行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※
※ ※
※ 以機電整合為出發點之智慧型嵌入式複合系統控制 ※
※ -新型平面磁浮系統設計控制應用 (第二年度) ※
※ 子計畫一:智慧型嵌入式複合系統控制架構之研發 ※
※
※
※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:□個別型計畫
□整合型計畫
計畫編號:NSC 90-2213-E-002-058
執行期間:90 年 08 月 01 日至 91 年 07 月 31 日
計畫主持人:
顏家鈺 教授
共同主持人:
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立台灣大學機械工程學系
中
華
民
國
91 年
5 月
24 日
子計畫一:智慧型嵌入式複合系統控制架構之研發(第二年度)
Design and Development of an Hybr id Embedded
Contr ol System Ar chitectur e
計畫編號:NSC 90-2213-E-002-058
執行期限:90 年 8 月 1 日至 91 年 7 月 31 日
主持人:顏家鈺 教授 國立台灣大學機械工程學系
計畫參與人員:賴益志、葉雅琴 國立台灣大學機械工程學系
一、中文摘要 本報告重點,在於利用 2D、3D 電磁 模擬技術,以第一年度研究成果為基礎, 考量平板型載台設計,並運用不同的線圈 激磁方式,分析載台可能產生的運動模 式,進一步建立平板型磁浮平台之驅動機 制。另一方面,運用 VHDL 及 FPGA,設 計線圈陣列切換激磁之電路設計,以作為 運動路徑規劃之基礎。 關鍵詞:永久磁鐵、線圈陣列、平面磁浮 平台 Abstr actThis paper, on the basis of first year research results, focuses on the 2D 、 3D electromagnetic simulation of the plate-type carrier of maglev system by means of the finite-element software tool, and analyzing the relationship between the motion of plate-type carrier and the modes of current excited to set up the driving system further. Besides, we take advantage of VHDL and FPGA to achieve the circuit design for controlling the current excited, which is the basis of scheming out the motion route of the carrier.
Keywor ds:Permanent magnet, Coil arrays,
Planar maglev platform
二、緣由與目的 目前工業 界中, 線性 馬達雖應 用漸 廣,但由於其維持在單一軸向運動,使得 許多需作二維線性運動之平台無法僅藉單 一的線性馬達完成,因此限制了單軸線性 馬達的使用普及性。即使如此,要擴充線 性馬達使達雙軸運動能力,並非易事,不 僅結構設計上,致動器及感測器的安排 上,及控制方法的選取上均須作一全新的 考量方能奏功。一旦此新型設計成功完 成,則單層(輕薄)二維定位磁浮平台系 統即可應運而生,其市場潛力匪淺。 而此新型二維定位磁浮平台系統,利 用電磁鐵驅動器作為定位之驅動源,有其 磁力向量控制與整體驅動控制等問題,特 別使用在相差極大的行程,將造成驅動的 電磁力分配上的困擾,再加上要於整個平 面各個電磁鐵之間的協調合作,則非智慧 型的控制架構不可。 本子計畫在「智慧型嵌入式複合系統 控制架構之研究」計畫中實際負責硬體「終 端智慧型驅動控制器」與「中央控制器」 之整體系統架構之建立。