2006 IEEEInternational Conferenceon Systems, Man, andCybernetics
October8-11, 2006, Taipei, Taiwan
Self-Organizing Neural-Network-Based Adaptive Control
for
Linear
Ultrasonic
Motor
Chun-Fei
Hsu,Member,
IEEE,and
Tsu-Tian Lee,Fellow,
IEEEAbstract-In this paper, an self-organizing
neural-network-based adaptive control (SONNAC) system is
developed. The SONNAC system is comprised of a neural controller and acompensation controller. The neural controller
utilizes aself-organizing neural network (SONN) to mimic an ideal controller, and the compensation controller is designed to compensate for the approximation error between the neural
controller and the ideal controller. When the approximation performance ofthe SONN isnot good enough, the SONN can create new neurons in the hidden layer to decrease the
approximationerror.Moreover,theadaptive laws of controller
parameters arederived in the sense of Lyapunov, so that the
stability ofthesystem can beguaranteed. Finally,toinvestigate
theeffectiveness oftheproposed SONNAC system, the design
methodologyisappliedtocontrol a linearultrasonic motor.
I. INTRODUCTION
T HEcomputed torque orinverse dynamics technique is a l specialapplication of feedback nonlinearsystems. These
design methods are based on a good understanding of the controlled system dynamics and its environment; however, it isunpracticaltopreciselymodelacomplex nonlinear system. To tackle this problem, the neural-network-based control techniques havepresented the alternative design approaches
for the uncertain nonlinear systems [1-5]. Thesuccessful key element istheapproximationtheory, where theparameterized
neural network can approximate the unknown system
dynamics ortheideal controllerafterlearning. Someof these learning algorithms are based on the backpropagation
algorithm. However, these approaches are difficult to guarantee thestability and robustness of closed-loop system. To overcomethis difficulty, someof the learningalgorithms arebasedontheLyapunovstabilitytheorem. Thetuning laws of the neural network have been designed to guarantee the systemstabilityintheLyapunovsense.
Although the control performances are acceptable in [1-5], the learning algorithm only includes the parameter
learning, andthey havenotconsidered thestructure learning
of the neural network.If thenumber ofneuronsin thehidden layer is chosentoolarge,thecomputation loadingisheavyso
that they are not suitable for practical applications. If the
Manuscript received December25,2005.This workwassupportedinpart
bythe National ScienceCouncil of theRepublicofChina underGrantNSC 93-2213-E-155-038.
Chun-Fei Hsu is with the Department of Electrical and Control Engineering, National Chiao-Tung University, Hsinchu 300, Taiwan,
RepublicofChina(e-mail:[email protected]).
Tsu-TianLeeiswith theDepartment of ElectricalEngineering,National Taipei UniversityofTechnology, Taipei 106,Taiwan, Republic of China (e-mail:[email protected]).
numberofneurons in the hidden layer is chosen too small, the learning performance may be not good enough to achieve desired control performance. To tackle this problem, several self-constructing neural networks,consisting of structure and parameterlearning phases, have been proposed [6-8]. These two-phase learning algorithms not only decide the structure ofneural network but also adjust the parameters of neural network. Recently, some self-constructing neural networks have been applied to solve several control problems. However, some of them can not guarantee the system stability; and some of them require too complex design proceduretoachievesatisfactoryperformance.
Modern mechanical systems, such as machine tools and automatic inspection machines, often require high-speed high-accuracy linear motions. These linear motions are usually realized using the rotary motors with a mechanical transmission, such as reduction gears and lead screw. These transmission mechanisms not only significantly reduce the linearmotion speed and dynamic response, but also introduce the backlash and large friction. To tackle this problem, a linear ultrasonic motor (LUSM) is introduced to apply the linear motion without using any mechanical transmission. The LUSM has much merit, such as high precision, fast control dynamics, large driving force, smaller dimension, highholdingforce, silence andmore minimumstep size than the class electromagnetic motors, so that it can be used in many different applications [9]. However, the driving principle of the LUSM is based on the ultrasonic vibration force of piezoelectric ceramic elements and mechanical frictional force. Therefore, its mathematical model is
complex, andthemotorparametersaretime-varying because of increasing temperature and changes in motor drive operating conditions. For control system designs, the conventional controltechnologiesarealways basedonagood
understanding of the controlled system; however,theLUSM
dynamic model is difficult to obtain. Therefore, it is very difficulttocontrol theLUSMusing the conventional control theory. Totackle thisproblem,somedesign techniques have beenadopted for the LUSMcontrol [10-12]; however, these
design procedures are overly complex or may cause large
chatteringinthe controlefforts which will wear the bearing mechanismand exciteunmodelleddynamics.
