Reconstruction of Medical Images under Different Image Acquisition Angles
20
0
0
全文
(2) 1. Introduction Compared to objected-based registration, feature-based registration is much less complex. However, in order for these methods to work, the two image stacks under consideration must have the same acquisition tilt angle and have the same anatomical location – two requirements that are not always fulfilled.. The acquisition tilt angle is often different in routine acquisition protocols among different imaging modalities. In addition, if the patient’s scans have already been acquired using a specific acquisition tilt angle, it will be costly and discomfort to rescan with the other acquisition tilt angle just to obtain different orientation image stacks for registration or physician observation.. In this paper, we present a complete solution to convert two sets of medical images acquired with different acquisition angles and anatomical cross sections into one set of images of identical scanning orientation and positions. The sequence of steps about the proposed approach is shown in Fig. 1. First, the original image acquisition parameters (including slice thickness, tile angle, and number of images) are input to simulate (reconstruct) the original image acquisition circumstance as shown in Figs. 2. The space correlation information among the two image stacks is then extracted. After that, depending on the space correlation information, such as the scan line thicknesses, the scan line tilt angle and orientation of the.
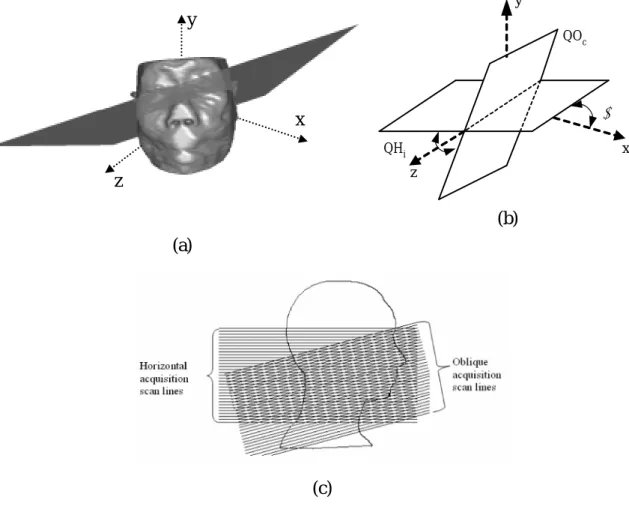
(3) image, the reconstructed gray level of pixels are computed, based on various intersection/ correlation situations.. The remainder of this paper is arranged as follows: Section 2 describes the technique of image transformation. Results of our transformation are presented in Section 3. Finally, in Section 4, conclusions and possible future extensions of the work are given.. 2. Method The purpose of image reconstruction is to convert two sets of medical images acquired with different acquisition angles (orientation) and anatomical positions into image sets of identical orientation and positions. In practical scanning, an acquisition scan plan has two degrees of freedom, a tilt angle ( θ ), which denotes the raising angle relative to horizontal plans along the x direction, and an incident angle ( δ ) which denotes the raising angle relative to horizontal plans along the z direction. A cross section image is obtained by averaging gray levels in the two sides of the acquisition scan plan within a specific range (thickness). To simplify demonstration, in following figures we will use an “acquisition scan line” to represent an acquisition scan plan. As illustrated in Fig. 2, a silhouette image shows two sets of acquisition scan lines, one denoting the horizontal axial scans (tilt angle θ = 0 o , incident angle δ = 0 o ) and the other the oblique axial scans with tilt angle θ > 0 o and incident angle δ = 0o .. It is emphasized here that any scan line in the silhouette image represents an image.
