Real-Time Access Control and Reservation on
B-Tree Indexed Data*
TEI-WEI KUO [email protected]
Department of Computer Science and Information Engineering, National Taiwan University, #1 Roosevelt Rd., Sec. 4, Taipei, Taiwan 106, ROC
CHIH-HUNG WEI [email protected]
Department of Computer Science and Information Engineering, National Chung Cheng University, Chiayi, Taiwan 621, ROC
KAM-YIU LAM [email protected]
Department of Computer Science, City University of Hong Kong, Kowloon, Hong Kong
Abstract. This paper proposes methodologies to control the access of B+-tree-indexed data in a batch and firm real-time fashion. Algorithms are proposed to insert, query, delete, and rebalance B+-tree-indexed data based on the non-real-time algorithms proposed in Kerttu, Eljas, and Tatu (1996) and the idea of priority inheritance (Sha, Rajkumar, and Lehoczky, 1990). We propose methodologies to reduce the number of disk I/O to improve the system performance without introducing more priority inversion. When the schedulability of requests with critical timing constraints is highly important, we propose a mechanism for data reservation based on the idea of preemption level and the Stack Resource Policy (Baker, 1990). The performance of our methodologies was evaluated by a series of experiments, from which we have obtained encouraging results.
Keywords: real-time data access, B-tree index, batch operations, data reservation, priority inversion.
1. Introduction
With the advances in communication and multimedia technologies, new database appli-cations are emerging in recent years. Many of the new appliappli-cations, such as internet programmed stock trading systems, tele-medicine systems, digital library, and computer-integrated manufacturing systems (Andresen et al., 1996; Choy and Morris, 1996; Grossman et al., 1995; Lam, Kuo, and Shu, 1998), require “real-time” access to different kinds of infor-mation such as stock data, traffic conditions, and patient status. Although the transactions in these applications may not have hard real-time deadlines, they usually have different degrees of real-time response time requirements. It is of paramount importance to have a predictable system performance to make such application systems useful. For example, in a programmed stock trading system, a late response to a trading query may result in a loss of a good trading opportunity (Lam, Kuo, and Shu, 1998). How to meet the response time con-straints of transactions is becoming an important concern of these application systems. In addition to the deadlines associated with the transactions, another important characteristic of the applications is that they usually need to manage a large number of data items.
* A preliminary version of this paper appeared in the Proceedings of IEEE 15th International Conference on Data Engineering, 1999.
In the past decades, different index structures have been proposed for database systems (Bernstein, Hadzilacos, and Goodman, 1987; Elmasri and Navathe, 1994). Amongst the proposed index structures, B-tree is one of the most popular and efficient index structures. Mechanisms based on locking are usually used to control concurrent access of a B-tree index in order to maintain database consistency. Various B-tree access algorithms, e.g., (Bayer and Schkolnick, 1977; Lehman and Yao, 1981; Mohan and Levine, 1992; Mond and Raz, 1985), have been proposed with the objective to increase the concurrency in accessing the index and the data items so that the mean data access delay can be minimized. Although the B-tree index structure and the proposed algorithms have been shown to be very efficient for traditional database systems such as banking systems, airline reservation, and accounting systems, they have not been successfully applied to database systems with stringent response time requirements. As shown in many previous research in real-time database systems (RTDBS), e.g., Kuo (1994), Sha et al. (1991), a high concurrency of transaction execution may not guarantee the satisfaction of transaction deadlines or the minimization of deadline violations. B-tree algorithms which aim at maximizing the concurrency of transaction execution may not be able to guarantee the urgency of transaction deadlines. The impacts of priority inversion can seriously increase the chance of deadline violations as the blocking time of a transaction execution is often unbounded for the B-tree algorithms proposed for traditional database systems, where priority inversion is a situation in which a higher priority (or urgent) transaction is blocked by a lower priority (or less urgent) transaction. Priority cognitive access algorithms for B-tree indexed data are needed to manage the priority inversion problem and meet the urgency of transaction executions.
Although many researchers have proposed various real-time concurrency control proto-cols, e.g., (Abbott and Garcia-Molina, 1988; Bestavros, 1994; Dipippo and Wolfe, 1993; Kuo and Mok, 1993; Liang, Kuo, and Shu, 1997; Lin and Son, 1990; Peng and Lin, 1996; Sha et al., 1991; Xiong et al., 1996), most of them assume that a real-time database consists of data items or objects without any index structure. Many of proposed concurrency con-trol protocols can only be applied to RTDBS consisting of a fixed set of data items or/and a fixed set of transactions, e.g., Kuo and Mok (1993), Liang, Kuo, and Shu (1997), Sha et al. (1991). As the demand of timing constraints is increasing in traditional (or modern) database systems in recent years, such as banking systems, digital library, and stock trading systems, many researchers have started to consider how to provide real-time performance to transactions in database systems which have stringent response time requirements. Such systems, e.g., digital library, stock trading systems, or banking systems, may have a tremen-dous number of disk-resident data objects/records and usually have indices to facilitate and speed up data accesses. The issue of real-time index concurrency control was first proposed and addressed in Goyal et al. (1995), and a performance evaluation of a variety of B-tree concurrency control protocols was made for single-key index operations. In this paper, we extend the prior work to consider real-time access control for batch (multi-key) operations. Batch algorithms based on non-real-time algorithms in Kerttu, Eljas, and Tatu (1996) and the idea of priority inheritance (Sha, Rajkumar, and Lehoczky, 1990) are proposed to signif-icantly improve the performance and the schedulability of real-time disk-resident database
systems. A relaxed B+-tree structure (Kerttu, Eljas, and Tatu, 1996) is adopted to reduce
deferred local rebalance operations. To further reduce the number of disk I/O and im-prove the system performance, methodologies to share nodes among batch algorithms are proposed without introducing more priority inversion. When the response time of highly critical transactions must be considered, we propose a mechanism to reserve data based on the idea of preemption level and the Stack Resource Policy (Baker, 1990), where highly critical transactions are often more valuable and have urgent deadlines. The performance of our methodologies is evaluated by a series of simulation experiments, for which we have obtained very encouraging results.
The major contributions of this work are as follows: (1) A relaxed and less blocking B+
-tree index structure is explored for real-time and batch processing of user requests.(2) Real-time batch algorithms with data sharing mechanisms are proposed to improve the
per-formance of a firm real-time disk-resident B+-tree-indexed database without introducing
more priority inversion. The value of a firm real-time transaction will be totally lost after its deadline and it has to be aborted immediately. (3) The idea of preemption level is explored for data reservation to improve or guarantee the performance of highly critical real-time transactions.
The rest of the paper is organized as follows: Section 2 reviews the previous work on the real-time concurrency control protocols and the B-tree algorithms. Section 3 defines the
B+-tree index structure, the transaction model, and important terminology. In Section 4,
we propose basic insertion, deletion, query, and rebalance algorithms for firm real-time and batch processing of user requests. We also provide methodologies to reduce the number of
disk I/O. Section 5 describes a data reservation and scheduling mechanism based on the
idea of preemption level (Baker, 1990) for highly critical real-time transactions. Section 6 provides simulation results to demonstrate the capability of the proposed methodologies. Section 7 is the conclusion.