The motivation ofthispaperis todesigna self-organizing neural-network-based adaptive control (SONNAC) system for the LUSM. The SONNACsystemiscomprisedofaneural controller and a compensation controller. The neural controller uses a self-organizing neural network(SONN) to
isdesignedto recoverthe residual of theapproximationerror.
Thelearning phase of SONNAC includesa structurelearning
andaparameterlearning. Inthestructure learning phase,the developed SONN can on-line create new neurons in the hidden layer asthe approximation performance isnot good
enough, thus the learning capability and flexibility can be upgraded. In the parameter learning phase, the controller parameters can be on-line tuned based on the Lyapunov
function, sothatthestability oftheclosed-loop systemcanbe guaranteed. Finally, theexperiment results areperformedto
demonstrate the effectiveness of the proposed SONNAC design method for LUSM.
II. MODELINGOF LINEARULTRASONIC MOTOR The structure of the LUSM is a large face ofa relatively
thin rectangular piezoelectric ceramic device. The driving
principles of the LUSMarebasedonthe ultrasonic vibration force of piezoelectric ceramic element and mechanical frictional force. Figure 1 shows theprincipalstructureofthe LUSM considered in this study [9]. The stator vibrator is fitted withbending and longitudinalpiezoelectric actuators.
They are driven by two electrical sources of identical frequency, but with a phase difference that is carefully
controlled. Atthe vibration tip, an elliptical motion is thus created, resultant of the elliptical and longitudinal motion. The bending actuators convert a large electrical power to
mechanicaloutput andthelongitudinal actuatordynamically
changes the force along thepre-load directionto adjust the frictional force betweenthe stator and therotor. Friction is inevitableintheLUSM. Itisahighly complicatedprocessto
attempt to build an explicit mathematical friction model for the LUSM because friction plays a dual role: it does not
simply contributetothenonlineardynamics (e.g.,deadzone)
ofthe LUSM, but it also serves as thedriving force for the movingpart. Therefore, theLUSMdynamic equationisvery complicated and theparameters ofthe elements arenoteasy
toknow.
For developing the control law, the LUSM can be describedas a second-order nonlinear dynamic equation by the Newton's Lawas
[M+m]x=F(x)+G(x)u (
where M is themass ofthemoving table; m is themassof the payload; x=[x
x]4
represents the position and velocity of themoving table; F(x) is the nonlineardynamic function including friction, ripple force and external disturbance; G(x) is thegainofthe LUSMresonantinverter;and u is the inputforcetothe LUSM.Rewriting(1),thedynamic equation of the LUSMcanbe obtained asF(x) + G(x) u
M+m M+m
=
f
(x)
+g(x)u
(2)
F(x) G__x_
where f(x) and
g(x)(x)
x) Since theseM+m M+m
LUSM poses an interesting and challenging dilemma to the control problem. longitudinal piezoelectric actuator 'vibration tip - bending piezoelectric actuator
Fig. 1 Structureofthepiezoelectric-type linear ultrasonic motor.
III. IDEALCONTROL
The tracking control problem ofthe LUSM system is to find a control law so that the state trajectory x can track a reference command xc.Thetrackingerroris definedas
e=x -x (3)
andasliding surface is definedas
s-e +ke+k2 |e(r)dr (4)
where
k,
and k2 are non-zero positive constants. If the system dynamics areexactly known, anideal controller can bedesignedaseq hU
wheretheequivalent controller ueq isrepresentedas
1
Ueq g(=x
(-f
(x)+?K +kIe+k,e)andthehitting controller uhi isdesignedas Uh
=-I
sgn(s)g(x)
(5)
(6)
(7)
where q is a positive constant and
sgn(.)
is the sign function. Substituting(5), (6) and (7) into (2),yieldss=-isgn(s). (8)
Inordertodrive the s -X 0, consider theLyapunovfunction candidate in thefollowing form
I1.
