EEG通道記錄其對應的位置,圖2.13為系 統所記錄到的腦殼形狀及其相對應的EEG通道位置。 圖 2.9 腦殼帽(64 通道) 圖 2.10 腦波、肌電訊號阻抗值之示意圖
圖 2.11 生理訊號放大器-Scan NuAmps2 Express system
(a) 定位過程 (b) 3D定位器 圖 2.12 紀錄頭殼形狀和 EEG 通道位置
圖 2.13 實際所量得之 3D 頭殼圖
2.3 軟體實現
本論文運用到的軟體工具主要為C語言,主要實現的部分包括搖桿的驅動、 場景的繪製、生理訊號放大器跟搖桿之間的傳輸溝通、力回饋資訊的計算、以及 行為資訊之記錄。 在本論文的實驗中,需要使用到電腦繪圖工具製作場景,在電腦繪圖的運算 環境,如圖2.14所示,使用者透過 I/O 設備與視窗系統互動,常見的視窗系統如 Microsoft Windows系列的作業系統及 UNIX上的 X window 環境,應用程式及 其模型則使用了圖學函式庫(Graphics library),所謂圖學函式庫是一個常式 (routine)的工具集,包含低階的程式碼,雖然工作與圖形的硬體設備很密切, 但通常不會限定設備(Device-independent),顯示設備包括顯示卡和其驅動程式 以及顯示器等部分,常見的圖學函式庫有OpenGL、WTK等。在建構虛擬環境之 前,我們先回顧較知名的虛擬實境應用軟體,並進行整理與比較 [35,36,37,38],以便從中挑選合適之工具,茲列如下:
圖 2.14 電腦繪圖之運算環境 1. WTK ( World Tool Kit )
WTK是一套開發時間較早的圖學函式庫,它所能支援的周邊軟體 相當完善,亦可在多種不同的作業系統平台上運作;然而其本身並不提 供視覺化的模型編修工具,必須由其他的模型建構軟體建立所需的物 件,再利用WTK的程式呼叫物件並建立虛擬場景,因此撰寫與開發WTK 程式相當花費時間,使用上較不方便。 2. World Up World Up與WTK為同一家公司所開發的虛擬實境應用軟體開發工 具,所能支援的周邊硬體數量相當多。與WTK不同之處在於其已具備 簡單的模型編修功能,並提供了開放性的資料庫連接(Open DataBase
應用模型
I/O 設備
視窗系統
應用程式
圖學函式庫
(Graphics library)
顯示設備
Connectivity, ODBC)功能。World Up的使用者介面設計良好,即使是 不熟悉程式設計者都可以輕易開發所需要的虛擬世界,然而World Up 對電腦的硬體要求較高,尤其在圖形的處理能力上,除了中央處理器 (CPU)和隨機記憶體(RAM)外,一般需要搭配較好的繪圖加速卡。 3. Division Division原本只能在高階繪圖工作站上運作,因為個人電腦的快速 發展,也開發了個人電腦的版本。與WTK一樣,Division本身不提供編 修功能,需藉由其他軟體來建構虛擬場景所需的物件,但提供了相當多 的物理特性函式庫,設計者毋需特別撰寫即可使用。Division的個人電 腦版本對於硬體要求相當高,一些工作站上的功能還是無法在個人電腦 上使用。 4. VRT ( SuperScape ) VRT亦為一套開發較早的虛擬實境應用軟體,除了可以提供基本的 物件編修功能外,亦可接受其他模型建構軟體所支援的檔案格式,擴充 性頗佳;然而透過VRT所表現的虛擬實境場景畫面在顏色的表現上受到 相當大的限制,為其主要的缺點。 5. OpenGL OpenGL的正式定義是「繪圖硬體的軟體介面」,它是3D繪圖與模 型函式庫,既迅速又可移植;OpenGL是一個文件完備的應用程式設計 介面( Application Programming Interface, API ),提供許多包裝好的功 能函數;除此之外,更具有穩定、可靠、可攜性高等特性,尤其OpenGL 程式的可攜性,不論在Windows或是UNIX上皆可使用,使得用OpenGL 所開發出來的程式在未來更具有發展性。
綜合以上的比較,我們決定選用穩定且可攜性高的OpenGL圖學函式庫作為 我們的電腦繪圖工具,OpenGL已在1992年已成為工業標準,由獨立的OpenGL
