行政院國家科學委員會專題研究計畫 期中進度報告
串接次系統設計及其在通訊與訊號處理應用之研究(1/2)
計畫類別: 個別型計畫
計畫編號: NSC94-2213-E-009-061-
執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日
執行單位: 國立交通大學電機與控制工程學系(所)
計畫主持人: 鄭木火
報告類型: 精簡報告
報告附件: 出席國際會議研究心得報告及發表論文
處理方式: 本計畫可公開查詢
中 華 民 國 95 年 5 月 29 日
中文摘要
(關鍵詞: 串接次系統、 全球衛星定位系統、 頻率獲得) 本期中報告目的是說明及檢討本計畫執行之結果。 本計畫目的是探討建立一串接次系統聯合設計 方法及其在通訊系 統與訊號處理的應用。 本計畫執行已近一年, 其成果之一是我們提出使用此觀念及方法來 設計全球衛星定位系統 (GPS) 杜普勒頻率之獲得。 我們將傳統的快速傅利葉 (FFT) 與鳥啾轉換結合, 如此產生一在杜普勒頻率的獲得有更快速, 資料 更少, 且解析更高的方法。 其設計方法與推導過程是本報告的主要內容。Abstract
Keywords: Cascaded Subsystems, Global Positioning System, Frequency Acquisition
The purpose of this report is to report and discuss the progress of the project. This project aims to develop algorithms for the design of cascaded subsystems and its applications to the communications and signal processing. This project has been executed for one year. One accomplishment we have achieved from this project is that we have applied this approach to design algorithms for the acquisition of Doppler frequency in global positioning system (GPS). We combine the traditional approach of using fast Fourier transform (FFT) and the chirped transform algorithm (CTA) to successfully estimate the Doppler fre-quency. This approach, compared with the traditional algorithm, yields a faster algorithm with a higher resolution. The design approach and derivation constitutes the main content of this report.
一: 報告內容: 使用CTA 之 GPS 頻率獲得, A Frequency Acquisition Technique
Using Chirp Transform Algorithm for GPS Receivers
abstract
The chirp transform algorithm, which can compute the Fourier transform of data in any set of equally spaced samples on the unit circle, is used for the frequency acquisition in GPS receivers. This approach, compared with the fast Fourier transform approach, is more flexible in setting the frequency resolution and requires lower realization complexity for a fixed resolution.
1.1
Introduction
The signal acquisition in global positioning system (GPS) receivers is a coarse synchronization process for estimation of the pseudo random number (PRN) code delay and the Doppler frequency; these estimates are then used as the initial values for further tracking. Since the signal acquisition is the most time-critical and computation intensive step in GPS receivers, recently several techniques using FFT have been developed for either the acquisition of the Doppler frequency [1, 2, 3] or the acquisition of the PRN code delay [4, 5] such that the realization complexity can be reduced. This letter focuses on the realization for the acquisition of the Doppler frequency. We observe that if one desires to estimate the Doppler frequency with a finer resolution, the approaches via the FFT still require a large number of received data and thus demand high realization complexity. This disadvantage arises because the FFT evaluates the Fourier transform of data at uniformly spaced samples of the whole unit circle, but the interested and possible Doppler frequencies are within only a small frequency band. Therefore, this paper uses the CTA to overcome this drawback by exploiting the property that the CTA can compute the data spectra only within a specified frequency band with a designed resolution. This approach, compared with the FFT approach, is more flexible in setting the frequency resolution and requires lower realization complexity for a fixed resolution.
