Volume 12, No.4, December 2007, pp. 403-417
以影像控制區塊解算航攝影像外方位參數實用策略
陳詹閔
1趙鍵哲
2摘要
利用既有圖資為控制資料完成待解算影像的定位工作為一實用的研究課題,藉此可免除或減少外業 測設控制點的工作量。除此之外,以自動化程序讀取控制實體資料庫中存放的相關圖資,除提昇蒐集效 率外,更減少資料整理時人力的浪費,而影像處理技術的引入,使控制資料在像片上的量測工作具備自 動化潛能。本研究利用影像控制區塊做為控制資料,搭配研究發展之匹配策略,以自動化方式量測控制 點,並解算影像外方位參數。基於實用性考量,本研究發展之操作系統具備人機檢核界面與變遷點回饋 機制,控制點量測模組則包含人工量測、半自動量測及全自動匹配供操作選擇,量測方式的彈性調變可 更貼近實務需求。由目前實際資料測試成果顯示,以全自動匹配模式進行解算之影像外方位參數在物空 間定點精度約化至像空間可達次像元(sub-pixel)等級之平面定位精度及 1~2 個像元之高程定位精度,此研 究工作證實以影像控制區塊解算航攝影像外方位參數具備高效能及自動化之能力。關鍵詞:控制實體、影像控制區塊、匹配
1. 前言
傳統航測作業藉由空中三角解算獲取影像外 方位參數,然而近年來逐漸發展之直接定位系統 (Direct Georeferencing),於飛機上裝設全球定位系統 與慣性導航系統(GPS /INS),經由後處理可內插得 拍攝當時曝光站的位置與姿態,可快速獲取影像外 方位參數。Cramer(2001)論及以直接定位模式取代 空中三角完成影像定位工作,但必須在飛行控制非 常精準的情況下才為可行,應用於實務上仍有較大 的限制,故近年來之研究則趨於探討整合空中三角 與直接定位模式,如 Cramer(2003)探討整合模式之 定位精度;Cothren(2005)探討整合模式的可靠度 (Reliability)分析。 因應民生建設需求,圖資生產及更新作業愈益 頻繁,數值化的圖資格式便利於資料庫的建構、保 存及圖資使用,據此,若能有效利用所建構之空間 資訊當成新任務的控制資料來源,代替或減少傳統 空中三角作業以外業量測方式獲取地面控制點之 作業型態,可節省經費與人力投注並縮短作業時 程,除此之外,搭配影像處理技術以及相應的物、 像對應模式,攝影測量解算影像外方位參數之處理 流程可以全自動或半自動的作業模式來進行。 本研究採用影像控制區塊做為以光束法解算 航測影像外方位參數的物空間約制條件,其中待解 算影像之控制點量測工作可藉由自動化匹配完 成。在影像匹配工作考量上,由於影像控制區塊均 具特徵點性質,因此相較於類似任務所採行之一般 區域式匹配方法,如(Jaw and Wu, 2006),本研究加 入特徵點萃取工作,在待解算影像上透過特徵萃取 技術偵測特徵點,並透過檢驗程序以獲取影像控制 區塊於待解算影像上像點匹配。 收到日期:民國 95 年 10 月 02 日 修改日期:民國 96 年 10 月 31 日 接受日期:民國 96 年 11 月 01 日 1國立臺灣大學土木工程學系碩士 2國立臺灣大學土木工程學系助理教授內政部目前正在推行之『高精度及高解析度數 值地形模型後續應用』計畫於 95 年度的施政重點 (內政部施政目標與重點,2006)包含於未來幾年內 完成國內航遙測空標及自然、人工地物特徵點影像 資料蒐集與資料庫建置等工作,因此,本研究工作 之進行為先期測試影像控制區塊資料庫在航攝影 像外方位參數求解的作業效益。基於實用性考量, 除了自動化的作業程序設計之外,本研究發展具備 視覺檢核的人機界面系統,提供給操作員可適時加 入人工干預或即時修正之功能,為利用影像控制區 塊於影像方位求解任務提供一操作簡易、自動化程 度高且具有可靠解算品質的作業環境。
2. 影像控制區塊介紹
利用既有圖資建構之影像控制區塊,除影像灰 階資訊之外,根據其應用目的及範疇必須搭配相應 的屬性資料。若以影像控制區塊作為待解算航測影 像外方位參數解算之控制資料為例,其產製方法及 適宜之資料內容分述如下。2.1 產製來源
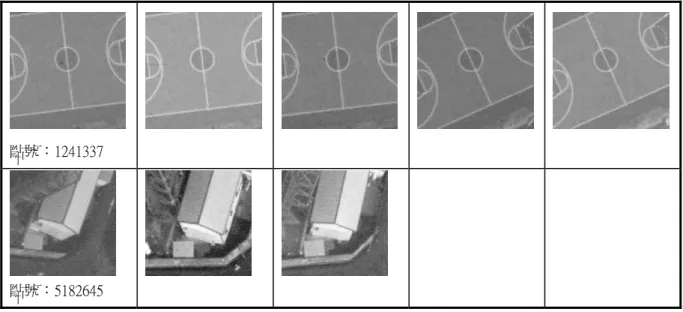
做為控制點,影像控制區塊須紀錄區塊中心點 像元三維座標,影像控制區塊的生產來源除了早期 人孔模板(Drewniok&Rohr,1996)或從數值圖中萃取 之道路交叉點搭配影像資訊建構(Pederson,1996)之 外,尚包括完成空中三角解算之航照影像(邱式 鴻,1994)、以及完成外方位校正之衛照影像。以 目前較常使用的航、衛照影像來源為例,影像控制 區塊可分為佈標點、空中三角測量之影像連結點或 經由人工選取經由至少雙像前交之自然點等產製 方式,不同方式建構之影像控制區塊三維座標獲取 方法及其精度評估如表 2-1 所示。 理論上,所有來自不同影像之共軛特徵點區 塊,可一併建入資料庫中,成為影像控制區塊組, 如表 2-2 之範例所示,包含來自不同攝像角度之影 像控制區塊,能提供比對辨認以及量測上之便利, 實亦有助於自動匹配工作,增加匹配成功率(Jaw and Wu, 2006)。 表 2-1 航、衛照影像控制區塊產製方式分類表(李莉華,2005) 產製方式 佈標點 連結點 自然點 影像控制 區塊範例 特徵點 選取方式 物空間佈標 自動匹配或人工量測 人工選取不易變遷之地 物點 三維座標獲取 地面控制測量 光束法求解 前方交會 三維座標精度 地面控制測量精度 空中三角之連結點精度 前方交會精度表 2-2 影像控制區塊組範例 點號:1241337 點號:5182645