ARB( Architecture Review Board )管理其規範,其中的成員包括SGI( Silicon Graphics )、Digital、IBM、Intel、以及Microsoft等大廠,很多影像顯示卡和作業 系統也都支援OpenGL,圖2.15為OpenGL 成像流程,當應用程式發出OpenGL API 函數呼叫時,指令會放到指令緩衝區中,緩衝區最終會填滿指令、座標點資料、 材質資料等,當緩衝區清空(Flush)時,不管是經由程式指令或驅動程式本身 的設計,指令與資料都會被傳到下一個階段,座標點資料會先被轉換並進行燈光 運算,其中用以描述物體幾何位置的座標點會針對物體的位置與方向進行運算, 同時也會進行光影計算,以得出每個點上的顏色該有多亮,完成這個程序後,資 料將提供給掃描顯像部份,掃描顯像器將依幾何位置、顏色與材質資料建立影 像,然後影像會放到圖形緩衝區內,圖形緩衝區是圖形顯示裝置的記憶體,如繪 圖卡、顯示卡等,到了這個階段會把影像顯示到螢幕上。 圖 2.15 圖學函式庫 OpenGL 成像流程
2.4 實驗場景與環境
在此節我們將介紹實驗場景與環境,我們所使用的力回饋搖桿跟操作平台, 如圖 2.16 所示,受測者可以將他們的手,依靠在平台的黃色扶手上面,避免因 為受測者的手懸空而造成的疲累現象,而手握搖桿的姿勢,如圖 2.17 所示,受 測者所觀看的螢幕,如圖 2.18(a)所示,為 170x170 單位長的正方形,右邊有一 個紅綠燈的裝置,當受測者將軌跡球放在圖 2.18(b)虛線所組成的正方形內超 OpenGL 指令緩衝 區 OpenGL API 函數 呼叫 轉換與打光 掃描 顯像 圖形緩 衝區過 5 秒,紅綠燈的顏色就會從紅色漸漸變成綠色,這時候受測者開始行走。我們 設定需要等待 5 秒鐘,目的是要讓受測者在做完一圈之後休息一下,也是為了便 於 EEG 訊號的分析。
圖 2.16 力回饋搖桿及其扶手
(a) 場景軌跡圖 (b) 出發區塊 圖 2.18 實驗場景圖 由 於 生 理 訊 號 是 一 連 續 長 串 的 資 料 , 所 以 我 們 需 要 一 些 事 件 紀 錄 點 (Event),以方便我們進行資料分析,如圖 2.19 所示,我們設定 10 個事件記錄 點,在出發時、進入右上轉角、離開右上轉角、進入左上轉角、離開左上轉角、 進入左下轉角、離開左下轉角、進入右下轉角、離開右下轉角、以及進入終點線, 系統分別會記錄 Event 01~Event 10,如此,便可以把直線的訊號跟轉角的訊號, 一段段找出來加以分析,包含了轉角移動速度跟直線移動速度的比較,進入轉彎 處之後 EMG 最大值出現的時間,以及輔助前跟輔助後 EMG 比較值。在介紹完 軟硬體實現與實驗場景,我們將於下一章介紹實驗與討論。 開始線 紅綠燈 終點線
第三章
實驗與討論
在介紹完硬體設備以及實驗場景之後,我們將針對之前提出的問題設計實驗 來探討我們的問題包括:1.有無力輔助訓練對於軌跡偏移、生理訊號的影響為 何?2.不同力輔助的設計對於軌跡偏移、生理訊號的影響又會是如何?針對這些 議題,我們首先設計了實驗一來探討訓練前後行為表現與生理訊號上的差異,從 實驗一中我們得到了一些經驗,繼而設計了實驗二與實驗三。實驗二中,我們將 探討限速球控制移動時間的作用,藉以控制變因讓我們方便分析,實驗三中,我 們的分析對象從族群比較轉變為針對單一受測者去進行分析,並且比較單一受測 者在有力輔助跟沒有力輔助時,受測者的行為表現,以及訓練前後 EMG 的差異。 在本章節,將介紹每個實驗的實驗目的、實驗設計、實驗流程、實驗結果、實驗 分析方法、以及實驗的改善與建議。3.1 實驗一
在實驗一中,要比較的是在有力輔助與沒有力輔助訓練的情況下,訓練前後 在肌電波與行為表現上的差異,其架構如圖 3.1 所示。我們先請受測者先行走數 圈路徑,作為訓練前的資料(pre-training data);接下來,我們將受測者分為兩個 族群,分別進行有力輔助與沒有力輔助訓練,這段期間我們稱之為「訓練期」(training)。訓練期結束之後,請受測者行走數圈作為訓練後的資料(post-training data),將訓練前後的資料比較,看看在有力輔助的情況下,是否會學習的比較快、 比較好,又在生理訊號上可以觀察到什麼樣的變化?在行為表現上,我們希望有 力輔助訓練的族群,在訓練期之後的軌跡偏移可以比沒有力輔助訓練族群來的好 而且移動時間更快;在肌電訊號上,我們使用肌電訊號來評估受測者的行走操控 策略,希望透過力輔助學習的族群到了後期可以有更穩定的操控策略,亦即在行 走每一圈的肌電訊號之間差異會越來越小。 圖 3.1 實驗一架構圖
3.1.1 實驗設計與方法