2. Related Work
2.1. Concurrency Control Algorithms for B-Tree Indexed Data
B-tree indexing and retrieval has been a preferred access method for large-scale commer-cial database systems. A number of highly efficient B-tree algorithms, e.g., (Bayer and Schkolnick, 1977; Lehman and Yao, 1981; Mohan and Levine, 1992; Mond and Raz, 1985), for data insertion, deletion, and query have been proposed. The algorithms can be classified as either top-down or bottom-up. Algorithms in the top-down class (e.g., Bayer and Schkolnick, 1977; Mond and Raz, 1985), traverse a B-tree from the root to the leaf using lock-coupling and different locking modes (such as exclusive, shared, and intention shared locks). In order to improve the concurrency, insert and delete operations often use weaker locks such as shared locks for index nodes. However, when splitting or merging of any node may be resulted, an insert or delete operation is restarted with a restrictive locking mode such as “shared and intention exclusive” locks.
Algorithms in the bottom-up class (e.g., Lehman and Yao, 1981), usually first traverse a B-tree from the root to the leaf using shared locks. Insertion and deletion algorithms need to lock the leaf node in an exclusive mode. When splitting or merging may be resulted,
insertion and deletion algorithms will traverse backward from the leaf to some proper node, e.g., the root, using exclusive locks to restructure the B-tree. Some algorithms (e.g., Lehman and Yao, 1981; Mohan and Levine, 1992), depend on relaxed B-tree structures to increase the concurrency. Performance study in Johnson and Shasha (1990), Srinvasan and Carey (1991) shows that the B-Link algorithms in Lehman and Yao (1981) have the best performance for single index operations, where a single index operation inserts, deletes, or queries one data item at a time. B-Link algorithms rely on a relaxed B-tree structure which uses links to chain all the nodes at each level. Insert (and delete) operations involving node splitting (and merging) are done in two phases. In other words, a newly split node is inserted into the appropriate parent after the insertion of the data. An appropriate entry deletion occurs later at the next higher level of the B-tree after the deletion of data.
2.2. Real-Time Concurrency Control for B-Tree Indexed Data
Although a number of researchers have proposed protocols for real-time access control of data items (Abbott and Garcia-Molina, 1988; Dipippo and Wolfe, 1993; Haritsa, Carey, and Livny, 1990; Kuo and Mok, 1992; Kuo and Mok, 1993; Liang, Kuo, and Shu, 1997; Lin and Son, 1990; Peng and Lin, 1996; Sha et al., 1991; Xiong, 1996), the only prior work that we are aware of on real-time access control is Goyal et al. (1995), Haritsa and Seshadri (2000). In these papers, the performance of various B-tree algorithms was studied. They show that the B-Link algorithms performed better than many other well-known B-tree algorithms in reducing the number of deadline violations, especially when a load control component was adopted. The load control component prevents new operations from entering the system whenever the utilization of some bottleneck resource, e.g., disks, exceeds some threshold. Although effective algorithms for single index operations have been proposed, it is always more profitable to insert, delete, or query data items in a batch if several keys are provided at a time. There are typical applications, such as digital library, full-text retrieval, and newspaper house application (Andresen et al., 1996; Choy and Morris, 1996; Grossman et al., 1995; Lam, Kuo, and Shu, 1998), in which batch operations are badly needed.
3. B-tree Index Structure and Transaction Model
3.1. B+-Tree Index
Let a database consist of a collection of data objects indexed in B+-tree structures. B+-tree is a B-tree-based search tree, which is used to speed up the retrieval of records or data objects
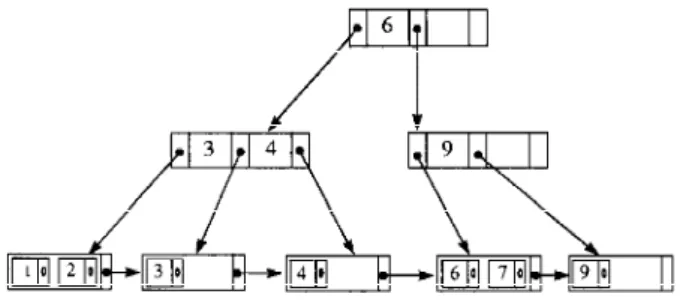
in response to various search conditions (Please see Figure 1). Each node in a B+-tree of
order p, except for a special node called the root, has one parent node and at most p child nodes. A node which has no child node is called a leaf node. A non-leaf node is called an internal node. Each internal node in a B+-tree contains at most p− 1 search values and p pointers in the order
Figure 1. A B+-tree of order 3.
Figure 2. A relaxed B+-tree.
where q ≤ p. For all search field values X in the subtree pointed by Pi, we have Ki−1 ≤
X < Ki for 1< i < q, X < Kifor i = 1, and Ki−1≤ X for i = q (Elmasri and Navathe, 1994). Each leaf node is of the form
hhK1, Ptr1i, hK2, Ptr2i, . . . , hKq−1, Ptrq−1i, Pnextii
where K1 < K2 < · · · < Kq−1. Each ptri is a data pointer which points to the record or
data object whose search field value is Ki(Elmasri and Navathe, 1994). A leaf or internal
node is said to have k empty slots when k= p −q. A node is of level i if there are i internal
nodes (excluding the node itself) between the root and the node. The height of a B+-tree is
the maximum level of nodes in the tree plus one. For example, the root and the leaf nodes in Figure 1 are of levels 0 and 2, respectively. The height of the tree is 3. For the purpose of this paper, we use the terms “record” and “data object” interchangeably.
In this paper, we aim at maximizing the system concurrency and reducing the blocking
time of transaction executions. A relaxed B+-tree (Nurmi, Soisalon-Soininen, and Wood,
1987) is adopted, as shown in Figure 2. A relaxed B+-tree is a B+-tree in which some
balance conditions of a B+-tree are relaxed so that the tree can later be easily rebalanced
Figure 3. A rebalanced relaxed B+-tree.
Insertions may generate overflow temporary nodes which must be balanced later. An overflow temporary node is a node at which no parent node is directly pointing to. For
example, the insertion of data with key 3 in the B+-tree shown in Figure 1 causes the
overflow of the leaf node which contains data pointers for data with keys 1 and 2. The insertion overflow results in the creation of an overflow temporary node which contains a data pointer for data with key 3, as shown in Figure 2. The tree will be rebalanced later
by modifying the proper internal nodes and become a conventional B+-tree, as shown in
Figure 3. The search of a key is carried out exactly in the same way as in conventional B+
-trees except that searching over overflow temporary nodes might be needed. For example,
the search of data with key 3 in the B+-tree shown in Figure 2 will first reach the leaf
node which contains data pointers for keys 1 and 2 and, then, go right on a sibling link to the overflow temporary node which contains a data pointer for key 3. We refer interested readers to Nurmi, Soisalon-Soininen, and Wood (1987) for details. For the rest of this
paper, our usage of the term “B-tree” refers to the “relaxed B+-tree” variant.
3.2. Transaction Model
We are interested in real-time access control of a database system, such as stock trading system or news server, which contains a large amount of disk-resident data indexed in
a B+-tree structure. The system contains a dynamic workload which consists of a large
number of query and insert transactions. An insert transaction is responsible for inserting a collection of data objects into the database. A query transaction retrieves data objects from the database according to the key values provided by users. Transactions are assumed to be generated by users in terms of simple interfaces, such as home pages via a web-based browser. For example, a stock broker can look up the face values of some stocks by supplying codes to the system. A student may look up the scores of his/her courses taken in this semester via a browser, and the personnel of the registration office can insert records of course scores for students. Transactions in the above examples may need different degrees of response time requirements. Even for a student’s inquiry on his/her course scores, it should not take a long time. Otherwise, the student will either quit from the inquiry, or complain to the registration office or the computation center. With the motivations of the
above example systems, we propose to define a transaction as a simple collection of keys to have good flexibility in proposing effective data access control protocols.
