A reversing traversal algorithm to predict deleting node for the optimal
k-node set reliability with capacity constraint of distributed systems
Yi-Shiung Yeh*, Chin-Ching Chiu
Institute of Computer Science and Information Engineering, National Chiao Tung University,1001 Ta Hsueh Road, Hsinchu 300, Taiwan, ROC Received 5 January 2000; accepted 26 May 2000
Abstract
A k-node set reliability with capacity constraint is de®ned as the probability that a set, K, of nodes is connected in a distributed system and the total capacity of the nodes in K is suf®cient under a given capacity. This is generally an NP-hard problem. For reducing computational time, a reasonable k-node set within a given capacity constraint must be determined by an ef®cient algorithm. In this work, we propose a reversing traversal method to derive a k-node set under capacity constraint having an approximate solution. Initially, the set K is assigned to all the nodes in a system. The proposed algorithm uses an objective function to evaluate the ®tness value of each node in K and predict a deleting node, which is not a critical node, in K with minimal ®tness value. After deleting the node, the ®tness value of each node that is adjacent to the deleted node is tuned. The above two processes are repeated until the total capacity of the nodes in each subset of the set K does not satisfy the capacity constraint. In our simulation, the proposed method can obtain an exact solution above 90%. When a sub-optimal solution is obtained, the average deviation from an exact solution is under 0.0033. Computational results demonstrate that the proposed algorithm is ef®cient in execution time and effective for obtaining an optimal k-node set with capacity constraint. q 2001 Elsevier Science B.V. All rights reserved.
Keywords: Reversing traversal algorithm; Distributed systems; Reliability optimization; k-node set reliability
1. Introduction
Distributed systems provide cost-effective ways for improving a computer system's performance such as throughput, fault-tolerance, and reliability optimization [1,2]. The reliability optimization of a DS has become a critical issue. Many computers networked over several universities, are such a distributed system. Those schools are willing to offer their computer resources but with resource constraints (e.g. CPU time, memory space, disk quota). Therefore, the data-®les of each sever are distributed among several computers under the resource constraints on each computer. The schools are requested to list what services their computers can afford, so that the entire infor-mation system can be planned and the reliability of each computer or communication link evaluated according to the ratio of time periods individual computers will be unavail-able [3]. When some data ®les are allocated into a DS, a set K of nodes in the DS must be selected to allocate the data ®les such that a k-node set reliability (KNR) is adequate under the constraints.
Computing the reliability of a distributed system is gener-ally an NP-hard problem [4,5]. Much research has been performed to provide reliability optimization models of DS that optimize source to destination reliability, k-out-of-n systems reliability ak-out-of-nd overall system reliability [6±12]. An exact method (EM) [13] and a k-tree reduction method [14] have been used to examine KNR optimization with capacity constraint. The EM is based on the partial order relation and propose some rules to indicate the conditions under which certain vectors in the numerical ordering that do not satisfy the capacity constraints can be skipped over. The k-tree reduction method is a greedy algorithm which can reduce immediately disjoint terms and avoids unneces-sary spanning tree generation.
The EM can obtain an optimal solution, but cannot effec-tively reduce the problem space. Moreover, an increasing number of nodes causes the EM execution time to exponen-tially grow. Occasionally, an application requiring an ef®-cient algorithm with an approximate solution is highly attractive. The k-tree reduction method is one method that obtains a k-node set using a heuristic search. It serves the ®rst node v1as the starting node and adds a node to the
k-node set depending on the maximum the reliability product of a current selected set and the total capacity of nodes of
www.elsevier.com/locate/comcom
0140-3664/01/$ - see front matter q 2001 Elsevier Science B.V. All rights reserved. PII: S0140-3664(00)00242-5
* Corresponding author. Tel.: 1886-3-5724176; fax: 1886-3-5712121. E-mail address: [email protected] (Y.-S. Yeh).
that set. The product of the above expression relies heavily on the summation capacity of each selected node but depends slightly on k-node reliability. Therefore, its compu-tational complexity is still high and the average derivation from the exact solution is not ideal.
In summary, the previous methods are all extremely inef-®cient. The objective of this paper is to propose a reversing traversal algorithm for obtaining a subset of network nodes such that the reliability is maximum or nearly maximum and the speci®ed capacity constraint is satis®ed.
The rest of this paper is organized as follows. Section 2 de®nes the KNR problem. Section 3 discusses the predicting a removal node concept, treats an algorithm for KNR and illustrates an example. Section 4 describes the environment and parameters for verifying the algorithm. Section 5 provides the results of various parameters speci®ed in Section 4 and analyzes the time complexity and deviation from the exact solution. Section 6 presents the concluding remarks.
2. Problem description
In this section, we described the problem addressed herein for convenience and clari®cation our research objec-tives.
2.1. Notations and de®nitions
The following notations, and de®nitions will be used. Notations
G V; E an undirected DS graph where V denotes a set of processing elements, and E represents a set of communication links
n the number of nodes in G, n uVu
vi the ith processing element or the ith node
c(vi) the capacity of the ith node
e the number of links in G, e uEu
ei, j an edge represents a communication link between
viand vj
pi, j the probability of success of link ei, j
qi, j the probability of failure of link ei, j
Gk the graph G with the set k of nodes speci®ed, and
uku $ 2
R(Gk) the reliability of k-node set solution of a DS graph
G
c(Gk) the sum of capacity of k-node set of a DS graph G
Cneed total capacity constraint in a DS
w(Gk) object function for evaluating the weight of Gk
d(vi) the number of links connected to the node vi
wfast(vi) the approximate weight of the ith node
w(ei, j) the weight of the link ei, j
woptimal(vi) the optimal weight of the ith node
X {viuc Gk 2 c vi $ Cneed; vi[ Gk}
Y {viuvi[ X and Gk2 {vi} is connected without
through a node in V 2 {Gk< {vi}}
dsame 1, if all d(vi) is same each other 0, otherwise
FT(vi) the ®tness value of the ith node
Vvisit a set of nodes which are connected by some
speci-®ed links
DSRapp an approximate solution which obtained by
running heuristic algorithm
DSRopt optimal solution which obtained by running
exhaustive search algorithm
Rerr the value of relative error which is equal to 1 2
DSRopt=DSRapp
cd the maximal value of max(c(vi))/min(c(vi)) for
tuning the range of each node's capacity
CD a value of Cneed= Pni1c vi=nfor tuning the rang of capacity constraint, i.e. Cneed Pni1c vi=n £ CD
De®nition 1. A KNR is de®ned as the probability that a speci®ed set K of nodes is connected (where K denotes a subset of the set of processing elements).
