Volume 2013, Article ID 636484,11pages http://dx.doi.org/10.1155/2013/636484
Research Article
Discrete Particle Swarm Optimization with Scout
Particles for Library Materials Acquisition
Yi-Ling Wu,
1Tsu-Feng Ho,
2Shyong Jian Shyu,
2and Bertrand M. T. Lin
11Institute of Information Management, National Chiao Tung University, Hsinchu 30010, Taiwan
2Department of Computer Science and Information Engineering, Ming Chuan University, Taoyuan 33348, Taiwan Correspondence should be addressed to Tsu-Feng Ho; [email protected]
Received 3 June 2013; Accepted 10 July 2013
Academic Editors: S. Balochian, V. Bhatnagar, and Y. Zhang
Copyright © 2013 Yi-Ling Wu et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Materials acquisition is one of the critical challenges faced by academic libraries. This paper presents an integer programming model of the studied problem by considering how to select materials in order to maximize the average preference and the budget execution rate under some practical restrictions including departmental budget, limitation of the number of materials in each category and each language. To tackle the constrained problem, we propose a discrete particle swarm optimization (DPSO) with scout particles, where each particle, represented as a binary matrix, corresponds to a candidate solution to the problem. An initialization algorithm and a penalty function are designed to cope with the constraints, and the scout particles are employed to enhance the exploration within the solution space. To demonstrate the effectiveness and efficiency of the proposed DPSO, a series of computational experiments are designed and conducted. The results are statistically analyzed, and it is evinced that the proposed DPSO is an effective approach for the studied problem.
1. Introduction
In recent years, the price inflation of library materials, the shrinking of library budget, and the growth of electronic resources continue to challenge the acquisition librarians [1]. Complicating the effects of these challenges is the growth of scholarly and popular publications. With the great increase in publications, the librarians have not only to acquire the latest and the preferred materials within the limited budget but also to take the collection policy into consideration. Walters [2] reports that the annual inflation rate of academic books and periodicals were 1.4 and 8.5 percent. The research planning and review committee of the Association of College and Research Libraries (ACRL) [3] develops the 2010 top ten trends in academic libraries and finds that many libraries will face the budget pressure in the near future. These reaffirm the fact that the materials acquisition problem is exacerbated by the difficulty of aligning the library offerings with patron needs under the budget pressure.
Over the past few decades, researches on materials acquisition have been conducted and implemented with a number of operations research based models and approaches.
Beilby and Mott Jr. [4] develop a linear goal programming model for acquisition planning of academic libraries, and incorporate with multiple collection development goals such as acquiring an adequate number of titles (at least 7,500 but not more than 10,500 titles), not exceeding the total acquisition budget ($200,000), and/or limiting periodical expenditures to 60% of the total acquisition expenditures. Wise and Perushek [5] introduce another model that takes into account more goals, like reaching the minimum limit for each subject fund, not surpassing the maximum limit for each subject fund, and so forth. Later, Wise and Perushek [6] not only address an important claim that the suggestions of collection development librarians and faculties must be taken into consideration but also elaborate another model to reflect the opinion of librarians and faculties. Ho et al. [7] present a model that maximizes the average preference of patrons subject to both the acquisition cost and the number of materials in each category.
In most of the cases, academic libraries are positioned to acquire materials for multiple departments, for example, Science, Business, Engineering, and so forth, within the budget of each department. Goyal [8] proposes an operations
research model of funds allocation to different departments of a university. The objective of this model is to maximize the total social benefits conveyed by the funds exercised for the purchase of materials among all departments, and the constraints of this model are the lower and upper limits of fund for each department and the total funds available. Arora and Klabjan [9] point out the critical concern about fairness in materials acquisition of academic libraries. They provide a model for maximizing the usage in the future time period subject to the bounds on the number of materials of each category and the lower and the upper bounds on the budgets of the library units. Existing researches on materials acquisition assume a single total budget or multiple department budgets. This study will investigate the scenario where each individual department has its own budget limit for the preferred materials that are to be acquired. This type of budget plan will introduce financial constraints that are much more complicated.
From the viewpoint of acquisition staffs, it is question-able if the patrons are satisfied with the decision outcome. Niyonsenga and Bizimana [10] indicate various factors related to the patron satisfactions with academic libraries services, such as a list of new acquisitions, lending services, serial collection. In this paper, we adopt the patron preferences of acquisitions to reflect the patron satisfactions. To allocate the budget as fairly as possible, we assume that the preferences are obtained from the patrons of all departments due to the different interests of the departments. Besides, a low budget execution rate may lead to a budget cut in the next fiscal year. Librarians sometimes are on the horns of a dilemma whether to purchase the less preferred materials or cause a low budget execution rate. Therefore, we concentrate on how to select materials to be acquired in order to maximize the average preference as well as the budget execution rate under the real-world restrictions including departmental budget and limitation of the number of materials in each category.
In the view of computational complexity, the materials acquisition problem is a generalized version of the knapsack problem which is known to be computationally intractable [11]. In other words, it is extremely time consuming and even unlikely to find an optimal solution when the problem size is large. By far, metaheuristics, such as genetic algorithm, ant colony optimization, and particle swarm optimization are successfully applied to cope with many hard optimiza-tion problems with impressive performances in obtaining solutions with in an effective and efficient way [12,13]. This paper is devoted to tackling the studied problem by particle swarm optimization (PSO) that has earned a good reputation by the trustworthy merits including simplicity, efficiency, and effectiveness in producing quality solutions [14, 15]. Furthermore, to avoid premature convergence, we introduce a discrete particle swarm optimization with scout particles, introduced by Silva et al. [16], to enhance the exploration capability of the adopted swarms.