V,
(s)= --S(9)2
Differentiating (9) withrespect totimeandusing(8),yields
V,(s)=ss
=-7IsI
<O. (10)In summary, the ideal control system presented in (5) can guarantee the system stabilityin the sense oftheLyapunov. However, if the system dynamics
f(x)
and g(x) are unknown or perturbed, the ideal control cannot be implemented. Thus, a model-free control technology, which is termed as self-organizing neural-network-based adaptive control (SONNAC), is proposed in the following section to achieve desiredtrackingperformance.IV. SELF-ORGANIZINGNEURAL-NETWORK-BASED ADAPTIVE CONTROL
The proposed SONNAC system is comprised of a neural controller and a compensation controller. The neural controller uses a SONN, in which the neurons inthehidden layer can on-line split up as theapproximation performance is not good enough, to mimic an ideal controller. The compensation controller is designed to compensate for the approximation error between the neural controller and the ideal controller.
A. DescriptionofSelf-OrganizingNeuralNetwork
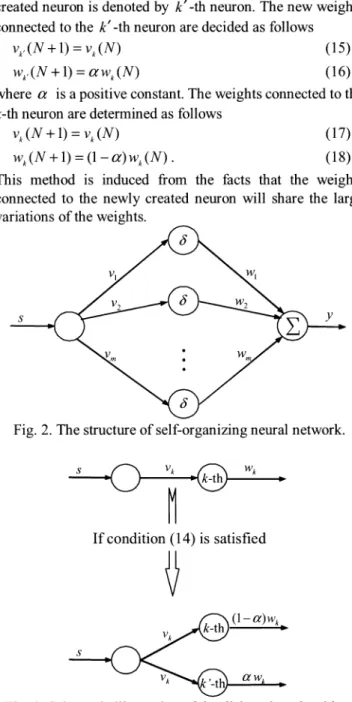
A single-hidden-layer SONN is shown in Fig. 2. The outputof this SONN takes the form
yn
y= wI-a(viS)
i=l
(11)
variation of the weights. As shown in Fig. 3, the k-th neuron satisfying (14) is divided into two neurons, and the newly created neuron is denoted by k'-thneuron. The new weights connected to the k'-thneuron aredecided as follows
Vk,(N+1)= Vk(N) (15)
wk(N+1)=aWk(N) (16)
where a is a positiveconstant. The weights connected to the k-th neuron aredetermined as follows
Vk(N+1)=Vk(N) (17)
Wk
(N
+1)
=(1-ca)
wk(N).
(18)
This method is induced from the facts that the weights connected to the newly created neuron will share the large variations of theweights.
where s and y are the input and output of the SONN, respectively, a represents the hidden-layer activation function, v; is the interconnection weight between the input and hidden layers, and Wj is the interconnection weight between the hidden and outputlayers. Theseweights will be on-line adjusted in the following derivation. The activation function in this paper isconsideredas asigmoid function
a
(I)
+e)(12)
Bycollecting all theweights of the SONN, equation (1 1) can beexpressedina vectorformas
y=
WT((Vs)
(13)
where V=
[vl,
v2 ,...,v,E R and W=[wl,
w2,...,w]E
R' A main property of neural network regarding feedback control purpose is the universal function approximation property. Ingeneral, the approximation error decreases as the net size m increases. In general, the number of neurons in hidden layer should be determined by trial-and-error to achieve favorableapproximation.To tackle this problem, this paper proposed a simple
disjunctionalgorithm such that the k-thneuronin the hidden layer splits up at the N-th sampling time, if the following condition is satisfied
nk
I|
+IWI
01
k=1,2,...,mi=l
(14)
where 0 denotes a disjunction threshold value. When the approximated nonlinear functions are too complex, the disjunction threshold value should be chosenas asmall value sothattheneurons canbeeasilycreated. Thetuning laws v; and i4 willbe derivedin thenextsubsection. The proposed
disjunction algorithmis derivedfrom the observation that if the left hand side of (14) is larger than the disjunction
threshold value, which implies theprecise approximation is hard to capturebecause theupdating of theweightvalues is relativelylarge. Forthatreason, ifcondition(14)is satisfied,
then a new neuron is created to spread the relatively large
s
Fig.2.Thestructure ofself-organizing neural network.