De®nition 2. A critical node is de®ned as a node, say vi, in G,
if G0represents v
iand all the links which are incidence with
videleted in G, G0with at least two connected components.
De®nition 3. Capacity constraint is de®ned as the total memory size required when some ®les are loaded into the system.
De®nition 4. Absolute error is de®ned as the value of subtracting an approximate solution from an exact solution of KNR.
De®nition 5. Relative error is de®ned as the value of dividing an exact solution into the absolute error.
De®nition 6. The ratio of average relative error is de®ned as the value of dividing the summation of relative error by the number of the total simulation cases under consideration. 2.2. Problem statements
A set K of nodes can be derived from the given set V that constitutes a DS in that KNR is adequate and the total capa-city satis®es the capacapa-city constraint. Consider a DS of n nodes and e links. The capacity constraint is Cneed, where
its optimal DS topology is the set K of nodes. Restated, the set K of nodes has the maximum reliability and its total capacity at least is as large as the capacity constraint Cneed.
The main problem can be mathematically stated as follows:
Object: Maximize R(Gk)
subject to:Pvi[Gkc vi $ Cneed
where R(Gk), c(vi), Cneedare de®ned in Section 2.1.
Obviously, the problem for a large DS, as in a metropo-litan area network, requires a large execution time. 3. Reversing traversal algorithm for searching an optimal k-node set
adequate k-node set with capacity constraint. The analysis performed herein assumes that all the nodes are perfect and all the links are unreliable.
3.1. Computing KNR
Bi-directional communication channels operate between processing elements. A distributed computing system can be modeled using a simple undirected graph. For a topology of
the DS with n nodes and e links, there are 2n subsets of
nodes. A set, K, is a subset of the DS which includes some nodes of the given node set V. The KNR is the prob-ability that a speci®ed set K of nodes is connected, where K denotes a subset of the set of processing elements. Fig. 1 depicts the bridge topology of a DS with four nodes and six links.
For example, when K {v1; v4} is selected in the DS
with bridge topology, then the reliability of the set, K, can be computed using a factoring algorithm as follows R Gk p1;2{p3;4 p1;41 p2;42 p1;4p2;4 1 p1;31 p2;32 p1;3p2;3 2 p1;41 p2;42 p1;4p2;4 £ p1;31 p2;32 p1;3p2;3 1 q3;4 p1;41 p2;42 p1;4p2;4} 1 p1;2p3;4 p1;31 p1;42 p1;3p1;4 1 q3;4 p1;41 p1;3p2;3p2;42 p1;4p1;3p2;3p2;4: The reliability of the set, K, can also be computed by means of a sum of mutually disjoint terms [15]
R Gk p1;2q1;3p1;4p2;3q2;4q3;41 p1;2q1;3p1;4q2;3q2;4 1 q1;2q1;3p1;41 p1;2p1;3p1;4q2;3q2;4q3;4 1 q1;2p1;3p1;4q2;3q3;41 q1;2p1;3p1;4p2;3q2;4q3;4 1 p1;2p1;3q2;3p2;4q3;41 p1;2q1;3q2;3p2;4 1 p1;2q1;3p2;3p2;4q3;41 p1;3q2;3p3;4 1 q1;2p1;3p2;3q2;4p3;41 p1;2p1;3p2;3q2;4p3;4 1 p1;2q1;3p2;3p3;41 p1;3p2;3p2;4
Assume that the probability of p1,2, p1,3, p1,4, p2,3, p2,4and p3,4
is 0.74, 0.94, 0.83, 0.68, 0.57 and 0.46, respectively. We
obtain R Gk 0:9539197 using the above two methods.
3.2. The concept of proposed algorithm
The number of ports at each node (degree of a node), and the number of links directly impact the system reliability, while reliability decreases with a decrease in the number of links [2,16]. Therefore, we can quickly obtain the weight of each link and node according to the DS topology and the reliability of each link. We can serve V as k-node set. Then, we try to ®nd an objective function to evaluate the ®tness value of each node and select a node with the minimal ®tness value and that is not a critical node for deletion. After deleting the node, the ®tness value of each node is tuned which is adjacent to the deleted node. The latter two steps are repeated until no node can be deleted.
3.2.1. Initializing the k-node set
The algorithm initializes the k-node set as all the proces-sing elements in the DS.
3.2.2. Evaluating the approximate weight of a node The reliability of connecting the selected nodes is depen-dent on the degree of links and the link reliability. For a given node, the node degree can affect the information transformation between two nodes. The following formula
is used to compute the approximate weight of node vi
wfast vi max{pijueijis incident with vi} 1
3.2.3. Evaluating the weight of a link
In the network, two nodes may contain many paths between them. The length of a path is between one and n 2 1. To reduce the computational time, the path in which the length is not greater than two is considered. The following formula is used to evaluate the weight of link ei, j
w ei;j 1 2 qi;j Yyi; j
z1
qi;kzqkz;j 2
where yi, j denotes the number of paths with a length two
between viand vj. In addition, the value of yi, jis not greater
than n 2 2: This formula can easily edit a program and reduces many unnecessary multiplication operations. The weight of ei, jcan be computed in one subtraction 2yi;j2 1 multiplication. Thus, in the worst case, when the graph is a complete graph, we can obtain all the weights of each link in e addition and 2ne±5e multiplication.
