行政院國家科學委員會補助專題研究計畫
■ 成 果 報 告
□期中進度報告
Multi-Agent 分散式交通監控系統
計畫類別:■ 個別型計畫 □ 整合型計畫
計畫編號:NSC 94 - 2213 - E - 009 - 031 -
執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日
計畫主持人:徐保羅
共同主持人:
計畫參與人員: 幸琮政 林宗翰 劉興漢
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列
管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:
中 華 民 國 95 年 7 月 31 日
行政院國家科學委員會專題研究計畫成果報告
Multi-Agent 分散式交通監控系統
計畫編號:NSC 94-2213-E-009-031 執行期限:94 年 8 月 1 日至 95 年 7 月 31 日 主持人:徐保羅 國立交通大學電機與控制工程系 中文摘要 交通路網是一個非線性的系統, 因此以等待車輛的長度及燈號的Cycle Starting Time作為模糊控制的輸入參 數,設計單一路口的模糊控制器,以 紓解非線性路網的車流。為了符合駕 駛人的用路習慣,本論文利用在不同 Cycle Starting Time的條件下,給予不 同的解模糊化切換值,設計適應模糊 控制方法,使建成的單一路口延滯時 間改善42.4%。 本研究進一步探討大型路網,由於 其非線性程度與複雜度更勝於單一路 口 , 故 提 出 一 個 adaptive fuzzy multi-agent systems 延伸 adaptive fuzzy systems 使用上的彈性,協調彼此交換 控制信號的時間,以進一步改善交通 流量。本文透過 VISSIM 與 VisVAP 內 部函式建立 adaptive fuzzy agents 的溝 通通道與協調機制,以驗證 adaptive fuzzy agents 於多重路口的控制成效; 於一個2 2× 交通路網中,adaptive fuzzy agents 改善了 45.7%平均延滯時間。 關鍵詞:VISSIM、VisVAP、交通控制、 適應性、模糊、代理人 AbstractIn order to design fuzzy controllers
to handle nonlinear traffic systems, the input parameters of the queuing length and the cycle starting time are adopted in the present simulatio n study. The increasing weighting of the threshold value for changing signals in the present implementation is as an adaptive fuzzy controller to overcome the quick-switching problem. This fuzzy adaptive control method improves 42.4% in the delay time.
Furthermore, because a large traffic network is more complicated than a single intersection, the adaptive fuzzy multi-agent system (MAS) is proposed to extend the applications of the adaptive fuzzy systems. By coordinating the control signal among neighboring intersections, the improvement of the delay time for the AF agents in a 2 2× traffic network is around 45%.