s Vk kh Wk
Ifcondition (14) issatisfied
t O(1 a)wk.
Vk kt
S
Fig. 3. Schematic illustration of thedisjunctionalgorithm. B. DesignofSONNAC
The developed SONNAC system is shown in Fig. 4; the controller is comprised of a neural controller and a
compensation controller
U=Un, + Uc,p. (19)
Theneural controller unn is utilizedtoapproximatethe ideal controller and thecompensationcontroller
u1,t
isdesignedto compensate for theapproximation errorbetween the neural controller and the ideal controller. Substituting (19) into(1),yields
Usi= (5)ad (20u) , +ueqai).
(20)
S=
g(x)(u
-ut7tZ
-U,p
-qsgn(s))
.(21)
By the universal approximation theorem, an optimal
approximator can be designed to approximate the ideal controller, suchthat
u =u +A=
WaTJ(V*S)
+A =W 6 +A (22)where V* and W* aretheoptimal vectors of SONN and A
isthe approximationerror.Letthenumber ofoptimalneurons
be
nW
and theneuronsbedivided intotwoparts.The first part contains n neurons which are the activated part and the secondary part containsnW
-n neurons which do not exist yet. Thus, the optimal weights of NNV*
and W* areclassified intwopartssuchas
V
=-[v" v.*]
and W* = a(23)
where
V.
E R" andW.'
E R are activated parts, andV*
E R( -n) andW*
E R(n* are inactivated parts,respectively. Since theoptimalNN
weights
thatareneededtobest approximate the ideal controller are
unobtainable,
anestimation of
unn
isgivenbyuM
=W (VaS)=Waa (24) where Va and Wa are the estimated values of theoptimal
weights V and W ,
respectively.
Definetheestimatederroru as
U=WU-U(F *(F
= W 6+ W 6. -W 6a +A
=
WT>
= a+Wai+WTf +W:*T(+A
(25)
a6a + a6a + a6a +W6i +i(5
where 6a =u(V x) , x=J(VsX) X a=aa
WV
=W*
-W and V =Va^V
. TheTaylor
seriesexpansionof
(Y'
with respectto Vas canbe derivedas(0 =( +
60V
s+h(26)
where
(o'
is the Jacobian and h is a vector ofhigher-order
terms. Therefore,
a
=(,'V>
S+h. (27) Substituting (27)into(25), yieldsU =WT
OSa
+W"
'o'V S+E(28)
where £=
WTia +W.aT[
+W:h+A
is assumed to be bounded bylel
<E where E is a positive constant. However, the bound ofapproximation error Eis difficult to measure in practical applications. Thus, using the approximation error equation (28), equation (29) can be rewritten ass(t)
-g(x)(WfaTa+
sVa
aW +-uC
-1sgn(s))
.(29)
Inthisderivation, W
ToaVa
s=[WTa'Va s]T is used since it isTheorem 1. Consider a linear ultrasonic motor system expressed by (1). If theself-organizingneural-network-based adaptive control system isdesignedas(19). Aself-organizing
neural network splits up the neurons in the hidden layer if condition (14) is satisfied. The adaptation laws of activated parts Va and Wa aredesignedas
V =_-V =77,S2g(X)(T Wa Wa= -Wa =77,s
9(x)ka
(30) (31) where q, and
q7,
are the positive learning-rates. The compensation controller isdesignedasuCP
=Esgn(s) (32)where E is the estimation of theapproximation errorbound with the estimation lawgivenas
E=-E=
rEs
g(x)l
(33)where
qE
isapositivelearning-rate. Then,thestabilityoftheadaptive self-structuring neural network control system can beguaranteed.