3.2.4. Evaluating the optimal weight of a node
We employed a simple method for computing the node value, which takes less time and can quickly compute the weight of every node. The following formula is used to
compute the weight of node vi Woptimal vi 1 2 Y d vi z1 1 2 w ei;kz 3
The above formula is easy to program and reduces many multiplicative operations. If the degree of vi is d(vi), the
weight of vican be computed in one subtract and d vi 2
1 multiplication. Thus, we can obtain the weight of every node in n addition and 2e multiplication.
3.2.5. Reducing the order of k-node set
The following observations can be made on how to reduce a k-node set. For a given selected k-node set, the reliability of this k-node set is less than the reliability of its proper subset. Thus, during the reliability evaluation process, if the total subset capacity of selected set is at least as large as capacity constraints, then the selected set should be replaced by its subset.
3.2.6. Objective function for obtaining ®tness value of a node
We can obtain following simple objective function to evaluate each node's ®tness value of a k-node set before discarding a node
FT vi
Wfast vi; if n e
Woptimal vi; if ;deg vi is same each other and n ± e
Woptimal vi £ Wfast vi; otherwise; 8 > > < > > : 4 where FT(vi), wfast(vi), woptimal(vi) is de®ned in Section 2.1.
3.2.7. Predicting a removal node
After obtaining each node's ®tness value, a node is selected for deletion, say vi, which has the minimal ®tness
value and all the other nodes in the k-node set are connected without through any nodes which are not in k-node set or the node vi.
3.2.8. Tuning the weight of a node
After discarding a node, say vi, the weight of each node is
tuned, say woptimal(vj), which is adjacent to vias follows:
Woptimal vj 1 2 Y d vi 2 1 z1;kz±j 1 2 w ei;kz 5 3.3. Proposed algorithm
A heuristic algorithm is presented to obtain an optimal k-node set with suf®cient capacity in a DS. The algorithm is based on an objective function to evaluate the ®tness value of each node in K and then discard the node which is not critical and has the minimum ®tness value. This process will
be performed until the total capacity of proper set is less than the capacity constraint.
Algorithm reverse_traversal_KNR Step 0 Read a DS topology: n, e, V, E.
Generate pi, jof each link, c(vi) of each node and Cneed
using random number generator.
Step 1 /*evaluate the approximate weight of each node using Eq. (1) and inspect whether the degree of each node is equal to each other.*/
Let Etmp E: dowhile Etmp! B
choose a link, say ei, j, from Etmp.
if pi;j. wfast vi wfast vi pi;j: end if if pi;j. wfast vi wfast vj pi;j: end if Let d vi d vi 1 1: Let d vj d vj 1 1:
Let Etmp Etmp2 {ei;j}:/*discard ei, jfrom Etmp*/
end dowhile
Let dsame 1 /*set dsameto TRUE.*/
Let dtmp d vi: Let Vtmp V: dowhile Vtmp! B
choose a node from Vtmp.
if d vi! dtmp
Let dsame 0:/* set dsameto FALSE.*/
break. end if
Let Vtmp Vtmp2 {vi}: end while
Step 2 /*Evaluate the weight of each link using Eq. (2).*/ Let Etmp E:
dowhile Etmp! B
choose a link, say ei, j, from Etmp.
Let w ei;j qi;j; Let k 1: Dowhile k , n
if (link ei,kand ek,jare belong to E)
Let w ei;j w ei;j*qi;k*qk;j: end if
Let k k 1 1: end dowhile
Let w ei;j 1 2 w ei;j:
Let Etmp Etmp2 {ei;j}:/*discard ei, jfrom Etmp*/
end dowhile
Step 3 /*Evaluate the optimal weight of each node using Eq. (3).*/
Let woptimal vi 0; for i 1; ¼; n: Let Etmp E:
dowhile Etmp! B
choose a link, say ei, j, from Etmp.
Let woptimal vi w ei;j: else
Let woptimal vi woptimal vi* 1 2 woptimal vi *w ei;j:
end if
if woptimal vj 0
Let woptimal vj w ei;j: else
Let woptimal vj woptimal vj* 1 2 woptimal vj *w ei;j:
end if
Let Etmp Etmp2 {ei;j}:/*discard ei, jfrom Etmp*/
end dowhile
Step 4 /*evaluate the ®tness value using Eq. (4).*/ Let Vtmp V:
dowhile Vtmp! B choose a node from Vtmp.
if n e
Let FT vi wfast vi: else if dsame 1
Let FT vi woptimal vi: else
Let FT vi wfast vi*woptimal vi; for i 1; ¼; n:
end if end if
Let Vtmp Vtmp: end while
Step 5 Let Gk V: /* V is all the nodes in the DS */ Step 6 /*Find each vi, in Gk, so that c Gk 2 c vi $ Cneed:*=
Let X { }: Let Vtmp Gk: dowhile Vtmp! B
choose a node, say vi, from Vtmp.
if c Gk 2 c vi $ Cneed Let X X < {vi}: end if Let Vtmp Vtmp2 {vi}: end dowhile if X B go to step 9. end if
Step 7 /* ®nd each vi, in X, so that Gk2 {vi} is connected without through a node in V 2 Gk< vi:*=
Let Y { }: dowhile X! B
Let Vvisit { }:
choose a node, say vi, from X.