A query transaction Qiis formally defined as a tuple of key values
(key1, key2, . . . , keyni),
where each key value is for index search of a specific data object interested to a user, and keyj6= keykfor j 6= k. The results of a query transaction is a tuple
(data1, data2, . . . , datai),
where dataj is the image of the data object with a key value equal to keyj. If there is no
data object with a key value equal to keyj, then datajis null. An insert transaction Iiis formally defined as a tuple of pairs
((key1, data1), (key2, data2), . . . , (keyni, datani)),
where each dataj is associated with a key keyi for insertion into a B+-tree index structure,
and keyj 6= keyk for j 6= k. The execution of an insert transaction not only causes the
inclusion of the data objects into the database but also results in correct modification of the
B+-tree index structure. A delete transaction is a tuple of key values
(key1, key2, . . . , keyni),
where each key value keyj is for deleting a specific data object with the key value, and
keyj 6= keyk for j 6= k. The execution of a delete transaction may not only cause the removal of the data objects from the database but also result in the modification of the B+-tree index structure.
For the purpose of this paper, only real-time access control on a single B+-tree index
structure is considered. The access control proposed in this section can be applied to
multiple B+-tree index structure straightforwardly.
3.3. Definitions
For the purpose of this paper, we shall first define the following terminology:
Definition 1 (Overflow Node). An overflow node is a node at which no parent node is directly pointing to, and it is not the root. A non-overflowed node is not an overflow node. An overflow node can be a leaf node, e.g., the node which contains a data pointer for data
with key 3 in the B+-tree shown in Figure 2, or an internal node.
Definition 2 (Sibling Node). A node is the right sibling node of another node if the latter node has a link, e.g., pnext, directly pointing at the former. The latter is called the left sibling node of the former. These two nodes are sibling nodes of each other.
Definition 3 (Control Set). The control set of a non-overflowed node nodei is the set of nodes CS(nodei) = {nodej} in which
1. The only non-overflowed node in CS(nodei) is nodei.
2. For any overflow node node0in CS(nodei), there must exist a sequence of nodes noden1,
noden2, . . . , nodenm in CS(nodei) such that nodenk+1is the right sibling node of nodenk
for 1≤ k < m, and noden1and nodenm are nodeiand node
0, respectively.
Note that, when the size of a control set is one, the control set only contains a non-overflowed node. A control set consists of a non-non-overflowed node and zero or more overflow nodes.
Definition 4 (Ancestor Node). A node nodeiis an ancestor node of another node nodejin a B+-tree if there exists a sequence of nodes node01, . . . , node0nsuch that nodeiis either the parent node of nodei+1or the left sibling node of nodei+1for i < n, and the level of nodei is lower than the level of nodej, where nodeiand nodejare node01and node0n, respectively. The definition of a control set is to simplify the lock management of nodes. Under the algorithms proposed in the following sections, a transaction can lock all the nodes in the control set of a non-overflowed node by locking the non-overflowed node. We define the key set of a control set as the set of keys which can possibly appear in the leaf nodes of the sub-trees pointed by the nodes in the control set. When a set of keys to be accessed by a transaction overlaps with the key set of a control set, the transaction should lock the control set.
Definition 5 (Key Set of a Control Set). The key set KS(CSi) of the control set CSi of a
non-overflowed node nodeiis defined as follows:
• If nodei is the root, then KS(CSi) equals to the universe of the keys.
• If nodei has a parent node nodej = hP1, K1, P2, K2, . . . , Pq−1, Kq−1, Pqi, and Pk points to nodei, then KS(CSi) is defined as follows:
– If 1 < k < q, then KS(CSi) equals to the set of keys between Kk−1 and Kk including Kk−1but excluding Kk.
– Suppose k = 1. Let node0j= hP10, K10, P20, K20, . . . , Pq00−1, Kq00−1, Pq00i be the closest
ancestor node of nodeiwhich satisfies either one of the following conditions first:
1. node0jhas a pointer Px0pointing at a subtree which contains nodei and x > 1.
2. node0j is an overflow node and has a pointer Px0 pointing at a subtree which
contains nodeiand x = 1.
If Condition 1 is satisfied first, then KS(CSi) equals to the set of keys between Kx0−1 and K1 including Kx0−1 and excluding K1. If Condition 2 is satisfied first, then KS(CSi) equals to the set of keys between K ”q”−1 and K1 including K ”q”−1and excluding K1, where nodey = hP”1, K ”1, P”2, K ”2, . . . , P”q”−1, K ”q”−1, P”nexti is the left sibling node of node0j, and P”nextis a node pointer pointing to the right sibling node, if it exists, or a null pointer. If there does not exist such ancestor node satisfying either of the conditions, then KS(CSi) equals to the set of keys less than K1.
– If k = q, and node0j = hP10, K10, P20, K20, . . . , Pq00−1, Kq00−1, Pq00i is the closest
an-cestor node of nodei which has a pointer Px0pointing at a subtree which contains
nodei and x < q0, then KS(CSi) equals to the set of keys between Kq−1and Kx0 including Kq−1and excluding Kx0. If there does not exist such ancestor node, then KS(CSi) equals to the set of keys no less than Kq−1.
The key set KS(CSi) of a control set CSiis exclusively partitioned into the key sets of the nodes in the control set KS(CSi) according to definitions of relaxed B+-tree nodes (Nurmi,
Soisalon-Soininen, and Wood, 1987). For example, let nodei = hP1, K1, P2, K2, . . . ,
Pq−1, Kq−1, Pnexti be a non-overflowed node and has a right sibling node in the control
set CSi. The key set of nodei is the set of keys in the key set KS(CSi). If nodei =
hP1, K1, P2, K2, . . . , Pq−1, Kq−1, Pnexti has a left sibling node nodej = hP10, K10, P20, K20,
. . . , P0
q0−1, Kq00−1, Pnext0 i and a right sibling node, then the key set of nodeiis the set of keys in the key set KS(CSi) which is no less than Kq00−1 (including Kq00−1). If the size of the control set KS(CSi) is one, then the key set of the only node in the control set CSiequals to the key set KS(CSi).
4. Real-Time Batch Algorithms
4.1. Overview
The purpose of this section is to first propose basic insertion, query, deletion, and rebalancing
algorithms for batch firm real-time access of B+-tree-indexed data. We shall then further
improve the algorithms in reducing the number of disk I/O since disk I/O is notoriously
slower than main memory data access. Mechanisms will be proposed to share data and locks among transactions. In Section 5, additional scheduling disciplines will be proposed to guarantee the schedulability of highly critical real-time transactions.
The basic insertion, query, deletion, and rebalancing algorithms are based on the non-real-time algorithms in Kerttu, Eljas, and Tatu (1996). A breadth-first-search (BFS) traversal mechanism with priority inheritance (Sha, Rajkumar, and Lehoczky, 1990) is adopted to improve the system performance and manage the priority inversion problem. With priority inheritance, if there is a lock conflict, and the priority of the lock-holding transaction is lower than the priority of the lock-requesting transaction, then the priority of the lock-holding transaction will be raised up to that of the lock-requesting transaction. The lock-requesting transaction will be blocked until the lock-holding transaction releases the lock. We adopt
the B+-tree structure in Kerttu, Eljas, and Tatu (1996) except that each non-overflowed
child node has a pointer pointing back to the parent node for the efficiency of the proposed algorithms. No splitting of any node is needed unless it is overflowed, and no merging of any node will occur unless the node is empty.