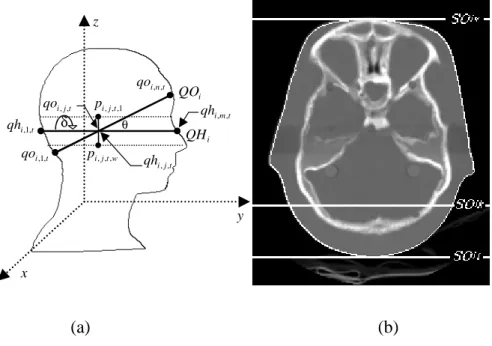
(4) scanned at a certain position of the human body, whereas a point on the scan line corresponds to a row of pixels on that image. For example, let the i-th oblique acquisition scan line, QOi in Fig. 3a be the projection of the oblique-scanned image (Fig. 3b), then the points qoi,1,t , qoi ,n,t on QOi. would be the line projections of the image rows of soi,1 , soi,v to the view of. sight as shown in Fig. 3b. The one-to-one mapping between a point on the oblique acquisition scan line in Fig. 3a and a row of pixels on the scanned image, e.g., Fig. 3b, allows one to map any image row, soi, k , to the corresponding point, qoi , j ,t , on the i-th oblique acquisition scan line according to the relationship: soik = Toi (qoi , j ,t ). (1). where Toi (qoi, j ,t ) is defined as. Toi (qoi , j ,t ) =. qoi , j ,t , qoi ,1,t qoi ,n ,t , qoi ,1,t. The qoi , j ,t , qoi ,1,t. ⋅ soi ,1 − soi ,v .. (2). is the Euclidean distance between vectors qoi , j ,t , qoi ,1,t , and |•| is the. absolute value operator. In this equation, soi ,1 , soi ,v are the nominal pixel rows on the i-th oblique axial scan image that corresponds to the points qoi , j ,t and qoi , n,t on the i-th oblique acquisition scan line. Similarly, in the case of axial scan, we can map the pixel rows of SH i , k for the i-th horizontal axial scan into points qhi , j ,t as: SH i , k = Thi (qhi , j ,t ) ,. where. (3).
(5) Thi (qhi , j ,t ) =. qhi , j ,t , qhi ,1,t qhi ,m ,t , qhi ,1,t. ⋅ shi ,l ,t − shi ,u ,t. (4). and shi ,l ,t , shi ,u ,t are the nominal pixel rows on the i-th horizontal axial image corresponding to the points qhi ,l ,t and qhi ,m ,t on the i-th horizontal acquisition scan line.. Without loss of generality, in the following discussion we assume that a set of oblique axial scanned images with a slant acquisition angle of θ , is used to reconstruct a set of horizontal axial scanned images, θ = 0 o , as illustrated in Fig. 4. In this figure, the horizontal acquisition scan line, QHi, stands for the desired horizontal axial scan, and the oblique acquisition scan line, QOs, depict the oblique axial scanned image used to reconstruct the horizontal axial scanned image.. The finite dimension of an image voxel entails that the gray. level at any point along the horizontal or oblique acquisition scan lines is an average of all points that fall within the individual slice thickness. For example, the gray level of point qhi , j ,t is an average of gray levels of the points lie on the vertical line segment between p i , j ,t ,1 and p i , j ,t , w . As a result, a direct point-by-point gray level substitution from either qo c , f ,t or qo c ,e ,t to qhi , j ,t is likely to produce abrupt intensity change, particularly at the. edge pixels where there exist a big intensity difference between the neighboring points. To alleviate this problem one would need to calculate the gray levels at p i , j ,t ,1 , p i , j ,t , w and points in between and average them out for the gray level at point qhi , j ,t . To simplify discussion, let us first assume that the oblique slice thickness is small so that the thickness.
