2017, 第十八卷第一期, 29-50 2017, 18(1), 29-50
質心和空氣動力中心
周鑑恆
萬能科技大學 航空暨工程學院 chou0717@gmail.com (投稿日期:民國 106 年 06 月 21 日,接受日期:106 年 07 月 11 日) 摘要:運動中物體在運動時發生翻滾或轉動,是由對質心定義的力矩來決定。飛 機飛行時要能夠穩定維持飛行姿勢,而不會隨機翻轉,必須使飛機受到對質心定 義的力矩有助於維持設計要求的飛行姿勢。為了工程(設計、分工、製作)上的 方便,定義了所謂空氣動力中心。但空氣動力中心的意義令許多人感到困惑,本 文融合力學與航空工程,經過推導,詳細解釋何謂空氣動力中心(Aerodynamic Center),也說明空氣動力中心為何有神奇的特性以及如何有利於相關計算,並以 一簡化的航空工程應用(俯仰穩定的氣動布局),示範空氣動力中心的用途。 關鍵詞:質心、空氣動力中心壹、 前言
在航空工程談到飛機之控制和穩定性時,一定會談到質心(或稱重心)、壓力中心(Center of pressure,簡寫為 CP)以及空氣動力中心(Aerodynamic Center,簡稱 AC)【1】。對許多人 而言,也許比較容易了解質心、壓力中心的意義。但空氣動力中心的意義,似乎就比較抽象。 因為空氣動力中心的意義看起來相當古怪,它的特性更令人費解。上網查空氣動力中心(AC) 的意義【2,3,4,5,6】 ,發現國內外都有人感到疑惑,顯然空氣動力中心到底是什麼,是一個普遍的 疑問。 因為不了解空氣動力中心,也就不容易了解飛機設計其『氣動布局』時相關的計算和考 慮,因此造成理解飛機如何保持飛行姿勢的困難。 另一個壞處是,引入了這一個新名詞,而人們對此新名詞又感到陌生,常使人們誤以為 航空工程另有一套原理,而增加學習航空工程相關主題的障礙。事實上,飛行原理當然是力 學的一部分,必須遵守完全相同的牛頓力學。 10.6212/CPE.2017.1801.03同時考慮物理學和航空工程,空氣動力中心的問題一點也不難回答。然而特別值得注意 的是:工程之重點和物理之重點並不相同。工程注重利用各種資源與工具(理論只是工具之 一)完成工作,所以工程之重點常是如何分工合作並加以完成。但是,若能深入了解其物理 原理的來龍去脈,將使得相關學習更加深入,更能靈活掌握工程上的要點,並形成創新改良 的基礎。 本文即融合物理學與航空工程,通盤了解質心和空氣動力中心的意義與應用。
貳、 力矩和多質點系統
其實力矩使物體轉動的公式,並不是力學的基本原理。力矩和物體轉動的關係,源自於 牛頓第二運動定律之簡單數學推導,也就是說,力矩和角動量變化的關係,是牛頓第二定律 的必然結果。就單一質點而言:
根據牛頓第二運動定律,就單一質點而言:a
m
F
(2-1) 再直接作一數學運算,r
為質點的位置向量:)
(
r
m
v
dt
d
dt
v
d
m
r
a
m
r
F
r
(2-2) 再作以下定義:
F
r
(2-3)L
p
r
v
m
r
(2-4) 即可得到:dt
L
d
(2-5) 其中:L
稱為角動量,
稱為力矩。如果物體是由許多質點構成,也就是說物體是有尺 寸的。則必須再經過一些計算,以便得到簡潔的力矩與角動量變化之關係。值得注意的是, 公式中力矩和角動量都要根據同一參考點加以定義。就多質點系統而言:
一般日常生活所用物都有尺寸,而非一個質點。應用描述一個質點運動的牛頓力學於有 尺寸的物體時,可以先將此有尺寸的物體視為一個由許多質點構成的物體,見圖 1。 圖 1:由許多質點以任意方式形成的物體(system) 根據牛頓第二運動定律,系統中某質點運動方程式為: ,(
i i)
n i j ij ext im
v
dt
d
F
F
(2-6) 直接作數學運算,與r
i
作外積,再求總合:)
(
, i i i i n i j ij ext i i iv