Let the system be associated with a queue Work-Queue of ready transactions sorted in an increasing order of their absolute deadlines, where each transaction is running the query, insertion, deletion, or rebalance algorithms proposed in the following sections. The transaction at the beginning of the Work-Queue is assigned the processor. The earliest deadline first (EDF) scheduling algorithm (Liu and Layland, 1973) is adopted to schedule
transactions for execution. There are two kinds of locks in the system: read and write locks. A transaction is required to read-lock (or write-lock) a node before it initiates any disk I/O to read the node from (or update the node into) the disk. Read locks are compatible to each other. Locks of nodes are managed by the lock manager of the system. After a transaction
initiates a disk I/O, and before the disk I/O completes, the transaction is considered as
blocked and will release the processor. Other ready transactions in the Work-Queue may
compete for the processor. When the disk I/O request of a transaction is satisfied, the
transaction is inserted into the Work-Queue.
It is assumed that disk I/O requests are serviced in a non-preemptive priority-ordered
fashion. Theorems regarding priority inversion will not count the number of priority
in-versions due to disk I/O. (The number of priority inversions for each I/O request is one in
this paper if disk I/O requests are serviced in a non-preemptive priority-ordered fashion. In
other words, the number of priority inversions for an entire transaction for disk I/O requests
can be as large as the number of disk accesses. Such a situation exists when the I/O system
is very busy.)
4.2. Basic Protocols
4.2.1. Batch-Query Algorithms
When a query request (key1, key2, . . . , keyni) with deadline di arrives in the system, a
query transactionτiq, which will execute Algorithm Batch−Query((key1, key2, . . . , keyn
i),
ROOT, di), is inserted into the Work-Queue. τ q
i will be assigned to use the processor if it
is the ready transaction with the highest priority (in the Work-Queue).
Procedure Batch-Query(key set, node, deadline)
Input: key set= (key1, key2, . . . , keyn
i)
node: starting node in the tree. Begin
node li st = φ; R-Lock(node);
EnQueue(node list, (key set, node));
While node list is not empty
request = DeQueue(node list); /* request= (key set, node) */
Read Node(request.node); /* disk I/O for a tree node */
If request.node is a leaf node Then
For each c-nodei in the control set of request.node Do
Read Data(request.key set, c-nodei); /* disk I/O for data */ Else
For each c-nodejin the control set of request.node (from left to right) Do
Child Set= {nodei|nodei is a child node of c-nodej
which includes a subset key setiof keys in request.key set};
R-Lock(child nodei);
EnQueue(node list,(key seti, child nodei)); EndFor; EndDo; EndIf; Unlock(request.node); EndWhile; End
Algorithm Batch-Query is generalized from the query algorithm in (Kerttu, Eljas, and Tatu, 1996) by considering batch retrievals of data. Algorithm Batch-Query starts searching
data with keys in key set from node node which is usually the root of the B+-tree in the
basic protocols. The algorithm traverses the B+-tree and read-locks nodes in a breadth-first
search (BFS) fashion starting from node. In the beginning of the algorithm, node is inserted into a first-in-first-out BFS queue. During each iteration, a node node is popped out of the queue. If node is a leaf node, then node is read from the disk to retrieve the needed data. If node is an internal node, then all child nodes of the nodes in the control set of node are locked and inserted into the first-in-first-out BFS queue for node locking and accessing in the subsequent iterations. Note that each node must be read-locked before it is read from the disk. Algorithm Batch-Query only read-locks non-overflowed nodes. When Algorithm Batch-Query read-locks a non-overflowed node, all overflow nodes in the control set of the non-overflowed node are implicitly read-locked. Algorithm Batch-Query unlocks a node when all of its child nodes are read-locked. Note that the BFS traversal style may result in the blocking of a higher-priority transaction by an entire lower-priority transaction. The deployment of the priority inheritance scheme is necessary to reduce the entire blocking time of a transaction as other middle-priority transactions may arrive. Suppose that the priority inheritance scheme is not adopted, then many middle-priority transactions may arrive and preempt the execution of the lower-priority transaction which blocks the higher-priority transaction. Such arrivals of middle-higher-priority transactions can be unlimited. In other words, a higher-priority transaction may be blocked by an unbounded number of priority inversions. It will seriously damage the response time of a real-time system.
As astute readers may notice, Algorithm Batch-Query can be slightly modified to support range queries. The key set of a query transaction must be sorted and revised as a set of key
ranges, and the algorithm should look for the overlapping of key setiand the keys of each
node in the B+-tree. The complexity and properties of the algorithm will remain.
4.2.2. Batch-Insert Algorithms
When an insertion request τiI = ((key1, data1), (key2, data2), . . . , (keyni, datani)) with
deadline di arrives in the system, an insert transaction τiI which will execute Algorithm
Batch−Insert(((key1, data1), (key2, data2), . . . , (keyni, datani)), ROOT, di) is inserted into
the priority-sorted Work-Queue of the system.τI
i will be assigned the processor if it is the highest-priority ready transaction (in the Work-Queue).
Algorithm Batch-Insert traverses the B+-tree index and locks nodes in a BFS fashion starting from node. During each iteration, a node node is popped out of the BFS queue, and its child nodes are visited. Different from Algorithm Batch-Query, nodes of the highest two levels, including some leaf nodes, are write-locked because data may be inserted into leaf nodes. Algorithm Insert-Data is called whenever some data is inserted into a leaf node. If any overflow node is created because of the insertion, then a rebalance transaction with a proper deadline must be inserted into the Work-Queue. The batch-delete algorithm is similar to the batch-insert algorithm except that data are deleted. The algorithm is included in Appendix B.
Procedure Batch-Insert(key&data set, node, deadline)
Input: key&data set= ((key1, data1), (key2, data2), . . . , (keyni, datani))
node: starting node in the tree. Begin
If node is a leaf node Then
W-Lock(node);
Inset-Data(key&data set, node, deadline); Return;
Else IF node is the parent node of a leaf node W-Lock(node);
Else
R-Lock(node); EndIF;
node list= φ;
EnQueue(node list, (key&data set, node)); While node list is not empty
request = DeQueue(node list); /* request= (keyset, node) */
Read Node(request.node); /* disk I/O for a tree node */
For each c-nodejin the control set of request.node Do
Child Set= {nodei|nodei is a child node of c-nodej
which includes some keys in request.key&data set};
Let key&data setibe a subset of request.key&data set whose keys are in nodei;
EndDo;
If request.node is the parent node of a leaf node
Then
For each child nodeiin Child Set (from left to right) Do
W-Lock(child nodei); /* child nodeiis a leaf node. */
Inset-Data(key&data seti, child nodei, deadline);
Unlock(child nodei);
EndFor; Else
If request.node is the grand parent node of a leaf node
For each child nodei in Child Set (from left to right) Do
W-Lock(child nodei);
EnQueue(node list,(key&data seti, child nodei)); EndFor;
Else
For each child nodei in Child Set (from left to right) Do
R-Lock(child nodei);
EnQueue(node list,(key&data seti, child nodei)); EndFor; EndIf; EndIf; Unlock(request.node); EndWhile; End
Procedure Insert-Data(key&data set, leaf node, deadline)
Input: key&data set= ((key1, data1), (key2, data2), . . . , (keyni, datani))
leaf node: a w-locked leaf node. Begin
If the size of the control set of leaf node is larger than one Then
Insert data and keys in key&data set to the proper node in the control set of leaf node; Split any overflowed nodes and link them together;
/* All data are sorted, and all nodes are linked according to the definitions of B+-tree control set */ Else
Insert data and keys to leaf node; If leaf node needs splitting
Then
Split leaf node and link them together;
/* All data are sorted, and all nodes are linked according to the definitions of B+-tree control set */ parent node = the parent node of leaf node;
Add-Work-Queue(Job(Rebalance,parent node, leaf node, deadline)); /* A new request is inserted! */
EndIf; EndIf;
Unlock(leaf node); End
4.2.3. Rebalance Algorithms
Due to insertion and deletion of data, overflow nodes may be created, and some nodes may become empty. The existence of overflow and empty nodes incurs extra overheads in the
traversal of the B+-tree. Although delaying the rebalancing of tree is allowed in a relaxed
B+-tree (Nurmi, Soisalon-Soininen, and Wood, 1987), the deterioration of B+-tree, because
of the excessive number of overflow nodes and empty nodes, may offset the advantages
of the relaxed B+-tree in reducing the number of blocking of transactions. This section is
meant to describe the rebalance algorithm.