1.2
Signal model and maximum likelihood estimation:
Let the received GPS signals for standard positioning service via the receiver antenna have been down-converted to a digitized baseband signal which is given by the following equation,
r(n) = AP (nTs− τ )ej(ωb+wd)n+ v(n), (1.1)
where A denotes the amplitude, Ts the sampling period, P (·) the ±1-valued coarse acquisition (C/A)
code function, τ the code delay with respect to the GPS system time, ωb and wd denote respectively the
digital baseband offset and Doppler radian frequencies, and v(n) represents the noise. The digital offset frequency ωb is commonly known and is caused by the mismatch between the signal carrier frequency and
the frequency of the local oscillator. Note that the signal model adopted here neglects the code delay arising because of the Doppler effect; besides, the effect of navigation data, as commonly done, is also neglected because its period is usually much longer than the duration of the available data samples. The technique of the maximum likelihood estimation is commonly employed to estimate the code delay and the Doppler frequency from the received data. The likelihood function, assuming the white Gaussian noise v(n), has been derived in [6, 7], given by
L(m, ˆω) = 1 N0 | N −1X n=0 r(n)p(n + m) exp(−j ˆωn)|2 (1.2)
function (1.2) is maximized. Notice that the obtained m means that the code delay estimate equals mTs
and the frequency ˆω represents the estimate of the sum of the baseband offset frequency ωb and the Doppler
frequency ωd. Since only the frequency acquisition is concerned here, we assume that the code delay m
has been obtained, the problem remains to estimate the frequency ˆω to maximize the likelihood function in (1.2).
1.3
FFT approach
Setting ˆω = 2πk/N in (1.2) with k = 0, . . . , N − 1, we observe that the FFT can be used for com-puting the summation term within the absolute function in (1.2) so that the computational complexity can be significantly reduced. Thus, the acquisition process first uses the FFT for computing Y (k) = PN −1
n=0 r(n)p(n + m) exp(−jnk/N ) for k = 0, . . . , N − 1, then finds the index k in which |Y (k)| is the
maximum; the frequency corresponding to this index is the obtained estimate; that is, ˆω = k/(N Ts). The
frequency resolution of this approach clearly equals 1/(N Ts); hence, if a finer frequency resolution is
de-sired, then the required N and the realization complexity should be increased. For instance, if the desired frequency resolution is 100 Hz with the sampling frequency 3 MHz, then N should be no less than 30000; the FFT of this length demands heavy computation load and a large size of memory.
1.4
CTA approach
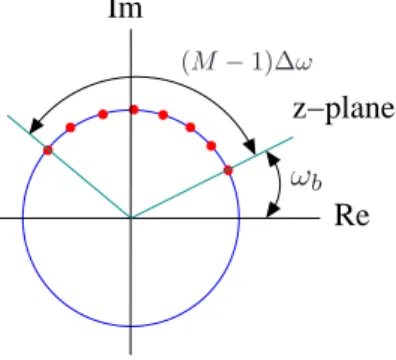
The FFT approach is inefficient because it computes the data spectra with its frequencies around the whole unit circle but the interested Doppler frequency varies only within a small band. For instance, the Doppler frequency of the GPS signal varies at most from -10 kHz to 10 kHz. Hence, we use the CTA [8] to overcome this drawback. Let the desired resolution be ∆ω and the bandwidth of the Doppler frequency variation is no more than (M − 1)∆ω, as shown in Fig. 1.1. Then the CTA evaluates the Fourier transform of data at only M frequencies, denoted by ωk= ωb+ k∆ω for k = 0, . . . , M − 1 by the following equation,
Y (ejωk) = N −1X n=0 r(n)p(n + m)e−jnωk = Wk2/2 N −1X n=0 r(n)p(n + m)e−jωbnWn2/2W−(k−n)2/2 = Wk2/2 N −1X n=0 y(n)h(k − n) (1.3)
where W = e−j∆ω, y(n) = r(n)p(n + m)e−jωbnWn2/2, and h(n) = W−n2/2, for −(N − 1) ≤ n ≤ M − 1,
otherwise h(n) = 0. Notice that the summation in (1.3) is just the linear convolution of y(n) and h(n) which can be realized by using the FFT for reducing the computation complexity. The FFT length is chosen to be L = M + N − 1 so that the circular convolution can equal the linear convolution for 0 ≤ k ≤ M − 1. The block diagram to realize the CTA via FFT is depicted in Fig. 1.2. The detailed operation of each step is given as follows: (1) Padding M − 1 zeros after y(n) yields y0(n) which is of length L. (2) Delaying h(n)
by N − 1 yields h0(n), that is h0(n) = h(n − (N − 1)), so that h0(n) is causal. (3) Taking FFTs of y0(n)
and h0(n) yields Y0(l) and H0(l) respectively for l = 0, . . . , L − 1. (4) Multiplying together Y0(l) and H0(l)
and taking IFFT of Y0(l)H0(l) results in z(n). (5) Extracting the last M data of z(n) yields z0(k), then
multiplying z0(k) by Wk2/2
for k = 0, . . . , M − 1, we obtain Y (ejωk). One can find that the CTA is flexible
to design the frequency resolution; moreover as the frequency resolution increases, we can increase M only but keep N unchanged. This advantage thus can be taken to lower the realization complexity in frequency acquisition especially when a fine frequency resolution is required.