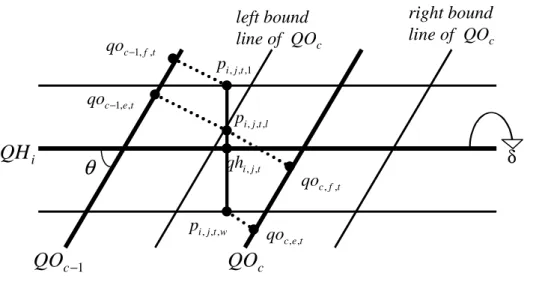
(6) line is located within the left-bound line and right-bound line of the oblique axial scan QOc . A more general case dealing with a thicker image slice is discussed in the next paragraph. Assuming that the contribution of all points within the slice thickness is identical it can therefore be recognized that the gray level of qo c , f ,t could substitute for the gray level of p i , j ,t ,1 , and the gray level of qo c ,e ,t for p i , j ,t , w . Likewise, the gray levels of the points. between p i , j ,t ,1 and p i , j ,t , w can be replaced by the gray levels of those points between qo c ,e ,t and qo c , f ,t on the oblique axial scan QOc . Once these gray levels are obtained, the. gray level at point qhi , j ,t can be easily averaged out. If the oblique axial scan thickness is too thin or the horizontal axial scan thickness is too thick, then more than one oblique axial scans are required for the reconstruction of the horizontal axial scan. The following is a discussion of all possible situations of the interaction between the horizontal and the oblique axial scans. Without loss of generality, it is assumed that only the c-1-th, c-th, and c+1-th oblique axial scans are involved in the reconstruction of the horizontal axial scans.. The interrelation between the horizontal axial scan and the oblique ones can be classified into three categories:. Case I: the oblique slice thickness is large, so is the intersection angle between the horizontal and the oblique acquisition scan lines. In this case, the thickness line of the horizontal axial image, e.g., the vertical line segment passing through point qhi , j ,t , will only.
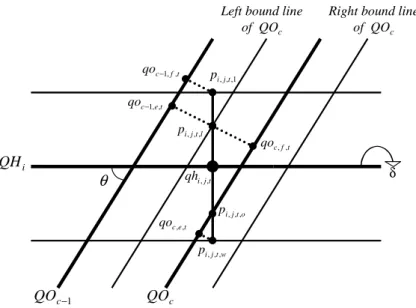
(7) intersect with one of the oblique acquisition scan line, the left or the right bound lines only. (Fig. 5). Let the projection points for pi , j ,t ,1 , p i , j ,t ,l and pi , j ,t , w be qoc −1, f ,t , qoc −1,e ,t (or qoc , f ,t ) and qoc ,e ,t , respectively. The coordinate transformations for the projection points can. be formulated as qoc −1, f ,t = ( x1 − (d − f1 cos θ ) sin θ + t cos δ , y1 − (d − f 1 cos θ ) cos θ − t sin δ ). (5). qoc −1,e ,t = ( x 2 − d sin θ + t cos δ , y 2 − d cos θ − t sin δ ). (6). qoc , f ,t = ( x 2 + d sin θ + t cos δ , y 2 + d cos θ − t sin δ ). (7). qoc ,e ,t = ( x3 + (d − f 2 cos θ ) sin θ + t cos δ , y3 + (d − f 2 cos θ ) cos θ − t sin δ ). (8). where f 1 = ( x1 − x 2 ) 2 + ( y1 − y 2 ) 2 , f 2 = ( x 2 − x3 ) 2 + ( y 2 − y 3 ) 2 and θ is the angle between. the horizontal and oblique axial scans. The projection points lying in between p i , j ,t ,1 and p i , j ,t , w can be similarly obtained. Once the mappings are established, the gray level for point qhi , j ,t can be obtained.. Case II: he oblique slice thickness and the intersection angle are both small. As a result, the horizontal scan thickness line intersects with the oblique acquisition scan line and one of the left or right bound lines. This case is illustrated in Fig. 6. Following previous rationales, we can come up with the coordinate transformations for the projection points qo c −1, f ,t , qo c −1,e ,t , qo c , f ,t and qo c ,e ,t as qoc −1, f ,t = ( x1 − (d − f1 cos θ ) sin θ + t cos δ , y1 − (d − f 1 cos θ ) cos θ − t sin δ ). (9).
