A Design Framework for Embedded Linux Drivers
6
0
0
全文
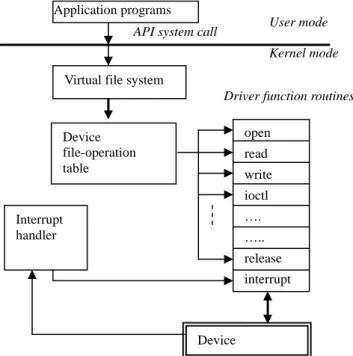
(2) current work aims at supporting embedded Linux (uClinux) [19] running at ARM-7 platform only. The portability issue will not be studied in this paper. This paper proposes a new design framework to facilitate the development of Linux device drivers. The framework provides a structural design approach and automatic tools for design. It consists of a two stage design process. The first stage is to automatically generate a driver code skeleton according to user-specified configuration. The driver skeleton is composed of a set of parameterized templates which contain coarse-grained functions. The second stage is based on our proposed Embedded Driver-Specific Language (EDSL) which offers specific expressive power over the driver domain and allows one to complete the driver code from the skeleton. Specifically, the EDSL is a kind of DSL, but it is embedded in the C language. The programming scheme retains the expressive power of C language for users as well as offers expressive power over the domain of device drivers. The driver code written in EDSL not only is more concise and easier verified, but also can be automatically synthesized to C codes. A preliminary implementation of the design framework has been applied to design device drivers for an ARM7-based platform and obtained favorable results. The reset of the paper is organized in the following way. The next section overviews our design framework and introduces the input specification to our framework. Then the two primary components, skeleton-generator and EDSL approach, will be described in detail in Section 3 and Section 4 respectively. Preliminary assessment for our approach will be shown in Section 5. Final section concludes the paper and presents some line of future work.. 2. SYSTEM OVERVIEW Fig. 1 shows our design framework for embedded Linux device driver. The framework consists of a two stage design process. The first-stage process accepts API (Application Program Interface) and resource configuration files as input specifications. API is an abstraction of functions provided by the peripheral device, through that operation system (on behalf of application programs) can communicate with devices. Fig. 2 shows the operation scheme. The key idea behind the first-stage process is based on that Linux OS has defined a set of standard API function prototypes (such as read, open and ioctl) for various kinds of device [12], that is, character, block and network device. A practical driver is comprised of a subset of the API set. We prepare a code template for each API function of the character-type device (currently block and network devices having not been considered), which consists of optional codes and substitutable string variables. The API configuration file determines what subset of APIs and what specific features to be provided by a driver. An API function performed generally involves certain hardware resources, like IO registers, interrupt and DMA. Their features are defined in the resource configuration file. API and resource configurations are parsed by the skeleton generator and relevant parameters derived are passed to a C-preprocessor to instantiate code templates. These templates are written in C language with preprocessing directives. Though there are more powerful preprocessing languages such as perl and Ksh, Application programs User mode. API system call. Kernel mode Virtual file system. API Configuration. Driver function routines. Resource Configuration Code Templates. CPP. Code-Skeleton Generator. open. Device file-operation table. read write ioctl. Manual coding EDSL Descriptions. ….. Interrupt handler. ….. release interrupt. Code Synthesizer C-program device driver. . Fig.1: The design framework for embedded Linux driver.. Device. Fig. 2: The API system call and the Linux device driver..