m
dt
d
r
F
F
r
(2-7) 先看方程式右側:
i i i i i i i i i i im
v
dt
d
r
v
m
v
v
m
r
dt
d
)
(
(
)
)
(
i i im
v
dt
d
r
(2-8) 再看方程式左側:
n i n z j ij i i ext i iF
r
F
r
)
(
,
i ext i iF
r
)
(
, (2-9)假設系統內各質點相互的作用力平行連心線的方向,而牛頓第三運動定律始終存在:
0
)
(
r
i
r
j
F
ij
0 2 1
i j ij n i n i j n i n i j ij i F r r F r (2-10) 因此可得到:)
(
, i i i n i n i ext i i extr
m
v
dt
d
F
r
i idt
L
d
dt
d
L
(2-11) 其中,角動量之定義如下: i i i i i ir
m
v
r
p
L
;
n i iL
L
(2-12) 力矩的定義如下:
n i ext i i extr
F
,
(2-13)就運動中的物體而言:
如果物體在運動中,原先選定的固定參考點 0 即不方便使用,問題是,新的參考點要定 在何點呢?見圖 2。根據牛頓第二運動定律: 2 2 ,dt
r
d
m
v
m
dt
d
a
m
F
F
i i i i i i n i j ij ext i
(2-14) 圖 2:在新的參考系中,應用牛頓第二運動定律再直接作數學計算,此新的數學計算中,以任意的o點為參考點
)
(
dt
r
d
m
dt
d
r
F
F
r
i i n i i n i j ij ext i n i i
, (2-15) 先看方程式左側:
n i j ij ext i n v iF
F
r
,
n i n j ij j i ext i n i iF
r
r
F
r
(
)
2
1
,
n i i n i ext i iF
r
,
(2-16) 再看方程式右側:
n
i i i idt
r
d
m
dt
d
r
(
)
n i i o i ir
r
dt
d
m
dt
d
r
(
)
n
i i i i n i o i idt
r
d
m
r
dt
r
d
m
r
2 2 2 2
=
2 2 2 2)
(
dt
r
d
m
r
dt
r
d
r
m
i i n i i o n i i i
=
n i i i i o cmdt
r
d
m
r
dt
d
dt
r
d
r
M
2(
)
2
=
n
i i i idt
r
d
m
r
dt
d
)
(
=
n
i i im
v
r
dt
d
)
(
i=
L
i
L
dt
d
dt
d
n i=
(2-17)從以上的計算中可知,如果 2
0
2
dt
r
d
r
M
cm o
,即可得dt
dL
(2-18) 其中:
n i i im
r
)
(
L
i ;
n i ext i iF
r
,
(2-19) i ir
v
為在 OXYZ 慣性座標中量測或觀察到的m
i 相對o
之速度。 在此研究一下,什麼條件下,才會使得下式等於零:
n
i o cm o i idt
r
d
r
M
dt
r
d
r
m
20
2 2 2
(2-20)o
為靜止點,或加速度為零的點,0
2 2
dt
r
d
o (2-21) mr
c
為質心相對o
之位置:
n
i c i ir
m
M
r
m (2-22) 若o
選為物體的質心,則該項即為零,則:0
cmr
(2-23) 特別值得注意的是,v
是在 OXYZ 慣性座標中量測或觀察到的某質點m
i相對o
之速 度。但是v
該用什麼座標表示呢?又該如何表示?如果o
在o
x
y
z
座標中靜止,而z
y
x
o
座標在 OXYZ 沒有任何轉動,則 i ir
v
(2-24)其中
r
i
為o
x
y
z
座標中m