(8) qoc −1,e ,t = ( x 2 − d sin θ + t cos δ , y 2 − d cos θ − t sin δ ). (10). qoc , f ,t = ( x 2 + f 2 cos θ sin θ + t cos δ , y 2 + f 2 cos θ cos θ − t sin δ ). (11). qoc ,e ,t = ( x 4 − f 3 cos θ sin θ + t cos δ , y 4 − f 3 cos θ cos θ − t sin δ ). (12). where f 3 = ( x3 − x 4 ) 2 + ( y 3 − y 4 ) 2 .. (13). Case III: The oblique slice thickness and the intersection angle are so small that the horizontal thickness line intersects with all of the oblique acquisition scan line, the left and the right bound lines (Fig. 7). In this case the coordinate transformations for the projection points qo c −1, f ,t , qo c −1,e ,t , qo c , f ,t , qo c ,e ,t , qo c +1, f ,t and qo c +1,e ,t become: qoc −1, f ,t = ( x1 − (d − f1 cos θ ) sin θ + t cos δ , y1 − (d − f 1 cos θ ) cos θ − t sin δ ). (14). qoc −1,e ,t = ( x 2 − d sin θ + t cos δ , y 2 − d cos θ − t sin δ ). (15). qoc , f ,t = ( x 2 + f 2 cos θ sin θ + t cos δ , y 2 + f 2 cos θ cos θ − t sin δ ). (16). qoc ,e ,t = ( x 4 − f 3 cos θ sin θ + t cos δ , y 4 − f 3 cos θ cos θ − t sin δ ). (17). qoc +1, f ,t = ( x 4 + d sin θ + t cos δ , y 4 + d cos θ − t sin δ ). (18). qoc +1,e ,t = ( x5 + (d − f 4 cos θ ) sin θ + t cos δ , y 5 + (d − f 4 cos θ ) cos θ − t sin δ ). (19). where f 4 = ( x 4 − x5 ) 2 + ( y 4 − y5 ) 2 . If the oblique slice thickness is very thin and/or if the angle between the horizontal and oblique axial scan is small, then more than three oblique axial scans may be involved in the.
(9) reconstruction of the horizontal axial image. Assuming that the calculation of the gray level at point qhi , j ,t is dependent on the l-th to the r-th oblique axial scans, and let the influential points at the n-th oblique axial image be qo n ,e ,t ~ qo n, f ,t , then qhi , j ,t ’s gray level can be determined according to: r 1 I h ( x, Thi (qhi , j ,t )) = ∑ n =l f −e. f. ∑I k =e. o. ( x, To n (qo n ,k ,t )) . for x = 1,..., N t = 1,..., N. (20). where Thi (qhi , j ,t ) follows from Eq. (4), I h ( x, Thi (qhi , j ,t )) denotes the gray level at pixel ( x, Thi (qhi , j ,t )) on the i-th simulated horizontal axial image. To n (qo n , k ,t ) is obtained from. Eq. (2) that resolves the image row on the oblique axial image corresponding to qo n, k ,t . I o ( x, Thn (qo n , k ,t )) denotes the gray level at pixel ( x, To n (qo n, k ,t )) on the n-th oblique axial. image. Equation (29) therefore stands for the summation of the normalized gray levels from the influential pixels over the total involved oblique axial scans.. 3. Experimental Results. In this experiment we set out to test our proposed image transformation technique. We have acquired two sets of CT images of a phantom, one is the horizontal axial scan (33 images) and the other the oblique axial scan with θ = −15ο acquisition angle (32 images). According to what was introduced in Section 2, we transform the set of oblique images to horizontal ones and compared the results to the acquired horizontal images (Figs. 8, 9). Figures (8a, 9a) are.