The rest of this paper is organized as follows. InSection 2, a mathematical model of the materials acquisition problem with departmental demands is proposed and followed by a greedy algorithm.Section 3presents the fundamental con-cept and structure of the discrete particle swarm optimization
(DPSO). In Section 4, we depict how the proposed DPSO with scout particles is tailored for the characteristics of the studied problem. A computational study is carried out to examine the performances of the proposed solution approaches. Our experimental settings and results of DPSO are presented inSection 5. We summarize the results of this study and give some concluding remarks inSection 6.
2. Problem Statements and Greedy Algorithm
A formal specification of the materials acquisition problem is presented in this section. Then, an integer programming model is developed to formulate the problem considered in a mathematical way.
2.1. Problem Specification. Consider a set of𝑛 materials to be
acquired and a set of𝑚 departments. Each material is associ-ated with a cost𝑐𝑖and a preference value𝑝𝑖𝑗recommended by each department 𝑗 for 1 ≤ 𝑖 ≤ 𝑛 and 1 ≤ 𝑗 ≤ 𝑚. Each department owns an amount𝐵𝑗 of budget for1 ≤ 𝑗 ≤ 𝑚. Since one material may be recommended by more than one department, the acquisition cost would be apportioned by these recommending departments in proportion to their preferences. For instance, if a material with cost 100 is acquired to meet the recommendations from two depart-ments𝑗 and 𝑗with preferences 0.9 and 0.6, then departments 𝑗 and 𝑗 should pay 40 (= 100 × (0.9/(0.9 + 0.6))) and 60
(= 100 × (0.6/(0.9 + 0.6))), respectively, from their budgets 𝐵𝑗 and𝐵𝑗. We denote the actual expense by department𝑗
for material 𝑖 as 𝑒𝑖𝑗. To meet the acquisition requirements from various departments,𝑞 written languages (e.g., English, Japanese, Chinese, etc.) and𝑟 classified categories (e.g., Art, Science, Design, etc.) are considered such that the amount of materials belongs to a certain language and a specific category may be restricted into a range. In addition, the authority would expect the remainder of budget𝐵𝑗, once granted, for department𝑗 to be the less the better after allocation. We thus define the execution rate to be the actual expenses of all departments divided by the budget of all departments.
The decision is to determine which materials should be acquired and which departments should cover the cost associated with these materials under the constraints of departmental budgets and the limitation of the amounts in each written language and each category. The objective is to maximize the combination of the average preference and the budget execution rate.
InTable 1, we summarize the notations that will be used in the integer programming model throughout the paper.
2.2. Problem Formulation. The materials acquisition problem
is mathematically formulated as the following integer pro-gramming model: maximize 𝑂 (𝑥) = 𝜌 × (∑ 𝑚 𝑗=1(∑𝑛𝑖=1𝑥𝑖𝑗𝑝𝑖𝑗/ ∑𝑛𝑖=1𝑥𝑖𝑗) 𝑚 ) + (1 − 𝜌) (∑ 𝑛 𝑖=1∑𝑚𝑗=1𝑥𝑖𝑗𝑒𝑖𝑗 ∑𝑚𝑗=1𝐵𝑗 ) (1)
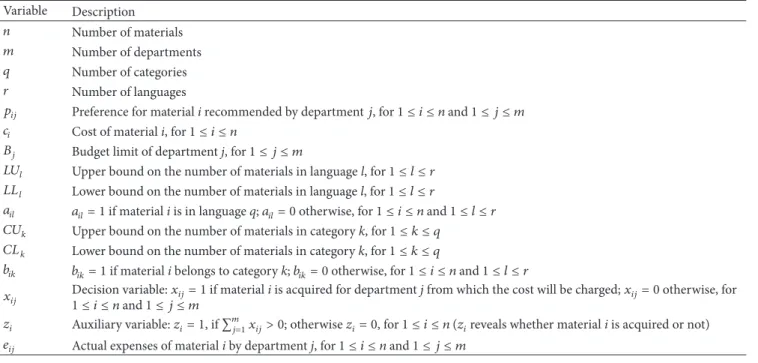
Table 1: Notations. Variable Description 𝑛 Number of materials 𝑚 Number of departments 𝑞 Number of categories 𝑟 Number of languages
𝑝𝑖𝑗 Preference for material i recommended by department𝑗, for 1 ≤ 𝑖 ≤ 𝑛 and 1 ≤ 𝑗 ≤ 𝑚 𝑐𝑖 Cost of material i, for1 ≤ 𝑖 ≤ 𝑛
𝐵𝑗 Budget limit of department j, for1 ≤ 𝑗 ≤ 𝑚
𝐿𝑈𝑙 Upper bound on the number of materials in language l, for1 ≤ 𝑙 ≤ 𝑟 𝐿𝐿𝑙 Lower bound on the number of materials in language l, for1 ≤ 𝑙 ≤ 𝑟
𝑎𝑖𝑙 𝑎𝑖𝑙= 1 if material i is in language q; 𝑎𝑖𝑙= 0 otherwise, for 1 ≤ 𝑖 ≤ 𝑛 and 1 ≤ 𝑙 ≤ 𝑟
𝐶𝑈𝑘 Upper bound on the number of materials in category k, for1 ≤ 𝑘 ≤ 𝑞
𝐶𝐿𝑘 Lower bound on the number of materials in category k, for1 ≤ 𝑘 ≤ 𝑞
𝑏𝑖𝑘 𝑏𝑖𝑘= 1 if material i belongs to category k; 𝑏𝑖𝑘= 0 otherwise, for 1 ≤ 𝑖 ≤ 𝑛 and 1 ≤ 𝑙 ≤ 𝑟