2.2 資料內容
不同產製來源的影像區塊均可建入資料庫中 供後續使用,故擷取自不同影像之共軛區塊,可能 具備不同的拍攝角度、甚至比例尺、影像解析度等 資料性質,為便利於後續使用,影像控制區塊的輔 助資料及幾何資訊應包含以下資訊內容,各項資料 使用目的如下所述: 1.影像控制區塊中心像元之三維坐標 於待解算之影像上比對到與影像控制區塊共 軛之點位後,利用點位影像座標觀測量代入影像控 制區塊所附之物空間三維座標資訊,當作方位解算 之控制點資訊。 2.攝像比例尺及像元解析度 利用攝像比例尺與像元解析度資料,計算影像 控制區塊單一像元對應物空間範圍之大小,並與待 解算影像單一像元對應之地面範圍相比較,可知相 對之比例關係。由於區域式匹配以影像灰階值為觀 測量,故利用此比例關係,並透過約化之處理技 術,即可將匹配之影像資料解析度化為一致,以便 進行灰階匹配工作。 3.影像拍攝時之航線方位角 影像控制區塊來源影像之攝像方位與待解算 影像之攝像方位可能相異,造成兩者之間存在一航 線角度差值,此差異將造成灰階值相互關係不一 致,故以標準化互相關法進行匹配之前必須先加以 改正,改正方法利用影像控制區塊紀錄之航線方位 角,以及待解算影像之近似航線方位資訊,即可計 算角度差值並將影像旋轉為同一航線方位。 4.影像控制區塊之長與寬 影像控制區塊紀錄長、寬資訊,可方便電腦正 確讀取影像輻射資料。 5.拍攝時間 當影像控制區塊描述之區域發生現況變遷 時,該影像控制區塊應於資料庫中淘汰或更新,時 間資訊可作為資料更新之參考依據,並作為評估該 地區是否在短時間經常發生變動之指標。3. 系統設計理念
本章節內容介紹影像控制區塊匹配方法與物 像解算模式所應用之理論,以及探究本研究發展之 匹配策略。3.1 聯合匹配策略
Jaw 以 及 Wu (2006) 利 用 標 準 化 互 相 關 法 (Normalized Cross Correlation, NCC)獲致的匹配點位 做為最小二乘匹配法(Least-Squares Matching, LSM)之近似值進行區域式匹配。然而具有顯著高差移位 之幾何變形區域所產製而成的影像控制區塊,如建 物屋角或屋脊點,為區域式匹配法容易匹配錯誤的 區塊類型,而此種類型的影像控制區塊在產製的過 程中幾乎無法避免,為克服區域式匹配不利於幾何 變形區域之缺點,本研究加入特徵萃取模式,利用 影像處理技術萃取特徵點,並透過灰度值差異之指 標,挑選正確匹配點,以輔助區域式匹配之不足, 提昇自動匹配之成功率。 本研究匹配策略針對具有顯著高差移位之幾 何變形區域的影像控制區塊為改良重點,此類型特 徵點大部份皆為特徵線(如人造建物結構線)之交 會處,故可藉由像片上直線特徵交會點的萃取獲取 匹配候選點,經檢驗而挑選正確匹配點。本研究採 取 Canny 邊緣偵測元取得邊緣線像元,理論上所有 邊緣像元包括非直線邊緣的像元也會被偵測出 來,由於本階段的目標為直線特徵,故利用霍夫轉 換 (Hough Transform) 將 特 徵 像 元 由 影 像 空 間 域 (Image Space Domain)轉換成圖形特徵的參數空間 域(Parameter Space Domain),使轉換前屬於同一直 線特徵之像元轉換後集中於同一參數位置上,再由 參數空間中群集偵測(Cluster detection)的方式找出 直線特徵的參數值,並計算相鄰直線特徵的交點即 為特徵點的候選點,特徵點萃取流程如圖 3-1 所示。
圖 3-1 特徵點萃取流程圖 圖 3-2 直線像元鏈結示意圖 (彭念豪,2005) 然而使用霍夫轉換原理萃取直線,容易因為離 散不連續的直線段具有相同直線參數之特性,造成 線條偵測錯誤,如離散的邊緣像元或者相距很遠的 平行建物邊緣像元,因為剛好位於同ㄧ直線軌跡 上,故偵測成果將視為同ㄧ條直線。為改良上述之 缺點,本研究採用類似區域成長的方式,從直線之 一端開始,鏈結屬於同ㄧ直線的邊緣像元,若鏈結 之線段過於短小則剔除該線段,藉以篩選霍夫轉換 偵測得到之直線。其中線段鏈結的過程考慮實際影 像中複雜環境及雜訊影響,使得原本一條完整直線 中間缺少一兩個像元,故施行直線成長時可設定一 合理門檻值,定義間隔之大小,決定直線鏈結與 否,如圖 3-2 所示。萃取候選特徵點之示意法如圖 3-3 所示,其中自動偵測所得之邊緣線像元(黑色像 元),進行霍夫轉換之直線偵測與篩選後,計算各 擬合直線(紅色直線)參數之交點(黃點),以獲取特 徵點之候選點,再透過後續匹配之檢驗,挑選出正 確匹配點。 間隔小於門檻繼續成長 像元過少,視為雜訊