Re Im
z−plane
ωb
(M − 1)∆ω
Figure 1.1: The frequency samples for CTA
1.5
Realization complexity and computer simulation
The realization complexities of the FFT and CTA approaches are first discussed. For simplicity, we consider only the complexity to realize the Fourier transform using either the FFT or the CTA but neglect the complexity to take the absolute values and to find the maximum from these values in the estimation algorithm. We also assume that the size of FFT should be of radix 2 such that realizing an FFT of length N requires N2 log2N complex multiplications and N log2N complex additions. Hence, the FFT approach needs to realize the product r(n)p(n + m) and an FFT operation, and thus requires in total N +N2 log2N multiplications and N log2N additions. The CTA, in addition to realizing one FFT and one IFFT of length L, needs to realize 2L + 1 complex multiplications, including N multiplications for realizing the product r(n)p(n + m)e−jωbnWn2/2, L multiplications for Y0(l)H0(l), and M multiplications for z0(k)Wk2/2. Hence,
the CTA in total requires 2L + 1 + L log2L multiplications and 2L log2L additions. Note that the FFT operation on h0(n) is not included because it can be computed and stored prior to the frequency acquisition.
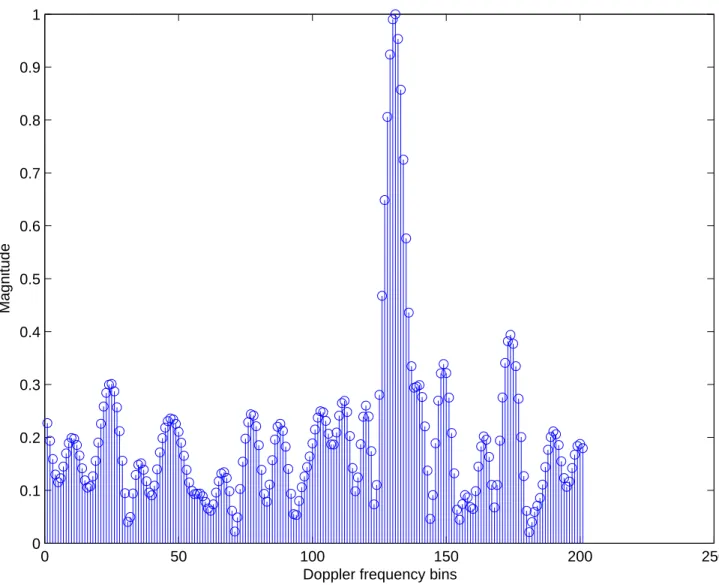
Assume for example that the Doppler frequency may vary from -10 kHz to 10 kHz and the sampling frequency is 3 MHz. If the required resolution is 100 Hz, then the data length should be no less than 30000 for the FFT approach to attain this resolution. Hence, let the data length of the FFT approach be N = 32768; its realization will demand 278528 multiplications and 491520 additions. Using CTA, we need M − 1 = 20k/100 = 200 and thus M = 201. The FFT size can be chosen up to L = 16384 under which the CTA realization complexity is still less than that of the FFT. If L = 4096, then the CTA realization, besides the reduction in memory, demands 57345 multiplications and 98304 additions, about one fifth of the computation complexity of the FFT approach. The simulation of the CTA approach for L = 4096 with the signal-to-noise ratio (SNR) of −20 dB, ωb = 0 and ωd/2π = 3000 Hz has been performed; one typical
simulation result of |Y (ejωk)| for k = 0, · · · , 200 is shown in Fig. 1.3 in which the maximum peak occurs
at the bin number 131, corresponding to the frequency of 3000 Hz, demonstrating the effectiveness of this approach.