在介紹完實驗一的架構之後,我們將探討「實驗一」中的一些機制,這些機 制會讓我們的實驗過程更加的順利,茲列如下: 1.訓練期力輔助的提供方法 在具有力回饋訓練這個階段,我們一開始的設計是直接讓受測者進行全部都有力輔助的 50 圈訓練,但當我們自己的研究人員進行試驗性實驗(正式實驗前 測試性質的實驗)當中發現,這樣的作法並不恰當,就如同我們學騎腳踏車,有 人扶著的時候,感覺自己學會了,但是當扶我們的力量「突然」消失,我們可能 突然失去平衡,所以,在學習騎腳踏車的時候,我們的父母總是會採取有時輔助 你平衡,有時候放手讓你自己平衡的策略,不會一直扶著幫你保持平衡;同樣的 情況也發生在我們的研究人員身上,我們發現當採取全部都有力牆的設計,受測 者並沒辦法達到很好的學習效果,因為他們太依賴力牆,在失去力牆的瞬間,表 現會變的異常的差,因此在後來的正式實驗訓練過程的階段,我們採取了 4 次有 力牆,1 次沒力牆的實驗方法,其目的就是為了讓受測者不要太依靠力牆的輔助, 試著學習在沒有力牆的時候,慢慢掌握住精確控制軌跡的技巧,實驗一改良前後 的優缺點比較如表 3.1 所示。 表 3.1 實驗一改良前後之比較 實驗一改良前 實驗一改良後 訓練前 20 圈無力輔助 20 圈無力輔助 訓練中 50 圈有力輔助 4 圈有力輔助+1 圈有力輔助,循 環 10 次。 訓練後 20 圈無力輔助 20 圈無力輔助 優點 在訓練中的時候,可以很快速地 掌握操控的感覺。 採取四次有力牆,一次沒有力牆 的策略,可以讓受測者每隔五圈 就依靠自己的技巧去操作軌跡 球,達到學習的效果。 缺點 太依賴力牆,反而失去學習的效 果。 有力輔助的圈數變少,讓整個過 程當中力輔助的圈數低於一半。
2.重走機制之設計 我們為了避免受測者沒有專心做實驗,在實驗設計中設有重走機制,受測者 一開始會因為不熟悉操控的技巧,所以軌跡偏移都會比較大,我們會取受測者訓 練前的軌跡偏移之平均值當作標準。我們預期受測者會越走越好,如果受測者訓 練階段之後的數值,比之前的練習階段之軌跡偏移的平均值還要差的話,我們判 斷受測者沒有專心做實驗,需要重走;當然還有另外一種情況,那就是他訓練前 的階段就已經走的很好了,誤差已經很小了,即使誤差略為增減也不需要再重 走,因此我們有設定一個臨界值,如果訓練前的軌跡偏移之平均值小於此臨界值 的話,那麼重走的臨界值就直接設定為此臨界值,在此,我們所挑選的臨界值為 0.8,因為從我們的試驗性實驗裡面所獲得的 5 筆受測者資料來看,軌跡偏移 0.8 已經算是表現中上,需要集中精神才可以達到的水準。
3.1.2 實驗流程
討論完實驗設計的概念之後,我們開始規劃實驗流程與步驟,以進行實驗, 詳細的步驟如下: 1.在受測前跟受測後,我們會使用握力器,來記錄受測者握力的大小,握力 的大小在分析 EMG 訊號時可以作為肌肉活化程度與出力大小之參考指標。 2.首先讓受測者行走寬度 20 的走道(在此寬度很寬,故可視為無力回饋), 如圖 3.2 所示,行走 20 次測量所走的軌跡偏移值,作為學習訓練前的比較基準。圖 3.2 寬度 20 的走道 3.接下來我們分為兩種不同實驗族群來做比較,分別是:在「訓練期」有力 輔助訓練、在「訓練期」無力輔助訓練,他們之間的差異為:在「訓練期」有力 輔助訓練時,同時具有視覺回饋與力感回饋、而在「訓練期」無力輔助訓練,則 只有視覺回饋,沒有力感回饋。 (1)「在訓練過程中」有力輔助訓練:利用寬度為 2 單位的走道來訓練(等 於直接可沿者力牆行走),每走 4 次寬度 2 的走道,如圖 3.3 所示,再走一次寬度 20 的走道,如此循環 10 次,共得 50 圈的資料。在這個階段,每走 1 圈可以休息 5~10 秒鐘,每走 5 圈必需休息 1 分鐘。 圖 3.3 寬度 2 的走道 (2)「在訓練過程中」無力輔助訓練:在力牆寬度 20 的通道內,行走 50 圈, 每走 1 圈可以休息 5~10 秒鐘,每走 5 圈必需休息 1 分鐘。 4.訓練過後,讓受測者行走寬度 20 的走道 20 次,作為跟訓練前資料的比較 基準,並比較訓練前後完成一圈所需要的時間與軌跡偏移的差異。 5.我們所採用的受測者,年齡範圍分布在 20~25 歲之間,男生七名,女生四