i的位置向量。 從另外一個角度來看 i ir
r
r
0
(2-25) 其中r
i
為o
x
y
z
座標中m
i的位置向量,只有o
x
y
z
在 OXYZ 座標中不轉動(見圖 3) 時, ir
r
r
0
ir
r
r
0 (2-26) 才成立,否則會多出因轉動衍生的修正項。 圖 3:o
x
y
z
座標在 OXYZ 沒有任何轉動 如果物體是剛體,則整羣質點之相對位置即不變,於是可以再簡化角動量的部分。如果 剛體繞著通過o
之轉軸以角速度
轉動,而且剛體具備適當的稱性,以o
為原點定義的角 動量可簡化為繞著該轉軸的轉動慣量,乘上角速度。
r
i
p
i
I
(2-27) i im
r
I
2 (2-28)參、 若干應用
在 David Halliday 普物課本中【7】 有一例題,要解 Yo Yo 球的加速度,就直接利用,對質 心的力矩造成對質心角動量之變化來解題。事實上,因為普通物理教科書中通常沒有深入說 明或尚未提及:對運動中物體質心定義的力矩和對運動中的物體質心定義的角動量變化的關 係,所以此例題使用未說明的理論來解題,有必要加以補充說明。但此題實為一應用對質心 定義力矩的適當例子。 同一教科書中【7】 ,也提出半徑、質量都相同的環、球和碟滾下斜坡的著名例題(見圖 4), 也考慮對質心定義的力矩和對質心定義的角動量。但其實在課本內容中並沒有交代其原理。 根據本文上節推導之原理,方才可以得方程式:
I
R
f
s
(3-1) 因為重力對質心的力矩為零。I
為對通過質心的轉軸定義的轉動慣量,I
是對質心定義的 角動量之變化率,R
為圓形物體之半徑。根據合力造成的質心加速度,可得:
f
ma
mR
mg
sin
s
(3-2) 為方便計算,可改寫為
2sin
Rf
mR
Rmg
s
(3-3) (3-1)式與(3-3)式相加即得: 2sin
mR
I
Rmg
; 2 2 21
s i n
s i n
mR
I
g
mR
I
mg
R
a
(3-4) 由此可知I
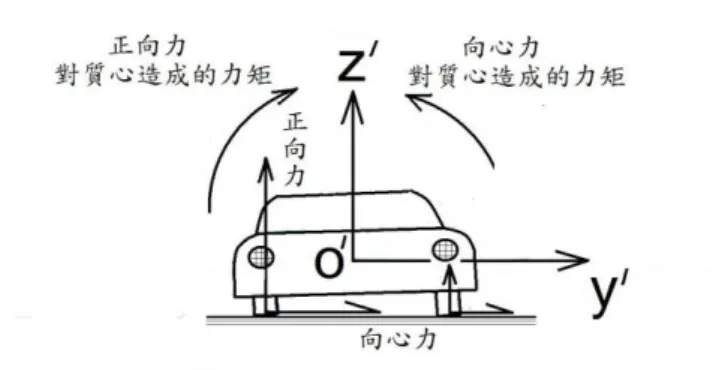
愈大者,加速度愈小,滾得愈慢。 圖 4:半徑、質量都相同的環、球和碟(或圓柱)滾下斜坡百米賽跑選手起跑加速度時,也要維持跑步的正常姿勢而不摔倒。因此所有選手身體都 要向前傾,這是眾所周知的經驗。但一般人多不能正確解釋其原因。其實這現象也可以用對 質心定義的力矩來解釋【8】 。因為人向前加速時,地面施加在腳上向前的力增加,施加在腳垂 直地面的正向力則大致等於體重,而全力加速時腳上所受向前之力相當大。這兩個力對人體 質心造成的力矩相反,而對人體質心的力矩總合必須等於零,人才不會翻倒。因此身體必須 向前傾,加長正向力之力臂長度,而縮短向前之力的力臂長度。後輪驅動的機車,如果猛然 加速,常能使其前輪離地,也是這個原因。 見圖 5,急駛的汽車轉彎時,靠轉彎曲率中心的那側車輛受到地面向上之支撐力會變小, 甚至離地,或造成汽車翻滾。一樣可以用對質心的力矩來解釋。因為轉彎時汽車必然受側向 的向心力(地面作用在輪胎上),汽車如果尚不至於翻滾,姿勢大致不變,角動量沒有變化, 其力矩就必須平衡,於是外側輪胎受地面之支撐力(正向力)增大,內側輪胎受地面的支撐力 變小。 圖 5:如果汽車尚不至於翻滾,姿勢大致不變,角動量沒有變化,其力矩就必須平衡。圖中汽車向右 側轉彎。 澳洲土著有一種打獵的迴旋鏢,原理也是如此,當迴旋鏢一邊向前飛行,一邊旋轉時, 轉到上方的鏢身所受之升力(Lifting force)較大,於是對質心產生一個改變角速度方向的力 矩,此力矩會造成對質心定義的角動量變化,於是迴旋鏢就能夠改變飛行方向而飛回。
見圖 6 滾動中的錢幣不會馬上倒下,也是因為對質心定義的力矩,會造成角動量變化, 於是滾動的錢幣會繞圓圈滾動。
肆、 維持飛行姿態的重要性