(10) two scanned horizontal CT slices and Figs. (8b, 9b) are the transformed ones. A direct subtraction of the corresponding image pairs reveals the difference after applying our transformation technique (Figs. 8c, 9c). It can be seen that the difference is small in general and the significant ones are mostly occurred at tissue boundaries. This is because during transformation, we have assumed the gray levels are identical for those pixels within the thickness line of the oblique images. This assumption poses no threats to most regions that are homogeneous in nature but will result larger variations at regions that have large intensity variations, such as those at the boundaries. Nevertheless, these differences are small in scale compared to the original image intensities.. For objective evaluation, a quantitative evaluation of the difference is as follows. Consider the normalized square sum of the gray levels, D, in the transformed and true scanned images D=. Ed ( I 1 , I 2 ) E ( I1 ) ⋅ E ( I 2 ). (21). where I1 is the transformed image intensity; I 2 is the true scanned image intensity. The energy, E (I ) , of an image I is determined as N. N. E ( I ) = ∑∑ ( I ( x, y )) 2 .. (22). x =1 y =1. and Ed ( I1, I 2 ) is the square sum of the gray level difference between images I1 and I 2 . i.e., N. N. Ed ( I 1 , I 2 ) = ∑∑ ( I 1 ( x, y ) − I 2 ( x, y )) 2 x =1 y =1. (23).
(11) where N × N is the image dimension. D is bounded between 0 and 1, and the larger D the larger the difference, and vice versa. Table 1 shows the calculated D values in the range between 0.03 to 0.11, with a mean of 0.06. These small values prove the effectiveness of the proposed technique.. Table 1 the variance between obtained transformation image and truth horizontal axial image Set D. 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. average. 0.0306 0.0465 0.1018 0.0665 0.0312 0.0479 0.0506 0.1092 0.0761 0.0365 0.0603. 4. Conclusion. Integration of multi-modality medical images to improve diagnosis accuracy has been a major trend in current clinical diagnosis applications. Prior feature-based registration methods were based on the assumptions that the to-be registered images were captured with the same acquisition tilt angle and at the same body position, but neither assumption can be guaranteed. In this paper, we propose a technique that reconstructs two sets of medical images acquired with different acquisition angles and anatomical cross sections into one set of images of identical scanning orientation and positions. The space correlation information among the two image stacks is first extracted and is used to correct the tilt angle and anatomical position differences found in the image stacks. Satisfactory reconstruction results were presented to.
(12) prove our method.. Reference. [1] V. R. Mandava, J. M. Fitzpatrick, C. R. Maurer, Jr., R. J. Maciunas, and G. S. Allen, ”Registration of multimodal volume head images via attached markers,” Medical Imaging VI: Image Processing, Vol. Proc. SPIE 1652, pp. 271-282, 1992. [2] J. West, J. M. Fitzpartrick, M Y. Wang, B. M. Dawant, C. R. Maurer, R. M. Kessler, and R. J. Maciunas, “Retrospective intermodality registration techniques for images of the head: surface-based versus volume-based,” IEEE Trans. Med. Imag., vol. 18, pp.144-150, Feb. 1999. [3] P. F. Hemler, T. S. Sumanaweera, P. A. van den Elsen, S. Napel, and J. R. Adler,. “A. versatile system for multimodality image fusion,” J. Image Guid. Surg., vol. 1, pp. 35-45, 1995. [4] D. Lemoine, D. Liegeard, E. Lussot, and C. Barillot, “Multimodal registration system for the fusion of MRI, CT, MEG, and 3D or stereotactic angiographic data,” Medical Imaging 1994: Image Capture, Formatting, and Display, vol. 2164, pp. 46-56, 1994. [5] C. A. Pelizzari, G. T. Y. Chen, D. R. Spelbring, R. R. Weichselbaum, and C.-T. Chen, “Accurate three-dimensional registration of CT, PET, and/or MR images of the brain,” J. Comput. Assist. Tomogr., vol. 13, pp. 20-26, 1989. [6] J. B. Antoine Maintz, P. A. van den Elseb, and Max A. Viergever, “Evaluation of ridge seeking operators for multimodality medical image matching,” IEEE Trans. Pattern Analysis Machine Intell., vol. 18, pp.353-365, April 1996. [7] J. B. A. Maintz, P. A. van den Elsen, and M. A. Viergever, “Comparison of feature-based matching of CT and MR brain images,” in Computer Vision, Virtual Reality, and Robotics in Medicine 1995, N. Ayache, Ed. Berlin, Germany: Springer-Verlag, 1995, pp. 219-228..
