國立交通大學
電信工程研究所
碩士論文
碼同步之相量獲取方法
A Phasor Domain Acquisition Method
for Code Synchronization
研究生:林群明 Student: Chiun-Ming Lin
指導教授:高銘盛 博士 Advisor: Dr. Ming-Seng Kao
碼同步之相量獲取方法
A Phasor Domain Acquisition Method for Code
Synchronization
研究生:林群明 Student: Chiun-Ming Lin
指導教授:高銘盛 博士 Advisor: Dr. Ming-Seng Kao
國立交通大學
電信工程研究所
碩士論文
A Thesis
Submitted to Institute of Communication Engineering College of Electrical Engineerinring and Computer Engineering
National Chiao Tung University In partial Fulfillment of the Requirements
For the Degree of Master of Science
In
Communication Engineering
July 2012
Hsinchu, Taiwan, Republic of China
碼同步之相量獲取方法
學生:林群明 指導教授:高銘盛 博士
國立交通大學
電信工程研究所
摘要
「碼同步」在展頻通訊系統中是一項重要且值得探討的議題,而傳統的作法是在時域 上做序列比對。 藉著快速傅立葉轉換(FFT),我們可以將碼序列轉變為相量,接著利 用逆傅立葉轉換(IFFT),即可找到輸入序列和本地序列的相位差。當碼序列長度增加 時,所耗費的運算量也隨之增加。 本論文中,我們提出一個新的「碼同步」方法,它不需作逆傅立葉轉換以減少運算 量。這個方法主要利用複數相量之間的相位關係,藉此可以擷取所需的相位差。在分 析複數相量的統計特性之後,我們提出一個簡單的方法求相位差。接著, 我們進一步 提出一個進階的方法以提升系統的準確度。最後,我們利用電腦模擬驗證所提的理論, 其中分析的重點在於相位變異數的變化以及估測的準確度。模擬的結果顯示,所提方 法可減少許多運算量並在高 SNR 的環境下可以獲致良好的結果。A Phasor Domain Acquisition Method for
Code Synchronization
Student: Chiun-Ming Lin Advisor: Dr. Ming-Seng Kao
Institute of Communication Engineering
National Chiao Tung University
Abstract
Code synchronization is a critical issue in spread spectrum communication systems. The traditional method to achieve code synchronization is via serial search in the time domain. By performing Fast-Fourier-Transform (FFT), the code sequence can be projected to the phasor domain. Then, code phase between local sequence and input sequence can be found via Inverse-Fast-Fourier Transform (IFFT). However, as the code length increases, the computation increases considerably.
In this thesis, we propose a new method for code synchronization in the phasor domain without IFFT. The method is based on the phase relationship of complex phasors, whereby we can extract code phase via phasor phases. We analyze the statistical property of complex phasors and design a simple method to extract the code phase. Moreover, we further design an improved method to enhance the accuracy under noisy condition. Computer simulation is performed to verify the proposed scheme, which focuses on variance reduction and estimation accuracy. It can be demonstrated that the proposed method works well without much computation while acceptable accuracy is achievable in high SNR environment.
誌 謝
在本論文中,首先我最感謝的是我的指導教授,高銘盛 博士。不論在課業或是研 究,甚至是人生規劃方面,他總是在旁指導著我。並且老師的指導相當細心且有耐心, 不論是多小的問題他都能很有條理的教導我們。因此,老師就像父親也像朋友。從老 師身上可以學習到許多做人處事的態度及方法,包括老師的好教養以及做事謹慎的態 度。相信這是能從老師身上學到且受用一生的好習慣。 另外,感謝所有實驗室的同學及學長姐們。有問題能一起討論真的很好,使我在 求學方面減少許多困難。也非常感謝我的家人,能給予我優良的求學佳境,在讓我全 心全意的攻讀碩士學位。感謝我的姊姊,因為他非常疼我這個弟弟。也感謝我的姊夫-陳建銘 大夫,希望他能好好對待我姊。最後,特別感謝一個重要的人-「洗濾鏡」小 姐。他在我的研究所生涯中,給予我一個良好的管道宣洩我的情緒,激發我的潛能。 感謝她,希望人生會因此而更美好。 謹將此論文獻給所有幫助過我的人們,共勉之。 2012/07/09Contents
中文摘要
iEnglish Abstract
ii誌謝
iiiContents
ivList of Figures
viChapter 1 Introduction
1Chapter 2 Properties of Phasors
4I. Noiseless Condition……….……...4
II. Noisy Condition………...7
A. Signal Model………..7
B. Vector Analysis………11
Chapter 3 The Proposed Method
14I. Noiseless Condiotn...14
III. A Simple Phase Estimation Method………..17
IV. An Improved Method………..19
V. New Local Sequence………...25
Chapter 4 Simulation Results
28I. First Estimation...28
II. Second Estimation...30
III. Third Estimation...33
IV. Recursive Algorithm...36
Chapter 5 Conclusions
40List of Figures
Figure 1.1: The traditional communication system………3
Figure 2.1: The vector concept of W ………..11 i
Figure 3.1: The estimation flow chart………24
Figure 3.2: A new local sequence ZL………...25
Figure 3.3: The vectors concept of P and i G ………...27 i
Figure 4.1: The flow chart in simulation………...28
Figure 4.2: The standard deviation of i in terms of SNR………...29
Figure 4.3: The standard deviation of q1………30
Figure 4.4: The standard deviation of i and ' under different SNR conditions……...31
Figure 4.5: The standard deviation of q2………33
Figure 4.6: The standard deviations of i and i………..34
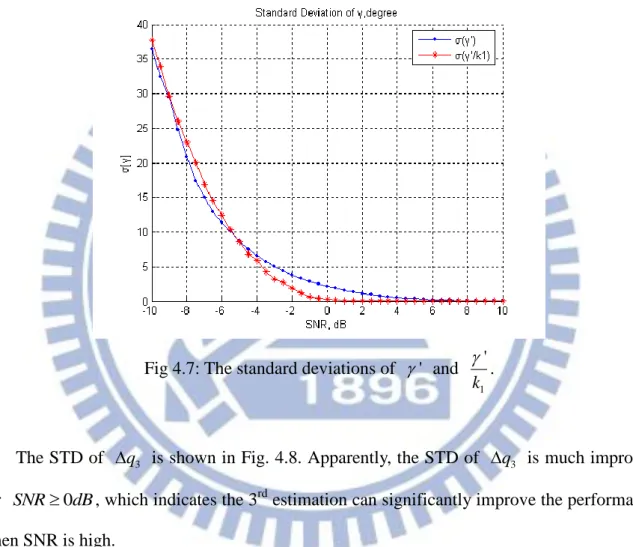
Figure 4.7: The standard deviations of ' and
1
'
k
………...35
Figure 4.8: The standard deviation of q3………...36
Figure 4.9: The standard deviation of ' and
2
'
k
Figure 4.10: The standard deviation of 1 ' k and 2 ' k ………..……. 38
Chapter 1
Introduction
I. Overview
In the traditional digital communication system as shown in Fig-1.1, the information source generates particular symbols at a specific rate. The source encoder translates these symbols into sequences of 0's and 1's. Next, the channel encoder further translates the obtained sequences into another sequences of 0's and 1's, so as to realize high transmission reliability and efficiency. Following the channel encoder, the modulator accepts the encoded bit stream and converts them to signal waveforms suitable for transmission. After passing through the channel, the waveform suffers from amplitude/phase distortion due to the noise, transmission delay and multipath effect. Therefore, the waveform we get at the receiving end might not be the same as the transmitting one. So the primary objective of a communication system is to suppress the bad effects coming from the channel as much as possible.