Keywords: VISSIM, VisVAP, traffic
一、 前言 隨著科技的進步,各式各樣的交通 工具成為人類生活的一部分,而汽車 的發明更讓它與人類生活密不可分, 但隨著普及率越來越高,交通壅塞的 問題也日趨嚴重,因此,為了解決塞 車問題,往往藉由交通警察於各路口 手 動 切 換 號 誌, 達 到 紓 解 車 流 的 目 的,因此,可以預期一個適當的擬人 化智慧型交通控制器,可以改善塞車 情形。目前有許多的研究利用模糊控 制來取代人為於尖峰時刻的手動操作 [1-3],但往往因為建立過多的模糊規 則,而增加了號誌運算上的複雜度。 因此,本論文期望簡化模糊規則,以 及針對非線性的交通路網設計適應模 糊控制器[4-5],以改善非線性系統變 異的問題,並達到紓解車流成效。 交通路網是一個標準的分散式控 制問題,有許多研究都是針對獨立路 口做智慧型控制器的設計,其目的主 要在取代現行一個或多個交通警察手 動切換號誌的方式;但若欲達成比交 通警察控制路口更好的效果,則需整 合區域內的多個十字路口,這是各交 通警察獨立控制單一路口所不能達成 的任務。交通警察僅針對單一路口車 流作判斷,不與相連路口交換訊息, 由 於 網 路 的 快 速 發 展 , 故 提 出 multi-agent system (MAS)[6-7]協調切 換號誌訊息的方式,希望進一步縮短 車流延滯時間。 交通路網是一個時變與隨機的系 統,因此要模擬它需要設定許多的參 數才可實現,若模擬軟體未能周全的 規劃交通路網,可能會造成模擬結果 與現實生活有很大的落差,使得到的 模擬數據不夠客觀,所以,本論文利 用 德 國 卡 斯 魯 爾 大 學 (University of Karlsruhe)與德國 PTV 交通顧問公司 (PTV System Software and Consulting AG)所 共 同 發 展 的 路 網 模 擬 軟 體 - VISSIM[8],建立交通路網。 VISSIM 提供使用者視覺化的介面設定完整的 路網參數,並可結合 VisVAP 所設計適 應號誌控制邏輯,以驗證各控制器的 成效。 二、 適應模糊控制 2.1 設計並簡化模糊規則 為了建立能模擬交通警察的智慧 型控制器,本論文以 CarsBehindRed、 CarsBehindGreen 與 Cycle Starting Time[9]作為輸入參數。CarsBehindRed 為紅燈後方車輛平均停等長度;此值 越大,代表紅燈後方道路塞車情形越 嚴 重 , 影 響 號 誌 越 快 變 號 。 CarsBehindGreen 為綠燈後方車輛平均 停等長度;此值越大,代表綠燈後方 道路塞車情形越嚴重,影響燈號持續 維持綠燈。Cycle Starting Time 則代表 號誌從紅燈切換到綠燈後的時間。 一般而言,在設計三個輸入的模 糊控制器時,會造成模糊規則更為複 雜,因此,為了減少系統 CPU 的運算 量 , 同 時 能 縮 減 延 滯 時 間 與 紓 解 交 通 , 將 先 分 析 單 一 路 口 在 固 定 時 制 下,車流量大小所造成停等長度差異 的特性,設計並簡化模糊規則數。 從模擬數據得知車輛的平均停等 長度小於 80 公尺,因此在設計號誌歸 屬 函 數 時 , 圖 1-4 , 我 們 將 CarsBehindRed 與 CarsBehindGreen 劃 分為 3 個階層:small、medium 與 large。 此外各歸屬函數圖形的斜率由車輛的 累積程度所決定。在紅燈的情況下, 車輛快速地累積,因此,在 small 與 medium 的交集處,給予較大的斜率,
16 32 48 64 80 0
1 Small Medium Large
CarsBehindRed
圖 1 CarsBehindRed
0 16 32 48 64 80
1
Small Medium Large
CarsBehindGreen 圖 2 CarsBehindGreen 10 20 30 40 50 0 1 Short Long
Cycle Starting Time
圖 3 Cycle Starting Time