𝑥𝑖𝑗 Decision variable:1 ≤ 𝑖 ≤ 𝑛 and 1 ≤ 𝑗 ≤ 𝑚𝑥𝑖𝑗= 1 if material i is acquired for department j from which the cost will be charged; 𝑥𝑖𝑗= 0 otherwise, for
𝑧𝑖 Auxiliary variable:𝑧𝑖= 1, if ∑𝑚𝑗=1𝑥𝑖𝑗> 0; otherwise 𝑧𝑖= 0, for 1 ≤ 𝑖 ≤ 𝑛 (𝑧𝑖reveals whether material i is acquired or not)
𝑒𝑖𝑗 Actual expenses of material i by department j, for1 ≤ 𝑖 ≤ 𝑛 and 1 ≤ 𝑗 ≤ 𝑚
subject to 𝑒𝑖𝑗≥ ( 𝑥𝑖𝑗𝑝𝑖𝑗 ∑𝑚̂𝑗=1𝑥𝑖̂𝑗𝑝𝑖̂𝑗) × 𝑐𝑖 for1 ≤ 𝑖 ≤ 𝑛, 1 ≤ 𝑗 ≤ 𝑚, (2) 𝑛 ∑ 𝑖=1 𝑒𝑖𝑗≤ 𝐵𝑗 for 1 ≤ 𝑗 ≤ 𝑚, (3) 𝑛 ∑ 𝑖=1 𝑥𝑖𝑗− 𝑧𝑖𝑀 ≤ 0 for 1 ≤ 𝑖 ≤ 𝑛, (4) 𝑛 ∑ 𝑖=1 𝑥𝑖𝑗+ (1 − 𝑧𝑖) 𝑀 > 0 for 1 ≤ 𝑖 ≤ 𝑛, (5) 𝑛 ∑ 𝑖=1𝑧𝑖𝑎𝑖𝑙≤ 𝐿𝑈𝑙 for 1 ≤ 𝑙 ≤ 𝑟, (6) 𝑛 ∑ 𝑖=1 𝑧𝑖𝑎𝑖𝑙≥ 𝐿𝐿𝑙 for1 ≤ 𝑙 ≤ 𝑟, (7) 𝑛 ∑ 𝑖=1 𝑧𝑖𝑏𝑖𝑘≤ 𝐶𝑈𝑘 for1 ≤ 𝑘 ≤ 𝑞, (8) 𝑛 ∑ 𝑖=1 𝑧𝑖𝑏𝑖𝑘≥ 𝐶𝐿𝑘 for 1 ≤ 𝑘 ≤ 𝑞. (9) The objective function (1) is to maximize the weighted sum of the average preference and the budget execution rate, where𝜌, 0 ≤ 𝜌 ≤ 1, is a parameter controlling the degree of importance between these two terms. The actual expense of material 𝑖 apportioned by department 𝑗 (𝑒𝑖𝑗) is given in constraints (2), where all the cost of materials
will be apportioned according to the proportion of the preference (𝑝𝑖𝑗). Constraints (3) confine that the expense of any department𝑗 do not exceed its budget (𝐵𝑗). To ease the amount computation of the acquired materials, we introduce an auxiliary variable 𝑧𝑖, which is 1 (0) if ∑𝑚𝑗=1𝑥𝑖𝑗 > 0 (otherwise), to show whether material𝑖 is acquired or not. Using a sufficiently large positive number𝑀, constraints (4) and (5) are deliberately designed to obtain the proper value of 𝑧𝑖. If ∑𝑚𝑗=1𝑥𝑖𝑗 ≤ 0, constraint (4) becomes irrelevant, where 𝑧𝑖 may be either 0 or 1, but constraints (5) pledge 𝑧𝑖= 0, which indicates that material 𝑖 is not acquired. On the contrary (∑𝑚𝑗=1𝑥𝑖𝑗> 0), constraints (5) would be redundant, yet constraint (4) promises𝑧𝑖= 1, which means that material 𝑖 is acquired. If the material 𝑖 is acquired (𝑧𝑖 = 1); then constraints (6) and (7) will force the number of acquired materials in each language𝑙 to be larger than or equal to the lower bounds and not to exceed the upper bounds. If material 𝑖 is not acquired (𝑧𝑖 = 0), constraints (6) and (7) will assure the number of acquired materials in each language𝑙 included no material𝑖. Constraints (11) and (12) are similarly defined to abide by the lower bound and upper bound specified on the number of materials in each category𝑘.
2.3. Greedy Algorithm. A greedy solution method, denoted by
Algorithm Greedy as shown in theAlgorithm 1, is designed to be the comparison counterpart for other approaches. First, to decide if each material𝑖 will be acquired or not, all the materi-als are sorted in nonincreasing order of the ratio(∑𝑚𝑗=1𝑝𝑖𝑗)/𝑐𝑖. We thus assume the materials are reindexed in accordance with this sequencing rule. The first material, the one that attains the maximum(∑𝑚𝑗=1𝑝𝑖𝑗)/𝑐𝑖 ratio, will be considered if the following two conditions are satisfied:(1) the upper bound on the number of languages𝐿𝑈𝑙is not exceeded, and (2) the upper bound on the number of categories 𝐶𝑈𝑘 is
Algorithm Greedy:
Sort all materials in nonincreasing order of the ratio(∑𝑚𝑗=1𝑝𝑖𝑗)/𝑐𝑖;
for 𝑖 := 1 to 𝑛 do
while (the upper bound on the number of materials in language 𝐿𝑈𝑙is not exceeded,1 ≤ 𝑙 ≤ 𝑟)
while (the upper bound on the number of materials in category 𝐶𝑈𝑘is not exceeded,1 ≤ 𝑘 ≤ 𝑞)
Sort the departments that propose material𝑖 in nonincreasing order of 𝑝𝑖𝑗 Let (𝑗1, 𝑗2, . . . , 𝑗𝑚) be the sorted sequence;
for 𝑗 := 1 to 𝑚 do
if (budget 𝐵𝑗is not exhausted)
Set𝑥𝑖𝑗= 1
endfor
Calculate the residual budget of all departments𝑗 with 𝑥𝑖𝑗= 1 by deducing the apportioned cost of material𝑖.
endwhile endwhile endfor
Algorithm 1: Greedy solution method.
not exceeded. Next, to determine which departments will apportion the cost of material𝑖, all departments are sorted in nonincreasing order of𝑝𝑖𝑗, and let (𝑗1, 𝑗2, . . . , 𝑗𝑚) be the sorted list. Material𝑖 will be acquired by department 𝑗 (𝑥𝑖𝑗= 1), if the budget of this department is not exceeded.