(3) NonBlock UseBuf BufSize BufFull Access. ; indicates whether nonblocking mode is used.. ; indicates whether a buffer is used to hold input data. ; the size of read buffer ; indicates the approach used when the buffer is full (types: CirCular/Signal/Discard) ; indicates the operation type to read data (e.g. directly read, read via DMA). Fig. 3: A list of parameters used to specify the read() function. provides. For example, a read() function can be C-preprocessor, which can perform string subeither blocking or non-blocking and use buffer stitution and conditional statements, is enough or not. Fig. 3 lists a set of parameters associated for our need. All the generated codes templates with the read() function and Fig. 4 shows a simare assembled to build a skeletal device driver. ple example file. It specifies that the read( ) In addition, a header file and a Makefile are also function does not support nonblocking mode and generated in the process. uses a circular buffer with the size of 2048 bytes In the second stage, one can start from the to hold data, which is moved to memory via a code skeleton and continue to complete the DMA operation. This configuration file also dedriver with C language and our proposed EDSL. fines two ioctl commands. An ioctl command is The EDSL is a small language and is expressive defined by three parameters, namely Cmd uniquely over the specific features of device (Command name) name, Dir (access direction) drivers. The programming scheme attempts to and Argu (the type of argument). retain the expressive power of C language for users as well as offers expressive power over the driver features. Presently, the EDSL provides ReadApi NonBlock=No, UseBuf = Yes, three kinds of descriptive capability: accessing ReadApi BufSize = 2048, Access = DMA registers, software-driven signaling and deIoctlApi Cmd=UART_BAUDRATE, Dir=WR, Argu=int scribing state machines. They will be further IoctlApi Cmd=UART_STATUS, Dir=RD, Argu=char detailed in a later section. After added with C statements and EDSL statements, the driver code is then fed into the code synthesizer. It transFig 4. A sample of API configuration file. forms the EDSL statements to C codes and tries to optimize the code size and/or performance. The resource configuration of a device involves The final output is a device driver in C language. device registers, interrupt, DMA and IO memory. The device registers can be viewed as a pro3. SKELETON GENERATOR gramming interface for device function. Generally, a device register is partitioned into several The skeleton generator accepts API and rebit fields each of which represents a certain atsource configurations as input specifications and tribute (i.e. status or configuration) of the device. outputs a skeletal driver that is built from a set of In our framework, each bit field is called as a predefined code templates. This section firstly device attribute and each attribute can be acintroduces the syntax and semantics of the concessed individually in EDSL statements. The figuration files and then describes the operation configuration file defines the physical address of of the skeleton generator. device register and the bit-range for each device attribute. Fig. 5 shows an example of resource The API configuration file determines not configuration file for a UART device. The synonly what kinds of API the driver supports but tax of the file is the same as API configuration. also what functional facilities every API proIn the example, the name of device is specified vides. Roughly, the syntax of the API configuraas “UART” and the physical base address tion can be stated as follows: 0x3ff0000. The device has a register which re<file> :== { <param- line> } EOF sides at the offset 0xD0000 and named as “UART_ULCON0”. The register contains five < param-line > :== <ApiName> { ',' <padevice attributes (IR, SC, PMD, STB and WL) ram-item> } '\n' whose bit positions are at bit 7, bit 6, bit 5~3, bit <param- item> :== <NAME '=' VALUE > 2 and bit 1~0 respectively. Other bits are not used and denoted as “U”. Besides of register Each of Linux API functions has a unique declarations, the features of interrupt and DMA ApiName, for instance, ReadApi for read() funcused by the device are also specified in the file, tion. Associated with each ApiName, there are which shows that the interrupt number used by certain parameters to differentiate various operathe UART device is 7 and its type is “slow” tion modes and services that the API function (means its served priority is low). Furthermore,.
(4) its corresponding service routine uses bottom-half mechanism [12].. Device Name=UART, IOBASE=0x03ff0000 INT IntNum = 7, Type=Slow, UseBH=Yes DMA DmaChan=0 REG Name=ULCON0, Addr=0xD0000, \ 24:1:1:3:1:2=U:IR:SC:PMD:STB:WL REG Name=BRDDIV0, Addr=0xD014, \ 16:12:4=U:CNT0:CNT1. Fig 5. A sample of resource configuration file. The first task of the skeleton generator is to parse the API and resource configurations and to pass the derived parameter values to the template instantiater (i.e. C preprocessor). The grammar of these two configuration files is rather simple (i.e. regular language). We have implemented its parser in C language. The parameter-value pairs parsed are given to the template instantiater. Each of standard API functions and device initialization procedure has a corresponding code template. These templates are written in C language with preprocessing directives. Specifically, it consists of optional codes and substitutable string variables. Fig. 6 is a template example of device initialization procedure. The template uses parameter “DEVNAME” to do several string substitutions and parameter “INT” to determine whether the codes about interrupt are included. According to the resource configuration in Fig. 5, the parser will issue the command, “gcc –E –DDEVNAME=uart –DINT –c template.c”, to generate the needed code template. The second task of the skeleton generator is to collect all generated code templates into a file and to produce relevant header file and Makefile for the driver. The header file contains all the symbol definitions and function prototypes. For examples, INTNUM is defined as “7” and ULCON0 is defined as “IOBASE+0xD0000” in the header file.. 4. EMBEDDED DRIVER-SPECIFIC LANGUAGE Starting from driver skeleton, users can complete the driver in C language and EDSL. The EDSL is a kind of DSL, but it is embedded in the C language. The programming scheme retains the expressive power of C language for users as well as offers expressive power over the domain of device drivers. The descriptive capability of the EDSL provided is associated with the functional partition of a device, as shown in Fig. 7. It shows that a driver can be separated into three parts: bus interface, device attributes and device core. A bus is made up of both an electrical interface. and a programming interface. EDSL currently provides capability to emulate electrical interface in software. The attributes (stored in registers) abstract the status and the configuration setting of the device. EDSL allows a user to manipulate them individually. The device core is responsible for performing device functions. EDSL currently provides state-machine description to help a driver to maintain the device resource. The followings give examples to illustrate their descriptions. #define DEV_INIT(s) DEV_INITX(s) #define INTISR(s) INTISRX(s) #define FOPS(s) FOPSX(s) #define STR(s) STRX(s) #define DEV_INITX(s) int s## _init( void) #define INTISRX(s) s## _interrupt #define FOPSX(s) &## s## _fpos #define STRX(s) #s int major = 0; DEV_INIT(DEVNAME) { int result; #ifdef INT if(request_irq(INTNUM, INTISR(DEVNAME), 0, STR(DEVNAME), NULL)) { printk(STR(DEVNAME) " IRQ %d is not free.\n", INTNUM); return -EIO; } #endif /* Register a character device */ if ((result = register_chrdev(major, STR(DEVNAME), FOPS(DEVNAME))) < 0) { printk(KERN_WARNING STR(DEVNAME) "can't get major %d\n",major); return result;. } } Fig 6. A code-template of device_init( ) Peripheral bus. Bus interface. edsl_signal edsl_delay. Device attributes. edsl_register. Device Core. edsl_state. Fig. 7: A functional partition of a device and the associated EDSL facilities for each part..