Proof:
Define a Lyapunov function candidate in the following
form
V,(S, VW,E)=-2+ VTV + WTW + 1 E' .(34)
a
a 2 277 a a 2q7 a a 77
~~~~~~
A
where E=E-F. Differentiating(34)with respecttotime
andusing (29),and(30)-(33), gives
VTV WTW EE
V(s,Va,
Wa,
E)=ss+ a+ a a+_
-qg(x)lsl
+esg(x)-Elsg(x)l
<
-(E
-ej)jsg(x)l
<0 .
(35)
Ifthe system dynamic g(x) is unavailable, the g(x) in the adaptive algorithms canbe reorganized as
lg(x)|sgn(g(x))
in practical applications. Therefore, the learning algorithmsfor the SONNAC shown in (30), (31) and (33) can be reconstructedasfollows: (36) Va =)/1S SOT'IW a aa E=
-E
=qmIsI
(37) (38) in which hi = 71g(x)l,
m2
='wg(x)l
andi73
='7E
lg(x)l
The
)1,,
172
andq3
canbe takenasnewlearning-rates.a scale. Therefore, thefollowing theorem can be stated and
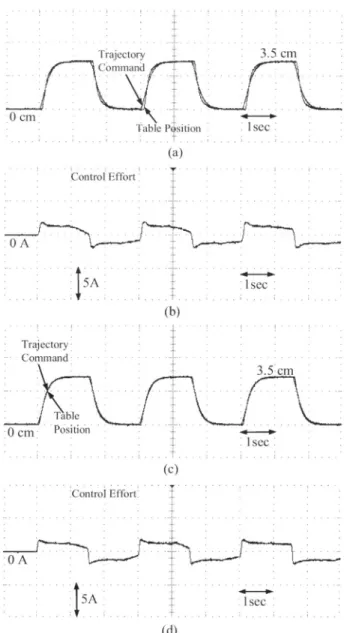
Theexperimental results offixed-structured neural network controlareshowninFig.6. Thetrackingresponsesareshown
inFigs. 6(a)and 6(c); and the torque input areshown in Figs.
6(b) and 6(d) for 7 and 20 hidden neurons, respectively. Experimental results show that the robust tracking performance has beenachieved for different hidden neurons. If the number ofhidden neurons is chosen too small, the convergence ofthe tracking error is slow. On the other hand, if the number of hidden neurons is chosen too large, the computation loading is heavy.
(a)
1,
ControlEffort'
Fig. 4. SONNAC for linear ultrasonicmotorsystem.
A. V. EXPERIMENTAL RESULTS
The computercontrol experimental system for the LUSM is shown in Fig. 5. A servo control card is installed in the control computer, which included multi-channels of D/A,
A/D, PIO and encoder interface circuits. Thepositionof the
movingtable is feedback usingalinear scale. Theproposed
SONNAC system isrealized in the Pentiumusingthe"Turbo C"language. The control interval ofthe control systemare set as2ms. Thecontrolobjective is tocontrol the movingtable to follows a 0.035m periodic step command. Moreover, a second-order transfer function 64 ischosenasthe
s2+16s+64 referencemodel for the step command.
I5A Isec (b) Trajectory Command (c) t o. . 'Control Effort'.: OA ... I5A ; lsec:
LIre
oerectric
CeramicMotorFig.5Computer-controlledlinearultrasonicmotorsystem. To illustrate the effectiveness of the proposed design
method, a comparison between a fixed-structured neural network control in [5] and the proposedSONNAC is made.
(d)
Fig. 6Experimental results of fixed-structured neural networkcontrol.
Then, the developed SONNAC is applied to controlthe LUSM. Theparameters intheproposed SONNC systemare selected as
k,
=2 , k2 =I 5,i =50, q2 =50 , 3 =0.1 v a=0.3, and = 0.5. Theexperimentalresultsof SONNACareshowninFig. 7. Thetracking response is shown inFigs.