3. Related Works of PSO
This section presents an overview on particle swarm opti-mization and describes two widely used topologies. What follows is a review on how to handle constraints and how to avoid premature convergence.
3.1. PSO. Particle swarm optimization (PSO) [14],
intro-duced by Kennedy (a social psychologist) and Eberhart (an electrical engineer) in 1995 as an optimization method, is inspired by the observation on behavior of flocking birds and schooling fish. With the simplicity and lessened computa-tion loads, PSO has been widely applied to many research areas, such as clustering and classification, communication networks, and scheduling [15,17–19].
In foraging, birds flock together and arrange themselves in specific shapes or formations by sharing their information about food sources. The movement of each particle will be influenced by the experiences of itself and the peers. In the process of optimization, each particle𝑠 of flock 𝑆 is associated with a position, a velocity, and a fitness value. A position, which is a vector in a search space, represents a potential solution to an optimization problem; a velocity, which is a vector, represents a change in the position; a fitness value, which is computed by the objective function, indicates how well the particle solves the problem.
To find an approximate solution, each particle𝑠 deter-mines its movement iteratively by learning from its own experience and communication with its neighbors. The mechanism of coordination is encapsulated by the velocity
control over all particles at each iteration𝑡 of the algorithm.
For each particle𝑠, the velocity at iteration 𝑡 + 1 (𝑉𝑠𝑡+1) is updated with (10), where𝑃𝑠𝑡denotes the solution found by (position of) particle 𝑠 at iteration 𝑡, 𝑃𝑡𝑠 denotes the best solution found by particle𝑠 until iteration 𝑡, and ̂𝑃𝑠𝑡denotes the best solution found by the neighbors of particle 𝑠. The
cognition learning rate (𝑐1) and social learning rate (𝑐2) are introduced to control the influence of individual experience and their neighbors’ experience, respectively. At the next iteration𝑡 + 1, the position of each particle is updated by (11). One has
𝑉𝑠𝑡+1= 𝑉𝑠𝑡+ 𝑐1𝑟1(𝑃𝑡𝑠− 𝑃𝑠𝑡) + 𝑐2𝑟2(̂𝑃𝑠𝑡− 𝑃𝑠𝑡) , (10)
𝑃𝑠𝑡+1= 𝑃𝑠𝑡+ 𝑉𝑠𝑡+1. (11) For discrete optimization problems, Kennedy and Eber-hart [20] also introduce a binary particle swarm optimization that changes the concept of velocity from adjustment of the position to the probability that determines whether a bit of a solution becomes one or zero. The velocity of each particle𝑠 at iteration𝑡, 𝑉𝑠𝑡+1, is squashed in sigmoidal function as shown in (12); the position updating function is replaced by (13), where rand() is a random number drawn from the interval [0, 1]. One has 𝑆 (𝑉𝑠𝑡+1) = 1 1 + 𝑒−(𝑉𝑡+1 𝑠 ), (12) 𝑃𝑠𝑡+1= {1 if rand () < 𝑆 (𝑉𝑠𝑡+1) , 0 otherwise, (13)
To better balance the exploration and exploitation, sev-eral variants of PSO algorithm have been proposed in the literature. A widely used method, proposed by Eberhart and Shi [21], is to introduce an inertia weight (𝑤) to the velocity
to adjust the influence of the current velocity on the new velocity:
𝑉𝑠𝑡+1= 𝑤𝑉𝑠𝑡+ 𝑐1𝑟1(𝑃𝑡𝑠− 𝑃𝑠𝑡) + 𝑐2𝑟2(̂𝑃𝑠𝑡− 𝑃𝑠𝑡) . (14)
3.2. Communication Topology. In the literature, several
com-munication topologies have been extensively studied. Poli et al. [22] classify the communication structures into two categories: static topologies and dynamic topologies. Static topologies are that the number of neighbors does not change at all iterations of a run; dynamic topologies, on the other hand, are that the size of neighborhoods dynamically increases.
Local topology, global topology, and von Neumann topology are some well-known examples of static topology. As for dynamic topologies, the neighborhood size can be influenced by a dynamic hierarchy, a fitness distance ratio, or a randomized connection, just to name a few. The canonical PSO algorithm, proposed by Bratton and Kennedy [23], is equipped with global and local topologies.
A PSO with a global topology (or gbest topology) allows each particle to communicate with all other particles in the swarm, while a PSO with a local topology (or lbest topology) allows each particle to share information with only two other particles in the swarm. Therefore, a gbest PSO could lead to a faster convergence but might be trapped into a local optimal solution. Conversely, an lbest PSO could result in a slower rate of convergence but might be able to escape from a local optimal.
3.3. Constraint Handling. As reported in the literature, there
are various different methods for handling constrained opti-mization problems. Several commonly used methods are based on penalty functions, rejection of infeasible solutions, repair algorithm, specialized operators, and behavioral mem-ory [24–26]. In this paper, we focus on the method based on penalty function. Details concerning the penalty function for the studied problem are given in the next section.