名,以年輕的學生為主要的族群,資料如表 3.2 所示。 6.更詳細的實驗流程可以參考圖 3.4 中的說明,在此我們使用附錄 1 的資料 對受測者介紹我們的實驗內容及流程,介紹完畢之後,開始進行注入導電膠的工 作,在確認阻抗值皆低於10kΩ 後,會讓受測者熟悉搖桿的操作方式,在量測 3 次的握力之後,開始量測生理訊號。一開始我們會有五分鐘的全身放鬆跟五分鐘 手握搖桿,在這階段的生理訊號是為了作為之後分析生理訊號的基準訊號之用。 在進行完20 圈之後,我們請受測者休息順便填寫我們所設計的問卷,接下來就 開始進入訓練期,訓練期之後,我們也請受測者休息五分鐘順便填寫問卷,休息 完畢之後進行訓練後的資料收集,然後結束實驗。 表 3.2 實驗一受測者資料 序號 編號 力輔助 學習 性別 年紀 重走 率 序號 編號 力輔助 學習 性別 年紀 重走 率 1 070316A 有 女 25 0% 7 070417N 無 女 20 21% 2 070322A 有 男 24 0% 8 070418N 無 男 21 30% 3 070323A 有 男 23 0% 9 070424N 無 男 21 9% 4 070330A 有 男 22 0% 10 070501N 無 女 21 0% 5 070403N 無 女 22 1% 11 070502N 無 男 20 3.2% 6 070410N 無 男 23 2.1%
3.1.3 實驗結果與分析方法
在行為表現方面,每 1/33 秒會紀錄受測者所操作軌跡球的位置,假設受測 者走一圈花了 30 秒的時間,便有 990 筆資料,由這些資料便可以得到軌跡偏移 平均(Error avg)跟軌跡偏移標準差(Error std),計算方法如式 3.1、式 3.2 所示: 1 N X X N i i∑
= = (3.1)(
)
N X X Std N i i∑
= − = 1 2 (3.2) 其中 X 代表每 1/33 秒所記錄到的軌跡偏移值,N 代表所紀錄的樣本數。在此挑 選幾筆比較有代表性的資料列於圖 3.5~圖 3.7,每張圖共有三張子圖,分別是移 動時間、軌跡偏移平均值、以及軌跡偏移標準差,標準差可以作為操控穩定度的 一項指標,標準差越低代表受測者的操控越穩定,黑線代表的是在訓練前的圈 數,為第 1~20 圈,藍線代表的是在訓練中的圈數,為第 21~70 圈,紅線代表 的是訓練後的圈數,為 71~90 圈。圖 3.5 實驗一:受測者 4 號行為資料
圖 3.7 實驗一:受測者 11 號行為資料 從這 11 名受測者的行為表現資料,分別從軌跡偏移和移動時間進行分析, 發現以下現象: 1.軌跡偏移方面: (1) 軌跡偏移的趨勢,不論是有力輔助訓練或是無力輔助訓練,都是漸漸 遞減。 (2) 軌跡偏移標準差所代表的意義為受測者操控軌跡球的穩定度,如果標 準差越低,代表受測者操控軌跡球的穩定度越好,如果標準差越高,就算平均值 很低,也代表受測者操控軌跡球的時候處於一種不穩定的狀態,我們可以發現在 具有力輔助的時候,軌跡偏移的標準差,都會變的比較低。 (3) 有力輔助訓練的四名受測者在 21~70 圈的時候,每隔 5 圈他們的軌 跡偏移平均值都會突然變差(就圖形來看是跳動),代表他們在之前的四圈,太
依靠力牆。但此現象在某些受測者可以發現越到越後面的圈數,這種跳動的現象 越來越不明顯,代表這些受測者到了後期比較沒有依靠力牆,是靠自己的力量在 前進。 (4) 相對於接受力輔助訓練的族群,在沒有接受力輔助訓練的族群,我們 則看不到每隔五圈,軌跡偏移突然變差的現象。 (5) 如果受測者一開始的操控能力就非常的好,那麼他不需要透過任何的 訓練,就已經具備了訓練之後的效果,以第 4 名受測者來說,我們發現他的移動 時間與軌跡偏移,幾乎都是固定同一個值,如果是這樣的受測者,那麼我們比較 訓練前後的差異,將會變的沒有意義,因為受測者不需要訓練,就已經達到很好 的表現了,這也造成了我們分析上的困難。 2.移動時間方面 (1) 移動時間的趨勢,都是漸漸遞減。在此將 1~20 圈的移動時間取平均, 與 71~90 圈的移動時間取平均進行輔助前後時間的比較,結果如表 3.3 所示,我 們可以發現大部分的受測者在輔助後所花費的時間大致上為輔助前的 60%,此數 據將會當做實驗二的設計參考。 表 3.3 輔助前後時間比 受測者 輔助前後時間比 S070316A 1 : 0.362467 S070323A 1 : 0.816161 S070330A 1 : 0.538165 S070403N 1 : 0.725094 S070410N 1 : 0.492015 S070417N 1 : 0.699373 S070424N 1 : 0.72496