7(a); the torqueinputis shown inFigs. 7(b), and the number ofthe hidden node is shown in Fig. 7(c). It shows thatthe
favorable
tracking performance
can be achieved for theproposed
SONNACafter thestructureandparameterlearning
phases.
Moreover,
the SONNAC can on-line create new neurons in the hiddenlayer
as theapproximation
ofneural network isnotgood enough.
le
Isec
are:
1)
the successfuldevelopment
ofanSONNAC,
inwhich theLyapunov
stability
theorem is usedto derive the on-linelearning
algorithms.
2)
theself-structuring
neural network has been created with easysplit-up algorithm
of hiddenneurons to achieve favorable
learning
performance. 3)
the successfulapplication
ofthe SONNAC to control a linearultrasonicmotor.
AcKNoWLEDGMENT
The authors
appreciate
thepartial
financial support from National Science Council of theRepublic
of China under Grant NSC 93-2213-E-i155-038.
Control Effort' A. (b) Number:of Neuro Isec - 11 .0 I10 Isec (c)Fig.
7Experimnental
results of SONNAC.VI. CONCLUSIONS
This paper
developed
aself-organizing
neural-network-based
adaptive
control(SONNAC)
system,which is
comprised
ofaneuralcontroller andacompensation
controller. In the neural controller
design,
aself-organizing
neuralnetwork is utilizedtomimic anidealcontroller. Inthe
compensation
controllerdesign,
an error estimationmechanism is
investigated
to estimate the bound ofapproximation
error. Themajor
contributions ofthis paperRIEFERENCES
[1] F. L.Lewis,A.Yesildirek,and K. Liu,"Multilayerneural-net robot
controller with guaranteed tracking performance," IEEE Trans. NeuralNetw.,7(1996)388-399.
[2] Y.G.Leu,W. Y.Wang,and T. T.Lee,"Robustadaptivefrizzy-neural
controllers foruncertainnonlinear systems,"IEEE Trans. Robotics andAutomation, 15(1999)805-817.
[3] F. J. Lin and R. J. Wai, "Hybrid computed torque controlled
motor-toggle servomechanism using fuzzy neural network uncertainty observer,"Neuirocompuiting48(2002)403-422.
[4] J. Q. Huangand F. L.Lewis. "Neural-networkpredictivecontrol for nonlinear dynamic systems with time-delay," IEEE Trans. Neural
Netw.,14(2003)377-389.
[5] C. M. Linand C. F.Hsu,"Neural networkhybridcontrol forantilock braking systems,"IEEE Trans.NeuralNetw., 14(2003)351-359.
[6] C. T. Lin, "A neural fuzzy control system with structure and parameterlearning," FuizzySetsSyst.,70(1995)183-212.
[7] C. F.Juangand C. T.Lin,"Anonlineself-constructingneuralfuzzy
inferencenetworkanditsapplications,"IEEETrans.FuzzySystems,
6(1998)12-32.
[8] F. J. Lin,C. H.Lin,and P. H. Shen,"Self-constructing fuzzyneural
network speedcontroller forpermanent-magnetsynchronous motor drive,"IEEE Trans.FuzzySystems,9(2001)751-759.
[9] T. Sashida and T. Kenjo, An Introduction to Ultrasonic Motors, ClarendonPress,Oxford, 1993.
[10] K. K. Tan, T. H. Lee and H. X. Zhou, "Micro-positioning of
linear-piezoelectric motors based on a learning nonlinear PID
controller,"IEEEIASMETrans. Mechatoronics, 6,(2001),428-436.
[11] R. J.Wai,F. J.Lin,R. Y.Duan,K.Y.Hsieh and J. D. Lee,"Robust fuizzy neural network control for linear ceramic motor via
backstepping designtechnique,"IEEETrans.FuzzySyst., 10, (2002),
102-1 12.
[12] Y. F. Peng, R. J. Wai and C. M. Lin, "Implementation of LLCC-resonant drivingcircuit andadaptiveCMAC neural network control for linear piezoelectric ceramic motor," IEEE Trans. Ind.