A note on optimal communication spanning trees
Bang Ye Wu Kun–Mao Chao
April 1, 2004
The optimal communication spanning tree (OCT) problem is defined as follows. Let G = (V, E, w) be an undirected graph with nonnegative edge length function w. We are also given the requirements λ(u, v) for each pair of vertices. For any spanning tree T of G, the communication cost between two vertices is defined to be the requirement multiplied by the path length of the two vertices on T , and the communication cost of T is the total communication cost summed over all pairs of vertices. Our goal is to construct a spanning tree with minimum communication cost. That is, we want to find a spanning tree T such thatPu,v∈V λ(u, v)dT(u, v) is minimized.
The requirements in the OCT problem are arbitrary nonnegative values. By restricting the requirements, several special cases of the problem were defined in the literature. We list the problems in the following, in which r : V → Z0+ is a given vertex weight function and S ⊂ V is a set of k vertices given as sources.
• λ(u, v) = 1 for each u, v ∈ V : This version is the Minimum Routing Cost Spanning Tree
(MRCT) problem discussed in the previous chapter.
• λ(u, v) = r(u)r(v) for each u, v ∈ V : This version is called the Optimal
Product-Requirement Communication Spanning Tree (PROCT) problem.
• λ(u, v) = r(u)+r(v) for each u, v ∈ V : This version is called the Optimal Sum-Requirement
Communication Spanning Tree (SROCT) problem.
• λ(u, v) = 0 if u /∈ S: This version is called the p-Source OCT (p-OCT) problem. In other
words, the goal is to find a spanning tree minimizingPu∈SPv∈V λ(u, v)dT(u, v).
• λ(u, v) = 1 if u ∈ S, and λ(u, v) = 0 otherwise: This version is called the p-Source
MRCT (p-MRCT) problem. In other words, the goal is to find a spanning tree minimiz-ingPu∈SPv∈V dT(u, v).
We define two communication costs and notations for the PROCT and the SROCT problems. Definition 1: The product-requirement communication (or p.r.c. in abbreviation) cost of a tree
T is defined by Cp(T ) =Pu,vr(u)r(v)dT(u, v).
When there are more than one vertex weight functions, we shall use Cp(T, r) to indicate that the
cost is with respect to weight r.
Definition 2: The sum-requirement communication (or s.r.c. in abbreviation) cost of a tree T is defined by Cs(T ) =Pu,v(r(u) + r(v))dT(u, v).
Given a graph G, the PROCT (or SROCT) problem asks for a spanning tree T of G such that
Cp(T ) (or Cs(T ) respectively) is minimum among all possible spanning trees.
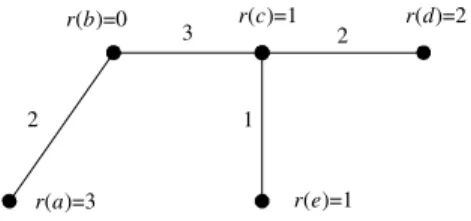
1 2 3 2 r(a)=3 r(b)=0 r(c)=1 r(d)=2 r(e)=1
Figure 1: The product-requirement communication cost between vertices a and d is 3 × 2 × (2 + 3 + 2) = 42, and the sum-requirement communication cost between vertices a and e is (3 + 1) × (2 + 3 + 1) = 24.
more general p-source MRCT, arbitrary p
2-source MRCT Optimal Communication Spanning Trees
SROCT PROCT
MRCT p-source MRCT, fixed p
2-source OCT p-source OCT, fixed p
Figure 2: The relationship of the OCT problems.
Example 1: The p.r.c. cost and s.r.c. cost between a pair of vertices are illustrated in Figure 1. The cost of the tree is the sum of the cost for all pairs of vertices.
The relationship of the different versions of the OCT problems is illustrated in Figure 2. Note that there are variants for the multi-source problems. By “arbitrary p,” we mean there is no restriction on the number of sources in the input data, while by “fixed p,” the number of sources is always equal to the constant p.
Table 1 summarizes the results.