When implementing penalty functions, the fitness eval-uation for a solution is not just dependent on the objective function but incorporated the penalty function with the objective function. This method can be implemented as stationary or nonstationary. If there is an infeasible solu-tion, the stationary penalty function simply adds a fixed penalty. Contrary to the stationary one, the nonstationary function adds a floating penalty which changes the penalty value according to the violated constrains and the iterations number. Parsopoulos and Vrahatis [25] note that the results obtained by nonstationary penalty functions are superior to the stationary one for the most of the time. A high penalty leads to a feasible solution even it is not approximate to the optimal solution, while a low penalty reduces the probability to obtain a feasible solution. Therefore, Coath and Halgamuge [24] point out that a fine-tuning of the parameters in the penalty function is necessary when using this method. The method based on the rejection of infeasible solution is to discard an infeasible solution even if it is closer to the optimal solution than some feasible ones. The repair algorithm, an
extensively employed method in genetic algorithms (GA), is equipped to fix an infeasible solution, but the cost is more computationally expensive than other methods.
3.4. Avoiding Premature Convergence. Most of the global
optimization methods suffer from premature convergence. One of the most used approaches to tackle this problem is to introduce diversity to the velocity or the position of a particle. As mutation operators are to the genetic algorithm, so is introduction of diversity to PSO algorithms. The focus of this paper is to introduce the diversity by employing scout particles. The details of how the proposed DPSO algorithm circumvents premature convergence are described inSection 4.
Garc´ıa-Villoria and Pastor [27] introduce the concept of diversity into the velocity updating function. The proposed dynamic diversity PSO (PSO-c3dyn) dynamically changes the diversity coefficients of all particles through iterations. The more heterogeneity of the population will be, the less diversity will be introduced to the velocity updating function, and vice versa. Blackwell and Bentley [28] incorporate diversity into the population by preventing the homogeneous particles from clustering tightly to each other in the search space. They provide collision-avoiding swarms that reduce the attraction of the swarm center and increase the coverage of a swarm in the search space. Silva et al. [16] attempt to apply the diversity to both the velocity and the population by a predator particle and several scout particles. A predator particle is intended to balance the exploitation and exploration of the swarm, while scout particles are designed to implement different exploration strategies. The closer the predator particle will be to the best particle, the higher probability of perturbation will be.
4. DPSO with Scout Particles
This section details how to tackle the materials acquisition problem by discrete particle swarm optimization with scout particles. The representation of a particle and the initial-ization method for the studied problem are described in
Section 4.1. Then,Section 4.2elaborates on the details of pre-venting premature convergence by deploying scout particles.
Section 4.3redefines a constraints handling mechanism for solving the constrained optimization problem.
4.1. Representation and Initialization. The solution of
materi-als acquisition problem with𝑛 materials and 𝑚 departments obtained by particle𝑠 at iteration 𝑡 can be represented by an 𝑛 × 𝑚 binary matrix, proposed by Wu et al. [29], as shown in (15). Each entry of the matrix (𝑃𝑠𝑡)𝑖𝑗 indicates whether material𝑖 is acquired by department 𝑗 or not. Note that each entry of the matrix(𝑃𝑠𝑡)𝑖𝑗corresponds to the decision variable (𝑥𝑖𝑗) that was mentioned inSection 2.1:
𝑃𝑠𝑡= [[ [ 𝑃𝑡 𝑠(11) ⋅ ⋅ ⋅ 𝑃𝑠(1𝑚)𝑡 .. . d ... 𝑃𝑠(𝑛1)𝑡 ⋅ ⋅ ⋅ 𝑃𝑠(𝑛𝑚)𝑡 ] ] ] . (15)
Step 1. Compute the sum of the lower bound on the number of materials in language l (∑𝑟𝑙=1𝐿𝐿𝑙); the sum of the lower bound on the number of
materials in category k (∑𝑞𝑘=1𝐶𝐿𝑘). Step 2. If (∑𝑟𝑙=1𝐿𝐿𝑙)< (∑𝑞𝑘=1𝐶𝐿𝑘)
then randomly select a material i that is in language l,
randomly select a department j, and set(𝑃𝑠𝑡)𝑖𝑗= 1,
until all the lower bounds on the number of materials in all languages are reached. Step 3. If (∑𝑟𝑙=1𝐿𝐿𝑙)≥ (∑𝑞𝑘=1𝐶𝐿𝑘)
then randomly select a material i that belongs to category k,
randomly select a department j, and set(𝑃𝑠𝑡)𝑖𝑗= 1,
until all the lower bounds on the number of materials belong to all categories are reached. Algorithm 2: Initialization procedure of DPSO.
The initial population is generated by setting a void velocity and randomly generated entries of matrix𝑃𝑠𝑡for each particle𝑠. To find feasible solutions for the initial popula-tion, an initialization procedure is designed and depicted in Algorithm 2. To determine which constraint should be satisfied first, the sum of the lower bounds on the numbers of materials in all languages∑𝑟𝑙=1𝐿𝐿𝑙 and in all categories ∑𝑞𝑘=1𝐶𝐿𝑘 are computed. The one with less sum will be
satisfied first by randomly selecting the material that belongs to language𝑙 or category 𝑘.