The inverse process takes place at the destination side. The demodulator converts the signal waveforms to sequences of 0's and 1's, and then the channel decoder translates this sequence to the original one. It also performs error correction and clock recovery. The source decoder finally translates the sequence of into original signals. Recovering the information sequence from the distorted waveform is the main purpose of a communication receiver.
Synchronization in telecommunications networks is the process of aligning the time scales of transmission and switching equipment so equipment operations occur at the correct time and in the correct order. Synchronization requires the receiver clock to acquire and track the periodic timing information in a transmitted signal. The transmitted signal consists of data that is clocked out at a rate determined by the transmitter clock. Signal transitions between 0’s and 1’s contain the clocking information and detecting these transitions allows the clock to be recovered at the receiver.
II. Our work
Our work will not focus on how to recover the information sequence from the distorted waveform, instead the main objective we are interested in is the “code synchronization”, i.e. to find the code phase shift between the incoming sequence and the local sequence at the receiver. This issue is critical in spread spectrum systems where code synchronization must be achieved before signal demodulation.
In order to simplify the problem, we consider the noiseless condition first. When there is no noise accompany with the input sequence, some phase delay exists between the input sequence and the local one. We denote q as the particular shift between them. If the accurate value of q is got, the synchronization is completed. Assume SI (x0,x1,....,xN1) is the input sequence and SL (y0,y1,...,yN1) is the local sequence, whereyk xkq and N is the code length. Our goal is to find the code-phase shift between S and I S , i.e. the value L
of q. We’ll introduce the classic way on dealing with this problem, i.e. the Fast Fourier Transform (FFT) method. By transforming the sequences to the frequency domain via FFT, we find that “q” is imbedded in the phases of complex phasors. Thus we can get it accurately by performing Inverse Fast Fourier Transform (IFFT). In general, N is a large number so that the computation of FFT and IFFT grows rapidly when N increases. To reduce the computation
load, we propose a new scheme which can accurately estimate “q” without IFFT.
The main idea is a little bit tricky. Because the information of q is embedded in the phase of each phasor in frequency domain, we can estimate the code phase via inner product of different phasors. However, even though in high SNR condition, we can’t be sure if the observed phase is close enough to the correct one because of the disturbance coming from noise. The intuitive solution is to reduce the noise variance to some extent such that the estimated code phase will have little probability to be erroneous. Therefore, we design a simple but effective method to decrease the noise variance. It can be proved that the proposed scheme can reduce the computation without losing much accuracy.
The thesis is organized as follows. In Chapter 2, we will introduce the phasor concept of FFT and analyze its properties. Next, the details of the proposed system will be described in Chapter 3 and simulation results will be demonstrated in Chapter 4. Finally, we present the conclusions of this study in Chapter 5.
Chapter 2
Properties of Phasors
Suppose that S is the input sequence and I S is the local sequence, given as L
0 1 1
( , ,...., )
I N
S x x x and SL (y0,y1,...,yN1), wherexi,yi (1,1). We assume q phase shift between these two sequences, i.e.yk xkq.
I. Noiseless condition
In the beginning, we consider the noiseless condition which is easy to be analyzed. For the two sequences of interest, when FFT is performed we get
jNik k N k i x e X 2 1 0
,i0,1,2,...,N1 (2.1) jNik k N k i y e Y 2 1 0
,i0,1,2,...,N1 (2.2) Let | | ji i i X X e (2.3) | | j i i i Y Y e (2.4)where i and i denote the phases of X and i Y , respectively. i
iq N j i iq N j q k i N j q k N k ik N j q k N k ik N j k N k i e X e e x e x e y Y 2 2 ) ( 2 1 0 2 1 0 2 1 0
(2.5)Note that X and i Y share the same amplitude but differ byi 2 iq N
in their phases, where
N i0,1,2,..., . Thus we have |Xi||Yi| (2.6) i i 2 iq N (2.7) Next, we define * i i i V X Y = 2 2 | | jNiq i X e (2.8) Assume S and I S are maximum-length sequences (m-sequences), it can be proved that L
0 1 0 1 | | | | i if N i if Y Xi i (2.9) Using (2.9) we get
0 , ) 1 ( 0 1 2 i if e N i if V iq N j i (2.10)
From (2.10) we know that the code phase “q” is embedded in the phase of V . Note that i V 0
contains no information about q , which is ignored in the following analysis.
Using (2.10), we can get the value of q via IFFT. Letv denote the IFFT of k V , given as i
follows: jNik i N i k Ve v 2 1 0
, k=0,1,2…..,N-1 (2.11) When k q, we get 2 2 1 0 2 2 2 1 0 2 1 0 ) 1 )( 1 ( 1 | | | | N N N X e e X e V v i N i iq N j iq N j i N i iq N j i N i q
(2.12) When k q, we getN N e N e X X e X e e X e V v k q i N j N i k q i N j i N i k q i N j i N i ik N j iq N j i N i ik N j i N i k
) 1 )( 1 ( 1 ) 1 ( 1 | | | | | | | | ) ( 2 1 1 ) ( 2 2 1 1 2 0 ) ( 2 2 1 0 2 2 2 1 0 2 1 0 (2.13)Therefore, by looking for the maximum among{v , the correct code phase can be got. k}
II. Noisy condition
A. Signal modelUnder noisy condition, a gaussion noise denoted as k is added to the transmitted sequence.
In this case, the input sequence becomesSI (w0,....,wN1) and w is given by k
wk s g n (xk k) (2.14)
where “sgn()” denotes the sign function, i.e.sgn(z)1 if z0,sgn(z)1, if z0. To ease the analysis, we modelw as k
wk xkkxk (2.15)
wk xk (2.16)
which means error occurs due tok. Whenk 0, we have
wk xk (2.17)
which means no error occurs.