Bibliographic Notes and Further Reading
The current best approximation ratio for the general OCT problem is due to Yair Bartal’s algorithms which approximate arbitrary metrics by tree metrics. He first presented a randomized algorithm [1] and then derandomized it to a deterministic algorithm [2]. Its application to approximating the OCT problem was pointed out in [10].
The PROCT and SROCT problems were introduced in [8]. In that paper, Bang Ye Wu, Kun-Mao Chao, and Chuan Yi Tang gave a 1.577-approximation algorithm for the PROCT problem and a 2-approximation algorithm for the SROCT problem. The PTAS using the Scaling-and-Rounding technique for a PROCT problem was presented in [9] by the same authors. Scaling the input instances is a technique that has been used to balance the running time and the approximation ratio. For example, Oscar H. Ibarra and Chul E. Kim used the scaling technique to develop a
Table 1: The objectives and currently best ratios of the OCT problems.
Problem Objective Ratio
OCT Pu,vλ(u, v)dT(u, v) O(log n log log n)
PROCT Pu,vr(u)r(v)dT(u, v) PTAS
SROCT Pu,v(r(u) + r(v))dT(u, v) 2
MRCT Pu,vdT(u, v) PTAS
p-MRCT Pu∈SPv∈V dT(u, v) 2
2-MRCT Pv(dT(s1, v) + dT(s2, v)) PTAS
fully polynomial time approximation scheme (FPTAS) for the knapsack problem [5], and some
improvement was made by Eugene L. Lawler [6]. A nice explanation of the technique can also be found in [4](pp. 134–137).
The NP-hardness of the 2-MRCT was shown by Bang Ye Wu [7], in which the reduction is from the Exact Cover By 3-Sets (X3C) problem ([SP2] in [4]). The transformation is simpler and easier to extend to the weighted case, which is designed to show the NP-hardness of the p-MRCT problem for any fixed p. A similar reduction (for 2-MRCT) was also shown by Harold Connamacher and Andrzej Proskurowski [3]. They showed that the 2-MRCT problem is NP-hard. The PTAS for the 2-MRCT problem also appeared in [7]. In addition to the PTAS for the 2-MRCT problem, there is also a PTAS for the weighted 2-MRCT problem. But the PTAS works only for metric inputs and the counterpart on general graphs was left as an open problem.
References
[1] Y. Bartal. Probabilistic approximation of metric spaces and its algorithmic applications. In
Proceedings of the 37th Annual IEEE Symposium on Foundations of Computer Science, pages
184–193, 1996.
[2] Y. Bartal. On approximating arbitrary metrics by tree metrics. In Proceedings of the 30th
Annual ACM Symposium on Theory of Computing, pages 161–168, 1998.
[3] H.S. Connamacher and A. Proskurowski. The complexity of minimizing certain cost metrics for k-source spanning trees. Discrete Appl. Math., 131:113–127, 2003.
[4] M.R. Garey and D.S. Johnson. Computers and Intractability: A Guide to the Theory of
NP-Completeness. W.H. Freeman and Company, San Francisco, 1979.
[5] O.H. Ibarra and C.E. Kim. Fast approximation algorithms for the knapsack and sum of subset problems. J. ACM, 22:463–468, 1975.
[6] E.L. Lawler. Fast approximation algorithms for knapsack problems. Math. Oper. Res., 4(4):339–356, 1979.
[7] B.Y. Wu. A polynomial time approximation scheme for the two-source minimum routing cost spanning trees. J. Algorithms, 44:359–378, 2002.
[8] B.Y. Wu, K.-M. Chao, and C.Y. Tang. Approximation algorithms for some optimum commu-nication spanning tree problems. Discrete Appl. Math., 102:245–266, 2000.
[9] B.Y. Wu, K.-M. Chao, and C.Y. Tang. A polynomial time approximation scheme for optimal product-requirement communication spanning trees. J. Algorithms, 36:182–204, 2000.
[10] B.Y. Wu, G. Lancia, V. Bafna, K.-M. Chao, R. Ravi, and C.Y. Tang. A polynomial time approximation scheme for minimum routing cost spanning trees. SIAM J. Comput., 29:761– 778, 2000.