Let Etmp E:
dowhile Etmp! B or Vvisit! Gk2 {vi} choose a link, say es,t, from Etmp.
if vs[ Gk2 {vi} and vt[ Gk2 {vi} Let Vvisit Vvisit< {vs; vt}:
end if
Let Etmp Etmp2 {es;t}:/*discard es,tfrom Etmp*/
end dowhile if Vvisit Gk2 {vi} Let Y Y < {vi}: end if Let X X 2 {vi}: end dowhile if Y B go to step 9. end if
Step 8 /*Find a vi, in Y, so that vi min{FT viuvi[ Y}:*=
Let wtmp 1:
dowhile Y! B /* ®nd a node, in Y, with a minimal ®tness value.*/
choose a node, say vi, from Y.
if FT vi , wtmp Let vx vi: Let wtmp FT vi: end if Let Y Y 2 {vi}: end dowhile Let Gk Gk2 {vx}: Let c Gk c Gk 2 c vx: if n! e and dsame 0
/*tune the ®tness value of nodes which is adjacent to the deleted node vx.*/
For each viwhich is adjacent to vx,
Let FT vi FT vi=wfast vi:
Let woptimal vi 1 2 1 2 woptimal vi= 1 2 w ex;i:
Let FT vi FT vi*wfast vi: end if
go to step 5.
Step 9 /* reduce the order of the k-node set as much as possible, ®nd a vi, in Gk, so that vi min{c viuvi[ Gk}:*=
dowhile c Gk . Cneed choose a node, say vi, from Gk.
Let ctmp c vi:
dowhile Gk! B /* ®nd a node, in Gk, with a
minimal capacity.*/
choose a node, say vi, from Gk2 {vi}: if c vi , ctmp Let vx vi: Let ctmp c vi: end if end dowhile if c Gk 2 c vx . Cneed Let Gk Gk2 {vx}: Let c Gk c Gk 2 c vx: end if end dowhile
Step 10 Compute R(Gk) using syrel [15], output the
k-node set Gkand its reliability.
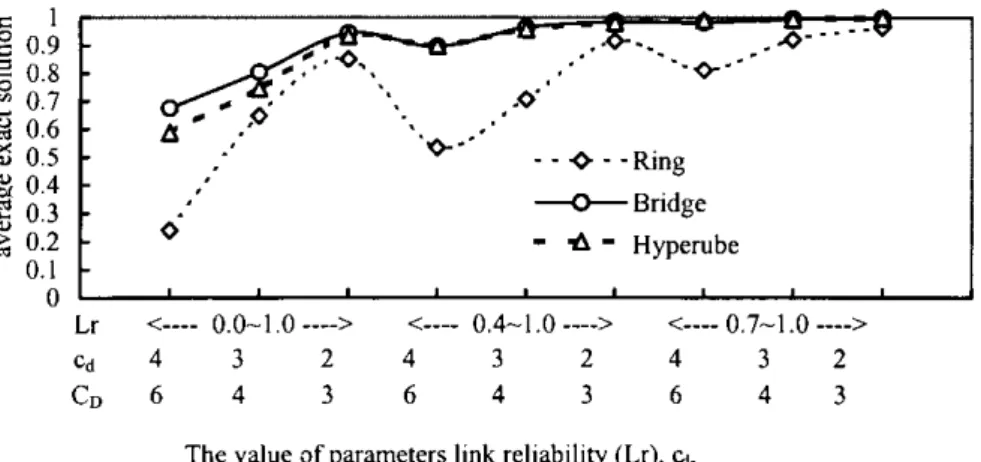
Fig. 3. The results of the average exact solution of KNR using exhaustive method on different topologies and parameters considerations.
Table 1
The results obtained using different methods for various DS topologies
Size Optimal solution EM k-tree reduction method Proposed method
na eb DSR
optc k-node setd Time (s)e Rerrf Time (s) Rerr Time (s)
10 17 0.9994068 2,8,9 10.98 0.0074441 8.69 0.0 0.64 10 19 0.9995282 1,5,6 58.88 0.0019527 15.06 0.0 2.37 11 16 0.9911286 1,6,11 10.88 0.0378511 4.97 0.0 1.45 11 17 0.9974023 1,10,11 29.55 0.0120129 7.54 0.0 1.95 12 18 0.9858263 3,4,5,6 52.07 0.0299250 6.22 0.0 2.92 12 21 0.9990777 1,3,5,6 679.04 0.0056617 72.00 0.0 4.73 13 20 0.9978402 4,6 125.23 0.0189070 102.09 0.0006842 3.04 17 20 0.7644486 2,3,4,5 219.21 0.2224275 8.86 0.0 3.11 19 31 0.9979870 6,8,9 761.24 0.0856661 507.62 0.0031965 4.88 30 30 0.9856600 2,3,4 404.91 0.0706510 14.30 0.0 1.13 32 33 0.9937695 2,3,4 964.58 0.1050981 895.70 0.0 7.31 60 60 0.9530911g 5,6 ±h 0.1408611 199.17 0.0 5.63 120 120 0.9800450g 2,3 ±h 0.1812755 2042.94 0.0 29.34
a n: the numbger of nodes in G. b e: the number of links in G. c DSR
opt: optimal solution which obtained by running exhaustive search algorithm; DSRapp: approximation solution which obtained by running heuristic
algorithm.
d k-node set: selected nodes.
e Time: seconds for obtaining k-node set whose reliability is maximal. f R
err: the value of relative error which is equal to 1 2 DSRopt=DSRapp:
g Value obtained by manual calculation. h Value barely obtained.
End reverse_traversal_KNR 3.4. An illustrative example
Fig. 2 illustrates the topology of a DS with eight nodes and twelve links. The problem involves determining a subset of the DS that includes some of the nodes v1, v2,
¼, v7, v8whose total capacity is at least as large as
thirty-one units.
In step 0, read the DS topology and randomly generate the reliability of each link and the capacity of each node and the capacity constraint, as displayed in Fig. 3.
In Step 1, obtain wfast v1; wfast v2; ¼, and wfast(v8) are
0.742637, 0.989624, 0.904599, 0.989624, 0.990020, 0.990020, 0.910642 and 0.758843, respectively.