Let P denote the chip error probability. From (2.15), it is easy to have the following e
probabilities:
e
k P
P( 2) (2.18)
P(k 0)1Pe (2.19)
Thus, ifP is known, the statistical property ofe w can be derived. k
For the input sequence(w0,w1,...,wN1), we perform FFT to get
ik N j k N k i we W 2 1 0
, i0,1,....,N1 (2.20)2 1 0 2 1 0 2 2 1 1 0 0 2 1 0 2 1 0 [ ] [ ] [ ( ) ] [ ] [ ] [ ] N j ik N i k k N j ik N k k k k N j ik N j ik N N k k k k k N j ik N i k k k N j ik N i k k k E W E w e E x x e E x e x e E X x e X E x e
(2.21) Since E[k]2Pe0(1Pe)2Pe (2.22) Thus i e i e i ik N j k N k e i i X P X P X e x P X W E ) 2 1 ( ) )( 2 ( ) 2 ( ] [ 2 1 0
(2.23)Let A denote the mean of i W , then i
i e
i P X
A (12 ) (2.24)
UsingA , we can model i W as i
where n is a zero-mean complex random variable. i
The variance of n , denoted as i n2, can be derived as follows:
2 * * * * * * * 2 | | ] [ ] [ ] ) )( [( ] [ i i i i i i i i i i i i i i i i i n A W W E A A W A W A W W E A W A W E n n E (2.26)
It can be proved that
E[WiWi*]|Xi|2 4Pe|Xi|2 4PeN (2.27) Thus 2 2 2 2 2 2 2 | | 4 4 | | ) 2 1 ( 4 | | 4 | | i e e i e e i e i n X P N P X P N P X P X (2.28) From (2.9) , we get n2 4PeN4Pe2(N1)4Pe(1Pe)N (2.29) When N is large, we can model n as a zero-mean gaussian random variable whose i
B.. Vector analysis
Now, we would like to apply the concept of vector to help analysis. Let
j i i
i W e
W | | (2.30) where i is the phase of W . As shown in Fig. 2.1, if we look i W ,i A and i n as vectors in i
the complex plane, from (2.25) the following relationship holds:
Wi Ai ni (2.31) Im n i W i i A i i Re Fig. 2.1: The vector concept of W i
In Fig. 2.1, we have
i i i (2.32)
angle between Wi and Ai. Note that i is a random phase caused by noise. Let * ( ) 2 | || | | || | i i i i i i j i i j iq N i i V W Y W Y e W Y e (2.33)
Obviously, the phase of V still contains the information ofi q, but is disturbed byi. When IFFT is performed, we obtain:
jNik i N i k Ve v 2 1 0
, k 0,1,...,N1 (2.34) If k q, then iq N j j i i N i iq N j j i i N i iq N j i N i q e e Y W e e Y W e V v i i i i i 2 ) ( 1 0 2 ) ( 1 0 2 1 0 | || | | || |
(2.35) From (2.7) we get i i 2 iq N (2.36) Hence) s i n | | c o s | | ( 1 | | 1 | || | 1 0 1 0 1 0 1 0 i i N i i i N i j i N i j i i N i q W j W N e W N e Y W v i i
(2.37)Owing to the symmetric property of FFT, the imaginary part of vq is zero so that
i i N i q N W v 1 | |c o s 1 0
(2.38)Note that for a given W , because i i is a random variable so that |Wi|cosi is random
Chapter 3
The Proposed Method
Since the computation of FFT and IFFT is proportional toNlogN, it results in considerable computation when N is large. Therefore, we intend to reduce the computation by using the phase information of complex phasors. It is found that the proposed method can much reduce the computation in high SNR condition. The details of our method are described below.
I. Noiseless condition
First, we review the formulas got in the previous chapter under noiseless condition. Assume
0 1 1
( , ,...., )
I N
S x x x is the input sequence and SL (y0,y1,...,yN1) is the local sequence, whereyk xkq. When FFT is performed, we get
jNik k N k i x e X 2 1 0
,i0,1,2,...,N1 (3.1) jNik k N k i y e Y 2 1 0
,i0,1,2,...,N1 (3.2) iq N j i i i i e X Y X V 2 2 * | | ,i0,1,2,...,N1 (3.3)When i0, it is obvious that the phase of V contains the information about q. Note that i
2 2 ( 2 ) j iq j iq n N N e e (3.4) for any integer n , there is phase ambiguity in the phase of V . This fact should be carefully i
considered in estimating q. From (3.3) we get 2 * 2 1 1 1 | 1| j q N V X Y X e (3.5) Because 0qN1 so that 0 2 q2
N , there is no phase ambiguity presents in the
phase of V . Thus we can obtain q directly from the phase of 1 V under noiseless condition. 1
However, the problem becomes complicated when noise presents.
II. Noisy condition
In noisy condition, the input sequence becomes SI (w0,w1,...,wN1), where wk xx k
and k is a gaussian noise. As before, we perform FFT to get
jNik k N k i we W 2 1 0
, i0,1,....,N1 (3.6) We can express W as i j i i i W e W | | (3.7) where i is the phase of W . Let ij i i i i i WY V e V * | | (3.8)
From (2.34), the phase of V is given as i i iq i N 2 (3.9)
where i is a random phase caused by noise. Apparently,icontains the information of q, which can be employed to estimate the code phase.
Under noisy condition, from (3.9) we get
1 2 q 1 N
(3.10)
where 1 is the random phase caused by noise. Define
) 2 ( 1 1 N r o u n d q (3.11)
where “round(z)” denotes the closest integer of z. We may take q as the 11
st
estimation of
q and define
q1 q q1 (3.12)
where q1 indicates the error between q1 and q.
It is noteworthy to mention that 2
N
is a huge number when N is large, which means
the error phase in 1 could possibly be amplified by a large factor in (3.11). In other words,
III. A simple phase estimation method
Using the phases of V given in (3.10), we can get the 11
st
estimation and then obtain q1.
However, the random phase 1 and a large value of N may result in unacceptable estimation error. This problem can be resolved with the help of other phases of V . i
The intuitive way to improve the estimation accuracy is to reduce the variance caused by
1
as much as possible. According to the Law of Large Numbers, the average of random variables obtained from a large number of trials is close to their expected value, and tends to become closer as more trials are performed. It is obvious that the terms Vi (for i>1) can be
used since they do contain the information of q. However, we can’t employ them directly due to the inherent phase ambiguity accompanied with their phases. In order to overcome phase ambiguity, we propose the following approach. Let
0 1 2 ( ) * 0 0 1 | 0| | 1| j q N F V V V V e 2 3 2 ( ) * 1 2 3 | 2| | 3| j q N F V V V V e 4 5 2 ( ) * 2 4 5 | 4| | 5| j q N F V V V V e ‧ ‧ ‧ 2 1 2 ( ) * 2 / 2 2 1 | 2 | | 1| N N j q N N N N N N F V V V V e (3.13) In general, 2 2 1 2 ( ) * 2 2 1 | 2 | | 2 1| i i j q N i i i i i F V V V V e (3.14)
where each i in (3.13) is an independent random variable. Eq. (3.14) could be rewritten as ) 2 ( 1 2 2 | | | | j Nq i i i i V V e F (3.15) wherei 2i 2i1. Note that the phase of Fi can be divided into two terms, i.e. the
co-phase term iq N
2
and the random phase termi.