(13) [8] R. P. Woods, S. R. Cherry, and J. C. Mazziotta, “Rapid automated algorithm for aligning and reslicing PET images,” J. Comput. Assist. Tomogr., vol. 16, pp. 620-633, 1992. [9] R. P. Woods, J. C. Mazziotta, and S. R. Cherry, “MRI-PET registration with automated algorithm,” J. Comput. Assist. Tomogr., vol. 17, pp. 536-546, 1993. [10] Calvin R. Maurer; Georges B. Aboutanos; Benoit M. Dawant; Robert J. Maciunas; J. Michael Fitzpatrick, “Registration of 3-D images using weighted geometrical features,” IEEE Trans. Med. Imag., vol. 15, pp. 836-849, Dec. 1996. [11] Ingrid Carlbom; Denetri Terzopoulos; Kristen M. Harris, “Computer-assisted registration, segmentation, and 3D reconstruction from images of neuronal tissue sections,” IEEE Trans. Med. Imag., vol. 13, pp. 351-362, Jun. 1994..
(14) Input the Image Acquisition Parameters. Simulate Image Acquisition. Evaluate Image Intersection. Calculate Pixel Influence. Generate a New Image. Figure 1 The sequence of steps about the proposed approach y. y. QOc. δ. x QHi z. z. x. θ. (b) (a). (c). Figure 2 The silhouette image showing horizontal and oblique acquisition scan lines..
(15) z. qoi ,n ,t qhi ,1,t. qoi , j ,t δ. qoi ,1,t. pi , j ,t ,1 θ. pi , j ,t ,w. QOi qhi ,m ,t QH i. qhi , j ,t. y. x. (a). (b). Figure 3 (a) Schematic diagram showing the intersection points of the i-th horizontal acquisition scan line, QH i , the i-th oblique acquisition scan lines, QO i , to the skull boundary, qhi ,1,t , qhi ,m,t , qoi ,l ,t and qoi ,n ,t , respectively. Dotted lines above and below QH i reveal the thickness of the horizontal slice. (b) The oblique-scanned image that. constituted the QO i ..
(16) oblique slice QOα. .... .... pi , j ,t ,1 qoc , f ,t. qhi ,1,t. Horizontal slice QHi. QOβ. QOc. qhi , j ,t. θ. qhi ,m ,t. qoc ,e ,t. δ. horizontal slice thickness. pi , j ,t ,w. oblique slice thickness. Figure 4 Schematic diagram showing that a set of oblique axial scanned images with a slant acquisition angle of θ , is used to reconstruct a set of horizontal axial scanned images.. qoc −1, f ,t. left bound line of QOc pi , j ,t ,1. qoc −1,e ,t. QH i. θ. pi , j ,t ,l qhi , j ,t pi , j ,t ,w. QOc −1. right bound line of QOc. δ qoc , f ,t qoc ,e ,t. QOc. Figure 5 Schematic diagrams showing that the horizontal thickness line intersect with the left bound lines only..
(17) Left bound line of QOc qoc −1, f ,t. Right bound line of QOc. pi , j ,t ,1. qoc −1,e ,t pi , j ,t ,l. QH i. θ. qoc , f ,t. δ. qhi , j ,t qoc ,e ,t. pi , j ,t ,o pi , j ,t ,w. QOc −1. QOc. Figure 6 Schematic diagrams showing that the horizontal thickness line crosses over the oblique acquisition scan line, QO c , and the left bound line but does not intersect the right bound line..