(5) Accessing registers: The registers of a device can be viewed as a programming interface of the device function. Through accessing registers, a driver can configure the device, read device status and do data transaction. As stated in a previous section, a register may contain more than one device attribute and each one can be manipulated individually. The manipulation of device attribute requires bit mask and shift operations which are error-prone in a general programming language such as C. A driver code generally consists of many such bit operations, which can represent up to 30% of driver code [9]. The EDSL allows users to specify the access of device attribute individually, and the bit operation and type consistency checking will be performed implicitly in our framework. The followings show a code segment of EDSL to access device attributes (referring to Fig. 4 and Fig. 5 configurations): edsl_register(ULCON0_WL=0x2, ULCON0_STB=StbLength, ULCON0_OTH=UNCHAN); edsl_register(baudrate = BRDDIV0_CONT0); The above statements can be transformed to the followings: temp = *(ULCON0); temp = temp & 0xFFFFFFF8; /* Other bits are unchanged */ temp = temp | 0x2; temp = temp | (stbLength << 2) ; *(ULCON0) = temp; baudrate = (*(BRDDIV0) & 0x0000FFF0 ) >> 4; The above transformation is performed by the code-synthesizer in the framework. Some kinds of optimization can be further explored in the transformation, such as the combining consecutive accesses of the same register into single access and explicitly register caching. They have not been included in our current framework. Software-driven signaling: Embedded computing systems seldom adopt standard IO buses, such as PCI or ISA for PC systems, to communicate with hardware devices. The communication interfacing can be maintained by aided hardware or software. We call the emulation of bus interface in software to be software-driven signaling. It is applicable for low speed and low cost applications. The following EDSL statement requests a CPU to generate an active high signal having the duration of at least 200ms through the IO port ADC_RESET. edsl_signal( ADC_RESET, Active = HIGH, DUR = 200ms );. To realize the above action, the driver needs the invocation of timer and prepares associated handler. Our framework will automatically generate these codes. Furthermore, the insertion of delay between consecutive register accesses sometimes is required for low speed IO devices. This can be achieved by busy-waiting or invoking a timer. The edsl_delay() directive is proposed to specify the behavior. Describing state machines: State machines are usually used to model protocol-based network layered devices and to manage shared resources [10]. EDSL provides a directive to describe a state table, as shown below: edsl_state(S0, x >= 3 && y == 4, S1, do_play); edsl_state(S1, x<= 2 || y != 4, S0, do_exit); The four fields of the edsl_state statement represent current state, conditions, next state and action performed before changing to next state, respectively. Currently, we transform the state table to C codes using procedure scheme in [5]. In recent years, optimal code synthesis for control-dominated machine attracts much attention in EDA research community [1, 4, 6]. Partial results of them can be directly applied to our framework. However, for certain kinds of devices, a driver needs to distribute state management among different API functions, which needs additional techniques to optimize the codes. The optimization techniques have not been included in our framework.. 5. ASSESSMENT To assess the proposed design framework, a preliminary implementation has been applied to develop device drivers for an ARM7-based platform from Wiscore corporation [18]. The platform contains an SOC (Samsung 3C4510B) that includes an ARM7 as CPU and most of peripheral devices, such as timer, DMAC and UART. We connect a LCD to the platform for experiment. Two drivers under uClinux OS for UART and LCD respectively have been designed for the assessment. The UART device is programmed to issue a DMA request each time when it receives one byte data. Its driver should collect data in a buffer and provide blocking read. The driver for LCD involves many ioctl calls to set character attributes and needs delay-insertion statements because the response of LCD is rather slow. Both drivers heavily rely on register access. In addition, our code template for read( ) function contains the codes for DMA transfer. Therefore, about 80% of both driver codes can be covered by the generated driver skeleton and EDSL statements..