圖 3-3 特徵候選點萃取示意圖 圖 3-4 聯合匹配策略流程圖 考量匹配策略應盡量能適用於所有影像控制 區塊型態,本研究之匹配策略於區域式匹配中加入 特徵點萃取模式,稱為聯合匹配策略,藉由此模式 改善區域式匹配策略對於具顯著高差移位之幾何 變形區域易匹配錯誤之缺點。工作流程始於以 NCC 法匹配並將相關係數值通過最小門檻值檢驗之最 適匹配點位視為精細匹配之初始位置,並在此點附 近偵測特徵點,將 NCC 匹配點位與特徵點位(可能 一個以上)視為 LSM 初始值並分別進行 LSM 之 後,選取 LSM 收斂解之中灰階差異量最小且合於 位置差異門檻者為最適匹配點,此部份論述細節部 份請參閱(陳詹閔,2006)。本研究工作聯合匹配策 略流程如圖 3-4 所示。須注意的是,對於不屬於直 線交點型式的影像控制區塊,並無對應之影像直線 交點特徵點,匹配成果則由 NCC+LSM (即圖 3-4 左 側流程)程序管控,即使影像中於控制點附近有其 它直線交點產生,將在比對的差異中被汰除。
3.2 非固定式約制(Stochastic
Constraint)平差模型
由於影像控制區塊中心像元對應之地面座標 具有隨機特性,為了得到合理的誤差分析,須按照 約制條件的精度施以非固定式約制平差模式,即將 隨機量視為虛擬觀測量引入平差系統。在光束法平 差作業模式下,本研究將像片觀測量歸類為第一類 觀測量,控制點虛擬觀測量歸類第二類觀測量,外 方位參數虛擬觀測量歸類於第三類觀測量,假設無 其他固定約制條件下,非固定式之高斯馬可夫 (Gauss Markov)平差系統如下: e I I A A l l l l m m r r r m m m n r n r m n r m n ⎥+ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = × × × × × × × × × × + + 3 3 2 1 6 1 6 6 3 3 3 2 12 6 2 11 1 6 3 1 3 2 1 2 1 1 ) 6 3 2 ( 0 0 ξ ξ,
) 0 0 0 0 0 0 , 0 ( ~ 02 1 6 6 3 3 3 2 2 2 1 1 ) 6 3 2 ( − × × × × + + = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Σ Σ Σ P e r r m m n n r m n σ (1) 將式(1)整理為式(2) 1 ) 6 3 2 ( 1 ) 3 6 ( ) 6 3 6 ( ) 6 3 2 ( 1 ) 6 3 2 ( n+ ml+ r× = n+ m+ rA× o+m+ r r+ξm×+ n+ me+ r×,
) , 0 ( ~ ) 6 3 2 ( ) 6 3 2 ( 1 2 0 ) 6 3 2 ( ) 6 3 2 ( 1 ) 6 3 2 (n me r n m r n m r n+m+rP× n+m+ r − + + × + + × + + Σ =σ (2) 其中,l
1為約化後像片觀測量向量;l
2為約化後控 制點虛擬之觀測量向量; 3l
為約化後外方位參數虛擬之觀測量向 量;I
為單位矩陣;n
為像片觀測點點數;m
為地面觀測點點 數;r
為像片數; 11A
、A
12分別為共線式對外方位參數、地 面點座標參數偏微分之係數矩陣; 1ξ
為地面點座標參數增量向量;ξ
2為外方位參數增量向量; 1
Σ
為像片觀測量方差-協方差矩陣;Σ
2為 地面點座標觀測量方差-協方差矩陣;Σ
3 為外方位參數觀測量方差-協方差矩陣; 2 0σ
為先驗單位權方差;P
為權矩陣; 由(3)式迭代計算最小二乘收斂解,由式(4)及式(5) 計算精度: C N 1 ˆ= − ξ,(
N=ATPA,
C=ATPl)
(3) ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ + − + + + − + = 若外方位參數為觀測量 若外方位參數為近似值 ) 3 6 ( ) 6 3 2 ( ~ ~ ) 3 6 ( ) 3 2 ( ~ ~ ˆ2 0 m r r m n e P e m r m n e P e T T σ (4) 1 2 0 ˆ ˆ ˆ = − Σξσ
N(5) 其中,
ξ
ˆ
為未知參數增量向量的估值;σ
ˆ
02為後驗 單位權方差; ξˆˆ
Σ
為後驗參數方差-協方差矩陣。 採用非固定式約制平差模式,除了可合理反映 約制條件的隨機特性外,其解算模式更具備高度彈 性,即使加入的約制條件具有不可變動之限制,利 用此模式只要給定固定約制相對於其他觀測量絕 對高之權值,在數值精度上亦可達到固定約制的效 果。3.3 粗差偵測
為避免錯誤匹配點位嚴重影響方位求解,本研 究引進穩健度估計的概念來偵測粗差,由每次平差 後所得之改正數來進行調權,改正數大者給予較小 的權,仍然保留該觀測量,只是降低該觀測量對求 解的影響量,調權後再次進行平差迭代運算,直到 調權穩定為止。本工作選用之調權方法為丹麥法 (Danish Method),其調權函式如式(6)(Hsu,2004)。 ⎪ ⎩ ⎪ ⎨ ⎧ + − ⋅ ≤ = otherwise c v p c v if p P i i i i i ) 1 exp( σ σ (6) 式中σ
為觀測量先驗標準差,c
為常數,一般 建議設為0
.