(2) 移動時間花的越多,通常軌跡偏移也會跟著下降,如圖 3.6 所示,可 以觀察到隨著圖 3.6 第一張子圖(移動時間)的上升,圖 3.6 第二張子圖(軌跡 偏移)就隨之下降的現象。 (3) 隨著行走次數的增加,就算移動時間減少,軌跡偏移也會降低,這應 該是受測者學習的效果,如圖 3.7 所示,觀看圖 3.7 的第一張子圖(移動時間) 在第 21~90 圈的時候,是漸漸遞減的,而圖 3.7 的第二張子圖(軌跡偏移)在第 21~90 圈的時候,也呈現遞減的趨勢。 (4) 所有的受測者,均表示在轉角移動的時候,其困難度比直線移動還要 高,所以在轉角的移動速度會比直線的移動速度還要慢,故在此針對直線、轉角 移動速度進行分析,結果如表 3.4 所示。我們可以發現大部分受測者在直線的移 動速度除以轉角的移動速度之比值大約為 2,此數據將會作為實驗二的設計參考。 表 3.4 轉彎速度跟直線速度之比較 受測者 轉彎速度:直線速度 S070316A 1 : 1.980517 S070323A 1 : 1.919004 S070330A 1 : 1.821103 S070403N 1 : 1.781955 S070410N 1 : 1.90809 S070417N 1 : 1.926298 S070424N 1 : 1.896323 我們同時也對受測者於實驗中所測得的肌電訊號進行分析,由於實驗進行 時,受測者在行走軌跡中肌肉所收縮的反應均會產生於肌電訊號之中,因此運用 人體生理訊號之雜訊消除與處理技術之後,再進一步分析受測者真實的生理反 應,在此我們採用20~400 Hz的帶通濾波器來對肌電訊號進行濾波的動作。 實際所量得的EMG訊號與相對應的肌肉位置,如圖3.8所示,在圖中可以看
到在操作搖桿時所量測的三條肌肉,其對應的EMG值,紅色的線代表我們所取 的事件記錄點(Event),共有十個,分別代表出發時、進入第一個轉角、離開 第一個轉角、進入第二個轉角、離開第二個轉角、進入第三個轉角、離開第三個 轉角、進入第四個轉角、離開第四個轉角、與回到終點線。 圖 3.8 二頭肌、橈側伸腕長肌、與尺側伸腕肌的肌肉位置 及其在操控軌跡球的 EMG 訊號 原本我們預期有力輔助訓練的族群,其肌電訊號應該會比無力輔助訓練的族 群更快進入穩定的狀態(標準差變低),然實際情況則因個體之間存在的差異性, 每個人的策略皆有所不同,所以在這點無法看到一致性的現象。在這裡我們將比 較感到興趣的兩點,茲列出來分別是:1.訓練前後EMG平均值的比較,2.過轉角 時產生最大EMG的時間及進轉角時的差值α 。 1. 訓練前後EMG平均值之比較 由於在不同的事件之中,所使用到的肌肉收縮程度均不盡相同,因此藉由觀 察EMG,我們可以了解受測者在行走軌跡中肌肉收縮程度,進而了解其行走策略 是否有因輔助之後行走的更省力、也更舒適,如圖3.9所示,我們可以看到受測 者尺側伸腕肌(CH3)的EMG平均值上升,同時也可以發現在標準差(Standard deviation)中輔助後明顯的比輔助前上昇許多,初步我們認為是因為實驗過程中
所造成的肌肉疲勞所導致的,我們希望在實驗的過程中,能幫助受測者訓練平時 操作精密動作時才會使用的小肌肉有被訓練到,如果能因為此裝置而能訓練這些 小肌肉,意味著更能精準的操控較為精密以及微小的動作。 圖 3.9 EMG 在各 Event 中的平均 2. 過轉角時產生最大EMG的時間及進轉角時的差值 在行走軌跡的過程中,對於受測者感到困難的地方就是在轉彎的時候,對於 不同的受測者,其感到困難的轉角也不盡相同,因此在操控肌肉群時也勢必要更 精準才能達到良好的操控。根據這點,我們在轉角中的 EMG 資訊就更為重要, 在轉角中 EMG 最大值的產生也就代表在轉角中肌肉收縮最大的時候,因此在分 析上,我們將產生 EMG 最大值的時間與進入轉角的時間相減,並比較輔助前與 輔助後的資料。假設在轉角中 EMG 最大值發生在第 A 秒,而進入轉角是在 B 秒, 則過轉角時產生最大 EMG 的時間及進轉角時的差值α 為 B -A = α (3.3) 我們分析了 7 名受測者的 EMG 資料,在 6 名受測者身上發現α 值是下降的, 如圖 3.10 所示,同時可以看到標準差也都變小,這個現象可以解釋成在轉角中
對於肌肉控制變的較佳,因為標準差有很明顯的變小,代表受測者更能在轉彎中 知道何時該出力,並使用到這些控制的小肌肉使得行走軌跡表現得更好。 圖 3.10 α 在各個不同轉彎點的值
3.1.4 改善與建議