利用「智慧型驅 動器」配合「複合式控制系統架構」的目 的是希望以大量的機器智慧達成極高速的 運算,利用這種架構吾人可以設法將高度 非線性系統所需要的複雜計算分散到各個 驅動器的處理器中,利用眾多處理器的分 工,達成極高的採樣速度,進而達成高精 密度與高剛性的整體性能(單層二維磁浮 平台系統實現概念如圖 1)。而本年度研究 乃基於第一年度之研究基礎,利用 2D、3D 電磁模擬技術,考量不同尺寸之平板型載 台設計,並運用不同的線圈激磁方式,分 析載台可能產生的運動模式,進一步建立 平板型磁浮平台之驅動機制。另一方面, 運用 VHDL 及 FPGA,設計線圈陣列切換 激磁之電路設計,以作為載台運動路徑規 劃之基礎。 三、電磁模擬
理論背景 由於磁場為螺旋向量場(∇⋅B=0), 故 可 定 義 出 磁 位 向 量 ( magnetic vector potential)A,並使其滿足下列關係 A B=∇× (1) 又 0 r µ µ µ= ⋅ (2) 真空之導磁係數 : 0 µ 係數 材料相對於真空之導磁 : r µ 故 0 r B H µ µ = (3) 整理可得
( )
A J 1 0 r = × ∇ × ∇ µ µ (4) 此即為靜磁場模擬時,運用有限元素 法求解磁位向量 A之方程式。待解出磁位 向量 A後,場中之磁通密度B及磁場強度 H等物理量,亦可逐一導出。 本 研 究 所 使 用 之 電 磁 模 擬 軟 體 ANSOFT,其磁場能量(此指輔能 coenergy) 計算方式,係利用(5)式及(6)式,其中(5) 式為線性材料之磁場能量,而(6)式為非線 性材料之磁場能量。 dVol H B 2 1 W Vol∫
⋅ = ' (5) dVol H B d W Vol∫
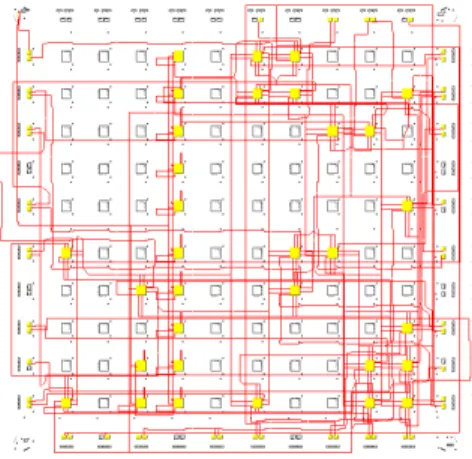
⋅ = ' (6) 而 計 算 力 的 方 法 為 虛 功 法 ( virtual work method),依據力學中的虛功原理, 定義力為: 1 2 1 2 ' ' ' ' s s W W s W s W F − − = ∆ ∆ ≈ ∂ ∂ = (7) s ∆ 為位移 1 W' 為於s 位置之磁輔能1 2 W' 為由s 位置移動 s1 ∆ 至s 位置時之磁2 輔能 ' W ∆ 為 移 動 s∆ 後 , 整 個 系 統 磁 輔 能 (coenergy)之差 電磁模擬流程 利用電磁分析軟體 ANSOFT 作有限元 素數值分析,其模擬流程說明如下(圖 2)。 (a)建立載台及線圈模型:根據實際設計 尺寸圖,繪出系統模型。 (b)選擇材料:相關材料規格,完全根據 實際所用材料來設定。 A、載台為鋁材 B、磁鐵為 NdFeB,Hc=9.9×105 A/m Br=1.29 Tesla C、線圈為銅質材料(380 匝) (c)定邊界條件及激磁來源: 激磁源:一為磁鐵,一為線圈激磁, 電流以安匝設定。邊界條件:將無窮 遠處之磁場設定為零。 (d)產生數值解:求解時設定精確度。 (e)後置處理及分析:利用後置處理模 組,可將所產生的模擬結果,以圖形 或曲線表的方式呈現,也可運用作其 它相關參數之計算。 模擬架構 考量 2D 平板型磁浮平台模型,載台有 5 種尺寸設計模式,分別為 20、30、40、 50、60mm,均為 N 磁極平板型。而線圈驅 動方式以一次激磁 5 組線圈為初步假設條 件,整體模型如圖 3 所示。其中線圈激磁 電流大小值均設定為 1A,另設定載台垂直 移動為 1mm,載台橫向移動 0~20mm(相 當於移動一個線圈之距離),取 9 個 steps。 四、VHDL 及 FPGA 設計一個 FPGA 與外界的介面關係時 可以用 VHDL 語言來描述,因 FPGA 元件 中的邏輯單元(CLB),輸入輸出阜(IOB) 和配線(ROUTING)均可程式化,而且是 以 RAM 形式之可程式結構。本研究所用之 FPGA 元件是美商 Xilinx 公司出品的斯巴 達系列產品中的 XCS05,本身是 84 隻接腳 包 裝 的 IC , 內 部 邏 輯 容 量 有 5000 個 GATES,IO 上限為 80。