When the set of {Fi,i0,1,...,N2} is available, we define
i M i F M f
1 0 1 (3.16)where M is an integer. We may express f as
j
f f e (3.17)
where is the phase of f . When N is sufficiently large, according to the Law of Large
Numbers we get
2 q N
(3.18) Therefore, could be expressed as
' 2 q N (3.19)
than of βi, which will result in more precise estimation of 2 q N . We will demonstrate it with the simulation to be presented in Chapter 4.
After is got, we define
) 2 ( 2 N r o u n d q (3.20) where q denotes the 22
nd
estimation of q. Obviously,q will be more accurate than q2 1.
Moreover, the error of the 2nd estimation is given as
q2 qq2 (3.21)
IV. The improved method
As shown above, we may apply the Law of Large Numbers to lower the variance in phase estimation. However, the estimation error may not be small enough since it should be less than 2/N in order to get a correct estimate of q. When N is large, as is usually the case, q2 may not be small enough. Therefore, we are obliged to further reduce the variance by using the special relationship given in (3.8).
In probability theory, ifXis a random variable and a is a constant, we have the
following equality: ( ) 12 V a r(X) a a X V a r (3.22) where “Var(z)” denotes the variance of a ransom variablez. When a1, the variance of
a
After the 2nd estimation, we take as the estimate of q N
2
, which may deviate from
q N
2
by a random phase '. Assume k is an integer and k 2. If is close to q N
2
, it
is expected that k is close to 2 kq N
. The idea is: if we can get a good estimate of
2 k
q N
, then a better estimate of q N
2
is got due to the multiplication factor of k. However,
the phase ambiguity problem possibly occurring in the term 2 kq N
should be carefully considered.
Now, we begin to describe the proposed method. Assume k 2 is a given integer. Let
0 2 ( ) * 0 0 | 0| | | k j kq N k k G V V V V e 1 1 2 ( ) * 1 1 1 | 1| | 1| k j kq N k k G V V V V e 2 2 2 ( ) * 2 2 2 | 2| | 2| k j kq N k k G V V V V e ( 3.23) ‧ ‧ ‧ ( 2 ) / 2 ( 1 ) / 2 2 ( ) * ( 1) / 2 ( 1) / 2 ( 1) / 2 | ( 1) / 2| | ( 1) / 2| N k N j kq N N N k N N k N G V V V V e In general, 2 ( ) * | | | | j Nq i k i i i k i i k i G VV V V e (3.24)
Note that due to the symmetric property of FFT, we only take i=1~ 1 2
N
in the above equation.
Asαi, i=0,1,2,…, N-1, are independent random variables, the term ( i i k ) could be
expressed as a random variable i whose variance is the same as i. Then we obtain
2 ( ) * 1 | | | | , i=1,2,3,..., 2 i j kq N i i k i i i k N G VV V V e (3.25) where i i i k and ) ( ) ( i Var i Var (3.26)
Next, by summing Gi we get
i M i G M g
1 0 1 (3.27) Assume j g g e (3.28) where 2 ( k q ') mod 2 N (3.29)In (3.29), the variance of ' will be much smaller than of i. Note that because of the
mod-2 operation, in general is not equal to 2 kq '
N
. This fact should be taken into account in estimating q.
For a given , from (3.29) we have the following equality:
2 k q ' 2n N
(3.30)
where n is an unknown integer sinceq is still unknown. Suppose that n is known, then
2n 2 ' q k N k (3.31) Let h 2n 2 q ' k N k (3.32)
We take h as the estimation of 2 q N
, whose mean is given by
h 2 q E[ ' ] 2q
N k N
(3.33)
whereE[ '] 0 is assumed. On the other hand, the variance of h is given by
2 2 2 2 ' 2 ' [( ) ] [( ) ] 1 h E h h E k k (3.34)
where 2' denotes the variance of '. It is easy to see the variance of h can be much reduced if k is large.
It’s noteworthy to mention that in estimating the phase of 2 kq N
k, where q N
2
. When we multiply by k, the error phase accompanied with is also amplified. As a result, although a large k is desired to reduce the variance of h, it also increases the risk of erroneous mod-2 operation. Therefore, choosing an appropriate value of k is a critical issue.
When k is close to 2n , it is probably for erroneous mod-2 operation to occur. Accordingly, we choose k to be around (2n1) to avoid it. Because the larger of k, the more risk of erroneous mod-2 operation, for safety reason in the beginning we take
k 3 (3.35) In turn k is calculated as
k round(3)
. (3.36)
When k 3 is taken, we get n1 in (3.30). After a more accurate value of 2 q N
is got, we can increase k by taking a larger n so as to further reduce the error phase. Thus,
we may design a recursive algorithm to gradually increase k. The algorithm is shown in Fig. 3.1, whose operation is described below.
Assume q
N
2
has been obtained. First, we take n1 and get k k1 with (3.36). After a more accurate estimate of q
N
h2 is got, we set nn1 and get k k2
to obtain a more accurate estimate of q N
2
. The process can be repeated until the required accuracy is met.
Xi,Yi Recursive Process n=n+1 The nth estimation
Fig 3.1: The estimation flow chart
1 2 1 N j i i
f
F
f e
(2 1) n n k round h 1 2 1 = N j i i g G g e
2n h k Vi=XiYi* * 1 i i iF
V V
* n i i k i G V V i V i F Let h= n k i G V. New local sequence
In the above method, when q is small the estimated q N
2
will be close to zero, in this case k will be a rather large number to make k 3. Under this circumstance, it has high risk for erroneous mod-2 operation. Therefore, we have to design a scheme to resolve this problem.