針對實驗一所得到的實驗結果與分析,我們進行檢討與改善,讓下一個實驗 設計更加的完整,茲列如下: 1.我們嘗試找出移動時間與軌跡偏移之間的關係,意即所花費的時間越長, 是否軌跡偏移的數值越小,我們嘗試找出受測者 1~20 圈與 71~90 圈的移動時間 對應到其軌跡偏移的關係,如圖 3.11-3.12 所示,橫座標軸是移動時間,縱座標 軸是軌跡偏移,在 1~20 圈的時候,因為受測者還在學習,花費的時間跟軌跡偏 移之間沒有一定的關係,所以我們沒辦法看出一條明顯往下掉的線,在 71~90 圈的圖形中,此趨勢較明顯,我們可以看到一條從左上往右下掉的線,然而,實 際上我們將所有受測者的圖型都畫出來,並無法在所有的受測者皆看到此現象。(a)第 01~20 圈(相關係數=0.36162) (b)第 71~90 圈(相關係數=-0.2619) 圖 3.11 軌跡偏移對應移動時間之關係圖(受測者 070330A) (a)第 01~20 圈(相關係數=0.36162) (b)第 71~90 圈(相關係數=-0.2619) 圖 3.12 軌跡偏移對應移動時間之關係圖(受測者 S070418N) 2. 我們可以想見,當受測者移動時間縮短的時候,軌跡偏移會隨之變高, 當受測者很有耐心,花很多時間慢慢移動,那麼它的軌跡偏移就會降低,而實驗 一的 11 個受測者,每個人在行走的時候,所採取的策略也都不太一樣,有些採 取一開始慢慢的走,但是後來漸漸失去耐心,只想快點把實驗結束,以致所花的 移動時間變少了,但軌跡偏移也隨之增加了;也有受測者從頭到尾,每圈都花很 多的時間仔細的完成,其軌跡偏移從頭到尾都很低,例如第 10 個受測者,一開 始走的速度算正常,到了後來以異常有耐心的慢速,達到相當高的精準度;也有
受測者一開始的表現就相當的傑出,例如第 1 個受測者,到了後來失去了耐心, 在相同的移動時間下,反而走的更差了,變動的因素太多造成分析上面的困難。 3. 在實驗一中,我們並沒有規範移動時間,而移動時間跟軌跡偏移之間, 又有交互影響的關係,實驗一設計的缺點之一,就是變因沒有控制好,在分析行 為資料的時候,所要分析的結果有兩個變因:移動時間與軌跡偏移,這樣將會造 成我們分析上的困難,以致無法在力輔助訓練跟沒有力輔助訓練之間,看出有意 義的差異,從而產生了限速球的想法,用來控制移動時間,進而設計出實驗二。 4.在實驗一的實驗設計中,有三個受測者的重走率過高,分別是 S070417N、 S070418N、S070424N,這可能是因為重走機制設計不當所致,在機制的設計上, 還有需要改進的地方。
3.2 實驗二
透過實驗一的改善與建議,我們針對受測者的移動時間加以控制,因此提出 加入限速球。在實驗二當中,我們所要探討的,要怎麼要設計出一個合適的限速 球規範,讓受測者去遵守,測試限速球是否能夠達到控制移動時間之目的,如此 才可以讓變因減少,讓我們分析數據時,不會受到兩個變因之間的交互干擾而造 成分析上的困難。3.2.1 實驗設計與方法
在實驗二中我們的限速球設計是讓受測者所操作的軌跡球,不超過限速球, 實際的場景圖如圖 3.13 所示,紫色的球是會自己移動的限速球,黃色的球是受 測者所操控的軌跡球。整個實驗流程除了多限速球,其他設定皆與實驗一相同, 限速球的設計方法茲列如下: 1.軌跡球與限速球顏色之設計 我們將實驗場景改成如圖 3.13,在顏色上面我們也做了調整,將受測者所操 控的軌跡球從原本的白色改成黃色(柔和的顏色),將限速球改為紫色(具有警 告效果但不刺眼的顏色),而黃色與紫色也為互補色,當兩球重疊時,黃球會更 顯眼,而不會被紫球給掩蓋過去;限速球將會在軌跡球出發的時候,也跟著同時 出發,並按照我們所設定的速度前進。 圖 3.13 限速球(紫色)與軌跡球(黃色)示意圖2.直線速度與轉角速度 透過實驗一的實驗數據資料顯示,在直線的時候,受測者會走的比較快,然 而在轉彎的地方,大部分的受測者都會花上比較多的時間。基於此,我們參考了 在實驗一中部份受測者轉彎速度跟直線速度的比例,如表 3.4,將限速球的速度, 在直線跟轉彎上面做了調整,限速球在遇到轉彎的地方,速度會是原來的 50%, 這將讓我們的限速球操控起來更加的自然。 3.限速球速度的設定 我們也考慮限速球走一圈秒數的設定,隨著每個受測者運動能力的不一樣, 限速球的速度當然也跟著需要調整。在此,我們也利用了實驗一所獲得的數據資 料,來比較在輔助前後受測者所花費的時間的比例,通常受測者都會越走越快, 那麼他們在訓練前後的時間差到底會是多少呢?在此將實驗一輔助前的移動時 間與輔助後的移動時間分別取平均,得知在輔助前後所花的時間上,輔助後的移 動時間大致是輔助前移動時間的 60%,所以我們在設定限速球速度的時候,會取 前面幾圈的移動時間取平均,乘上 0.6,做為限速球的速度設定標準。
3.2.2 實驗結果與分析
在實驗二當中所尋找的受測者,以年輕的大學生為主,年齡分布在 21~22 歲,有男有女,其資料如表 3.5 所示。實驗二行為表現的實驗結果,如圖 3.14~ 3.16 所示,由上而下分別是移動時間、軌跡偏移平均值與軌跡偏移標準差。表 3.5 實驗二受測者資料 編號 日期 力輔助學習 性別 年紀 1 070508A 有 女 22 2 070509A 有 男 22 3 070509N 無 女 21 圖 3.14 實驗二:受測者 1 號行為資料