4.2. Constraints Handling. In the literature, repair operators
and penalty functions are widely used approaches to handling constrained optimization problems. However, due to the computationally heavy load of repair operators, we focus on solely penalty functions. For each particle, the fitness value is evaluated by (16), where𝑂(𝑥𝑖𝑗) is the objective value of the studied problem given in (1), and𝐻(𝑥𝑖𝑗) is a penalty factor defined in (17). A feasible solution reflects its objective value as the fitness value, while an infeasible solution receives an objective value and a penalized value by (17). It can be seen from (17) that each term is associated with constrains (3), (6), (7), (8), and (9), as mentioned inSection 2.2. For instance, if a solution reports that the expense of any department 𝑗 exceeds the budget𝐵𝑗, addressed in constraints (3), then a positive penalty value can be subtracted from the fitness value to reflect the infeasibility. One has
𝐹 (𝑥𝑖𝑗) = 𝑂 (𝑥𝑖𝑗) − 𝐻 (𝑥𝑖𝑗) , (16) 𝐻 (𝑥𝑖𝑗) = ∑𝑚 𝑗=1 max{0,∑ 𝑛 𝑖=1𝑥𝑖𝑗𝑒𝑖𝑗− 𝐵𝑗 𝐵𝑗 } +∑𝑟 𝑙=1 max{0, ∑ 𝑛 𝑖=1𝑦𝑖𝑎𝑖𝑙− 𝐿𝑈𝑙 ∑𝑛 𝑖=1𝑦𝑖𝑎𝑖𝑙− 𝐿𝐿𝑙} +∑𝑟 𝑙=1 max{0, 𝐿𝐿𝑙− ∑ 𝑛 𝑖=1𝑦𝑖𝑎𝑖𝑙 𝐿𝑈𝑙− ∑𝑛𝑖=1𝑦𝑖𝑎𝑖𝑙} +∑𝑞 𝑘=1 max{0, ∑ 𝑛 𝑖=1𝑦𝑖𝑏𝑖𝑘− 𝑈𝐶𝑘 ∑𝑛 𝑖=1𝑦𝑖𝑏𝑖𝑘− 𝐶𝐿𝑘} +∑𝑞 𝑘=1 max{0, 𝐶𝐿𝑘− ∑ 𝑛 𝑖=1𝑦𝑖𝑏𝑖𝑘 𝐶𝑈𝑘− ∑𝑛𝑖=1𝑦𝑖𝑏𝑖𝑘}. (17)
4.3. Scout Particles. Premature convergence is a challenging
problem faced by PSO algorithms throughout the optimiza-tion process. To avoid premature convergence in the DPSO algorithm for the studied problem, this paper employs scout particles to enhance the exploration. The concept is to send out scout particles to explore the search space and collect more extensive information of optimal solutions for other particles. If a scout particle finds a solution that is quite different from the best solution and the expected fitness value is better, the scout particle will share the information with some particles by affecting their velocities.
The DPSO procedure with scout particles is depicted in Figure 1. Firstly, in order to generate a feasible swarm, the particles are generated by the initialization procedure as mentioned inSection 4.1. Secondly, when the swarm has not yet converged, the regular particle 𝑠 (𝑃𝑠𝑡) flies through the search space by the following steps: fitness evaluation, velocity calculation, and position updating. If the swarm converges, on the other hand, scout particles ̃𝑃𝑠𝑡 will be generated for exploration by randomly selecting a material to be acquired by all departments until the solution meets the lower bound and the upper bound on the number of languages and categories. In this paper, the convergence of DPSO is specified by the fitness variance.
The scout particles will share the information with the peer particles subject to a probability that depends on the velocity of each particle 𝑠. The larger velocity of particle 𝑠, the higher probability of the scout particle affecting the particle 𝑠 by (19), where the diversity coefficient (𝑐3) is a prespecified parameter and 𝑟3 is a random number drawn from the interval [0, 1]. Also, if the expected fitness value of the scout particle ̃𝑃𝑠𝑡 is greater than the fitness of the best solution bound by particle𝑃𝑡𝑠, the particles will share
Generate initial particles
Evaluate the fitness value (16)
Converged?
for each particle by (14)
for each particle by (13) Yes No Yes No Yes No Stopping criterion met? End Start
Calculate the expected fitness value by (18)
No
Share the information with particle s by
(19) Yes
Output the best particle (̂Pst)
(F(Pst)) for each particle by
Compute the velocity (Vst)
Update the position (Pst)
Generate scout particles (̃Pst)
u(0, Vmax) > |Vst|?
(F(̃Pst)) for the scout particle
F(̃Pt
s) > F(Pts)?
Figure 1: DPSO with scout particles.
information with other particles by (19). The expected fitness of the scout particle ̃𝑃𝑠𝑡 is calculated by (18), where𝜌 is a nonnegative weight and𝑝𝑖is the total preference of material 𝑖 cast by all departments, 𝑝𝑖= ∑𝑚𝑗=1𝑝𝑖𝑗. One has
𝐹(̃𝑃𝑠𝑡) = 𝜌 ×∑ 𝑛 𝑖=1(̃𝑃𝑠𝑡) 𝑝𝑖/ ∑𝑛𝑖=1(̃𝑃𝑠𝑡) 𝑚 + (1 − 𝜌) × ∑ 𝑛 𝑖=1(̃𝑃𝑠𝑡) 𝑐𝑖 ∑𝑚𝑗=1𝐵𝑗 , (18) 𝑉𝑠𝑡+1= 𝑤𝑉𝑠𝑡+ 𝑐3𝑟3(̃𝑃𝑠𝑡− 𝑃𝑠𝑡) . (19)
5. Computational Experiments
To manifest the effectiveness and efficiency of the proposed DPSO of materials acquisition, a series of computational experiments were designed and conducted. The experiment setting and test instances are described inSection 5.1and the computational results and analysis are given inSection 5.2.
5.1. Test Instances and Settings. Small-size test instances and
large-size test instances are exhibited in Tables 2 and 3, respectively. The number of materials 𝑛, the number of departments 𝑚, the budget limits 𝐵𝑗 of department 𝑗, the number of languages𝑟, the lower bound on the number of materials𝐿𝐿𝑙in language𝑙, the upper bound on the number of materials𝐿𝑈𝑙 in language𝑙, the number of categories 𝑞, the lower bound on the number of materials𝐶𝐿𝑘in category 𝑘, the upper bound on the number of materials 𝐶𝑈𝑘 in category𝑘 were tabulated. The small-size test instances (Case I), determined by the combinations of𝑛, 𝑚, 𝑟, and 𝑞, were composed of 60 (= 3 × 5 × 2 × 2) instances. The large-size test instances (Case II) were composed of 20 (= 5 × 2 × 2) instances, where𝑛 was 100,000.