初步規劃是考慮平 板型磁浮平台,由外界控制載台之移動方 位,每次以移動一線圈距離為基準,而驅 動部分以每次激磁 9~25 組線圈作為設計要 求,而由 FPGA 達成線圈陣列切換激磁的 功能,以作為載台運動路徑規劃之基礎。 五、研究結果與討論 電磁分析部分載台有五種設計模式,均為 N 磁極平 板型,長度分別為 20~60mm(取 5 組), 載台高度設為 1mm。線圈驅動部分設定激 磁 5 組線圈,電流大小值均為 1A,產生磁 極性分別為 SSNSS。初步模擬目標是找出 適當載台尺寸,使載台在此線圈激磁方式 下於移動過程中同時浮起且同時平移(即 所受 X、Y 方向 Force 均為正)。圖 4 分別 是五種尺寸設計所得之 X、Y 方向 Force 圖,可發現長度為 40mm 及 60mm 之載台, 其所產生之 Y Force 幾乎全程為正值,X Force 也大部分為正,故可用來探討載台穩 定浮起之特性分析,以作為載台二維運動 分析之基礎。 以 40mm 及 60mm 之平板型載台作為 進一步線圈激磁方式分析之依據。考量 1 ~6 組線圈所有對稱的激磁方式(如圖 5 所示,共 52 組),搭配 40mm、60mm 載台 進行電磁模擬,整理出模擬結果符合設計 目標之線圈激磁方式(即 X、Y 方向 Force 均為正),如圖 6 所示。再者,將 2D 模擬 轉換為 3D 模擬來作分析,以期求得更符合 實際情形之設計結果。在 3D 模型中,載台 轉換為方形磁鐵,線圈部分考量對稱型線 圈陣列及交錯型線圈陣列兩種型式。 對稱型線圈陣列之 3D 模擬架構如圖 7 所示,初步考量圓柱形線圈及方柱形線圈 兩類,同時搭配圖 6 之 2D 可行線圈激磁方 式作模擬。其中,2D 激磁方式轉為 3D 激 磁方式其轉換概念如圖 8 所示,虛線處表 示可套用 2D 激磁方式。部分符合設計目標 之 40mm 結果以圖 9 作說明;圖 9(a)中共 20 組線圈激磁,圖 9(b)中共 21 組線圈激 磁,其激磁方式及載台移動過程中受力之 模擬結果皆示於圖上,可得初步結論如下: 1. 由 40mm 之模擬結果,發現所有驅動方 式所產生之 F(Z)數值均很大,且大於實 際載台重量(0.3626 N),代表所產生之 浮力足夠。 2. 移動載台分析其 X 方向受力情形,發現 X Force 有產生維持正值之效果。 3. 方形線圈模擬結果略優於圓形線圈。 4. 由 60mm(實重 0.8144 N)之模擬結果, 可發現其現象同於 40mm 之模擬。 5. 證明 2D 之模擬結果可應用於 3D 模擬。 交錯型線圈陣列之 3D 模擬架構如圖 10 所示,初步僅考量圓柱形線圈,同時搭 配圖 6 之 2D 可行線圈激磁方式作模擬。其 中,2D 激磁方式轉為 3D 激磁方式其轉換 概念如圖 11 所示,虛線處表示可套用 2D 激磁方式,進一步整理出可能搭配之線圈 激磁方式,如圖 12(a)表示 40mm 載台所搭 配之線圈激磁方式,圖 12(b)表示 60mm 載 台所搭配之線圈激磁方式。部分符合設計 目標之模擬結果以圖 13 作說明;圖 13(a) 中載台設為 40mm,共 15 組線圈激磁,圖 13(b)中載台設為 60mm,共 19 組線圈激磁 ,其激磁方式及載台移動過程中受力之模 擬結果皆示於圖上,可得初步結論如下: 1. 由模擬結果發現所有驅動方式所產生 之 F(Z)數值均很大,且大於實際載台重 量,代表所產生之浮力足夠。 2. 移動載台分析其 X 方向受力情形,發現 X Force 有產生維持正值之效果,但數 值小於對稱型線圈陣列之模擬結果。 綜合上述 3D 對稱型線圈陣列及交錯 型線圈陣列之模擬結果,深入分析可發現 目前均能找出可行之平台設計及線圈驅動 機制,但其整體效果仍有改善空間,尤其 在將來考量側向磁鐵後,相信性能必會有 所突破。 FPGA 部分 初步規劃是考慮平板型磁浮平台,由 外界控制載台之移動方位,每次以移動一 個線圈距離為基準;驅動部分先以每次激 磁 9 組線圈作為設計要求(可擴充至每次 激磁 16、25 組線圈),而透過 FPGA 達成 線圈陣列切換激磁的功能,以作為載台運 動路徑規劃之基礎。例如規劃載台持續繞 矩形路徑運動,圖 14 則是達成此線圈切換 激磁效果所配置之邏輯線路圖。 六、結論 本 年度之 研究基 於 第 一 年 度 研 究 基 礎,繼續以 2D、3D 電磁模擬技術,探討 磁浮平台之載台設計與線圈激磁模式,並 已設計出可行之載台雛形及相對應之線圈 激磁機制;同時運用 VHDL 及 FPGA,完