圖 3.15 實驗二:受測者 2 號行為資料 圖 3.16 實驗二:受測者 3 號行為資料 觀看受測者 1 號的移動時間圖(圖 3.14),可以發現,在第 1~20 圈的移動 時間與 21~90 圈不一樣,這是由於我們告訴第一個受測者他應盡量跟上限速球, 但是不可以超過限速球太多,這不可以超過限速球太多的定義是不明確的,導致 第一個受測者在一開始的時候總是超過限速球太多,以至於時間很不一定,後來
我們請他不要超過限速球,所以在第 20 圈之後,受測者 1 號的移動時間皆在 40 秒上下。又因為我們採用練習時間的移動時間平均乘上 0.6 的方法,以致於限速 球走一圈的時間是 40 秒,這真的太慢了。所以我們後來限速球的設定方法改為 視情況而定,而非一定是套用 0.6 倍。 受測者 2 號在實驗的一開始,第 1~70 圈移動時間都幾乎一樣,代表他跟隨 限速球跟的很好,後來因為我們的重走機制,還是使用軌跡偏移值來當作重走機 制的標準,以至於他 71~90 圈花了更多的時間就是為了降低軌跡偏移值,所以 針對第三個受測者,我們把這項重走機制拿掉,並且明確的告知第三個受測者, 軌跡球不得超過限速球,在此可以發現,如圖 3.15 所示,第三個受測者的移動 時間被我們所設計的限速球控制的相當的好。
3.2.3 改善與建議
從實驗一、實驗二的實驗結果與分析,我們發現在之前的實驗設計上還有一 些缺陷,從這些缺陷之中我們得到了一些經驗,並且進一步的更改我們的實驗設 計,茲列如下: 1.向受測者講解實驗說明之改善 我們必須明確告知受測者,軌跡球不得超過限速球,否則可能會發生重走的 事情,另外我們也在受測者觀看的螢幕附近,張貼了相關的警告標語以及圖片說 明,讓受測者不至於忘記我們的叮嚀而讓他所操控的軌跡球超過限速球。2.重走機制的改變 實驗二沒有適當的重走機制,仍然是沿用之前的重走機制(利用軌跡偏移來 判斷),以至於受測者太重視軌跡偏移,而沒有達到控制時間的效果。基於此, 我們改善了重走機制,將重走機制改為與軌跡球的距離超過 1/3 正方形邊長的時 候,就必須要重走。這樣的重走機制,讓我們可以在之後的實驗三中看到,移動 時間已經可以被控制的相當好。 3. 力牆的改變 在此同時我們也改變力輔助的方法,原本的力牆是雙邊的,但是如果力牆設 定的數值過大,會產生震盪的問題,所以雙邊的力牆所給予的力量是比較小。為 了要有更強壯的力牆,我們在這邊將力牆改為單邊的力牆,我們同時也想知道力 牆如果只有改成一邊的話,受測者是否可以達到力輔助的效果。 4.遭遇的困難與改善方法 整理實驗一和實驗二的 14 名受測者資料,我們明白受測者之間存在的差異 性,會讓我們無法將這些受測者放在同一基準點上分析,因每個人的運動調控能 力皆有所不同,為了要解決這各問題,我們設計了實驗三,將針對同一個受測者 進行分析,並且會觀察當受測者操控軌跡球的時候,在有力輔助的情況下操控軌 跡球,跟沒有力輔助的情況下去操控軌跡球,會有一個什麼樣的差別。
3.3 實驗三
在實驗三中,與實驗一、實驗二不一樣的地方在於,我們的焦點從比較訓練 前後的差異,轉移到當單一受測者在操控軌跡球之時,在有力輔助與沒有力輔助 的情況下操控,受測者的行為面、肌電波、以及腦波具有什麼樣的一個關係變化? 當我們更改我們給予的力輔助方法(例如把力牆從雙邊改為單邊)之後,是否仍 然對受測者有所幫助?又限速球對於 EMG 的影響為何?在此我們使用新的重走 機制(軌跡球跟限速球的距離不得過遠)來控制移動時間。相對於實驗一需要將 受測者分為有力輔助訓練族群跟沒有力輔助族群,實驗三只需要針對單一受測者 自己與自己比較,在此將三個實驗的異同整理成表 3.6。 表 3.6 三個實驗重要設計之比較 實驗一 實驗二 實驗三 實驗目的 比較有力輔助與沒有 力輔助訓練的情況 下,訓練前後的差 異。 有效的控制移動時 間。 對單一受測者,觀察 有無力輔助時,行為 表現、生理訊號有何 變化。 分析對象 受測者分群比較 受測者分群比較 受測者自我比較 限速球 無 有 有 重走機制 軌跡偏移變差 軌跡偏移變差 軌跡球跟限速球距離 過遠 力牆給予 的方法 雙邊力牆,力量較小 雙邊力牆,力量較小 外側單邊力牆,力量 為雙邊力牆的 3 倍3.3.1 實驗設計