In Step 2, obtain the weight of e1,2, e1,5, ¼, e7,8 are
0.778235, 0.652651, 0.976457, 0.996901, 0.565664, 0.977798, 0.766052, 0.663030, 0.992116, 0.924252, 0.931039 and 0.805808, respectively.
In Step 3, obtain woptimal v1; woptimal v2; ¼, woptimal v8 are 0.92297, 0.999993, 0.999477, 0.999995, 0.999910, 0.999456, 0.999763 and 0.934563, respectively.
In Step 4, obtain the ®tness value of FT v1; FT v2; ¼,
FT v8 are 0.685432, 0.989617, 0.90416, 0.989618,
0.989931, 0.989482, 0.910426 and 0.709186, respectively. In step 5, Gk V {v1;2; v3; v4; v5; v6; v7; v8}:
In step 6, obtain the set X {viuc Gk 2 c vi $ Cneed} {v1; v2; v3; v4; v5; v6; v7; v8}:
In step 7, obtain the set Y {viuvi[ X and Gk2 {vi}} is connected without through any node in V 2 {Gk< {vi}} {v1; v2; v3; v4; v5; v6; v7; v8}:
In Step 8, because the value of w(v1) is minimum, v1is
Table 2
The results obtained using k-tree reduction method for three DS topologies with eight nodes
T(s)a Lrb c
dc CDd AESe HitRf ARErrRg UpErrBndh UpErrBndRi ARErrRlnkj ARErrRTk
Ring (n8e8) 0.0±1 4 6 0.239511 30 0.164248 0.293497 0.74322 3 4 0.647318 40 0.234192 0.414967 0.87533 2 3 0.850519 30 0.295076 0.573058 0.671024 0.231172 0.4±1.0 4 6 0.534633 0 0.37804 0.576078 0.82229 3 4 0.706684 10 0.289142 0.528725 0.618443 2 3 0.914725 0 0.17879 0.226831 0.315245 0.281991 0.7±10 4 6 0.811063 0 0.084463 0.140802 0.153146 3 4 0.920673 0 0.140077 0.168355 0.179859 2 3 0.963919 10 0.059963 0.145553 0.157428 0.094834 0.202666 Bridge (n8e12)(Fig. 3) 0.0±1.0 4 6 0.673502 30 0.193834 0.449903 0.636683 3 4 0.803006 0 0.359327 0.693904 0.845069 2 3 0.943866 0 0.281859 0.397201 0.518118 0.27834 0.4±1.0 4 6 0.895392 0 0.158996 0.275139 0.318859 3 4 0.963701 0 0.098579 0.196163 0.206595 2 3 0.984607 10 0.122654 0.347362 0.348134 0.126743 0.7±1.0 4 6 0.981713 0 0.040552 0.075066 0.076287 3 4 0.994233 10 0.020554 0.044664 0.045001 2 3 0.997221 0 0.022574 0.052358 0.052402 0.027893 0.144325 Hypercube (n8e12) 0.0±1.0 4 6 0.586086 10 0.256013 0.358596 0.308105 3 4 0.744266 10 0.248013 0.398589 0.547448 2 3 0.933596 0 0.300219 0.815804 0.822601 0.268082 0.4±1.0 4 6 0.898183 0 0.046946 0.112462 0.129018 3 4 0.957629 0 0.04992 0.117201 0.123205 2 3 0.980899 10 0.048929 0.11568 0.116619 0.048598 0.7±1.0 4 6 0.990639 0 0.007818 0.013755 0.013854 3 4 0.993888 20 0.005746 0.020516 0.006131 2 3 0.998169 20 0.00677 0.024302 0.024318 0.006778 0.107819 Average 8.9 0.151603 (0.280612)l (0.358312)l 0.151603 0.151603
a T(s): represents the topology (size) of a DS.
bLr: the range of link's reliability, the reliability is obtained by random generator. c c
d: the maximal value of max(c(vi))/min(c(vi)) for tuning the range of each node's capacity. dC
D: the value of Cneed= Pni1c vi=n for tuning the range of capacity constraint, i.e. Cneed Pni1c vi=n £ CD:
e AES: the value of average exact solution whose value is [P(DSR
opt]/(total simulation cases). fHitR: the ratio of obtaining exact solution.
gARErrR: the value of (P[1 2 (DSR
opt/DSRapp)])/(total simulation cases). hUpErrBnd: the upper error bound whose value is the max(DSR
opt2 DSRapp) in total simulation cases. i UpErrBndR: the value of the max[(DSR
opt2 DSRapp)/DSRopt] in total simulation cases. j ARErrRlnk: the value of average of ARErrR which are in same Lr and T(s).
kARErrRT: the value of average of ARErrR which are in same T(s). l The value is just for reference.
deleted from Gk. Note that Gk is {v2; v3; v4; v5; v6; v7; v8}: Both the v2and v5are adjacent to v1therefore, the weight
of the two nodes is tuned and obtain FT v2 0:989592;
FT v5 0:989794 and go back step 6.
In step 6, obtain the set X {viuc Gk 2 c vi $ Cneed} {v2; v3; v4; v5; v6; v7; v8}:
In step 7, obtain the set Y {viuvi[ X and Gk2 {vi}} is connected without through any node in V 2 {Gk< {vi}} {v2; v3; v4; v5; v6; v7; v8}:
In Step 8, because the value of w(v8) is minimum, v8is
deleted from Gk. Note that Gk is {v2, v3, v4, v5, v6, v7, v8}.
Both of v4and v7are adjacent to v8, therefore, we tune the
weight of the two nodes is tuned and obtain FT v4
0:989608; FT v7 0:909529 and go back step 6.
In step 6, obtain the set X {viuc Gk 2 c vi $ Cneed} B and go to step 9.