羽毛球、飛鏢或是箭,在飛行時都必須使羽毛球頭、飛鏢尖端和箭頭朝向飛行方向,因 此才能發揮其功能。羽毛球球頭向前,羽毛球才能利用羽毛迅速減速,而同時使其飛行軌跡 比較近似簡單的拋物線,羽毛球才能被對手正常回擊,否則就可能被打到球羽而打壞掉。 箭尾的箭羽,受到來自飛行方向的風吹拂而受力,箭羽所受之力對全箭的質心造成的力 矩,會使箭身與飛行方向平行。因為當箭身與飛行方向平行時,箭羽所受之力造成對質心的 力矩才為零。如果箭身與飛行方向不平行,箭羽受力造成對質心的力矩,則會將箭身轉到與 飛行方向平行的方向。就利用這種力矩,保持箭身與飛行方向平行的飛行姿勢,目的在於: ①使空氣阻力減到最小,②箭身受力的情形相當對稱,所以使飛行軌跡較為單純而可預料, 以便精準射擊,③這種飛行姿勢(箭身與飛行方向平行,箭頭向前)飛行時,箭頭擊中物體 時貫穿力最大。伍、 如何維持飛機的飛行姿態
物理原理不能有無故的局限!同樣要利用飛行時各部分受力對飛機質心所造成的力 矩,使得機身參考線與飛行方向維持要設計要求。當飛機飛行姿勢符合設計要求的機身參考 線(FRL)和飛行方向之關係時(即正常的飛行姿勢),全機(包括機翼和機尾)受力對全機質 心造成力矩為零。當機身參考線和飛行方向偏離設計要求時,全機各部受力對質心造成的力 矩,會驅使飛機回到設計的飛行姿勢。 因為必須以設計的飛行姿勢飛行,主機翼才會提供必要的升力。引擎才能正常操作。飛 機與箭不同的是:箭羽簡單安裝在箭尾即可,無須提供箭身升力;但飛機在近質心處設有大 機翼,以提供抵銷重力的升力,所以增加了維持飛行姿勢的複雜性。 本文之討論,忽略機身受力造成的力矩,只考慮主翼及尾翼受力造成的力矩,並且限縮 討論在飛機俯仰(pitch)力矩的範圍。陸、 方便計算的空氣動力中心
問題是如何計算決定飛行姿勢的力矩呢?也就是說,如何計算飛機各部分的受力對飛機 質心所造成力矩呢?本文中作適當簡化,只考慮,如何計算飛機主翼和水平安定翼(尾翼) 之受力對飛機質心造成的俯仰力矩。 在理論上這是一個很簡單的問題。但在實務上顯然不容易,因為知道機翼每一部分受力 的情形並不容易。航空工程中完成此工作的技巧與要求是: ⑴計算過程明瞭、簡潔; ⑵要能分工合作,善用其他分工的成果。例如:研製機翼的龐大工作羣所獲得有關機翼 的許多寶貴數據(例如:升力係數、力矩係數、空氣動力中心等)。 機翼與尾翼的空氣動力中心(Aerodynamic Center)只是為了方便計算外力(主要是主翼 與尾翼所受的力)對全機質心造成的力矩,也方便計算此俯仰力矩隨飛行姿勢俯仰變化而改變的情形。 在本文中為方便起見,暫時只考慮飛行姿勢俯仰(pitch)的改變以及對機身質心定義的 俯仰力矩。以下就看看如何利用空氣動力中心來簡化相關計算。
柒、 空氣動力中心的重要特性
首先假設在機翼的弦(chord)上某處確有空氣動力中心,此空氣動力中心與四分之一弦 長處一點之間的距離為 dac。 見圖 7,先根據力矩的基本定義,直接計算:在r
j(距空氣動力中心)位置的某一小塊 機翼所受之力,對空氣動力中心造成的力矩,再加總機翼表面所有小塊面積之受力對空氣動 力中心造成的力矩。 再利用簡單的數學技巧,將r
j寫成: j ac jd
r
r
(7-1) 就會得到全機翼所有小面積受力對其空氣動力中心造成的力矩,以簡單公式表示如下: j jd
F
r
ac
j j acr
d
F
d
(
)
j j j acd
F
r
d
F
d
4 / c ift ac L d
(7-2) 其中: j j cr
d
F
4 /
(7-3) 寫成純量式 4 / c ift ac acd
L
(7-4) 在航空工程上,為了簡化問題,為了省掉不必要的變數,常以係數做為計算的重點,令 SC v SC q 2 2 1
(7-5)其中:S 為機翼面積,C為機翼弦長,
為空氣密度。 根據各係數的定義,作以下之計算:SC
q
SC
q