The rebalance algorithm, called Algorithm Rebalance, is the same as the non-real-time rebalance algorithm in Kerttu, Eljas, and Tatu (1996). As required in Kerttu, Eljas, and Tatu (1996), the system only allows one rebalance transaction executing at a time. In other words, the execution of a rebalance transaction will block the executions of other rebalance transactions. The creation of overflow nodes by batch-insert transactions and empty nodes by batch-delete transactions will insert a proper rebalance transaction in the Work-Queue. Each rebalance transaction is assigned a deadline, which is, in general, very loose. A rebalance transaction only targets at rebalancing a node and its child nodes’ control set. If further rebalancing is needed at a higher level, another rebalance transaction is inserted in the Work-Queue again.
Please see Appendix A for detailed definitions of the rebalance algorithm.
4.2.4. Properties
THEOREM1 The system is deadlock-free.
Proof: Since all transactions lock nodes in the B+-tree are from the root to the leaves and from the left to the right, the system is deadlock-free.
THEOREM2 The maximum number of priority inversion for a higher-priority batch-query transaction is not larger than the number of transactions which have write-locked some nodes.
Proof: Since a batch-query transaction only read-locks nodes in the B+-tree, and write-locks are incompatible with any write-write-locks or read-write-locks, a higher-priority batch-query transaction can only be blocked by transactions which have write-locked some nodes.
Note that the number of transactions which have write-locked any B+-tree node is limited
by one plus the number of nodes which point to leaf nodes, where one stands for the write-lock of a rebalance transaction.
THEOREM3 The maximum number of priority inversion for a higher-priority batch-insert
(or batch-delete) transaction is no larger than the sum of the number of transactions which have write-locked some nodes and the number of lower-priority query transactions which have read-locked any nodes of the highest two levels.
Proof: The correctness of this theorem follows directly from the fact that a batch-insert (or
batch-delete) transaction may write-lock nodes of the highest two levels and read-lock the other nodes. In other words, a batch-insert (or batch-delete) transaction can only be blocked by transactions which have locked any nodes of the highest two levels or write-locked any nodes.
THEOREM4 The maximum number of priority inversion for a higher-priority rebalance transaction is no larger than the number of active lower-priority non-rebalance transactions plus one.
Proof: The correctness of this theorem follows directly from the following fact: A re-balance transaction must lock a parent node and a child node (to implicitly write-lock its control set) to restructure pointers and keys between the parent node and the nodes in the control set of the child node. Since write-locks are incompatible to any read-locks and write-locks, and only one rebalance transaction execution is allowed at a time, a rebalance transaction may be blocked by any active lower-priority non-rebalance transaction (which may either read-lock or write-lock some nodes) and one rebalance transaction.
4.2.5. Remark
As astute readers may point out, since each non-overflowed child node has a pointer pointing back to the parent node, an action related to node splitting or merging may result in the parent pointers of a large number of nodes to be updated if the tree has a large fan-out. Such updating can seriously damage the performance of the system. However, the proposed
algorithms can be slightly modified to handle the situation where no node in the B+-tree is
associated with a parent node (Obviously, the definitions of overflowed and non-overflowed nodes will need to be changed accordingly). The modifications of the algorithms are as follows:
• No change is necessary for Algorithm Batch-Query because the traversal of the tree is
from the root to the leaves.
• Supply the parent node of the leaf node in each invocation of Procedure Insert-Data in
Al-gorithm Batch-Insert. In other words, replace Insert-Data(key&data seti, child nodei, deadline) with Insert-Data(key&data seti, child nodei, request.node, deadline). Then remove the statement “parent-node = the parent node of a leaf node” from Procedure Insert-Data because the parent node of a leaf node is provided in the invocation.
• Supply the parent node of the leaf node in each invocation of Procedure
Delete-Data in Algorithm Batch-Delete. In other words, replace Delete-Delete-Data(key&data seti,
child nodei, deadline) with Delete-Data(key&data seti, child nodei, request.node, deadline). Then remove the statement “parent-node = the parent node of a leaf node” from Procedure Delete-Data because the parent node of a leaf node is provided in the invocation.
• Insert new statements at the very beginning of Algorithm Rebalance to search for the
parent node of parent node (starting from the root). Note that it must be done before Algorithm Rebalance write-locks parent node and child node to prevent the existence of any deadlock. Note that in the searching of the grand parent node, Algorithm Rebalance should not unlock a parent node before it locks the proper child node until it finds the grand parent node. We should also remove the following statement in Algorithm Rebalance because it does not need to exist any more:
“grand parent node = the parent node of parent node”
4.3. Starting-Search-Node Transformation and Node Sharing
The purpose of this section is to further improve the performance of the basic protocols in
reducing the number of disk I/O to meet the timing constraints of transactions since disk
is the slowest component in a computer system. Slight saving in disk I/O may boost the
performance of the system significantly. Two major methodologies are proposed: (1) The beginning node to start the processing of a transaction may be moved from the root of the B+-tree to some node of a higher level. (2) The contents of a node retrieved by a transaction from the disk can be cached for other transactions. No modification of any basic protocols proposed in the previous sections will be needed.
4.3.1. Starting-Search-Node Transformation
The basic protocols proposed in the previous sections start the processing of each transaction
from the root of the B+-tree to the leaf nodes which point to the data needed by the
transaction. The number of disk I/O for accessing each data is proportional to the height
of the tree, the location and number of overflow nodes. As astute readers may notice, many transactions tend to repeatedly lock and read the same nodes, e.g., the root and lower-level nodes. Since lower-level nodes are usually read-locked by transactions and may be needed by some other transactions as well, the system performance can be largely improved if the nodes retrieved by other transactions can be used to start the processing of another transaction from some node of a higher level instead of the root.
When a transaction is initiated, it is inserted into the Work-Queue with the starting search node as the root, e.g., Batch-Query(key set, root, deadline) or Batch-Insert(key&data set, root, di). Suppose that transaction τ read-locks nodeiand retrieves nodeifrom the disk. If
the system finds out that nodei contains the set of keys needed by some other transaction
τ0 in the Work-Queue, e.g., the key set in Batch-Query(key set, nodej, deadline) or the
key&data set in Batch-Insertion(key&data set, nodej, di), and the level of nodei is higher than the level of the current starting search node nodej of transactionτ0, then the starting search node of transactionτ0is replaced with nodei. For example, if transactionτ0= Batch-Query(key set, nodej, deadline) in the Work-Queue satisfies the above conditions, then the
system will replace it with Batch-Query(key set, nodei, deadline). In addition, the system
τ0. Note that the transaction does not know if the system has locked any node for it. When
transactionτ0later requests a read-lock on nodei, the system grants it immediately. The reason that the system must read-lock the starting search node for a transaction is to protect the transaction from any structure or node-content modification done by future rebalance or delete transactions. However, such read-locks may increase the number of priority inversion for rebalance or delete transactions. One novel solution is to reset the starting search node of a transaction back to the root if any higher-priority transaction requests a conflicting lock, i.e., write-lock, in the future, on the starting search node of the former transaction.