7
≤ c
≤
2
,當c
值設定愈小則具有較 佳偵測能力,反之較大c
值設定則需較大改正數才 判定為粗差。4. 實用性策略建置之系統
實用系統必須建置於一個具即時顯圖功能以 及人機對話機制之作業環境,以達到具彈性、可自 動化解算、高效能、高可靠品質以及資料更新回饋 等目標。本研究工作系統運作流程主要分為資料搜 尋、資料處理、影像控制區塊匹配以及外方位參數 解算之步驟,流程如圖 4-1 所示,各項功能內容說 明如下: 1. 資料搜尋 a.)影像控制區塊搜尋:利用參數檔控制待解算 影像的資訊,與控制資料庫建構格式相搭配可自動 搜尋分佈於待解算影像範圍的影像控制區塊,其中 若影像控制區塊資料庫具備地理位相關係之索引 資訊,可更有效率的進行影像控制區塊搜尋工作, 即使必須於包含全台影像控制區塊的龐大資料庫 中進行搜尋也可於短時間完成。以影像基本圖幅資 料為索引之資料庫為例,資料庫將分佈於圖幅範圍 內之影像控制區塊存放於該圖幅編號資料夾中,透 過影像外方位參數近似值,估算待解算影像地面涵 蓋範圍,配合圖幅座標資訊,即可獲取與待解算影 像重疊地面範圍之基本圖圖幅編號,搜尋該圖幅編 號資料夾即可有效率的搜尋分佈於影像上範圍內 之影像控制區塊。如上所述,若影像控制區塊以固 定格式存放於資料庫中,則資料庫搜尋過程完全不 需要人工介入,可節省過去人工整理控制資料耗費 的時間與人力。圖 4-2 描述藉由圖幅資訊當做資料 搜尋之索引,於資料庫中有效率搜尋影像控制區塊 之示意圖,每個方格代表一個圖幅,圖中灰色方格 表示待解算影像包涵的圖幅範圍,故依照圖幅編 號,即可有效率的找出存放在圖幅目錄底下之影像 控制區塊(以點表示)。b.)匹配視窗擷取:控制點的搜尋匹配工作若施 行於整張影像上,則不論以人工量測或自動匹配進 行皆相當困難且費時,本研究利用影像外方位近似 值資訊,計算與影像控制區塊共軛的點位出現於待 解算影像的預測位置,再透過誤差傳播,計算預測 控制點搜尋之範圍,藉此決定搜尋視窗開啟大小, 通常取像點誤差的 2~3 倍擷取匹配視窗,圖 4-3 為 在影像上擷取搜尋視窗的示意圖。 多像同時求解 (非固定式最小二乘 平差) 粗差偵測 全自動模式 輸出影像外方位資訊 (最高精度解算成果) N 結束 共軛點匹配成果 控制區塊 資料庫 航攝影像 外方位參數 近似值\精度 資料庫索引 相關資料 範圍內控制 區塊資料 控制區塊 視窗 匹配視窗 同解析度與同方位角 外方位參數 精度提高 Y N Y 圖 4-1 系統運作流程圖 圖 4-2 圖幅索引搜尋影像控制區塊示意圖 圖幅資料檔紀 錄內容: 圖幅編號及左 上右下對應之 地面座標。 搜尋點: 地面座標反 投影後,像點 落於影像上。
圖 4-3 搜尋視窗擷取示意圖
圖 4-4 影像控制區塊量測流程圖 表 4-1 影像控制區塊方位角改正範例 表 4-2 人機界面-接受自動匹配範例表 2. 資料處理-解析度約化與方位角改正 匹配前必須將目標視窗(影像控制區塊)與搜 尋視窗化為相同影像解析度,作法為將高解析度的 影像視窗進行約化處理,並將影像控制區塊旋轉至 與 待 解 算 影 像 相 同 航 線 方 向 , 即 讓 影 像 同 向 (Alignment),改正角度差異造成視窗灰度關係的錯 誤匹配,其中需注意影像經角度旋轉後為取規則區 塊(矩形或方形),故角度改正後之影像區塊可能會 減少其原有涵蓋範圍,如表 4-1 之範例所示。 3. 影像控制區塊量測與解算功能 本研究可依照使用者的需求,利用參數檔選擇 影像控制區塊量測模式(圖 4-4),分別為(a).人工量 測值為初始值,再以匹配方式決定次像元精度的影 像座標,旨在提昇人工量測點位的座標精度;(b). 自動匹配後即時顯示匹配情況,供人工檢核,若發 現匹配錯誤可直接進行人工修正,保證匹配成果的 品質;(c).全自動匹配模式,此模式則不加入任何 人工干預。以上任一模式之物、像對應資訊完成 後,系統將自動進行多像外方位參數整體解算模 式,使影像外方位解算成果具有較佳一致性。 4. 品質監督功能 自動匹配的成果往往仍需要人類視覺監督以 保證成果之品質,自動匹配完成後即時顯示匹配成 果供操作者檢核為實用性策略中不可或缺的功能 之ㄧ;為提昇系統操作效率,本系統設置人機界 面,供操作者即時檢查匹配成果,如表 4.2 所示; 然而若人工檢核時發現匹配錯誤時,亦可即時修正 特徵點位置。 待解算影像之投影視窗 影像控制區塊 影像控制區塊 點位匹配情況顯示 搜尋視窗大小 投影中心近似位置 影像控制區塊中心像元 地面座標位置 預測像點位置 與誤差 待 匹 配 之 目 標 與 搜 尋 視 窗 A .人 工 量 測 +自 動 匹 配 模 式 B.自 動 匹 配 +人 工 檢 核 模 式 C.全 自 動 匹 配 模 式 自 動 匹 配 自 動 匹 配 共 軛 點 匹 配 成 果 (影 像 控 制 區 塊 量 測 成 果 ) 自 動 匹 配 開 啟 圖 形 介 面 人 工 量 測 開 啟 圖 形 介 面 接 受 匹 配 成 果 人 工 修 正 N Y
5. 變遷資訊回饋資料庫功能 本研究研議之回饋策略可在影像控制區塊匹 配作業中以圖形顯示匹配情況,抑或執行全自動匹 配時附設的自我檢查機制,以視覺或自動偵測的方 式檢查特徵點變遷與否,一但發現點位變遷則給予 變遷訊息,令該點位資訊摒除於後續解算工作中並 且另外存放於變遷資料檔,為資料庫更新之依據, 節省獨立設置更新工作耗費的人力、物力,並提昇 資料庫更新工作的效率。