0 0 .25 1 1 0 .75 0.5 Yes Pro. Yes Maybe Pro. No No Change Probability 圖 4 Change Probability 藉此表現出在此區段的快速變化率; 相較於紅燈停等的車輛長度,因為綠 燈後方的停等車輛不斷的移出路口, 車輛的累積程度不夠明顯,因此斜率 的 變 化 相 對 紅 燈 情 形 要 小 。 至 於 medium 與 large 的交集區間,無論是 對於紅燈或綠燈,此處的數值都可能 代表塞車情形正在發生,所以為了盡 快處理這種狀況,將增大此區的斜率 值。至於 Cycle Starting Time 為了簡化 模糊規則,主觀的將時間劃分為 short 與 long;當 Cycle Starting Time 的時間 越 長 , 則 意 味 著 切 換 號 誌 的 機 率 越 高。至於切換號誌的期望輸出參數, 則分別為 No、Probably No、Maybe、
Probably Yes 與 Yes 五個離散值。
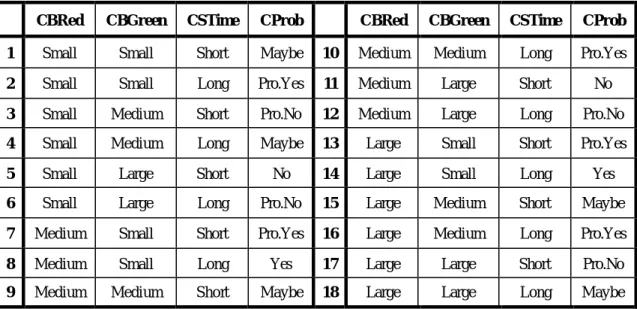
與[9]所提出的 86 條模糊規則相 較,上述的歸屬函數僅需建立 18 條模 糊規則(fuzzy rules),如表 1,並利用 Larsen’s product fuzzy implication rule 作為模糊推論的方法,至於解模糊化 則採用重心法(center of area method; COA)的方式運算,將所得到的數值作 為是否要切換號誌的依據。模糊規則 的建立隨使用者判斷而有所不同,因 此也變得十分的主觀,表 1 為本論文 於模擬中所建立的模擬規則,並將解 模糊化後的號誌切換值設定為 0.6。
表 1 Fuzzy inference engine
CBRed CBGreen CSTime CProb CBRed CBGreen CSTime CProb
1 Small Small Short Maybe 10 Medium Medium Long Pro.Yes
2 Small Small Long Pro.Yes 11 Medium Large Short No
3 Small Medium Short Pro.No 12 Medium Large Long Pro.No
4 Small Medium Long Maybe 13 Large Small Short Pro.Yes
5 Small Large Short No 14 Large Small Long Yes
6 Small Large Long Pro.No 15 Large Medium Short Maybe
7 Medium Small Short Pro.Yes 16 Large Medium Long Pro.Yes
8 Medium Small Long Yes 17 Large Large Short Pro.No
2.2 適應模糊控制 利用 VISSIM 模擬一般模糊控制 器時,發現當東西向與南北向的車流 量皆為尖峰時刻時,模糊控制器採取 快 速 切 換 號 誌 來 達 到 紓 解 車流 的 目 的,然而此方式並不適用於一般日常 生 活 中 ;當 前 方 少 數 車 輛 剛 通 過 號 誌,而後方車輛卻尚未做出反應往前 移動,出車端的車輛仍不斷湧入,因 而造成車輛的回堵,使塞車情形擴散 開來,增加了車輛的延滯時間。因此, 本論文改善模糊控制器,以因應時變 的 交 通 路 網 , 提 出 適 應 模 糊 控 制 (adaptive fuzzy control),使號誌的切換 更符合駕駛人的用路習慣,而適應模 糊控制的設計規則如下:
l Rule 1:當 Cycle Starting Time 在 0~5 秒內時,剛切換號誌,為了避 免快速變號,因此設立 mask,不進 入模糊運算。
l Rule 2:當 Cycle Starting Time 在 6~15 秒內時,車輛開始移動,給予 高切換臨界值 0.63,以延長號誌時 間。
l Rule 3:當 Cycle Starting Time 在 16~50 秒內,由於綠燈號誌已持續 一段時間,故回復模糊運算臨界值 0.6。
然而利用在不同 Cycle Starting Time 的
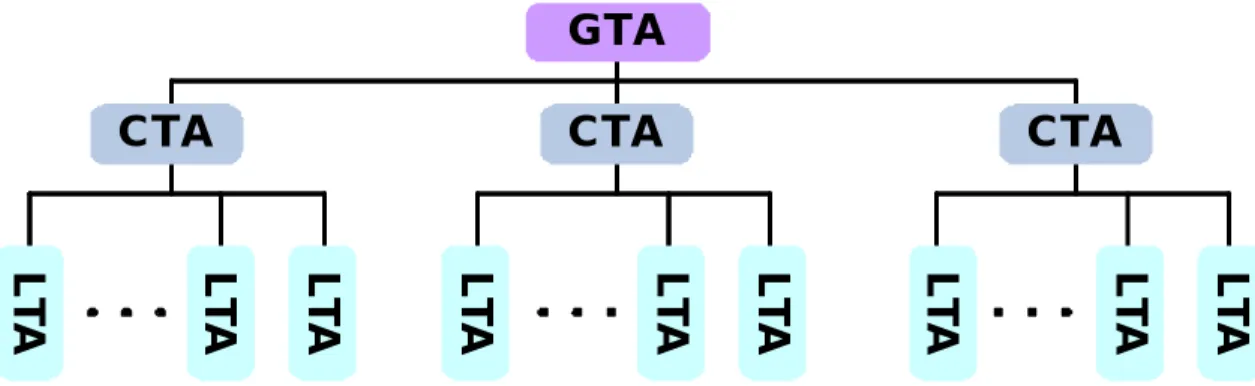