d
L
SC
q
c ac ift ac
/4
4 / , ,C
(
)
C
ac c acC
C
d
(7-6) 其中:C
,ac為對空氣動力中心的力矩係數;C
為升力係數;C
,c/4為對機翼 1/4 弦長之點 的力矩係數。 空氣動力中心(Aerodynamic Center)令人難以想像的重要特性是:機翼表面各小區塊所 受之力,對其空氣動力中心(AC)所定義的力矩,不會因為攻角(Angel of attack)改變而改變 (當然,這樣的奇異特性可以簡化後續的計算),即可寫出下式: 0
d dCac (7-7)0
)
(
, /4
d
dC
C
d
d
dC
ac c (7-8) 即可得到 0 0 4 / ,a
m
d
dC
d
dC
C
d
c ac
(7-9) 圖 7:從實驗數據可知空氣動力中心確實存在其中 S C v Lift 2 2 1
(7-10)S
q
L
S
v
L
C
ift ift 0 22
1
(7-11) C 2 1 4 / 2 4 / v Cc S c
(7-12) 實驗上很容易測得C
和C
,c/4,實驗數據(見圖 7a)表明,在一定攻角範圍內,此二 者與攻角成線性關係,因此,此二者之微分,在一定攻角範圍之內為常數(分別為(7-9)式中 之a
0和m
0),也就是說在某攻角範圍內(
mm
mx,參見圖 7a)確實有一個位置固定 的空氣動力中心,而且dC,ac/d
為零,亦即對此空氣動力中心定義的力矩的確和攻角無關。 圖 7a:C
和C
,c/4隨攻角變化的情形捌、 一般飛機的簡易氣動布局
在本節,就以飛機俯仰安定性的氣動布局為例,演示空氣動力中心在計算俯仰力矩時的 重 要 性 和 方 便 性 。 當 然 所 有 的 討 論 都 限 制 在 機 翼 不 致 於 失 速 的 角 度 範 圍 內 (
mm
mx)。如果飛行時飛行姿勢已經非常離譜,就難以改出。 如何讓飛機依設計的飛行姿勢飛行?總的來說,就是使得以設計的姿勢飛行時,全機各 部分(本文只考慮主機翼和尾翼)對全機質心造成的俯仰力矩必須為零。當飛行姿勢與設計 之姿勢不同時,機翼和機尾所受力對質心造成的力矩,會將飛機改回設計的姿勢。從策略上而言,為了達到飛機飛行時姿勢的穩定平衡,有各種不同的設計策略,以下的 設計策略最為簡單: ①在飛機以設計要求的姿勢飛行時(參見圖 8,
0
),先讓主翼承受飛機(含尾翼)的全 部重量,直接達到飛航時所需的力平衡;並且使主翼的升力對全機質心(含尾翼質量)定 義的力矩為零,而達到力矩平衡。(當然,阻力由推力抵銷,阻力的合力與推力的合力都 通過質心,都不對質心造成力矩。) ②再考慮尾翼。在設定的飛行姿勢(
0
)時,完全不提供升力,因此不受升力的尾翼對 全機質心造成的力矩也為零。 ③以上兩項設計使得全機已經達到力平衡和力矩平衡。尾翼的功能主要在提供穩定性,亦即 尾翼有助於,在飛行姿勢偏離設計要求時自動改回原定的姿勢。 圖 8 所示為全機氣動布局概要。其中cm
為全機之質心,AC為主翼和水平安定翼(尾翼) 之空氣動力中心。
角為機身參考線(FRL)和飛行方向之夾角。主翼受到的氣流速度為v
, 尾翼受到的氣流速度為v
(略向下偏
d 角度);i
w、i
t 分別為主翼與尾翼的安裝角。
w、 t
分別為主翼和尾翼之空氣動力中心與質心之間的距離。
w、
t分別是主翼和尾翼的氣 流攻角,可以公式表示如下:
i
(8-1) d t ti
(8-2) 圖 8:飛機設計時的幾個要點(一)主翼提供全飛機的力平衡和力矩平衡
主翼提供全機力平衡和力矩平衡。因此全機重量要等於主翼的升力,亦即 wing L wing wingv
S
C
L
W
2 ,2
1
(8-3)W
為全機重量,L
wing為主翼升力,v2為氣流相對飛機及主翼的速度,S
wing為機翼面積。 wing LC
, 為主翼的升力係數,可得 wing wing LS