5. 實驗成果分析
為驗證本研究工作應用之策略與流程設計之 可行性及成效,取用以下兩種實驗例,實驗成果分 析將分為匹配成果、粗差偵測成果以及外方位解算 成果三項目進行探討,詳細實驗成果與分析內容如 下。5.1 實驗資料說明
兩組實驗影像均由台灣世曦工程顧問股份有 限公司(CECI Engineering Consultant Inc., Taiwan, 以 下簡稱 CECI)提供,實驗資料如表 5-1 所示;圖 5-1 顯示影像控制區塊與檢核點分布情況,其中紅色點 為所量測影像控制區塊位置,各影像控制區塊的地 面三維坐標精度等級相當影像控制區塊的地面解 析度;藍色點為檢核點,檢核點資料來源為獨立空 中三角作業中擷取之連結點。 表 5-1 實驗資料配置表 實驗一資料 實驗二資料 實驗配置 實驗影像 影像控制區塊 實驗影像 影像控制區塊 攝 像 比 例 尺 1/17000 1/5000 1/10000 1/10000 掃 描 解 析 度 21μ
m 21μ
m 25μ
m 25μ
m 影像地面解析度 0.34 m/pixel 0.1 m/pixel 0.25 m/pixel 0.25 m/pixel 拍 攝 時 間 2003/12/12 2004/12/11 2002/10/19 2002/07/23 數 量 2 (張) 66 (組) 3 (張) 20 (組) 檢 核 點 數 量 8 (個) 11 (個) 相機型號/率定焦距 RMKTop15/152.818mm LMK-1000/152.280mm 實驗一 (a)像片 13_66 (b)像片 13_67實驗二 2 3 4 5 7 8 2 3 4 5 7 8 9 10 11 12 13 7 8 9 10 11 12 13 (c)像片 4_31 (d)像片 4_32 (e)像片 4_33 圖 5-1 實驗影像控制區塊及檢核點分佈圖
5.2 實驗成果
(1)聯合匹配策略成效 本實驗透過視覺檢核自動匹配之位置,評估本 研究發展之聯合匹配策略自動匹配的之成效,並與 傳統區域式匹配方式加以比較,表 5-2 列出利用傳 統區域式匹配策略匹配錯誤,而聯合匹配策略成功 匹配之實例,作為聯合匹配策略較有利於自動匹配 之佐證。而表 5-3 匹配成果統計資料中亦顯示利用 本研究所發展加入特點萃取之聯合匹配策略,確實 可提升匹配的成功率,並減少匹配錯誤機率發生。 另一個值得注意的是採用聯合匹配策略進行 匹配時,會發生匹配失敗的情況,探討其原因多為 地貌變遷所致,此結果顯示利用聯合匹配策略進行 影像匹配,相較於傳統區域式匹配法,有較高的影 像變遷偵測能力,可視為聯合匹配策略的另一項優 勢,且藉由系統紀錄匹配失敗點位的功能,可將匹 配失敗的點位資訊紀錄於輸出檔,提供為日後資料 庫更新之依據。 表 5-2 自動匹配點位比較範例 影像編號:13_66 傳統區域式匹配 聯合匹配策略 傳統區域式匹配 聯合匹配策略 點號:1352548 點號:9951765 表 5-3 不同匹配策略之成果統計表 傳統區域式匹配策略之成果 本研究聯合匹配策略之匹配成果 影像編 號 控制點 個數 成功 錯誤 失敗 成功率 成功 錯誤 失敗 成功率 13_66 48 37 11 0 78% 44 4 0 92% 13_67 66 43 23 0 65% 60 3 3 91% 4_31 18 13 5 0 72% 18 0 0 100% 4_32 20 17 3 0 85% 20 0 0 100% 4_33 18 13 5 0 72% 16 1 1 88%(2)粗差偵測成效 表 5-4 顯示實驗一匹配錯誤之範例及粗差偵測 後調整影像觀測量權值之情況,此成果顯示本系統 之粗差偵測模式確實可發揮其功效,自動偵測出含 粗差錯誤觀測量,並調降其權值以抑制其影響量。 (3)外方位參數數值及中誤差 實驗一及二之各模式所獲致之外方位參數平 差數值列於表 5-5 及 5-6,其中"CECI 對照組"表 示由 CECI 利用數位攝影測量工作站執行空中三角 所獲致之成果,本工作實驗所獲致外方位參數與 CECI 對照組參數之差異值顯示於表中之括弧內。 (4)定位精度分析 由於經平差計算處理所獲致之影像外方位各 參數之間具高度相關性,單就參數值比較其差異對 解算成果的優劣不易評估,故研究中採用前方交會 檢核點之作業方式,利用所解算之外方位參數進行 前方交會計算之檢核點地面坐標與檢核點已知地 面坐標差值,計算均方根誤差(Root-Mean-Squared Error,RMSE)作為外方位參數品質的評估與定位精 度的指標,成果如表 5-7 所示。 表 5-4 粗差偵測成效檢核表 影像編號:13_66 匹配錯誤點顯 示範例 點號 8371675 9842103 9951765 6581790 2651577 表 5-5 實驗一之外方位參數成果 外方位參數最或是值 模式 影像編
號 X(m) Y(m) Z(m)
w
(Rad)ϕ
(Rad)κ