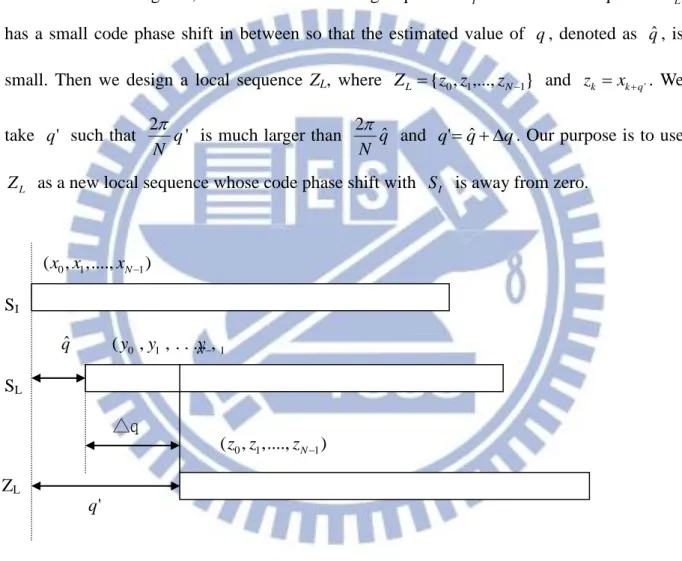
As shown in Fig. 3.2, we assume the incoming sequence S and the local sequence I S L
has a small code phase shift in between so that the estimated value of q, denoted as qˆ, is small. Then we design a local sequence ZL, where ZL {z0,z1,...,zN1} and zk xk q '. We
take q' such that 2 q'
N
is much larger than q N ˆ
2
and q'qˆq. Our purpose is to use
L
Z as a new local sequence whose code phase shift with S is away from zero. I
( , ,....,x x0 1 xN1) SI qˆ (y0 ,y1 , . . . . ,Ny 1 ) SL △q q'
Fig 3.2: A new local sequence ZL.
Under noiseless condition, we have qˆq. When FFT is performed, we get the following equation:
0 1 1
( , ,....,z z zN) ZL
2 1 0 2 1 ' 0 2 2 1 ( ') ' ' 0 2 ' N j ik N i k k N j ik N k q k N j i k q j iq N N k q k j iq N i Z z e x e x e e X e
(3.37) Let U be defined as i Ui X Zi *i ,i0,1,2,...,N1 (3.38) The relationship between V and i U is given by i* 2 ' 2 2 ( ) 2 2 2 2 2 | | | | | | i i i j iq N i j i q q N i j iq j i q N N i j i q N i U X Z X e X e X e e V e (3.39)
It’s obvious that there is 2 i q N
phase difference between Vi and Ui. In (3.25), we have
2 ( ) * 1 | | | | , i=1,2,3,..., 2 i j kq N i i k i i i k N G VV V V e (3.40)
q k N j i q k N j k i i q k i N j k i q i N j i k i i i e G e V V e V e V U U P 2 2 * ) ( 2 * 2 * (3.41)
As shown in Fig 3.3, the two phasors G and i P have a phase difference of i 2 q
N
in
between. By choosing an appropriate value of q, it is easy to make 2 q'
N
away from zero. Thus, when Z is used as the new local sequence, the same algorithm can be applied to get L
the estimate of q'. After q' is got, it is easy to obtain qq'q, while q is a known parameter which represents the code phase between S and L Z . L
Im Re Fig 3.3: The vectors concept of Pi and Gi
2 q N 2 i q N i G i P
Chapter 4
Simulation Results
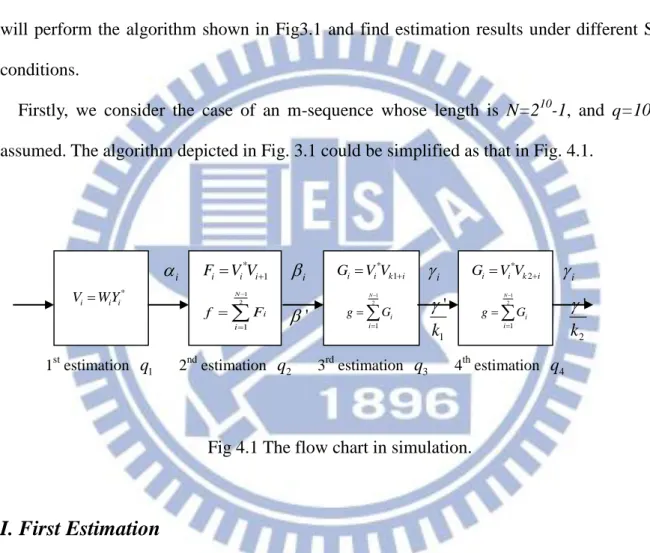
After introducing the proposed algorithm, we will show simulation results in this chapter. We will perform the algorithm shown in Fig3.1 and find estimation results under different SNR conditions.
Firstly, we consider the case of an m-sequence whose length is N=210-1, and q=100 is
assumed. The algorithm depicted in Fig. 3.1 could be simplified as that in Fig. 4.1.
i i i i ' 1 ' k 2 ' k
1st estimation q1 2nd estimation q2 3rd estimation q3 4th estimation q4
Fig 4.1 The flow chart in simulation.
I. First Estimation
Recall that in the first step, we employ V which contains information of q without phase 1
ambiguity as the initial guess, and then obtain q1 as the 1st estimation. The equations involved
in this estimation are given as follows:
* 1 1 1 1 | |1 j V W Y V e (4.1) * i i i V WY * 1 i i i F V V 1 2 1 N i i f F
* 1 i i k i G V V 1 2 1 N i i g G * 2 i i k i G V V 1 2 1 N i i g G 1 2 q 1 N (4.2) ) 2 ( 1 1 N r o u n d q (4.3) q1 q q1 (4.4)
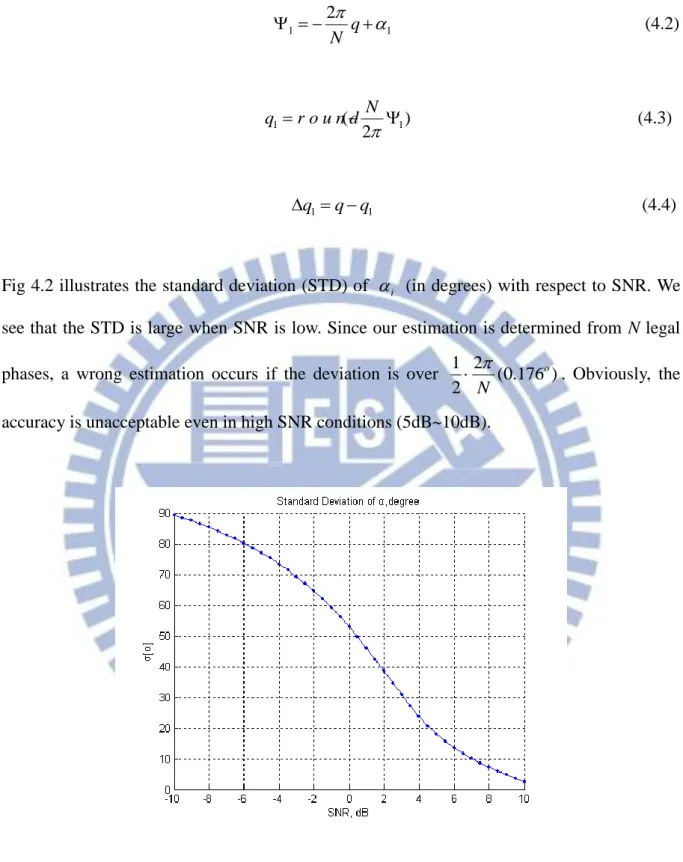
Fig 4.2 illustrates the standard deviation (STD) of i (in degrees)with respect to SNR. We see that the STD is large when SNR is low. Since our estimation is determined from N legal phases, a wrong estimation occurs if the deviation is over 2 (0.176 )
2
1 o
N
. Obviously, the
accuracy is unacceptable even in high SNR conditions (5dB~10dB).