The default values of the parameters in both DPSO and DPSO with scout particles algorithms were set as particle size𝑆 = 30, number of iterations 𝑡 = 500, inertia weight 𝑤 = 0.9, cognition learning rate 𝑐1 = 2.05, social learning rate𝑐2 = 2.05, and diversity coefficient 𝑐3= 0.5. The number of scout particles was set to one. All of the programs were implemented in C#.net and run on a PC with an Intel Core i5-2400 3.1 GHz CPU and 4 G RAM. The stopping criteria of all
Table 2: Small-size test instances, Case I. 𝑛 {𝑚, {𝐵𝑗}} {𝑟, {𝐿𝑈𝑙}, {𝐿𝐿𝑙}} {𝑞, {𝐶𝑈𝑘}, {𝐶𝐿𝑘}} 100 {1, {15000}}, {2, {6000, 9000}}, {3, {3000, 3000, 4000}}, {4, {3000, 3000, 4500, 4500}}, {5, {1500, 1500, 3000, 4500, 4500}}. {2, {10, 20}, {5, 12}}, {3, {5, 10, 15}, {3, 3, 3}}. {5, {3, 3, 6, 9, 9}, {3, 3, 3, 3, 3}}.{3, {6, 6, 12}, {3, 3, 6}}, 200 {1, {20000}}, {2, {8000, 12000}}, {3, {4000, 10000, 6000}}, {4, {3000, 3000, 3000, 4000, }}, {5, {2000, 2000, 2000, 8000, 4000, }}. {2, {15, 25}, {5, 10, }}, {3, {10, 15, 15}, {5, 5, 5}}. {5, {4, 4, 8, 12, 12}, {0, 0, 2, 3, 3}}.{3, {10, 10, 20}, {2, 4, 6}}, 300 {1, {30000}}, {2, {10000, 20000}}, {3, {6000, 6000, 18000, }}, {4, {6000, 6000, 9000, 9000}}, {5, {2000, 4000, 7000, 8000, 9000}}. {2, {25, 35}, {10, 20}}, {3, {15, 15, 30}, {10, 10, 15}}. {5, {10, 10, 10, 15, 15}, {5, 5, 5, 5, 5}}.{3, {10, 20, 30}, {5, 10, 10}},
Table 3: Large-size test instances, Case II. {𝑚, {𝐵𝑗}} (unit of𝐵𝑗: 10000) {r, {𝐿𝑈𝑙}, {𝐿𝐿𝑙}} {q, {𝐶𝑈𝑘}, {𝐶𝐿𝑘}} {5, {80, 80, 100, 120, 120}}, {10, {40, 40, 40, 50, 50, 50, 50, 60, 60, 60}}, {15, {30, 30, 30, 30, 30, 33, 33, 33, 33, 33, 36, 36, 36, 36, 36}}, {20, {20, 20, 20, 20, 20, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25, 30, 30, 30, 30}}, {25, {16, 16, 16, 16, 16, 18, 18, 18, 18, 18, 20, 20, 20, 20, 20, 22, 22, 22, 22, 22, 24, 24, 24, 24, 24}}. {2, {4000, 6000}, {1000, 2000}}, {3, {3000, 3000, 4000}, {500, 500, 1000}}. {5, {1000, 1000, 2000, 3000, 3000}, {200, 400, 800, 1000, 1200}}, {10, {600, 600, 800, 1000, 1000, 1000, 1200, 1400, 1400}, {100, 200, 300, 500, 500, 600, 700, 700, 800, 1000}}.
test cases were defined as no improvement on the incumbent solution can be achieved within 50 consecutive iterations.
5.2. Results and Analysis. To understand the effectiveness and
efficiency of the proposed DPSO, we examine the four key features, including initialization, swarm topology, constraints handling, and scout particles. The following subsections detail the results and analysis (Tables4–7). The rows labeled “Average” and “Stdev” in each table list the average and standard deviations of improvement and execution time for several observations. The next three rows in each table report the number of observations on the results of different DPSO algorithms for the test instances, the 𝑧-score of statistical test where the null hypothesis is that the different features of DPSO algorithm have the same improvement (or execution time), and the𝑃 value which is translated from 𝑧-score. Note that the number of observations for case I (resp., II) is set as 480 (resp., 160), the combinations 8 (= 2 × 2 × 2) of features for 60 (resp., 20), for the purpose of evading the influence of other features. The significance level𝛼 is set at 0.05. Also, to facilitate a comparison of the effectiveness of the proposed DPSO algorithm across different test instances, the improvement in percentage over Algorithm Greedy, calculated as in (20), is employed instead of an absolute difference in objective value:
improvement= (DPSO− greedy
greedy ) %. (20)
Table 4: Results of different initialization strategies on two test cases.
Case Measure Improvement Execution time
Random Greedy Random Greedy
I Average 52.46% 52.11% 1.6455 1.5956 Stdev 0.2805 0.2795 1.5258 1.3455 Observations 480 480 480 480 𝑧-score 0.1942 0.5362 𝑃 value 0.8460 0.5918 II Average 71.32% 73.01% 779.9824 800.9922 Stdev 0.3675 0.3722 318.31 324.77 Observations 160 160 160 160 𝑧-score −0.4090 −0.5843 𝑃 value 0.6825 0.5590
5.2.1. Initialization. Results of different initialization
strate-gies on the 60 small-size test instances (Case I) and 20 large-size test instances (Case II) are summarized inTable 4. The column labeled “Random” reports the results of DPSO algorithm that generates the initial swarms by the proposed initialization procedure in Section 4.1; the column labeled “Greedy” reports the results of DPSO algorithm that generates the initial swarms by both the abovementioned initialization procedure and the Algorithm Greedy inSection 2.3.