條件下,給予不同的切換權重值,增 加了控制器處理尖峰時刻車流量的能 力,但對於車流量較低的時段,此種 方式卻未必有較好的成效。當車流量 較低時,原本在短時間內即可通過號 誌的紅燈停等車輛,卻因為切換值變 大了,所以必須累積更多的停等車輛 來滿足切換值的要求,這樣的方式不 但增加了紅燈停等的時間,卻也拉長 了車輛延滯時間;但對於整個系統而 言,因為車流量較少的關係,所以並 不會造成太大的改善;但在尖峰時刻 的情形下,這樣的設計方式,卻更能 發揮糊控制的效能。 三、 多代理人系統於區域路網之應用 3.1 多代理人系統於交通路網應用之 架構 對於多代理人應用在交通路網的 架構上,France 與 Ghorbani 於 2003 年 提出了階層式市區交通多代理人模型 [10],如圖 5,對於單一路口的監控以 local traffic agents (LTAs)為主。LTA 具 有獨立思考和解決問題的能力,會針 對單一路口周圍的車流狀況,做出最 佳號誌切換的判斷。即便 LTA 會對單 一路口做出最適合的決策判斷,但對 於全區的交通路網而言,此決策並不 一定是最佳的判斷。因此,必須在 LTA 上 再 建 立 負 責 監 控 LTA 的 代 理 人 coordinator traffic agents (CTAs)。
圖 5 階層式市區交通多代理人模型
CTA
CTA
CTA
GTA
L
T
A
L
T
A
L
T
A
L
T
A
L
T
A
L
T
A
L
T
A
L
T
A
L
T
A
CTA 的 主 要 功 能 是 在 協 調 各 個 LTA 的決策,使得號誌間不會有所衝 突,至使造成交通的混亂。然而,對 於 CTA 而言,它的計算能力是有所限 制的;為了分擔整個路網的計算量, 在階層式的多代理人系統設計中,主 要的計算將分散至各個路口的 LTA, CTA 並不會有太多的運算量,但當路 網擴充到足夠大時,需要多個 CTA 來 分散協調各分支的 LTA 時,可在 CTA 之 上 再 設 立 global traffic agent (GTA)。當然 GTA 並非一個完全必要 的代理人,僅在交通路網足夠大時, 才需設立 GTA。 3.2 代理人的行為規則 考慮兩獨立路口分別存在 LTA1 與 LTA2,而這兩個代理人皆以適應模 糊控制作為其運算法則,因此可以將 這兩個代理人歸類為具有獨立思考計 算能力的智慧型代理人,其主要的功 用在觀察所在路口車流狀況與號誌時 間,做出變號的決策。於此兩個 LTA 上將建立 CTA,CTA 主要將負責協調 兩路口的變號時間,或是刻意製造出 兩路口變號時間的秒差。以下將分別 介紹代理人根據路口狀況和彼此間的 通訊會有的行為規則: 1. Rule 1:獨立運算規則 各路口代理人具有獨立運算的能 力,以等待車輛的長度及燈號的 Cycle Time 作為適應模糊控制的輸入參數, 當 LTA 決定變號時,會將變號訊息透 過 CTA 發送至相鄰路口。 2. Rule 2:協調同步變號規則 LTA 決策切換號誌時,會將變號訊 息透過 CTA 發送至相鄰路口,而各路 口的 agent 交換訊息約需 2 秒確認後, 相鄰路口會受到 CTA 所發出的協調命 令影響,隨 LTA 變號,使各路口號誌 能同相變號,保持車流順暢。例如: 若 LTA1 將東西向號誌變為綠燈,則 LTA2 亦隨之將東西向切為綠燈。 3. Rule 3:協調時間差規則 代理人為分散式獨立架構,因此無 預設何者先行變號,僅透過 CTA 在 LTA 間協調,故可利用 CTA 協調路口 間號誌變號的時間差,如: AF agents_D4:交換訊息 2 秒+協調 秒差 2 秒。 AF agents_D7:交換訊息 2 秒+協調 秒差 5 秒。 4. Rule 4:Mask 規則 選 定 號 誌 在 變 號 為 綠 燈 若 干 秒 內,設定 Mask,不受 CTA 協調變號的 影響,由 LTA 單獨完成適應模糊控制。 當路口擴充至四個路口時,每個路 口 仍 以 適 應 模 糊 控 制 作 為 其 決 策 法 則,與兩個路口主要的不同是兩個路 口僅需考慮東西兩個代理人的溝通協 調,當路網擴增為四個路口時,除了 原先設定之東西向,CTA 還須包含南 北向路口號誌的協調。 四、 VISSIM 模擬實現交通路網控制 VISSIM 是一套普遍應用於交通 規劃的模擬軟體,它不僅提供市區與 高速公路多樣性的應用,並結合大眾 運 輸 工 具 與 私 有 交 通 工 具 設 定 等 功 能。因此,即便在複雜的交通條件下, VISSIM 都可以用視覺化的方式呈現 逼真的交通模型。除此之外,它還具 有設定車輛種類、轉向比、車種組成 比例等功能,而這些設定僅需透過簡 單的使用者介面輸入參數,便可使模 擬環境更貼近日常生活的交通現況; 相較於自行撰寫的模擬軟體,使用者