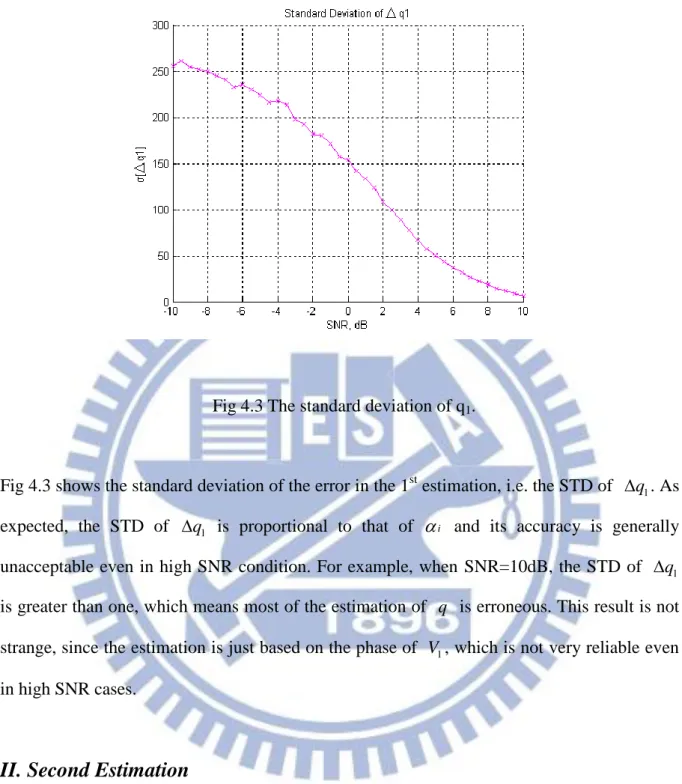
Fig 4.3 The standard deviation of q1.
Fig 4.3 shows the standard deviation of the error in the 1st estimation, i.e. the STD of q1. As expected, the STD of q1 is proportional to that of i and its accuracy is generally
unacceptable even in high SNR condition. For example, when SNR=10dB, the STD of q1
is greater than one, which means most of the estimation of q is erroneous. This result is not strange, since the estimation is just based on the phase of V , which is not very reliable even 1
in high SNR cases.
II. Second Estimation
In the second estimation, we transfer V to be i F which contains the information of q as i
well. Since the random phase of F , denoted as i i, is equal to i i1, the variance of i is larger than of i. However, we may apply the Law of Large Number to lower the variance
by summing phasors. The equations involved in this procedure are shown as follows:
2 ( ) * 1 | | | 1| i j q N i i i i i F VV V V e (4.5)
1 2 (2 ') 1 N q j j N i i f F f e f e
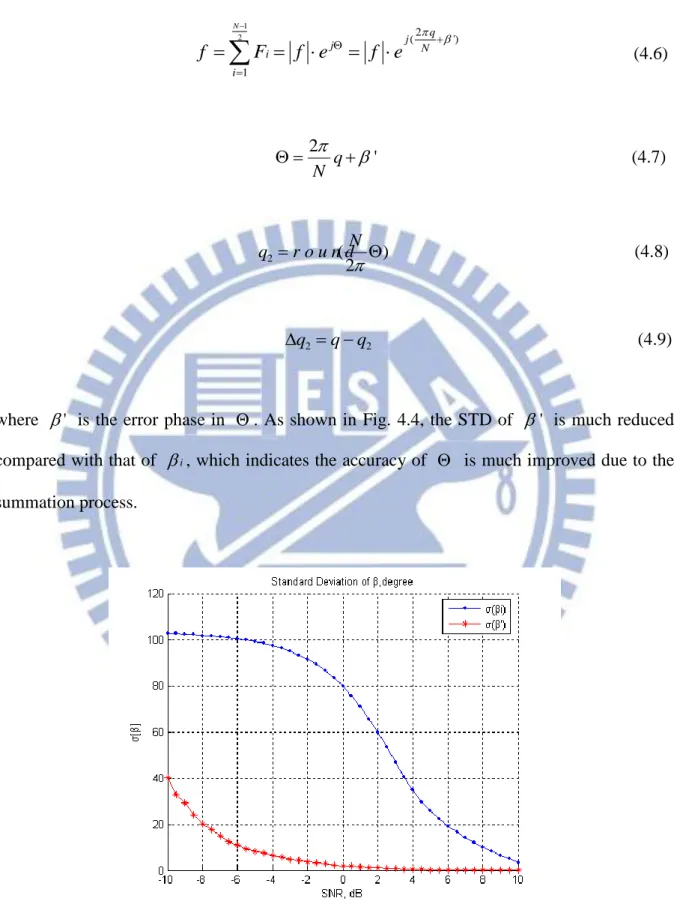
(4.6) 2 ' q N (4.7) ) 2 ( 2 N r o u n d q (4.8) q2 qq2 (4.9)where ' is the error phase in . As shown in Fig. 4.4, the STD of ' is much reduced compared with that of i, which indicates the accuracy of is much improved due to the
summation process.
Fig 4.4 The standard deviation of i and ' under different SNR conditions.
theory, if X , i i1,2,...,n, are independent and identically distributed random variables, we have ) ( 1 ) 1 ( 1 i i n i X Var n X n Var
(4.10) Substituting 1 2 Nfor n in (4.1) and take square root in both sides, the relationship
between the STDs of ' and i are given by
1 ( ' ) ( ) 1 2 1 ( ) 22.616 i i N (4.11)
Because i and ' are random phases in the complex domain, there are two special
properties of them:
(1) The range of phase is [ , ], (2) j j( 2k )
e e .
These two properties make the relationship between (') and (i) becomes nonlinear, but not the linear one given in (4.11). However, Eq.(4.11) is still an important reference for our simulation, because it is close to the simulated result when SNR is high.