成載台二維運動路徑規劃之邏輯線路設 計,為下年度研究奠定良好基礎。 七、計畫成果自評 本計畫依預定之進度已完成載台雛形 設計及相對應之線圈驅動機制,FPGA 線 路部分也已完成階段性設計工作;此外, 平台硬體組裝及實驗分析也開始著手進 行,整體而言已為第三年度之研究奠定良 好基礎。 八、參考文獻
[1] Ansoft Corporation, “ Maxwell 2D Field
Simulator User Reference,” 1993.
[2] Aly F. Flores Filho, Altamiro A. Susin and Marilia A. da Silveira, “Application of Neodymium-Iron-Boron Permanent Magnets on the Assembling of a Novel Planar Actuator,” IEEE Tran. on Magnetics, Vol. 35, No. 5, pp.4034-4036, Sep. 1999.
[3] Cheng, D. K., “Field and Wave
Electromagnetics 2/e,” Addison-Wesley, 1992.
[4] Cho, H.S., Im, C.H. and Jung H.K.,
“Magnetic Field Analysis of 2-D Permanent Magnet Array for Planar Motor,” IEEE Tran. on Magnetics, Vol. 37, No. 5, pp.3762-3766, Sep. 2001.
[5] Davey K.R., “Electrodynamic Maglev
Coil Design and Analysis,” IEEE Tran. on Magnetics, Vol. 33, No. 5, pp.4227-4229, Sep. 1997.
[6] Fitzgerald, A. E., Jr., C. K. and Umans, S. D., “Electric Machinery,” Fifth Edition, McGraw-Hill Inc., New York, 1991.
[7] IEEE, “IEEE Standard VHDL Language
Reference Manual,“ std 1076-1993, 1993.
[8] Trumper, D.L., Olson, S.M. and
Subrahmanyan, P.K., ”Linearizing Control of Magnetic Suspension Systems,” IEEE Tran. on Control Systems Technology, Vol. 5, No. 4, pp.427-438, July 1997. [9] 唐佩忠著, “VHDL 與數位邏輯設計”, 高立圖書有限公司。 圖表彙整 圖 1. 單層二維磁浮平台系統概念 圖 2. 電磁模擬流程圖 圖 3. 平板型載台及線圈激磁之模擬架構
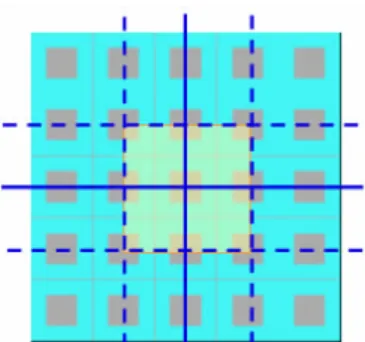
圖 4. 固定電流之 X、Y Force 圖 圖 5. 1~6 個線圈之所有對稱激磁方式 圖 6. 符合要求之線圈激磁方式 圖 7. 對稱型線圈陣列之 3D 模擬架構 圖 8. 2D 激磁方式轉為 3D 對稱型之模擬概念 (a) (b) 圖 9. 對稱型線圈陣列之激磁方式及其模擬結果 圖 10. 交錯型線圈陣列之 3D 模擬架構
圖 11. 2D 激磁方式轉為 3D 交錯型之模擬概念 (a) (b) 圖 12. 可能之交錯型線圈陣列激磁方式 (a) (b) 圖 13. 交錯型線圈陣列之激磁方式及其模擬結果 圖 14. 編譯完成之 FPGA 配置圖