6
CROSSIG VisVAP
Texteditor
VAP ( e.g. vap214.exe)
VISSIM
database *.pua *.vap *.vv
Definition of stages Calculation of interstages
……… ……… ………
Design and check of flow charts
Stage _active( 1)
Stage _active( 2) Interstage (2,1) Interstage (1,2) Ped _Demand Begin 圖 6 VISSIM 與 VisVAP之關係圖 可能在有限考量下所設計,並無法將 一般道路與車輛特性描述的很細緻, 而 喪 失 了 模 擬 數 據 的 真 實 性 與 可 靠 性。 為了與目前一般交通路口所採用的固 定時制(fixed-time mode)作比較,本論 文利用 VisVAP 設計適應性號誌控制 邏輯;因為它必須架構在 VISSIM 所建 立的模擬環境上,所以在設計控制器 時,使用者無法任意取得所需要的線 上資料,必須利用 VISSIM 有限的即時 資訊,設計參數轉換方程式,才可以 得到使用者設計控制器時所需的輸入 參數。反觀自行撰寫的模擬程式[11], 它提供使用者修改模擬器的能力,所 以使用者可以在模擬過程中輕易的取 得路網即時資訊。這樣的方式雖然提 供更大的彈性供使用者設計號誌,但 本論文希望將人為設計因素的影響降 至最低,因此交通模擬軟體的完整性 與獨立性成為一大考量因素,故採用 VISSIM 做為模擬軟體。 在 號 誌 控 制 方 面 , 固 定 時 制 為 VISSIM 所內建的,我們僅需設定在號 誌週期內紅燈與綠燈相對結束時間, 以及黃燈所佔的秒數,即可達到。至 於 車 輛 觸 動 式 (vehicle actuated method)[12]與模糊控制,則需要使用 VISSIM 的套裝軟體 VisVAP 做適應性 號誌控制邏輯的設計。此套件主要利 用流程圖的概念撰寫程式,透過轉檔 方式將檔案轉換為 VAP 檔,進而與 VISSIM 結合,如圖 6 所示。 本 研 究 在 此 以 車 輛 觸 動 式 說 明 VisVAP 的設計方法。每相至少維持綠 燈 20 秒後,利用圖 7 之偵測器,感測 停等線後方是否有車輛進入。若綠燈 雙 向 皆 無 車 輛, 則 號 誌 將 切 換 為 紅 燈;反之,若停等線後方有車輛,則 號誌維持不變,但是,為了避免號誌 因車輛持續進入偵測區,而造成綠燈 時間過長,因此當綠燈時間維持 50 秒 後,無論停等線後方是否有車輛,號 誌都將強制變號。圖 8 為 VisVAP 設計 車輛觸動式的訊號流程圖。 圖 7 單一路口之車輛觸動式偵測器位置
Start
Interstage (1,2) Stage_ative(1) T_Green (A)>T _Green_min(A)
!(OccT(1)>0) & !(OccT(2)>0) &
!(OccT(3)>0) & !(OccT(4)>0)
Interstage (1,2) 50< T_Green (A )
Interstage (2,1) Stage _ative(2) T_Green (B) >T_Green_min( B)
!(OccT (5)>0) & !(OccT (6)> 0) &
!(OccT (7)>0) & !(OccT (8)> 0)