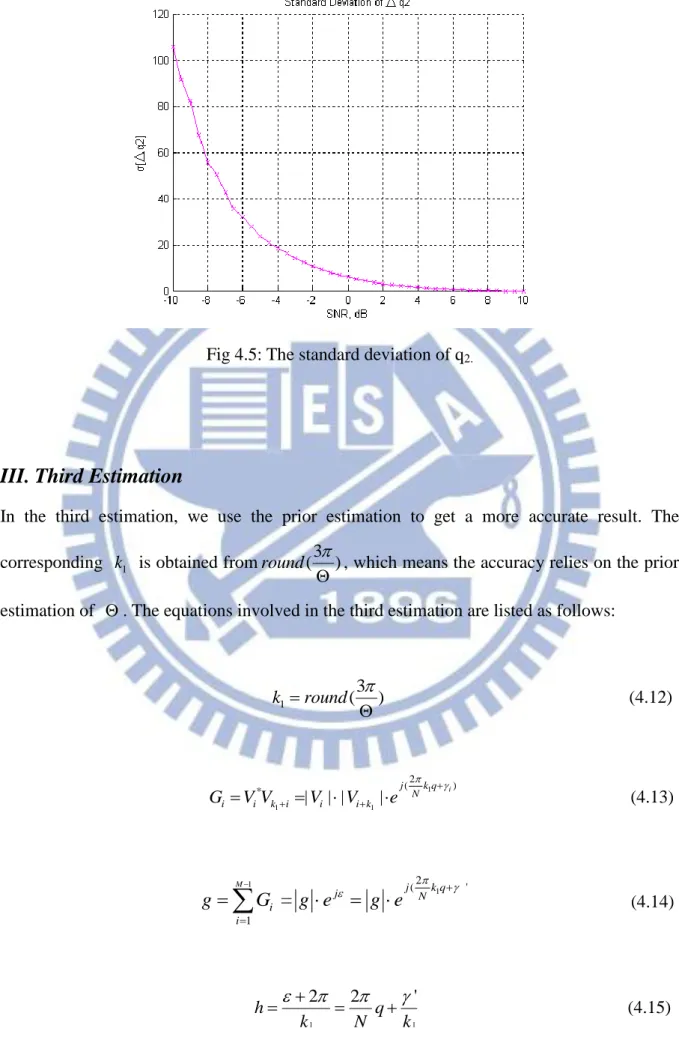
Fig 4.5 shows the STD of q2 in terms of SNR. Obviously, the STD of q2 is much
improved in high SNR cases due to the reduced variance of '. Therefore, after the 2nd estimation we would have an accurate estimation of q for SNR5dB.
Fig 4.5: The standard deviation of q2.
III. Third Estimation
In the third estimation, we use the prior estimation to get a more accurate result. The corresponding k is obtained from1 round(3)
, which means the accuracy relies on the prior
estimation of . The equations involved in the third estimation are listed as follows: k1round(3) (4.12) 1 1 1 2 ( ) * | | | | j Nk q i i i k i i i k G V V V V e (4.13) 1 1 2 ( ' ) 1 = M j k q j N i i g G g e g e
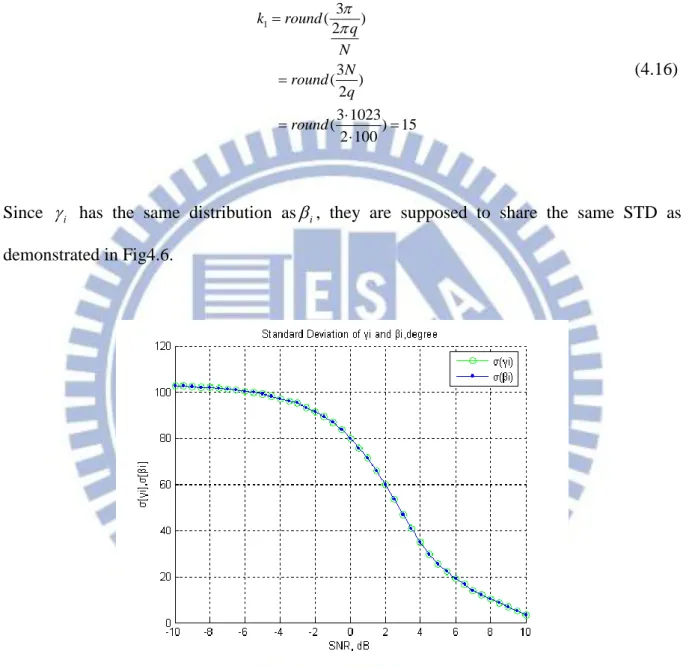
(4.14) 1 1 2 2 ' h q k N k (4.15)For the case of q100 assumed in the simulation, the parameter k is calculated as 1 1 3 ( ) 2 3 ( ) 2 3 1023 ( ) 15 2 100 k round q N N round q round (4.16)
Since i has the same distribution asi, they are supposed to share the same STD as demonstrated in Fig4.6.
Fig 4.6: The standard deviations of i and i.
Next, we focus on the ratio of ( ') to ( '/k1). The simulation result is shown in Fig 4.7,
where the STD of ' k/ 1 is reduced when SNR > -5dB. But it even increases when SNR < -5dB. It is because of the undesired mod-2 operation that leads to the increase of ( '/k1)
in low SNR cases. Recall that k1 is obtained from 3 ( ) round , which means if 1 2 q k N is larger than 4 or smaller than2 , the undesired mod-2 operation occurs. From (4.15), we could infer that it will result in increased STD since we add or subtract a factor of
1 2 k in the calculation.
Fig 4.7: The standard deviations of ' and
1
'
k
.
The STD of q3 is shown in Fig. 4.8. Apparently, the STD of q3 is much improved for SNR0dB, which indicates the 3rd estimation can significantly improve the performance when SNR is high.
Fig 4.8: The standard deviation of q3.
IV. Recursive algorithm
In the third estimation, we figure out that the improvement in estimation accuracy is closely relate to k . And the reliability of 1 k depends on the accuracy of prior estimation. Now, 1
since we have more accurate result after the third estimation, we can proceed to improve the accuracy with the recursive algorithm described before.
In the beginning, we take k k2 and repeat the process similar to the 3rd estimation as follows: k2 round(11 ) h (4.17) 2 2 2 2 ( ) * | | | | j Nk q i i i k i i i k G VV V V e (4.18) 1 2 2 ( ') 1 = M j k q j N i i g G g e g e
(4.19)2 2 2 2 ' h q k N k (4.20) The corresponding k should be 2
2 1 1 ( ) 2 11 ( ) 2 11 1023 ( ) 2 100 56 k round q N N round q round (4.21)
Fig 4.9: The standard deviation of ' and
2
'
k
As depicted in Fig 4.9, we find that the performance is still bad when SNR is low, but it is improved for SNR5dB. This result is similar to the 3rd estimation.