In step 9, obtain c v7 4 which is minimal capacity in Gk.
Because c Gk 2 c v7 , 31; no nodes can be deleted in Gk.
In Step 10, the reliability of a k-node set {v2, v4, v5, v6, v7} is
computed using syrel. We have R {v2; v4; v5; v6; v7} 0:8612462 which has the maximum reliability under the capa-city constraint. The number of reliability computation is one. The result is the same as a k-node set, which is derived using an exhaustive method.
4. Simulation
The accuracy and ef®ciency of the proposed algorithm are veri®ed by implementing a C language simulation program executed on a Pentium 100 with 16M-DRAM on MS-Windows 95. We use many network topologies and gener-ated several hundreds of data for simulation. The reliability of each link, the capacity of each node and the total capacity requirement were generated using a random number genera-tor. For verifying the sensitivity of our proposed algorithm, three data categories were given in different ranges. For the link reliability, we considered the following range: 0.0±1.0, 0.4±1.0 and 0.7±1.0. For the capacity of each node in the system, we consider that the quotient of max c vi=min c vi; i 1; ¼; n; to be not greater than 4, 3 and 2, respectively. For the total capacity requirement,
which must be greater than max(c(vi)), we considered the
value of Cneed= Pni1C vi=n to be not greater than 6, 4 and 3, respectively. When the number of nodes in the topology is very large, such as exceeding 60, obtaining the global opti-mal solution using the exhaustive method or EM is nearly impossible. For verifying the correctness of the proposed algorithm, when the topology is very large, we utilized a low connective topology.
Table 3
The results obtained using the proposed method for three DS topologies with eight nodes (the mean of notations is described in the footnotes of Table 2; the value of AES is same as Table 2)
T(s) Lr cd CD AES HitR ARErrR UpErrBnd UpErrBndR ARErrRlnk ARErrRT
Ring (n8e8) 0.0±1 4 6 0.239511 90 0.006996 0.002412 0.050938 3 4 0.647318 90 0.021723 0.158663 0.21723 2 3 0.850519 100 0.0 0.0 0.0 0.009573 0.4±1.0 4 6 0.534633 90 0.011021 0.073199 0.110212 3 4 0.706684 90 0.006193 0.028025 0.61933 2 3 0.914725 90 0.015327 0.011307 0.153269 0.010847 0.7±10 4 6 0.811063 90 0.00514 0.041604 0.051405 3 4 0.920673 90 0.000636 0.005934 0.006358 2 3 0.963919 100 0.0 0.0 0.0 0.001925 0.007448 Bridge (n8e12)(Fig. 3) 0.0±1.0 4 6 0.673502 90 0.001434 0.004985 0.14338 3 4 0.803006 90 0.000172 0.001151 0.001724 2 3 0.943866 100 0.0 0.0 0.0 0.000535 0.4±1.0 4 6 0.895392 80 0.001213 0.007462 0.008212 3 4 0.963701 80 0.005122 0.031653 0.033336 2 3 0.984607 90 0.001437 0.014128 0.01437 0.002591 0.7±1.0 4 6 0.981713 80 0.000306 0.002208 0.002276 3 4 0.994233 90 0.000179 0.001785 0.001786 2 3 0.997221 80 0.000965 0.009181 0.009189 0.000483 0.001203 Hypercube (n8e12) 0.0±1.0 4 6 0.586086 90 0.000919 0.008046 0.009193 3 4 0.744266 90 0.006647 0.021677 0.053438 2 3 0.933596 70 0.0 0.0 0.0 0.002522 0.4±1.0 4 6 0.898183 80 0.000191 0.001684 0.001913 3 4 0.957629 90 0.000237 0.00214 0.002366 2 3 0.980899 100 0.0 0.0 0.0 0.000143 0.7±1.0 4 6 0.990639 100 0.001158 0.008386 0.008397 3 4 0.993888 100 0.0 0.0 0.0 2 3 0.998169 100 0.0 0.0 0.0 0.000386 0.001017 Average 90 0.003223 (0.16134) (0.034849) 0.003223 0.003223
5. Results and discussion
Table 1 presents the data on the results obtained using different methods for various DS topologies. In contrast to
the EM and the k-tree reduction method, the execution time grew rapidly when the DS topology size is increased. The proposed method grew very slowly. The deviation was small when the proposed method could not obtain an
Table 4
The average k-tree reduction method execution time and the proposed method for three DS topologies with eight notes (the mean of the other notations is described in the footnotes of Table 2)
k-tree reduction method The proposed method
T(s) Lr cd CD AT (s)a ATlnk (s)b ATT (s)c AT (s) ATlnk (s) ATT (s)
Ring (n8e8) 0.0±1 4 6 0.248 0.016 3 4 0.137 0.006 2 3 0.140 0.175 0.006 0.0093 0.4±1.0 4 6 0.258 0.011 3 4 0.226 0.011 2 3 0.054 0.152 0.006 0.0093 0.7±10 4 6 0.236 0.026 3 4 0.166 0.006 2 3 0.67 0.183 0.170 0.015 0.0156 0.0114 Bridge (n8e12)(Fig. 3) 0.0±1.0 4 6 0.33 0.05 3 4 0.323 0.026 2 3 0.207 0.2866 0.006 0.0273 0.4±1.0 4 6 0.431 0.057 3 4 0.259 0.033 2 3 0.187 0.2923 0.012 0.034 0.7±1.0 4 6 0.418 0.03 3 4 0.286 0.021 2 3 0.149 0.2843 0.2877 0.006 0.019 0.0267 Hypercube (n8e12) 0.0±1.0 4 6 0.631 0.364 3 4 0.399 0.191 2 3 0.126 0.3853 0.099 0.218 0.4±1.0 4 6 0.604 0.34 3 4 0.351 0.207 2 3 0.11 0.355 0.11 0.219 0.7±1.0 4 6 0.626 0.376 3 4 0.085 0.207 2 3 0.11 0.3403 0.3602 0.11 0.2316 0.2226 Average 0.2727 0.2727 0.2727 0.0870 0.0870 0.0870
a AT: the seconds of average execution time, AT (P(execution time))/(total simulation case). bATlnk: the seconds of average execution time of same Lr and T(s).
c ATT: the seconds of average execution time of same T(s).