(Rad) 13-66 180180.83 2512498.18 3094.28 0.01613 0.01638 1.60385 CECI 對照組 13-67 180191.14 2511120.13 3094.68 0.01443 -0.01879 1.58198 13-66 180181.82 (0.99) 2512499.37 (1.19) 3093.93 (-0.35) 0.01578 (-0.00035) 0.01665 (-0.00027) 1.60391 (0.00006) A 13-67 180192.30 (1.16) 2511119.75 (-0.38) 3094.82 (0.14) 0.01458 (0.00015) -0.01852 (0.00027) 1.58202 (0.00004) 13-66 180181.60 (0.77) 2512498.85 (0.67) 3094.25 (-0.03) 0.01591 (-0.00022) 0.01654 (0.00016) 1.60380 (-0.00005) B 13-67 180191.88 (0.74) 2511119.99 (-0.14) 3094.87 (0.19) 0.01451 (0.00008) -0.01865 (0.00014) 1.58205 (0.00007) 13-66 180181.21 (0.38) 2512498.81 (0.63) 3093.96 (-0.32) 0.01596 (-0.00017) 0.01650 (0.00012) 1.60396 (0.00011) C 13-67 180192.96 (1.82) 2511120.06 (-0.07) 3094.60 (-0.08) 0.01450 (0.00007) -0.01830 (0.00049) 1.58201 (0.00003) 註: 模式 A 為人工量測初始值後進行自動匹配模式; 模式 B 為自動匹配後以人工檢核、修正模式; 模式 C 為全自動匹配模式; 括弧內數值為本工作所獲致外方位參數減去 CECI 對照組參數之差值。表 5-6 實驗二之外方位參數成果 外方位參數最或是值
模式 影像編
號 X(m) Y(m) Z(m)
w
(Rad)ϕ
(Rad)κ
(Rad) 4-31 272682.40 2769196.88 1603.57 -0.02467 -0.05024 -2.33274 4-32 272100.01 2768599.38 1603.94 -0.04469 -0.05412 -2.39592 CECI 對照組 4-33 271516.18 2768015.25 1611.18 -0.03009 -0.05878 -2.36786 4-31 272682.76 (0.36) 2769195.08 (-1.80) 1602.59 (-0.98) -0.02338 (0.00129) -0.05013 (0.00011) -2.33295 (-0.00021) 4-32 272099.63 (-0.38) 2768597.19 (-2.19) 1602.11 (-1.83) -0.04309 (0.00160) -0.05424 (-0.00012) -2.39644 (-0.00052) A 4-33 271515.83 (-0.35) 2768012.99 (-2.26) 1608.03 (-3.15) -0.02825 (0.00184) -0.05875 (0.00003) -2.36841 (-0.00055) 4-31 272683.07 (0.67) 2769195.11 (-1.77) 1602.50 (-1.07) -0.02340 (0.00127) -0.04997 (0.00027) -2.33297 (-0.00023) 4-32 272099.40 (-0.61) 2768597.39 (-1.99) 1602.13 (-1.81) -0.04321 (0.00148) -0.05440 (-0.00028) -2.39644 (-0.00052) B 4-33 271516.06 (-.0.12) 2768012.95 (-2.3) 1608.16 (-3.02) -0.02825 (0.00184) -0.05866 (0.00012) -2.36832 (-0.00046) 4-31 272682.62 (0.22) 2769195.39 (-1.49) 1602.52 (-1.05) -0.02355 (0.00112) -0.05013 (0.00011) -2.33299 (-0.00025) 4-32 272099.18 (-0.83) 27685907.20 (-2.18) 1602.10 (-1.84) -0.04310 (0.00159) -0.05445 (-0.00033) -2.39644 (-0.00052) C 4-33 271516.86 (0.68) 2768012.01 (-3.24) 1607.82 (-3.36) -0.02773 (0.00236) -0.05820 (0.00058) -2.36828 (-0.00042) 表 5-7 影像外方位物空間定位成果 模式 實驗一 (單位: pixel m ) 實驗二 (單位: pixel m )模式 RMSEX RMSEY RMSEZ RMSEX-Y RMSEX RMSEY RMSEZ RMSEX-Y
A
60
.