v
W
C
,2
2
(8-4) 已知此升力係數之後,再找出對應此升力係數的氣流攻角,進而決定安裝角。 根據實驗(參見圖 10),升力係數和氣流攻角
w
i
w的關係如下:]
[
0, , ,,wing L wing wing w
L
C
i
C
(8-5) 其中,C
L,,wing為升力係數在某範圍之內的斜率(因為在此範圍內,升力係數和攻角成正比, 故斜率為常數),
0,wing為升力係數為零時之攻角。
i
w為氣流之攻角。 飛行姿勢設計在
0的情形]
[
0, ,,wing L wing wing w
L
C
i
C
(8-6) wing wing L wing L wC
C
i
0, , , ,
(8-7) 由飛機重量(W),水平速度v
和主翼面積S
wing,決定C
L,wing;而C
L,,wing(斜率
)
,
0,wing (升力為零的攻角值)則為主翼的性能,已經確定。於是就決定了主翼的安裝角(i
w)。 其次,考慮主翼的力矩平衡,參見圖 9,先根據主翼對飛機質心造成的力矩之原始定義F
d
r
cm
(
r
)
d
F
d
F
r
d
F
d
F
ac,wing wing ac wingL
,
(8-8) 換成純量式,須考慮方向。使飛機機頭下俯方向之力矩為負,使飛機機頭上仰方向之力矩為 正。就大多一般機翼而言:0
,wing
ac
(8-9)但
0時,
cm必須為零(參見圖 8),亦即,0
, cm
L
wing
acwing
(8-10) 其中
cm為主翼對全機質心造成的力矩,
為全機質心與主翼空氣動力中心的距離,由此可 見利用空氣動力中心可以方便計算,因C
ac,wing為定值, wing L wing wing ac wing wing wing wing acC
S
v
C
C
S
v
L
, 2 , 2 ,2
1
2
1
0
, ,
acwing wing L wingC
C
C
(8-11) 其中;S
wing為主翼面積,C
wing為主翼平均弦長。 圖 9:使用機翼空氣動力中心(AC),可以大幅簡化機翼對全機質心(cm)造成的力矩之計算(二)在設定的飛行姿勢(
0
)時,尾翼不再提供升力與力矩。
在設定的飛行姿勢(
0
)時,設定尾翼完全不提供升力,因此升力為零的尾翼對全 機質心造成的力矩也為零。 尾翼之翼形剖面(Airfoil),通常其弦線(Chord)上下的曲面是對稱的。因此尾翼所受 之升力與其攻角(Angle of attack)成正比,也就是說:攻角為零時,尾翼所受之升力為零; 攻角為正時,升力即為正值;攻角為負時,升力即為負值,參見圖 10(右)。因此尾翼的升 力可以寫成:tail L tail tail
v
S
C
L
2 ,2
1
(8-12) 而其升力係數直接可表示為(參見圖 10): t tail L tail LC
C
,
,,
(8-13) t
為尾翼與氣流的夾角,亦即尾翼的攻角;C
L,,tail為常數,亦即尾翼升力係數對其攻角的 斜率。S
tail為尾翼面積,
為空氣密度,而v
是空氣相對尾翼的速度。值得注意的是,v
和v
不同,因為尾翼受到的氣流,先受到主翼導流的影響,方向已經略為偏向下方,大小也略有 變化。 見圖 11,因為主翼導流的影響,而使流到尾翼的氣流方偏向下方的角度為:
d d d 0 (8-14) 其中
為機身參考線與v
的夾角。
d0是
為零時氣流向下偏的角度。
d/
是
d隨
改 變的比例係數,近乎常數。 因為
0時,主翼已經提供了全機的力平衡和力矩平衡。所以只要尾翼的安裝角度i
t等 於
d0,即 0 d ti
(8-15) 則尾翼的氣流攻角為
t即為零,尾翼即沒有升力,同時也不產生對全機質心的力矩。 到此,主翼和尾翼共同提供了飛機飛行『平衡』所需的力和力矩。(三)水平尾翼也稱水平安定翼,對維持飛機俯仰穩定十分重要。