The comparison between ('/k1) and ('/k2) is shown in Fig 4.10. Since the
proposed method relies on the accuracy of prior estimation, the relationship between )
/ ' ( k1
and ('/k2) is not meaningful in low SNR condition. Thus, we merely show the simulation result for SNR010dB. From Fig 4.10, the ratio of ('/k1) to ('/k2)
is pretty close to the expected value of 15
56. Recall that a wrong estimation occurs once the deviation is over 2 (0.176 )
2
1 o
N
, the correct probability of the 4th estimation is much better than that of the 3rd.
Fig4.10: The standard deviation of
1 ' k and 2 ' k
Finally, we present the correct probabilities in detecting the code phase with the recursive algorithm with n3,4,5,6 in Fig. 4.11. As shown in the figure, the correct probability is enhanced with the recursive algorithm. Since the recursive algorithm is based on the prior estimation, we can’t increase the correct probability even if we increase the number of iterations in low SNR cases. The result reveals that a more accurate estimation method is needed for the 1st estimation when SNR is low.
Chapter 5
Conclusions
In this thesis, we propose an effective method to achieve code synchronization. In Chapter 2, we introduce basic principle of the FFT method to achieve code synchronization. By performing FFT, the input sequence is projected to the phasor domain, where we get Xi. Then
we compare the phase ofX with the local phasor Yi i. It is found that there is a regular phase
difference within which the code phase q is embedded. Thus we define a factor Vi as the
inner product of Xi and Yi, and it contains information of q. However, due to the inherent
phase ambiguity, we could not interpret the code phase q directly from Vi. Furthermore, we
employ the phasor concept and perform analysis to understand the statistic properties of these phasors.
In general, the sequence length N is a large number. It is known that the computation of FFT and IFFT is in the order of N log N, which means considerable computation is required when the sequence length is long. Therefore, we intend to reduce the computation by using the phase relationship between phasors. By the mathematic analysis, we find every term of Vi
contains information of q, but it can’t be used to get q directly due to inherent phase ambiguity. If we can solve the phase ambiguity problem, the computation caused by IFFT can be saved. Then, by observing the phase of inner product of Vi and Vi+1, we find it contains
information of q without phase ambiguity in noiseless condition. However in noisy condition, the estimation will be strongly affected by noise, which leads to erroneous estimation. In order to improve it, we propose a simple solution to reduce error phase by using the Law of
Large Number.
deviation is larger than 2
N
, a wrong estimation occurs. From the simulation result, even a tiny phase deviation may lead to incorrect value of q. Thus, we propose an improved method to further reduce error phase. By referring to the simple estimation before, we can get the approximated phase angel of Vi*Vi+k. Likewise, when all the terms Vi*Vi+k are summed, we
can obtain a phase whose value is k multiple of q N
2
, and it has the same noise variance as
Vi*Vi+1. Then the variance of error phase is divided by k so that a more accurate estimate is got.
Note that the idea of the improved method can be recursively operated to get more accurate estimation. However, the more estimation the more computation required, so the number of calculations in the recursive algorithm should depend on the SNR.
In Chapter 3 we also design a method to overcome the problem occurring when q is small. It is equivalent to shifting the estimated phase angle to a large value such that the multiplication factor k will not be too large. This method does not reduce noise variance, but requires additional computation. Thus, it is not a necessary process, which is applied only when the estimated phase is close to zero.
In chapter 4, we demonstrate our theory by simulation under different SNR conditions. By analyzing the performance in each step of estimation, we interpret the simulation results and try to overcome the difficulties when SNR is low. Since our method is based on the prior estimation, which means the error may propagate through the process, the only way to enhance the accuracy in low SNR is doing more estimations and costing more computation. In the future, we may design a more accurate method for the 1st estimation, which will improve the performance of the recursive algorithm in low SNR conditions. Moreover, when SNR is known, we can determine the optimum k so as to have the least computation. This n
References
[1] C. Yang, "FFT Acquisition of Periodic, Aperiodic, Puncture, and Overlaid Code Sequences in GPS," Proceedings of the ION GPS 2001, Sept., 2001, Salt Lake City, UT, pp. 137-147.
[2]S. M. Spangenberg, I. Scott, S. McLaughlin, G. J. R. Povey, D. G. M. Cruickshank and P. M. Grant, “An FFT-based Approach for Fast Acquisition in Spread Spectrum Communication Systems,” Wireless Personal Communications, vol. 13, no. 1-2, pp. 27–55, May 2000.
[3] L. Zhao, S. Gao and Y. Hao. “Improved Fast Fourier Transform Processing on Fast Acquisition Algorithms for GPS Signals,’ The Ninth International Conference on Electronic
Measurement and Instruments, vol. 4, pp. 221-224, August 2009, Beijing, China.
[4] N. C. Shivaramaiah, A. G. Dempster and C. Rizos, “Application of Mixed-radix FFT Algorithms in Multi-band GNSS Signal Acquisition Engines ,”Journal of Global Positioning
Systems, vol.8, no.2 .pp174-186, 2009
[5] G. Kolumban, M. P. Kennedy and L.O. Chua, “The Role of Synchronization in Digital Communications Using Chaos - Part I: Fundamentals of Digital Communications, ” IEEE
Transaction on Circuits and Systems—I: Fundamental Theory and Applications, vol. 44, no.
10, pp. 927-936, Oct. 1997
[6] N. F. Rulkov and L. S. Tsimring, “Synchronization Method For Communication With Chaos Over Band-Limited Channel”, International Journal of Circuit Theory and
Applications, vol. 27, pp. 555-567, 1999.
[7] H. Li, X. Cui, M. Lu and Z. Feng , “Dual-Folding Based Rapid Search Method for Long
PN-Code Acquisition,” IEEE Transactions on Wireless Communications, vol. 7, no. 12, pp. 5286-5296, Dec 2008.
[8]H. Li, M. Lu and Z. Feng, “Improved Zero-Padding Method for Rapid Long PN-Code Acquisition,” IEEE Transactions on Signal Processing, vol. 56, no. 8, pp. 3795-3799, Aug. 2008.
Presence of Doppler Shift and Data Modulation,” IEEE Transactions on Communications, vol. 38, no. 2, pp. 241-250, Feb 1990
[10] I. Periˇsa and J. Lindner, “Code Acquisition in Direct Sequence Spread Spectrum Communication Systems Using an Approximate Fast Fourier Transform,” 2006 IEEE Ninth