We should point out that the most urgent transactions should be either query, insert, or delete transactions instead of rebalance transactions, where rebalance transactions are for
restructuring the B+-tree. No transactions except rebalance transactions will write-lock any
nodes at a level lower than the highest two levels, including the leaf nodes, of the B+-tree. We surmise that the modifications of the starting search node for a transaction may improve the system performance significantly without increasing the number of priority inversion.
4.3.2. Node Sharing
This section is meant to further generalize the idea of batch access of B+-tree-indexed data. We shall provide a mechanism for transactions to share nodes retrieved by each another from the disks such that the decrease in transaction execution duration (because of less disk I/O) may improve the response time of transactions.
Let a transactionτ lock a (leaf or internal) node and read it from the disk at some time
point. If the set of keys accessed by some other transactionτ0overlaps with the set of keys
contained in the node, andτ and τ0will not access the node in any conflicting mode, then
the system may lock the node and cache the contents of the node on behalf of transaction
τ0. Note that transactionτ0does not know that the system has locked any node for it. When
transactionτ0requests a lock on nodei and tries to read it from the disk, the system grants the lock and returns the node immediately. The compatibility of locks issued or will be issued by any two transactions can be determined easily on the type of transactions and the level of a shared node.
Note that pre-locking of nodes by the system may also increase the number of priority inversion for urgent transactions, e.g., their deadlines are approaching. One novel solution is that the system unlocks and removes the cache for a node if some higher-priority transactions want to lock the node in any conflicting mode. Depending on the level of cached nodes and the ratio of query transactions in the system, the performance of this approach varies. In Section 6, we shall demonstrate the benefits of this approach in reducing the number of deadline violations in the system.
4.3.3. Properties
THEOREM5 The system with node sharing and starting-search-node transformations is deadlock-free.
Proof: Since the read-locks of nodes for node sharing and starting-search-node
transfor-mations will be released by the system, when conflicting lock requests occur, the correctness of this theorem follows directly from Theorem 1.
THEOREM6 The system with node sharing and starting-search-node transformations will not increase the number of priority inversion for any transaction.
Proof: The correctness of this theorem follows directly from the fact that the read-locks of
nodes for node sharing starting-search-node transformations will be released by the system, when conflicting lock requests occur.
5. Data Reservation
5.1. Overview
Although the previous sections propose general algorithms for batch insertion, query,
dele-tion, and rebalancing of B+-tree-indexed data, the worst-case number of priority inversions
for a real-time transaction can be significant. Such a large number of priority inversions is, in general, not acceptable to real-time transactions with highly critical timing constraints. Note that the maximum number of priority inversions reflects the worst-case blocking time and the response time for a transaction. The goal of this section is to further explore the
access control of B+-tree-indexed data to significantly reduce the maximum number of
priority inversions for highly critical real-time transactions.
Although highly critical real-time transactions may not be necessary hard real-time trans-actions, it is usually assumed that their arrival patterns and data requirements are known in a priori. We shall explore the idea of data reservation to strictly bound the maximum number of priority inversion for highly critical real-time transactions to guarantee their schedulability if necessary.
Let T = {τ1, . . . , τn} be a set of highly critical real-time transactions (or simply called highly critical transaction) in the system, and the set of keys which may be accessed by each of the transactions in T and their timing constraints be known in a priori. (Engineers may need the worst-case assumption on the key set of each transaction.) Regardless of whether a transactionτi in T is a periodic or sporadic transaction, the slack ofτi is defined as the relative deadline ofτi, i.e., the difference of the absolute deadline and the request time. We assume that the maximum slack of highly critical transactions in T is less than the slack of any other transactions in the system which are not in T . The transactions which are not belonging to T are comparatively less critical, called less critical real-time transactions (or simply called less critical transactions), and their arrival patterns, timing constraints, and data set are unknown before their arrivals.
The basic mechanism in controlling the number of priority inversions for highly critical
transactions is to use transaction slacks to manage the locks of B+-tree nodes. The ideas of
preemption level and the stack resource policy (SRP) (Baker, 1990) are adopted to define the minimum slack threshold for a transaction to lock a node (the minimum slack threshold is defined in terms of preemption level in the next section). As required by the basic
proto-cols defined in Section 4, transactions are scheduled using the EDF scheduling algorithm. However, before a transaction starts execution, the slack of the transaction must be higher than the minimum slack threshold, i.e., the preemption level defined in the next section, of any nodes locked by other transactions. Note that transactions are basically scheduled according to the EDF scheduling algorithm, and preemption levels are used to manage preemption to bound the number of priority inversions for highly critical transactions.
5.2. Terminology
Before proceeding with further discussion, we shall first define the important terminology based on definitions in Baker (1990).
Definition 6 (Preemption Level). The preemption levelπ(τ) of a transaction τ equals to a positive real number 1/di, where di is the relative deadline ofτ.
Since only overflowed nodes are locked in the algorithms, the node ceiling of a non-overflowed node is defined as follows. Note that, when a non-non-overflowed node is locked, every overflow node in the control set of the non-overflowed node, if it exists, is implicitly locked.
Definition 7 (Node Ceiling). The node ceiling π(nodei) of a (non-overflowed) B+-tree
node nodeiwith respect to a set T of highly critical transactions equals to the maximum of
the preemption levels of transactions in T whose key set overlaps with the key set of the control set of nodei.
If the key set of the control set of a non-overflowed node does not overlap with the key set of any transaction in T , then the node ceiling of the node is an arbitrary negative real number. Note that the node ceiling of a node changes dynamically as the structure of the B+-tree changes.
5.3. Batch Protocols with Transaction Preemption Levels
The scheduling of transactions (which execute batch-insertion, batch-deletion, batch-query, batch-update, and rebalance algorithms in Section 4) is according to the stack resource policy (SRP) (Baker, 1990), where EDF scheduling algorithm is adopted. The only difference between the assumptions of the original stack resource policy and the stack resource policy
adopted in this paper is that the set of B+-tree nodes, i.e., resources in Baker (1990), and
their ceilings may change dynamically. The SRP (Baker, 1990) is re-phrased as follows: Definition 8 (The Data-Reservation Scheduling Mechanism). The scheduler requires that
a transactionτ be blocked from starting execution until τ is the highest-priority ready
transaction in the system and the preemption level ofτ is higher than the maximum node
ceiling of the nodes locked by other transactions.
Obviously, once a transactionτ in T has started execution, all subsequent lock requests
on nodes byτ will be granted immediately, without blocking from lower-priority (or
not belonging to T arrives later thanτ because the assumption of this paper requires that the maximum slack of the highly critical transactions in T is less than the slack of any other transactions in the system which are not in T . However, a higher-priority transaction in T
may arrive later (thanτ does) and preempt the execution of τ because the scheduling
mech-anism does not allocate nodes to a transaction before the lock requests of the transaction.
5.4. Properties
THEOREM7 The system with the data reservation mechanism is deadlock-free.
Proof: There should be no deadlock involving both highly critical transactions and less critical transactions. It is because once a highly critical transaction starts execution, it will not be blocked by any less critical transaction, regardless of whether the less critical transaction has a priority higher or lower than the priority of the highly critical transaction. It is because the assumption of the scheduling mechanism with data reservation requires that the maximum slack (which is inversely proportional to the preemption level) of the highly critical transactions is less than the slack of any other less critical transactions in the system.
Theorems 1 and 5 show that there is no deadlock involving only less critical transactions when no data reservation is adopted. Since data reservation only restricts transactions from starting execution, it will not create any situation in which a transaction locks some node and waits to lock some other nodes. In other words, even if the data reservation mechanism is adopted, no deadlock exists among less critical transactions.