尾翼的真正功能在於幫助維持飛機飛行時姿勢的『穩定』。這穩定性就決定於:尾翼和 主翼對飛機質心產生的力矩隨
如何變化。此力矩可以表示如下。(參見圖 8 與圖 9) t tail tail ac wing wing ac
L
L
, , cm
(8-16) 其中
ac,tail為;尾翼各小面積所受之力對尾翼的空氣動力中心造成的力矩(參見圖 7)。因為尾翼為上下面對稱的翼形剖面,所以當尾翼的攻角為零時,
ac,tail必然為零;又因為
ac,tail不 隨攻角變化而變化,是一常數,故不同攻角的
ac,tail 0。為了利用已有的大量係數資料,將(8-16)式左右側同時除以 wing wing wing wing
C
v
S
C
S
q
0 22
1
(8-17) 其中S
wing為主翼面積,C
wing為主翼平均弦長,即可得: tail L wing t wing tail t wing L wing aC
C
S
S
C
C
C
C
,cm
, c,wing
,
, (8-18) 其中:根據空氣動力中心的奇異特性t
cons
C
,ac,wing
tan
(8-19) 尾翼氣流速度和主翼氣流速度其實差不太多,其比值為: 2 2
v
v
t
(8-20) 也近乎常數。 機翼和尾翼的升力係數都和氣流之攻角有關,參見圖 10,注意升力係數與
以及
t的 函數關係。 參見圖 11,根據(8-14)式可分別求出主翼及尾翼的氣流攻角:
i
(8-21) d t t
i
d d ti
0
d d ti
01
(8-22) 代入(8-18)式中,即可得到對質心的俯仰力矩隨
角度變化的情形。
(
1
)
)
(
, , , , c , d tail L wing t wing tail t wing wing L aC
C
S
S
C
C
C
(8-23)因為
0
,故方程右側第一項大於零,因此只要
t(即尾翼空氣動力中心距全機質心 之距離)夠大,就能使C
,ac(
)
和
近乎成正比,但斜率為負。也就是說:當
變正(機頭 上仰時),對主翼與尾翼所受之力對質心造成的力矩會是負值,使機頭下壓。當
小於零, 機頭下俯時,主翼與尾翼所受之力對質心造成的力矩就大於零,使機頭抬升。而使飛機維持 在
0的姿勢穩定飛行。 圖 10:主翼(左)和尾翼(右)的升力係數 圖 11:主翼和尾翼氣流攻角的示意圖玖、 結語
航空工程是一門相當吸引人的科技,在網路和坊間的圖書中常有大量討論,但限於一般 民眾的背景能力,許多普遍疑問常莫衷一是,妨礙更深入的了解。而工程的重點在於實際完 成,因此對於絕對可靠的公式,常即不再多說其理論源由,但許多人還是希望了解理論的來 龍去脈。 本文融合物理學中的力學和航空工程中飛機氣動布局的相關主題,從最基本的牛頓定律 出發,回答了下列問題:⑴為什麼飛機飛行姿勢之穩定與平衡,要考慮氣動布局對飛機質心 造成的力矩。⑵空氣動力中心是什麼。⑶為什麼空氣動力中心具有如此好用的特性,亦即機 翼各部分所受之力對機翼空氣動力中心造成的力矩,居然不隨攻角改變而改變。⑷空氣動力中心用於計算對全機質心造成的力矩時,可簡化計算,有其方便之處。⑸以設計民航機氣動 布局的簡化例子,說明空氣動力中心的用途。 就物理教育而言,透過空氣動力中心之相關計算,分析氣動布局與俯仰平衡與穩定的關 係,是力學中力矩理論深具實際應用價值的例子。
致謝
感謝馬德明教授與宛同教授指正。參考文獻
1. David Halliday, R. Resnick and J. Walker, Fundamentals of Physics 6th ed., John Wiley &Sons, Inc. 2001, page 249.