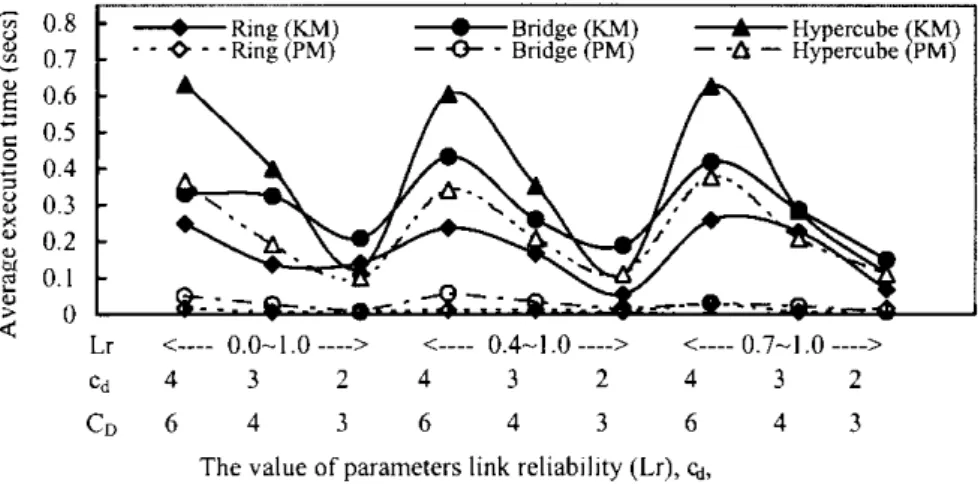
Fig. 4. The average relative error ratio from the average exact solution using k-tree reduction method (KM) and the proposed method (PM) on different topologies and parameters consideration.
optimal solution. Tables 2±4 list the results obtained using the k-tree reduction and our proposed method for three different topologies (ring, bridge, hyper-cube) with eight nodes, respectively. These data show that the proposed method is more effective than the conventional method.
In contrast to the computer reliability problem, which is static oriented, an optimal k-node set with capacity constraint in the DS are dynamic-oriented has many factors such as node capacity, DS topology, link reliability, capa-city constraint and the number of paths between each node can signi®cantly affect the ef®ciency of the algorithm [2,5,17]. Thus, exactly quantifying the time complexity is extremely dif®cult. The complexity of the EM is O 2 e1n; where e denotes the number of links and n represents the number of processing elements. The complexity of the k-tree reduction method is O 2en2:
In our proposed algorithm, in the worst case, the complexity of steps 0; 1; ¼; 10 are O e 1 n; O e 1 n; O en; O e; O n; O 1; O n 2 ukun; O n 2 ukune; O n 2 ukun; O n2 and O m2; respectively, where m denotes the number
of paths of a selected k-node set [15], uku is the order of a selected set. Therefore, the complexity of the proposed algo-rithm is O n 2 ukune 1 m2:
There is an investigation on the reliability error bound [18]. In our simulation cases, consequently, we obtained information as follows. According to Tables 2 and 3, the reliability of a k-node set was correlated with topology density and negatively correlated with cdand CD, therefore
high connective DS lead to a high a KNR, low value cdand
CDpossess a high KNR. For example, Fig. 3 demonstrates
that the average exact solution for KNR of hyper-cube and bridge topologies is better than that for the ring topology corresponding link reliability. When the DS topology and the link reliability are ®xed, the parameters cdand CDaffect
the average exact KNR solution. For example, the average exact KNR solution when cdis set to four and CDis assigned
to six is worse than when cdis set to three or two and CDis
assigned to four or three. Without a loss of generality, the ratio of the average relative error was negatively correlated with the link reliability range and the number of links. For
Fig. 5. The average relative error ratio from the average exact solution using k-tree reduction method (KM) and the proposed method (PM) on different topologies and parameters consideration. (use logarithm scale).
example, Figs. 4 and 5 display that the average relative error ratio increased as the number of links decreased, that is, the ring topology lead to the highest average relative error ratio. Figs. 4 and 5 reveal that the proposed algorithm can improve the average relative error ratio in various topologies and parameters. In the k-tree reduction method, which obtains the exact solution about 9%, the average relative error ratio from average exact solution exceeds 0.1516. The maximal error bound average exceeds 0.280612. In proposed algo-rithm, the exact solution can be obtained about 90%, the average relative error ratio from exact solution is about 0.0032. The maximal error bound average is about 0.016134. According to Table 4, the execution time was independent of the link reliability, but it increased as the number of links, CD, cd increased. Figs. 6 and 7 illustrate
the average k-tree reduction method execution time and the proposed method. The average execution time is dependent on not only the topology of DS, but also on cdand CD. In Fig.
6, the proposed algorithm is more ef®cient than the k-tree reduction method. The average k-tree reduction method execution time and the proposed method are 0.2727 and 0.087 s, respectively.
From Figs. 4±7, we observe the relationship between the average execution time and the average relation error ratio. The average execution time is highly affected not only by the parameters of the maximal value of max c vi=min c vi; e.g. cd, and the capacity constraint, e.g. CD, which we need,
but also by the DS topology. The high cdand CDvalue may
increase the average execution time. The average relation error ratio is strongly affected by the DS topology, but the cd
and CDare not strong.