There does not exist any deadlock among highly critical transactions because, once a highly critical transaction starts execution, it will not be blocked by any lower-priority (or equal-priority) real-time transactions.
The schedulability of highly critical transactions can be enforced by bounding the max-imum number of priority inversion (as shown by the following theorem), where the slack of a highly critical transaction must not be less than the execution time of a less critical transaction.
THEOREM8 The maximum number of priority inversion for a highly critical transaction in T under the data reservation mechanism is one.
Proof: Let a less critical transactionτ0block the execution of some highly critical
trans-actionτ. In order for τ0 to blockτ, τ0 must lock some node Ni whose node ceiling is
not less than the preemption level ofτ. Obviously, after τ0has locked Ni, no less critical transactions can start execution (It is trivial to prove here that there is only one less critical
transaction which can blockτ). As a result, the maximum blocking time of a highly critical
real-time transactionτ is the execution time of the longest critical section of any transaction
whose slack is not less than the slack ofτ, as defined in Baker (1990), since, once a highly
critical real-time transaction starts execution, it will not be blocked by any lower-priority critical or any less critical transactions.
6. Performance Evaluation
6.1. Performance Model and Performance Metrics
The experiments described in this section are meant to assess the performance of the
pro-posed algorithms in inserting, deleting, and querying B+-tree-indexed data. The
simula-tion experiments compare the performance of the proposed algorithms, B-Link algorithms (Lehman and Yao, 1981), and batch update algorithms (Kerttu, Eljas, and Tatu, 1996) for databases using the EDF scheduling algorithm (Liu and Layland, 1973), where the B-Link algorithms had been shown to give the best performance among many B-tree algorithms, e.g., (Bayer and Schkolnick, 1977; Lehman and Yao, 1981; Mond and Raz, 1985), in reducing the number of deadline violations (Goyal et al., 1995). When non-retime al-gorithms were simulated, transactions were scheduled with the EDF priority assignment method (Liu and Layland, 1973). All weaker locks in the simulated algorithms, such as intention shared (IS) in the B-Link algorithms, were implemented as defined in the algo-rithms. The experiments also assess the performance improvement of the node-sharing, starting-node-transformation, and data reservation techniques.
The simulation model consists of five components: the transaction generator, the CPU, the disk, the B+-tree index, and the database. The transaction generator generates firm real-time transactions with an arrival rate following a Poisson distribution with a mean ranging from 2 arrivals per second to 11 arrivals per second. The transaction might be a query, an insert, or a delete transaction. When a transaction misses its deadline in a simulation, it will be killed.
The number of keys to be accessed by a transaction was randomly chosen between 1 and 10, and the keys were chosen following a normal distribution function with a variance equal
to 100 and a mean randomly selected in the range between 1 and 10,000,000. When a
value less than 1 was generated, it was set as 1. Similarly, when a value over 10,000,000
was generated, it was set as 10,000,000. 10 transaction traces per arrival distribution were
tested, and their results were averaged. The deadline, Di, of any generated transaction,τi, was derived as follow:
Di = ReadyTime + SF ∗ TranSize ∗ Height ∗ AccessTime
where ReadyTime, SF, TranSize, Height, and AccessTime were the arrival time ofτi, the
slack factor ofτi, the number of keys accessed byτi, the tree height, and the disk access
time, respectively. The slack factor ofτiwas randomly chosen between 2 and 8. The ratio
of query, insert, and delete transactions was 8 : 1 : 1.
The database was disk-resident with a physical block size equal to 1KB. Initially, the
database consisted of 10,000,000 data items with different keys in the B+-tree index
struc-ture. Let the key bit-size and the bit number of a physical block address both be 32 bits,
and the fanout of the B+-tree be 128. The access time of a disk block was estimated to be
13ms, where the access time consisted of seek time, latency delay, and transfer time. The parameters of the experiments and their baseline settings are summarized in Table 1.
The primary performance metric used is the miss ratio of transactions, referred to as Miss Ratio. The Miss Ratio of a collection of transactions is the percentage of transactions that
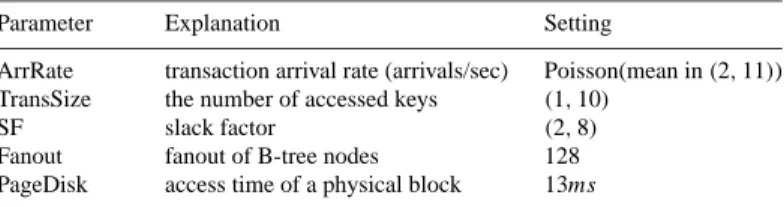
Table 1. Simulation parameters.
Parameter Explanation Setting
ArrRate transaction arrival rate (arrivals/sec) Poisson(mean in(2, 11)) TransSize the number of accessed keys (1, 10)
SF slack factor (2, 8)
Fanout fanout of B-tree nodes 128 PageDisk access time of a physical block 13ms
miss their deadlines. Another metric used is the averaged normalized response time of transactions, referred to as Normalized Response Time. The Normalized Response Time of a transaction is calculated as follows:
Normalized Response Time= CompletionTime− ReadyTime RelativeDeadline
where CompletionTime, ReadyTime, and RelativeDeadline are the completion time, request time, and relative deadline of the transaction, respectively. “Normalized Response Time” is good in measuring the response time of a transaction, which is an indicator regarding how well a real-time application responds to its user requests. The normalization process is to reflect the length of a transaction to make the experiment results more reasonable. (Otherwise, a system should always greedily run short transactions to maximize its per-formance). Each transaction was considered with the same weight/value in measuring the miss ratios. When the criticality or value of transactions had to be emphasized, the data reservation mechanism was adopted in the simulation, and their miss ratio and response time were reported (Please see Section 6.3)
6.2. Performance Improvement for Batch Protocols
In this set of experiments, we study the performance of the proposed algorithms in
in-serting, deleting, and querying B+-tree-indexed data. Figure 4.a shows the miss ratio of
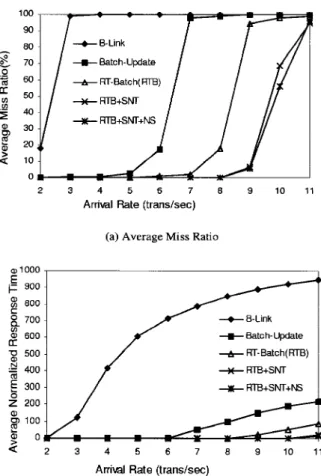
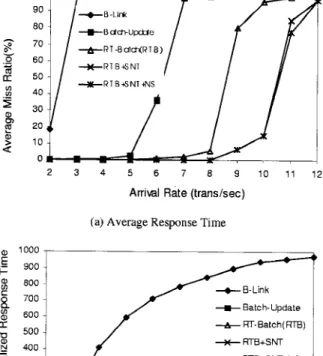
all transactions running the B-Link algorithms (B-Link) (Lehman and Yao, 1981), con-ventional batch update algorithms (Kerttu, Eljas, and Tatu, 1996) with the EDF priority assignment (Batch-Update), the proposed real-time batch algorithms (RT-Batch), RT-Batch with starting-node-transformation SNT), and RTB-SNT with node-sharing (RTB-SNT-NS). Obviously, batch algorithms greatly outperformed single-operation algorithms, i.e., the B-Link algorithms. RT-Batch largely reduced the miss ratio of transactions. The miss ratio of RT-Batch started increasing significantly when the arrival rate was higher than 8 arrivals per second, where Batch-Update could not successfully satisfied the deadline requirements when the arrival rate was higher than 6 (even 5) arrivals per second. The starting-node-transformation and node-sharing techniques further improved the miss ratio of transactions. Figure 4.b shows the normalized response time of transactions running B-Link, Batch-Update, RT-Batch, RTB-SNT, and RTB-SNT-NS. RT-Batch, RTB-SNT, and RTB-SNT-NS also greatly outperformed other algorithms.