0
204
.
0
23
.
0
079
.
0
71
.
0
243
.
0
63
.
0
219
.
0
06
.
1
266
.
0
09
.
1
273
.
0
26
.
1
315
.
0
52
.
1
381
.
0
B48
.
0
163
.
0
24
.
0
081
.
0
87
.
0
295
.
0
52
.
0
182
.
0
10
.
1
275
.
0
95
.
0
237
.
0
48
.
1
369
.
0
45
.
1
363
.
0
C76
.
0
260
.
0
30
.
0
101
.
0
22
.
1
416
.
0
80
.
0
278
.
0
04
.
1
259
.
0
04
.
1
261
.
0
46
.
1
364
.
0
79
.
1
448
.
0
5.3 實驗分析
1. 由表 5-3 匹配成果統計表得知,傳統區域式 匹配的平均成功率約為 72%,而聯合匹配策略模式 之匹配平均成功率可達 93%,且對地貌變遷的敏感 程度較高,搭配系統紀錄變遷點資訊功能,可提供 為資料庫更新之參考資料,為聯合匹配策略之另一 項優勢。 2. 藉由粗差偵測機制檢核成果得知,自動匹 配錯誤的點位皆可藉由該機制偵測出來並給予較 低的權值,減少對影像方位解算之影響。 3. 從表 5-5 及 5-6 所顯示兩實驗各模式所獲致 之外方位參數值,將之與 CECI 對照組相較發現其 差異量於位置參數上約為公寸至公尺等級,而在姿 態 角 參 數 上 約 為 10−5 ~10−4 ( 實 驗 一 ) 及 3 4 10 ~ 10− − (實驗二)徑度量。若視 CECI 對照組資 料為精度最高者,從上述比較結果來看,實驗一之外方位參數品質約略優於實驗二者(可歸因於實驗 一引用較大比例尺,因此精度等級較高之影像控制 區塊)。然而經詳加比較參數之變化,可觀察其互 有消長之現象。如前曾述及,平差計算所獲致之外 方位參數間具高度相關性,實不易以絕對量來論斷 各模式所獲致外方位參數之品質,既然外方位參數 終究目的為執行物空間定點,變通的方式可從物空 間交會定點精度來進行評估。 4. 考量影像控制區塊於實驗區中數量充足且 均勻分佈的情況下,影響定位精度因素尚包括影像 控制點的精度、類型與品質,以及影像的解析度。 分析表 5-7 定位精度成果得知:實驗一於控制資料 精度高於待解算影像解析度之實驗配置下,可達 8~26cm(0.2~0.8 像元)之平面坐標分量之定位精度 與 24~42cm(0.7~1.2 像元)之高程定位精度,但因為 該實驗使用的影像控制區塊屬於都會區類型並座 落於高度差異大的建物角點,匹配之點位高程值不 穩定造成後續高程定位精度較差之成果(模式 C); 實驗二為控制資料精度與待解算影像解析度一致 的實驗配置情形,受到控制點精度影響,僅達 24~28cm(約 1 個像元)之平面坐標分量定位精度與 32~37cm(1.3~1.5 像元)之高程定位精度,然而因為 本實驗採用的影像控制區塊多屬於農田區類型,非 高度差異大的特徵點型態,故三種匹配模式下之解 算成果相當一致。
6. 結論及建議
6.1 結論
本研究目前發展之匹配演算法與實用策略經 實際資料測試後,依據實驗成果可歸結以下特性: 1. 自動化:以參數檔控制不同待解算影像之 屬性資料,搭配影像控制區塊資料庫儲存、管理方 式,從資料庫搜尋、開啟搜尋視窗、影像解析度及 航向一致性處理、自動匹配到外方位求解,整個運 作流程皆可高度自動化。 2. 彈性:藉由參數的設定讓使用者決定影像 控制區塊於待解算影像上的量測方式,除了全自動 匹配模式外,尚包括人工量測值為初始值進行自動 匹配模式以及自動匹配後即時顯圖供人工檢核、修 正模式,增加系統使用彈性;而解算影像外方位參 數的數學模式採多像同時求解方式,以得到高精度 及高一致性的外方位解算成果,當然若只處理一張 影像,本系統會自動啟動單像後方交會方式求解影 像外方位參數,不受到影像張數的限制。 3. 可靠性:提供即時顯圖與人機界面切換之 功能,讓使用者檢核自動匹配成果之同時,可即時 修正錯誤匹配的影像位置,以保證成果品質。 4. 合理性:由兩次實驗成果證明,利用影像 控制區塊取代地面測量的控制點資訊,成功解算影 像外方位參數;而自動匹配之成效也由實驗中證明 其取代人工量測影像控制區塊之能力,若按照一般 控制點精度比影像解析度高之做法,進行本系統外 方位求解作業,如實驗一的實驗配置情形,可達到 次像元定位精度,證實此作業模式於影像外方位求 解高自動化及高效能發展之可行性。 5. 永續性:系統作業輸出的變遷資料檔可提 供資料庫有效更新與維護,為影像控制區塊資料庫 長久使用的必要助益。6.2 建議與未來展望
影像控制區塊可包含各式地景及多元特徵,因 此相應的匹配工作可考量透過影像處理技術萃取 影像控制區塊上包含之點、線特徵物,發展兼具區 域式與特徵式匹配之策略,提昇點位對應之可靠度 以及精度。另外,隨著高解析度衛星影像以及航照 數位相機拍攝航空像片之發展,將影像控制區塊用 之前述兩種影像而發展之自動定位作業流程實用 策略,為相關的重要研究課題。誌謝
本研究承蒙台灣世曦工程顧問股份有限公司 提供部份研究經費、實驗影像及影像控制區塊以及李莉華工程師對於資料提供所花費的時間及精 力,使工作能順利推展;另外,兩位審查者對本文 所提供的修正意見讓論文內容品質提昇以及增加 嚴謹度,在此一併深深致謝。
參考文獻
內政部施政目標與重點,2006。www.moi.gov.tw/ upload/m_38854_4456944444.doc。 李莉華,2005。航照影像控制實體資料庫建置研發 計畫,中華顧問工程司。 邱式鴻,1994。以影像區塊作為 SPOT 控制點檔之 研究,國立成功大學測量工程研究所碩士論 文。 陳詹閔,2006。以影像控制區塊解算航攝影像外方 位參數實用策略,國立台灣大學土木工程學研 究所碩士論文,台北。 彭念豪,2005。以控制直線進行影像外方位參數求 解之自動化作業,國立台灣大學土木研究所碩 士論文。Cothren, J., 2005. Reliability in Constrained Gauss-Markov Models :An Analytical and Differential Approach with Applications in Photogrammetry, Ph.D. dissertation, Department of Civil and Environmental Engineering and Geodetic Science, The Ohio State University.