1.6
Summary
In this paper, the CTA is employed to develop a frequency-acquisition algorithm which, compared with the FFT approach, is more flexible and yields lower realization complexity at a given resolution for the estimation of the Doppler frequency. The proposed approach is used for the GPS receiver; naturally it can be used for the frequency acquisition of any communications via the modulation technique of the direct sequence spread spectrum.
FFT IFFT FFT data for n=N−1,...,L Extracting last M Padding M−1 zeros r(n) p(n + m)e−jωbnWn2/2 y(n) y0(n) Y0(l) h0(n) H0(l) z(n) z0(k) Wk2/2 , (k = 0, . . . , M − 1) Y (ejωk)
Figure 1.2: The CTA Block diagram using FFT
0 50 100 150 200 250 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Doppler frequency bins
Magnitude
Figure 1.3: One typical CTA simulation result for ∆ω = 2π(100), M = 201, L = 4096, with SNR= -20 dB, ωb= 0, ωd= 2π(3000) and sampling frequency of 3 MHz.
Bibliography
[1] U. J. Cheng, J. H. William, and I. S. Joseph, “Spread Spectrum Code Acquisition in the Presence of Doppler Shift and Data Modulation,” IEEE Trans. Commun., Vol. 38, pp. 241-250, 1990.
[2] C. L. Spillard, S. M. Spangenberg, and G. J. R. Povey, “A Serial-Parallel FFT Correlator of PN Code Acquisition from LEO Satellites,” IEEE, Int. Symp. Spread Spectrum Techniques and Applications, Vol. 2, pp. 446-448, Sept. 1998
[3] Y. F. Liu, Z. J. Chen, and S. L. Gus, “Implement and Performance Analysis of PN Code Acquisition Based on FFT,” Proc. of the 5th World Congress on Intelligent Control and Automation, pp. 5399-5401 June, 2004.
[4] D. J. R. Van Nee, and A. J. R. M. Coenen, “New Fast GPS Code-Acquisition Technique Using FFT,” IEE Electronics Letters, Vol. 27, pp. 158-160, Jan. 1991
[5] J. Starzyk and Z. Zhu, “Averaging Correlation for C/A Code Acquisition and Tracking in Frequency Domain,” IEEE MWSCS, Ohio, Aug. 2001.
[6] W. H. Zhuang and J. Tranquilla, “Digital Baseband Processor for the GPS Receiver - Modeling and Simulations,” IEEE Trans. on Aerospace and Electronic Systems, Vol. 29, pp. 1343-1349, Oct. 1993. [7] W. J. Hurd, J. I. Statman, and V. A. Vilnrotter, “High Dynamic GPS Receiver Using Maximum
Likelihood Estimation and Frequency Tracking,” IEEE Trans. on Aerospace and Electronic Systems, Vol. 23, pp. 425-437, July 1987.
[8] A. V. Oppenheim, R. W. Schafer, and J. R. Buck, Discrete Time Signal Processing, Prentice Hall, second edition, 1999.
.
二、 計畫成果自評
本計畫是二年期。 目前第一年的研究進度與原計畫內容之預估相接近。 在執行計畫中, 我們也對此方法的相關應用有更深 入的了解並加應用。 因此我們預期應會有一些成果。 我們很感謝國科會的支持, 讓我們可以在研究中成長。 也希望在明年 此計畫能有好的成果展現。