Figure 4. The miss ratio and normalized response time of all transactions, where the ratio of query, insert, and delete transactions were 8 : 1 : 1.
Figures 5, 6, and 7 show the miss ratio and normalized response time of query, insert, and delete transactions running B-Link, Batch-Update, RT-Batch, RTB-SNT, and RTB-SNT-NS, respectively. RT-Batch, RTB-SNT, and RTB-SNT-NS all greatly outperformed other algorithms, and the starting-node-transformation and node-sharing techniques significantly improved the miss ratio of transactions. Note that although the starting-node-transformation and node-sharing techniques can also be used with conventional batch algorithms such as (Kerttu, Eljas, and Tatu, 1996) and have similar performance improvement, the proposed algorithms RT-Batch did have better performance because of the adopted real-time tech-niques.
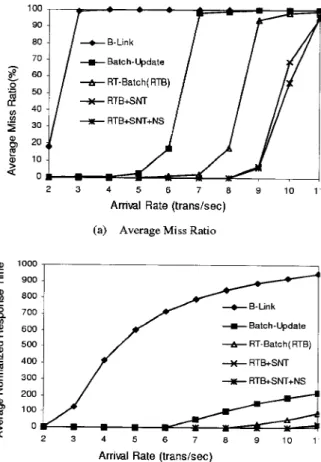
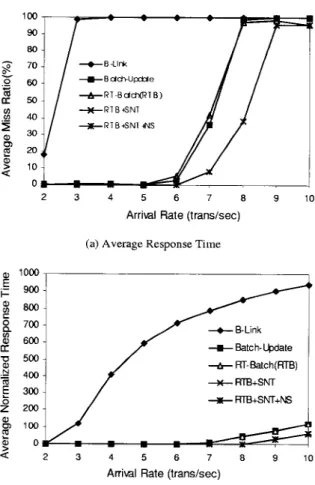
When the system consisted of merely query, insert, and delete transactions, Figures 8, 9, and 10 show the miss ratio and normalized response time of all transactions, respectively.
Figure 5. The miss ratio and normalized response time of query transactions, where the ratio of query, insert, and delete transactions were 8 : 1 : 1.
RT-Batch, RTB-SNT, and RTB-SNT-NS greatly outperformed other algorithms when the system consisted of query transactions. However, when the system consisted of only insert or delete transactions, RT-Batch, RTB-SNT, RTB-SNT-NS, and Batch-Update had similar performance because the benefits of adopting the real-time techniques were offset by the longer locking time of intensive exclusive-lock requests by RT-Batch, SNT, and
RTB-SNT-NS. Note that it was pointed out that the relaxed B+-tree structure adopted in this
paper was not good for a system consisting of only insert or delete transactions (Kerttu, Eljas, and Tatu, 1996).
Figure 11 shows that the performance of RT-Batch, RTB-SNT, and RTB-SNT-NS re-mained similar when the relative deadline of a rebalance transaction was set as one, two, or four times of the relative deadline of its corresponding insert or delete transaction. It was
Figure 6. The miss ratio and normalized response time of insert transactions, where the ratio of query, insert, and delete transactions were 8 : 1 : 1.
mainly because rebalance transactions only locked one single node (and its child nodes) and did not generate much blocking time to other urgent transactions.
6.3. Data Reservation
The experiments described in this section are meant to assess the capability of the data
reservation technique in reducing the miss ratio of highly critical transactions1. Let 1%
of total transactions be highly critical transactions; a half of them was insert and delete transactions, and the other half was query transactions. The number of keys accessed by a critical transaction was randomly chosen between 1 and 10, and the keys were chosen by a normal distribution function with a variance equals to 100 and a mean in the range
Figure 7. The miss ratio and normalized response time of delete transactions, where the ratio of query, insert, and delete transactions were 8 : 1 : 1.
between 500 and 3,500. The small mean range was to create more conflicts among the
(highly critical) transactions.
Figure 12 shows that the miss ratio and normalized response time of highly critical transactions were greatly improved when the priority inheritance mechanism (RTB-PI), data reservation technique (DR), or both (PI-DR) were adopted. DR and RTB-PI-DR had the best performance in the simulation experiments. The priority inheritance mechanism did not improve the system performance when the data reservation technique was already adopted. It was because the data reservation technique already embedded the idea of priority inheritance into its design. Note that when a higher-priority transaction started execution, it will not be blocked by any lower-priority transaction. On the other hand, if a higher-priority transaction was blocked from starting execution, no intermediate-priority transaction can preempt the execution of a lower-priority transaction which currently blocks
Figure 8. The miss ratio and normalized response time of transactions in a system consisting of merely query transactions.
the higher-priority transaction. In other word, the executing lower-priority transaction already “implicitly” inherited the priority of the higher-priority transaction under the data reservation technique.
Figure 13 shows the miss ratio and normalized response time of all transactions. The system performance was slightly improved when the priority inheritance mechanism (RTB-PI), data reservation technique (RTB-DR), or both (RTB-PI-DR) were adopted. It was because the ratio of critical transactions in the system was very small.
Figure 9. The miss ratio and normalized response time of all transactions in a system consisting of merely insert transactions.
7. Conclusion
Index-based concurrency control is of paramount importance to the performance of many large-scaled real-time databases. Most of the past research studies in data-item-oriented real-time concurrency control cannot be directly applied to a database with index structures.
This paper proposes methodologies to control the access of disk-resident B+-tree-indexed
data in a batch and firm real-time fashion. We propose batch algorithms to insert, query,
delete, and rebalance B+-tree-indexed data and to demonstrate the performance of the
algorithms by a series of simulation experiments. A relaxed and less blocking B+-tree
index structure is explored for firm real-time and batch processing of transactions with multiple requests. We propose methodologies to share nodes among batch transactions to
Figure 10. The miss ratio and normalized response time of all transactions in a system consisting of merely delete transactions.
further reduce the number of disk I/O without introducing more priority inversion. When
the schedulability of transactions with highly critical timing constraints is considered, we propose a data reservation mechanism based on the idea of preemption level (Baker, 1990). The performance of our methodologies has been evaluated by a series of experiments, for which we have obtained some encouraging results.
The algorithms presented in this paper address applications in which index-based inser-tions, deleinser-tions, and range queries, form a significant portion of the workload. However, there do exist RTDBS applications, where the set of data items is fairly static and little need on range queries exists. For these applications, hash-based techniques may be more appropriate. We intend to investigate this issue in the future research.
Figure 11. The miss ratio and normalized response time of all transactions, where the ratio of query, insert, and delete transactions were 8 : 1 : 1. (RD= i means that the relative deadline of a rebalance transaction was set as i times of the relative deadline of its corresponding insert or delete transaction.)
Appendix A
Procedure Rebalance(parent node, child node, deadline)
Input: parent node, child node: nodes which need rebalancing. /* parent node is the parent node of child node */
Begin
W-Lock(parent node); W-Lock(child node); Read Node(parent node); Read Node(child node);
Figure 12. The miss ratio and normalized response time of highly critical transactions, where the ratio of query, insert, and delete transactions were 8 : 1 : 1.
If parent node is no longer the parent node of child node
Then /* The B+-tree Index structure is changed. */
Unlock(parent node); Unlock(child node); Return;
EndIf;
For each nodeiin the control set of child node from left to right Do
If nodeiis empty Then
If nodei has a right sibling node in the control set Then