(6) 6. CONCLUSION AND FUTURE WORK We have presented a new design framework to facilitate the development of embedded Linux device drivers. The framework provides a two stage design process and automatic tools for design. The first stage is to automatically generate a driver skeleton based on a set of parameterizable templates. The second stage is to allow users to complete the driver with the new proposed EDSL. The driver code written in EDSL has been shown more concise and easier verified. Furthermore, the EDSL codes can be automatically synthesized to C language. A preliminary implementation of the design framework has been applied to design device drivers for an ARM7-based embedded platform and obtained favorable results. The future works include the exploration of optimal code synthesis for EDSL and the implementation of an integrated GUI development environment based on our design framework.. [8]. T. Katayama, K. Saisho and A. Fukuda, “Prototype of the Device Driver Generation System for UNIX-like Operating Systems,” Proceedings of International Symposium on Principles of Software Evolution, pp. 302 –310, 2000.. [9]. F. Merillon, L. Réveillère, C. Consel, R. Marlet, and G. Muller, “A DSL Approach to Improvee Productivity and Safety in Device Drivers Development,” Proceedings of the 15th International Conference on Automated Software Engineering, 2000.. [10]. Thomas Nelson, “The Device Driver as State Machine,” C/C++ Users Journal, March, 1992.. [11]. M. O’Nils and A. Jantsch , “Operating system sensitive device driver synthesis from implementation independent protocol specification,” Proceedings of Design, Automation and Test in Europe Conference and Exhibition, pp. 563-567, 1999.. [12]. A. Rubini and J. Corbet, Linux Device Driver, 2nd Edition O’Reilly, 2001.. [13]. S. A. Thibaut, R. Marlet and C. Consel, “Domain-Specific Language: From Design to Implementation Application to Video Device Drivers Generation,” IEEE Tran. On Software Engineering, pp. 363-377, May/June 1999.. [14]. E. Tuggle, “Writing Device Drivers,” Embedded Systems Programming, pp. 42-65, Jan 1993.. [15]. Jungo Ltd, WinDriver V5 Users Guide, URL: http://www.jungo.com. [16]. Bsquare, WinDk Users Manual, URL: http://www.bsquare.com.. [17]. .UDI Core http://www.project-udi.org.. 7. ACKNOWLEDGMENTS This work was supported by the National Science Council, Taiwan, R.O.C. under grant NSC 91-2213-E-030-017.. 8. REFERENCES [1]. Felice Balarin et. al., “Synthesis of Software Programs for Embedded Control Applications,” IEEE Trans. on CAD, vol. 18, no. 6, pp. 834-849, June, 1999.. [2]. P. Chou, R. B. Ortega and G. Borriello, “Interface Co-synthesis Techniques for Embedded Systems,” Proceedings of IEEE/ACM International Conference on Computer-Aided Design, pp. 280-287, 1995.. [3]. A. Deursen et al., “Domain-Specific Languages: An Annotated Bibliography,” ACM SIGSOFT Software Engineering Notes, Nov. 2001.. [4]. S. Edwards, “Compling Esteral into Sequential Code,” In Proc. of DAC, 2000.. [5]. Paul Fischer, “State Machines In C,” C/C++ Users Journal, Dec, 1990. [6]. Y. Jiang and R. K. Brayton, “Software Synthesis from Synchronous Specifications Using Logic Simulation Techniques,” In Proc. of DAC, pp. 319-324, 2002.. [7]. R. Lehrhaum, “The State of Embedded Linux,” presented in Embedded Linux Expo & Conference, June 2001.. [18]. http://www.wiscore.com.tw. [19]. http://www.uclinux.org.. Specification,.
(7)
數據


相關文件
• Among the learning objectives for ELEKLA, the language development strategies, literary competence development strategies and attitudes specific to language and literature
(“Learning Framework”) in primary and secondary schools, which is developed from the perspective of second language learners, to help NCS students overcome the
The Hong Kong school curriculum, made up of eight key learning areas (under which specific subjects are categorised), provides a coherent learning framework to enhance
The Hong Kong school curriculum, made up of eight key learning areas (under which specific subjects are categorised), provides a coherent learning framework to enhance
In this paper, we have studied a neural network approach for solving general nonlinear convex programs with second-order cone constraints.. The proposed neural network is based on
which can be used (i) to test specific assumptions about the distribution of speed and accuracy in a population of test takers and (ii) to iteratively build a structural
Using a one-factor higher-order item response theory (HO-IRT) model formulation, it is pos- ited that an examinee’s performance in each domain is accounted for by a
We investigate some properties related to the generalized Newton method for the Fischer-Burmeister (FB) function over second-order cones, which allows us to reformulate the