在實驗設計概念上,如圖 3.17 所示,受測者熟悉環境之後,我們先請他走 10 圈,在第 11 圈~第 90 圈,這 80 圈裡面,會有 40 圈具有力輔助,會有 40 圈 沒有力輔助,以隨機的方式分配,然後請受測者再走 10 圈。在實驗三我們所需 要分析的資料,就在於這中間的 80 圈,我們將這 80 圈的資料,依照有輔助跟沒 有輔助依序排列,分成兩組,利用統計的方法確認他們在移動時間上沒有差異之 後,比較此兩組資料之間在軌跡偏移上是否有顯著差異,從而驗證力輔助有其效 果存在。 圖 3.17 實驗三之概念圖 基於實驗二沒有良好的重走機制,使得受測者的移動時間沒有固定在相同的 範圍內,所以在實驗三改善了重走的機制,受測者所走的正方形之邊長為 170 單 位,如果當受測者所操作的軌跡球,與限速球之間的距離超過 1/3 的時候,那麼 受測者便會被要求重新行走,在經過的口頭告知之後,實際上受測者重走出現的 次數非常的少,或者經過 1~2 次重走之後,便可以跟隨限速球跟得非常的好, 10trials 80trials = random(40有力輔助 +40無力輔助) 10trials Assisting …… . Non-assisting受測者資料如表 3.7 所示,我們選擇了 5 男 6 女 11 位年輕學生族群來從事我們的 實驗,年齡範圍在 19~24 歲之間,除了第一名受測者重走率比較高之外,S070530 重走發生在第十一圈 2 次、第十三圈 1 次。S070608 重走發生在第一圈 1 次。 S070611 重走發生在第一圈 2 次。S070612 重走發生在第一圈 2 次、第三圈 1 次, 雖然重走會造成資料之刪除,但因我們要分析的數據是第 11~90 圈,除了第一 名受測者之外,刪除實驗資料應該不會對於最後的實驗結果造成太大的影響,實 驗詳細流程如圖 3.18 所示。 表 3.7 實驗三受測者名單 受測者編號 性別 年紀 限速球 時間 重走 率 受測者編號 性別 年紀 限速球 時間 重走 率 S070518 男 24 16 秒 15.2% S070606 女 23 16 秒 0% S070522_S1 男 24 15 秒 0% S070608* 男 19 16 秒 0.9% S070522_S2 男 23 14 秒 0% S070611* 女 24 16 秒 1.9% S070522_S3 女 21 16 秒 0% S070612* 女 23 16 秒 2.9% S070529 女 22 15 秒 0% S070613 女 23 16 秒 0% S070530 男 23 12 秒 2.9% 註解:*代表重走皆發生在 trial 01~trial 03
![圖 1.2 實驗場景圖 圖 1.3 場景軌跡、實際軌跡及軌跡偏移(Error)示意圖 當受測者在場景當中移動的時候,為了讓受測者可以行走的更好(軌跡偏移 降低)與為了讓受測者學習的更快,我們加入力輔助的機制,在有力輔助的情況 下,會給予隱形力牆輔助,意即當受測者軌跡偏移的時候,會受到一股力量輔助, 好像撞到牆壁一樣,隨之引導回軌跡的中央,為何稱為隱形的力牆?因為受測者 在視覺上面,並不會感到有所差異[18,19],但是在手部的力感上面,卻可以感受 到有股力量。圖 1.4(a)代表沒有力輔助的情況,圖](https://thumb-ap.123doks.com/thumbv2/9libinfo/8260187.172119/18.892.253.668.110.744/實驗場當受測中移動當受時候會受到一股力量輔助好像撞到牆壁以感.webp)




![圖 2.5 二頭肌(biceps)肌肉位置 [34]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8260187.172119/26.892.227.667.429.1025/圖25二頭肌biceps肌肉位置34.webp)
![圖 2.6 尺側伸腕肌、橈側伸腕長肌肌肉位置 [34] 在量測貼電極前,必須先確定肌肉的位置以及肌肉表面的清潔,最好用磨砂 膏進行去角質的動作,這是避免雜訊的方法之一,確實地將電極貼在肌腹的位置 以保有最佳的訊號輸出,每次的實驗進行也必須確保兩電極間的距離為一固定 值,一般而言一至二公分都有人採用,而基於電極型式的考量,我們使用的是兩 公分左右的間距。在電極訊號線的部分也必須加以固定,根據我們的實驗得知, 訊號線的晃動會造成很大的雜訊,如果沒有確實地固定,會造成系統的不穩定; 由於除了二頭肌之外的兩條](https://thumb-ap.123doks.com/thumbv2/9libinfo/8260187.172119/27.892.243.649.107.708/之一確實電極間值一般而言二公分是兩公分左右間距在電極訊訊號線.webp)