The proposed method was faster than the k-tree reduction method. When the DS is suf®ciently large, the proposed algorithm can obtain a much better solution than the k-tree reduction method. Moreover, the proposed algorithm can reduce the computation time in a large DS. The
proposed algorithm is in the worst case, when the max c vi=min c vi quotient has a high value. In this case, the deviation from exact solution seems to increase. If the max c vi=min c vi quotient is equal to one, the proposed method is in the best case.
6. Conclusions
This paper has presented a reversing traversal algorithm for obtaining an approximate KNR with capacity constraint in a DS. The accurate prediction hit ratio for a deleting node is very high and the reliability computation number is just one. Our numeral results show that the proposed algorithm may obtain a k-node set that has maximal or nearly maximal KNR in most cases and the computation time seems to be signi®cantly shorter than that needed for the EM and the k-tree reduction method. When the proposed method fails to give an exact solution, the deviation from the exact solution appears very small. To sum up, the technique presented in this paper is an ef®cient means for obtaining an adequate k-node set with capacity constraint in a large DS.
References
[1] T. Tsuchiya, Y. Kakuda, T. Kikuno, Three-mode failure model for reliability analysis of distributed programs, IEICE Trans. Inf. Systems E80-D (1) (1997) 3±9.
[2] D.J. Chen, T.H. Huang, Reliability analysis of distributed systems based on a fast reliability algorithm, IEEE Trans. Parallel Distributed Systems 3 (2) (1992) 139±154.
[3] G.J. Hwang, S.S. Tseng, A. heuristic, A heuristic task assignment algorithm to maximize reliability of a distributed system, IEEE Trans. Reliability R-42 (3) (1993) 408±415.
[4] M.A. Aziz, Pathset, enumeration of directed graphs by the set theo-retic method, Microelectron Reliab. 37 (5) (1997) 809±814. [5] A. Kumar, D.P. Agrawal, A. generalized, A generalized algorithm for Fig. 7. The average k-tree reduction method (KM) execution time and the proposed method (PM) on the different parameters consideration (use logarithm scale).
evaluation distributed program reliability, IEEE Trans. Reliability 42 (3) (1993) 416±426.
[6] P. Tom, C.R. Murthy, Algorithms for reliability-oriented module allocation in distributed computing systems, J. Systems Software 40 (2) (1998) 125±138.
[7] D. Torreri, Calculation of node-pair reliability in large networks with unreliable nodes, IEEE Trans. Reliability 43 (3) (1994) 375±377. [8] D.W. Coit, A.E. Smith, Reliability optimization of series Ð parallel
systems using a genetic algorithm, IEEE Trans. Reliability 45 (2) (1996) 254±260.
[9] F. Altiparmak, B. Dengiz, A.E. Smith, Reliability optimization of computer communication networks using genetic algorithms, Proc. IEEE Int. Conf. Syst. Man Cybern. 5 (1998) 4676±4680.
[10] M.S. Lin, D.J. Chen, New reliability evaluation algorithms for distrib-uted computing systems, J. Inf. Sci. Engng 8 (3) (1992).
[11] M.S. Lin, M.S. Chang, D.J. Chen, Ef®cient algorithms for reliability analysis of distributed computing systems, J. Inf. Sci. Engng 17 (1/2) (1999).
[12] L.C. Hwang, C.J. Chang, Analysis of a general limited scheduling mechanism for a distributed communication systems, Computer Network 31 (18) (1999) 1879±1889.
[13] R.S. Chen, D.J. Chen, Y.S. Yeh, Reliability optimization of distrib-uted computing systems subject to capacity constraint, J. Computers Math. Appl. 29 (4) (2000) 93±99.
[14] R.S. Chen, D.J. Chen, Y.S. Yeh, A. new, heuristic approach for reliability optimization of distributed computing systems subject to capacity constraints, J. Computers Math. Appl. 29 (3) (1995) 37±47. [15] S. Hariri, C.S. Raghavendra, syrel: a symbolic reliability algorithm based on path and cuset methods, IEEE Trans. Computers C-36 (10) (1987) 1224±1232.
[16] D.J. Chen, R.S. Chen, T.H. Huang, Heuristic approach to generating ®le spanning trees fro reliability analysis of distributed computing systems, J. Computers Math. Appl. 34 (10) (1997) 115±131.
[17] M. Ka®l, I. Ahmad, Optimal task assignment in heterogeneous distrib-uted computing systems, IEEE Concurrency 6 (3) (1998) 42±51. [18] F.S. Makri, Z.M. Psillakis, Bound for reliability of k-within
connected-(v,s) out-of (m,n) failure systems, Microelectron Reliab. 37 (8) (1997) 1217±1224.
Yi-Shiung Yeh Ð Education: September 1981±December 1985 PhD in Computer Science, Department of EE & CS, University of Wisconsin-Milwaukee. September 1978±June 1980 MS in Computer Science, Department of EE & CS, University of Wisconsin-Milwaukee. Profes-sional background: August 1988, Now Associate Professor, Institute of CS & IE, National Chiao-Tung University. July 1986±August 1988 Assistant Professor, Department of Computer & Information Science, Fordham University. July 1984±December 1984 Doctorate Intern, Johnson Controls, Inc. August 1980±October 1981 System Program-mer, System Support Division, Milwaukee County Government Research interest: Data security & Privacy, Information & Coding Theory, Game Theory, Reliability and Performance.
Chin-Ching Chiu Ð Education: He is currently working towards his PhD degree in the Department of CS & IE, National Chiao-Tung University. September 1988±June 1991 MS in Computer Science, Department of EE & IE, Tamkang University. He received a BS degree in Computer Science from Soochow University. Professional back-ground: September 1991 Present Instructor, Department of Information Management, Tak-Mi College. April 1984±August 1991 Computer Engineer in Data Communication Institute of Directorate General of Telecommunications. October 1982±April 1984 System Analyst of SYSCOM computer company. Research interest: Reliability Analysis of Network and Distributed System.