Interstage ( 2,1) 50<T _Green(B ) End 五、 模擬結果 本論文就固定時制、車輛觸動式、 模糊控制、適應模糊控制與適應模糊 代理人(AF agents)在不同交通路網下 進行模擬,為了比較各控制器的改善 成效,在此以固定時制為基礎,比較 各控制器相對固定時制的改善率,而 改善率計算方式如(1)式所示: 改善率 _ _ _ = D fixed D control 100% (1) D fixed T T T − × 其中 _ D fixed T :路網於固定時制下,東西 向與南北向延滯時間 2-norm 的平均 值。 _ D control T :路網於其他控制方法下,東 西向與南北向延滯時間 2-norm 的平均 值。 5.1 單一路口 單一路口交通路網如圖 7 所示,假 設於模擬過程中,東西向隨模擬時間 每 600 秒 改 變 車 流 量 (300à 500à 800à 1200à 700à 400 veh./hr),在此 稱為 Peak;而南北向之交通流量則分
別有 Light=300 veh./hr 、 Heavy=1000 veh./hr,以及與東西向同為 Peak 的三 種情形。分別比較車輛觸動式、模糊 控制與適應模糊控制於此三種車輛狀 況下相對固定時制的改善率,如下表 2 所示。 表 2 車輛觸動式、模糊控制與適應模糊控制 的改善率
Light Heavy Peak vehicle actuated 27.0 % 3.3 % 7.0 % fuzzy control 41.7 % 30.6 % 35.7 % adaptive fuzzy 42.2 % 36.0 % 42.4 % 由表 2 可知適應模糊控制延長號誌的 綠燈時間,對於整個路網也提供比其 他三種控制方式更大的改善成效,節 省更多的延滯時間。 5.2 雙路口 雙路口交通路網如圖 8 所示,假 設模擬過程中,東西向車流每 600 秒 變動一次(600à 800à 1000à 1200à 900à 700 veh./hr),南北向車流量則分 別有 400、600、800、1000 veh./hr,以 及與東西向相同隨時間改變車流的五 圖 8 車輛觸動式的 VisVAP 訊號流程圖
LTA1 CTA LTA2 LTA3 LTA4 種情形,比較車輛觸動式、適應模糊 控制與利用 3.2 節代理人規則,所設計 的適應模糊代理人(AF agents)相對固 定時制的改善率,如表 3。 從表 3 可知對於大多數的車流狀 態,具有代理人溝通協調特性的控制 器有較佳的改善成效,縮短了交通路 網的延滯時間。對於多路口的控制而 言,單一路口的最佳化,並不能代表 全區路網的最佳化,而需透過代理人 的協調才可以達到全區交通的平衡。 5.3 2 2× 交通路網 四個路口的交通路網如圖 9 所 示,本節將細分為兩個小節,首先在 5.3.1 節中將模擬東西向車流為隨時間 改 變 的 Peak (400à 600à 800à 1000à 700à 500 veh./hr )時,南北向車 流量分別為 400、600、800、1000 及 Peak 等情形下,固定時制、車輛觸動 式、適應模糊控制與適應模糊代理人 等四種方式對於交通路網所造成的延 滯時間。於 5.3.2 節會進一步分析東西 向與南北向車流固定時,上述四種號 誌控制方式對於延滯時間的影響。 5.3.1 控制器於變動車流下的模擬結果 本節將模擬東西向為隨時間變動 車流下,四種控制器相對固定時制延 滯時間的改善率,如表 4。
E-W : 600à800à1000à 1200à 900à 700 veh./hr – Peak
S-N (veh./hr) 400 600 800 1000 Peak vehicle actuated 29.2% 39.0% 24.5% 17.2% 7.3%
adaptive fuzzy 40.2% 37.6% 24.8% 28.1% 21.7%
AF agents 39.6% 42.8% 32.8% 31.9% 20.4%
E-W : 400à 600à 800à 1000à 700à 500 veh./hr – Peak
S-N (veh./hr) 400 600 800 1000 Peak vehicle actuated 31.2% 26.1% 22.0% 34.5% 21.0% adaptive fuzzy 34.3% 30.0% 25.4% 43.4% 28.7% AF agents 37.1% 31.4% 26.5% 45.7% 28.0% CTA LTA2 LTA1 圖 9 雙路口交通路網 表 4 四路口交通路網延滯時間改善率比較表 圖 10 四個路口交通路網 表 3 雙路口路網延滯時間改善率比較表