Cramer, M., 2001. Performance of GPS/Inertial Solution in Photogrammetry, Proceedings of Photogrammetric Week'01 (D. Fritsch & R. Spiller, editor), Wichmann Verlag, Heidelberg, Germany, pp.49–62.
Cramer, M., 2003. Integrated GPS/inertial and digital aerial triangulation-recent test results, Proceedings of Photogrammetric Week'03 (D. Fritsch, editor), Wichmann Verlag, Heidelberg, Germany, pp.161-172.
Drewniok, C. and K. Rohr, 1996. Automatic Exterior Orientation of Aerial Images in Urban Environments, International Archives of Photogrammetry and Remote Sensing, Vol. 31, B3, pp.146-150.
Hsu, R. S., 2004. Adjustment Treatments of Surveying Measurements, Ch.3, Department of Civil Engineering, National Taiwan University, p.12. Jaw, J. J. and Y. S. Wu, 2006. Control Patches for
Automatic Single Photo Orientation, Photogrammetric Engineering & Remote Sensing, 72(12):151-157.
Pedersen, B. M., 1996. Automated Measurement of Ground Control Objects in Large Scale Aerial Photographs, International Archives of Photogrammetry and Remote Sensing , Vol. 31, pp.633-637.
Strategic Study on the Photo Orientation employing
Control Patches
Chan-Min Chen
1Jen-Jer Jaw
2ABSTRACT
Orienting the photogrammetric imagery by means of existing control entities is one of practical issues which aim to automatically acquire the control information from the database and perform the photo measurements in an attempt to reduce the labor involvement, as well as to promote the working efficiency towards orientation solutions. The author investigates in this study the strategic algorithms where the exterior orientations of the aerial photographic imagery are solved by matching with control patches. The proposed working scheme features itself with the designed platform of the human-machine interface where the measurements of control patches on the imagery can be achieved by through manual, semi-automatic, or fully automatic mode. Furthermore, the disagreements of control patches against the imagery, usually the phenomena of the scene change, are able to be identified and fed back to the system. The experiments show that the positioning quality of oriented imagery performed under the proposed scheme can reach up to sub-pixels and one to two pixels in horizontal and vertical components, respectively, a satisfaction towards orienting the imagery.
Key Words:
Control Entities, Control Patches, Matching
Received Date: Oct. 02, 2006 Revised Date: Oct. 31, 2007 Accepted Date: Nov. 01, 2007
1
Master, Department of Civil Engineering, National Taiwan University
2