(18) left bound line of QOc qoc −1, f ,t. pi , j ,t ,1. qoc −1,e ,t. pi , j ,t ,l qoc , f ,t. pi , j ,t ,o. QH i. θ. pi , j ,t ,w. QOc. δ. qhi , j ,t qoc ,e ,t pi , j ,t ,r. QOc −1. right bound line of QOc. qoc +1,e ,t. qoc +1, f ,t. QOc +1. Figure 7 When the oblique slice thickness and/or the intersection angle further decreases, the axial thickness line would eventually crosses over all of the oblique slice line, the left and the right bound lines. In this case, the pixel intensity at qhi , j ,t would need to be calculated from three oblique slices of QOc−1 , QOc and QOc +1 ..
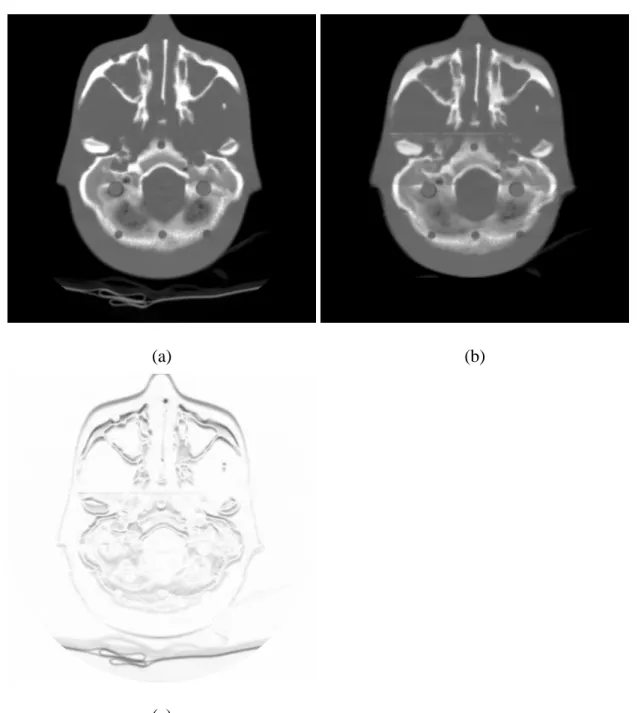
(19) (a). (b). (c) Figure 8 Comparison of a true horizontal axial scan CT image (a) and a transformed one (b) that was obtained from a set of oblique-scanned images. The difference between the two images is shown in (c) where its intensity is comparatively small and mostly occurred at the tissue boundaries..
(20) (a). (b). (c) Figure 9 As in Fig. 8, the true horizontal axial scan CT image (a), the transformed image (b) and the difference image (c) at a different slice position is displayed..
(21)
數據

+4

相關文件
You are given the wavelength and total energy of a light pulse and asked to find the number of photons it
Wang, Solving pseudomonotone variational inequalities and pseudocon- vex optimization problems using the projection neural network, IEEE Transactions on Neural Networks 17
volume suppressed mass: (TeV) 2 /M P ∼ 10 −4 eV → mm range can be experimentally tested for any number of extra dimensions - Light U(1) gauge bosons: no derivative couplings. =>
Define instead the imaginary.. potential, magnetic field, lattice…) Dirac-BdG Hamiltonian:. with small, and matrix
incapable to extract any quantities from QCD, nor to tackle the most interesting physics, namely, the spontaneously chiral symmetry breaking and the color confinement..
Estimated resident population by age and sex in statistical local areas, New South Wales, June 1990 (No. Canberra, Australian Capital
Consistent with the negative price of systematic volatility risk found by the option pricing studies, we see lower average raw returns, CAPM alphas, and FF-3 alphas with higher
The Vertical Line Test A curve in the xy-plane is the graph of a function of x if and only if no vertical line intersects the curve more than once.. The reason for the truth of