由表 4 中得知,AF agents 發揮了 MAS 同時協調東西向與南北向號誌的 特性,使得在變動車流 Peak 的情形 下,AF agents 能縮短多數車流狀況的 路網延滯時間。 5.3.2 控制器於固定車流下的模擬結果 此節進一步分析控制器分別在不 同固定車流下的效用,因此將東西向 的車流量固定為 200、400、600、800、 1000 與 1200 veh./hr,依次改變南北向 車流量,於此 36 種車流組合模式下, 比較固定時制、車輛觸動式、適應模 糊控制與 AF agents 等四種不同控制方 式,何者為最佳的控制器。 200 400 600 800 1000 200 400 600 800 1000 1200 E-W (veh./hr) S-N (veh./hr) fixed-time jam 1200 adaptive fuzzy AF agents 從圖 10 中可以明顯看出在 36 個狀 況下,適應模糊代理人的控制對於大 多 數 的 車流 情 形 會 是最 佳 的 控 制 方 式,佔了 22 個狀況,特別是在中等車 流 量 (400-800 veh./hr) 的 情 形 下 , AF agents 的控制方式能有最佳的控制成 效。 六、 結論 相較於一般道路採用固定時制的 控制方式,本論文由單一路口擴充至 多重路口歸納以下結論: 1. 單一路口控制: l 模糊控制的人性化思考方式確實 能做出智慧型的判斷,以改善交 通問題,進而取代交通警察於各 路口手動切換號誌的功能。 l 適應模糊控制針對單一路口時變 的車流狀態為 Light、Heavy 與 Peak 的情形下,節能有 35%以上 的改善率,並使得號誌的切換更 符合駕駛人的需求。 2. 在多重路口的控制上,AF agents 繼承了適應模糊控制於各路口智 慧 型 決 策 的 功 能 , 並 發 揮 multi-agent systems 於各路口間溝 通協調的特性,使得交通路網的延 滯時間大幅改善。 3. 本論文成功由單一路口擴充至多 重 路 口 , 並 於 四 個 路 口 上 建 立 multi-agent systems 的溝通機制。未 來可以此四個路口為基本架構,利 用 MAS 分散式控制的易擴充性, 將路網擴大,而無須重新設計控制 方法。 4. 本研究利用 VISSIM 與 VisVAP 設 計一個完整的交通路網,並實現 multi-agent systems 的溝通機制,以 證實 AF agents 能有效改善多重路 口的交通問題。 七、 成果自評 l 請就研究內容與原計畫相符程度 本研究計畫達成多路口之網 路互連之交通控制,與原訂之目 標相符程度達 95%。 圖 10 四種控制器於固定車流下的比較圖
l 研究成果之學術或應用價值 本研究將多代理人系統,與 模糊控制結合,應用到交通控制 上,並結合網路的應用,確具有 學術與實用之價值。 l 是否適合在學術期刊發表或申請 專利 本研究已在 2006 SICE-ICCAS 會議於釜山發表,未來將投稿至 其他期刊。 l 主要發現或其他有關價值等 本 研 究 成 果 可 取 代 交 通 警 察,並進一步建立互連網之交通 控制。 l 綜合評估 本研究突破過去在交通控制 研究之瓶頸,以模擬驗證所設計 之適應模糊多代理人系統,成功 達成交通網路改善之控制策略。 參考文獻
[1] K.K. Tan, M. Khalid, and R. Yusof, “Intelligent Traffic Lights Control by Fuzzy Logic”, Malaysian Journal of Computer Science, VOL.9, No.2, pp.29-35, 1996.
[2] W. Hong et.el., “A Cooperative Fuzzy Control Method for Traffic Lights”,
Proc. of the 4th International IEEE Conference on Intelligent Transportation Systems, Oakland,