2. https://en.wikipedia.org/wiki/Aerodynamic_center 3. https://www.grc.nasa.gov/www/k-12/airplane/ac.html 4. https://www.youtube.com/watch?v=N8KQNfUQljk 5. https://www.youtube.com/watch?v=P_0R0eWOKns
6. M. J. Thompson. "A Simple Method for Determining the Aerodynamic Center of an Airfoil", Journal of the Aeronautical Sciences, Vol. 5, No. 4 (1938), pp. 138-140.
7. John D. Anderson, Jr., Introduction to Flight 8th ed., Mc Graw Hill education, 2016. New York. 8. 周鑑恆,力矩平衡探密,科學月刊,2010 年 9 月號。
The Center of Mass and the Aerodynamic Center
Chien-Heng Chou
College of Aviation and Engineering, Vanung University chou0717@gmail.com
Abstract
Whether or not a moving body will rotate or roll depends on what the torque about the center of mass of the body is. Similarly, a suitable torque about the center of mass of an airplane is necessary to maintain the designed flying posture of the airplane. In order to take the advantage of division of labor, the so-called aerodynamic center is defined and used for designing and
analyzing an airplane which can fly safely. But the meaning of the aerodynamic center makes so many people and learners confused. In this paper, a related derivation for the aerodynamic center is carried out based on mechanics and aviation engineering. A detailed explanation of why the aerodynamic center has magical characteristics is proposed. How the aerodynamics center is useful for facilitating related calculations for designing an airplane is also discussed. We demonstrate the usage of aerodynamic centers with a simplified aeronautical engineering application. By using the aerodynamic center, we analyze how aerodynamic layout of airplane influences its pitching stability.