USA, pp. 185-188, 2001.
[3] J. H. Lee and H. Lee-Kwang, “Distributed and Cooperative Fuzzy Controllers for Traffic Intersections Group”, IEEE Trans. Syst., Man,
Cybern., VOL. 29, NO. 2, MAY 1999,
pp. 263-271.
[4] J. Favilla, A. Machion, and F. Gomide, “Fuzzy Traffic Control: Adaptive Strategies”, Proc. of the 2nd IEEE
International Conference on Fuzzy
Systems, San Francisco, USA,
pp.506-511, 1993.
[5] Q. Lin, B. W. Kwan, and L. J. Tung, “Traffic Signal Control using Fuzzy Logic ”, Proc. of 1997 International
IEEE on Systems, Man, and
Cybernetics, Computational
Cybernetics and Simulation, Florida,
USA, pp. 1644-1649, 1997.
[6] F. Y. Wang, “Agent-Based Control for Networked Traffic Management Systems”, IEEE Intelligent Systems, vol. 20, 2005, pp. 92-96.
[7] Z. S. Yang, X. Chen, Y. S. Tang, and J. P. Sun, “Intelligent Cooperation Control of Urban Traffic Network”,
Proc. of the 4th Int. Conf. on Machine Learning and Cybernetics, Guangzhou,
China, pp. 1482-1486, 2005.
[8] VISSIM User Manual-Version 4.00, June 2004
[9] D. Kaur and E. Konga, “Fuzzy Traffic Light Controller”, Proc. of the 37th
Midwest Symposium on Circuits and
Systems, Louisiana, USA,
pp.1507~1510, 1994.
[10] J. France and A. A. Ghorbani, “A Multiagent System for Optimizing Urban Traffic,” Proc. of IEEE/WIC
International Conference Intelligent Agent Technology, Halifax, Canada, pp.
411-414, 2003
[11] J. R. Clymer, “Simulation of a Vehicle Traffic Control Network Using a Fuzzy Classifier System”, Proc. of the
35th Annual, Simulation Symposium,
California, USA, pp.285-291, 2002. [12] R.L. Kelsey, K.R. Bisset, Simulation
of traffic flow and control using fuzzy and conventional methods. In: Jamshidi, M. (Ed.), Fuzzy Logic and Control: Software and Hardware Applications. Prentice-Hall, Englewood Cliffs, NJ, 262-278, 1993.