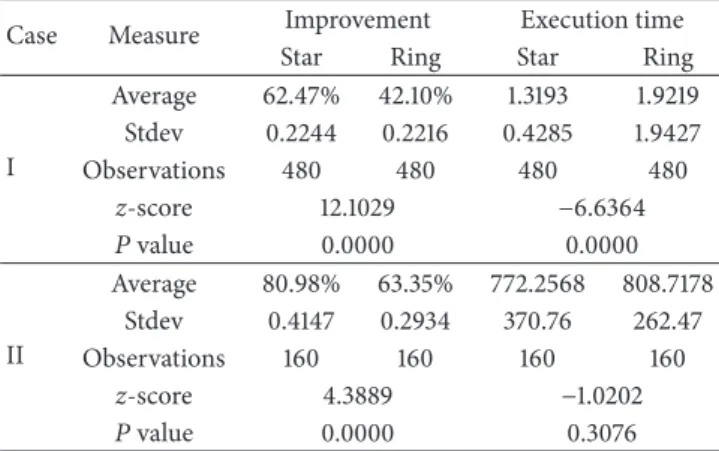
Table 5: Results of different swarm topologies on two test cases.
Case Measure Improvement Execution time
Star Ring Star Ring
I Average 62.47% 42.10% 1.3193 1.9219 Stdev 0.2244 0.2216 0.4285 1.9427 Observations 480 480 480 480 z-score 12.1029 −6.6364 𝑃 value 0.0000 0.0000 II Average 80.98% 63.35% 772.2568 808.7178 Stdev 0.4147 0.2934 370.76 262.47 Observations 160 160 160 160 z-score 4.3889 −1.0202 𝑃 value 0.0000 0.3076
Table 6: Results of different constraints handlings on two test cases.
Case Measure Improvement Execution time
Accept Reject Accept Reject
I Average 52.81% 51.76% 1.6610 1.5802 Stdev 0.2826 0.2773 1.4622 1.4135 Observations 480 480 480 480 z-score 0.5825 0.8703 P value 0.5603 0.3841 II Average 72.85% 71.48% 803.15 777.82 Stdev 0.3693 0.3705 310.83 331.79 Observations 160 160 160 160 z-score 0.3304 0.7047 P value 0.7410 0.4810
Table 7: Results of DPSO with and without scout particles on two test cases.
Case Measure Improvement Execution time
Standard Scout Standard Scout
I Average 47.36% 57.21% 2.0065 1.2346 Stdev 0.2443 0.3037 1.8070 0.7588 Observations 480 480 480 480 z-score −5.5393 8.6285 P value 0.0000 0.0000 II Average 62.99% 81.34% 839.9745 741.0001 Stdev 0.3015 0.4073 295.65 338.65 Observations 160 160 160 160 z-score −4.5795 2.7849 P value 0.0000 0.0054
It can be seen from Table 4 that the improvements achieved by two different initialization strategies are appeal-ing. For case I, the improvement on the random strategy is slightly better than that on the greedy strategy (52.46% versus 52.11%); for case II, the greedy strategy performs slightly better (73.01% versus 71.32%). However, the difference in improvement between the “Random” and “Greedy” initial-izations for case I and case II yielded𝑃 values of 0.8460 and 0.6825 using𝑧-test at 𝛼 of 0.05. Therefore, the difference in
improvement of two initialization strategies is not statistically significant. We could thus reason that the DPSO equipped with these different initialization strategies will lead to the same significant improvement rate.
Regarding the execution time, both initialization strate-gies can produce solution for small test instances (Case I) in a very short time. The difference in execution time between the “Random” and “Greedy” initialization on case I and II yielded a𝑃 value of 0.5918 and 0.5590 by 𝑧-test at 𝛼 = 0.05. It reveals that the difference is not statistically significant on both cases. This phenomenon is reasonable because both of the initialization strategies enable the diversity of initial swarms before they satisfy the stopping criterion. These results suggest that DPSO can obtain good solutions with these initialization strategies.
5.2.2. Swarm Topology. Results of different swarm topologies
on the 60 small-size test instances (Case I) and 20 large-size test instances (Case II) are summarized inTable 5. The columns labeled “Star” and “Ring” list the results of DPSO algorithm with star topology and ring topology.
From Table 5, the improvements of both star and ring topologies on two test cases reached a high percentage (on average 62.25%), being quite attractive. For cases I and II, the difference in execution time yielded a𝑃 value less than 0.05 (𝑃 value = 0.0000), indicating that a statistically significant difference in improvement existed. Accordingly, we would suggest that star topology (gbest) is an effective swarm topology to deliver solutions with satisfactory qualities.
In Table 5, the results of execution time needed by different topologies reaffirm the fact that star topology (gbest) seem to have a faster convergence rate than the ring topology (lbest). For small-size test instances (Case I), the𝑧-test of the difference in execution time between star topology (1.31 sec-onds) and ring topology (1.92 secsec-onds) yielded a𝑃 value less than 0.05, indicating that a statistically significant difference in execution time exists; for large-size test instances (Case II), even though the star topology spent less computation time, the difference in execution time between the star topology (772.26 seconds) and ring topology (808.72 seconds) yielded a 𝑃 value of 0.3076 by 𝑧-test at 𝛼 = 0.05, specifying that no statistically significant difference in execution time was found. This is reasonable because of the large standard deviation in the results of case II. The result suggests that the star topology spent less computational time to obtain attractive solutions to the studied problem.
5.2.3. Constraints Handling. Results of different constraints
handling mechanisms on Cases I and II are shown inTable 6. The column labeled “Accept” reveals the results of DPSO algorithm that accept infeasible solutions as the best solution found by particle 𝑠 at iteration 𝑡 (𝑃𝑡𝑠); on the other hand, the column labeled “Reject” reveals those reject infeasible solutions.
As can be seen from Table 6, the improvements of two different constraint handling approaches do produce good solutions. For the small-size test instances (Case I), the average improvements of the “Accept” mechanism and the
“Reject” mechanism are 52.81% and 51.76%; for the large-size test instances (Case II), the average improvements are 72.85% and 71.48%. The results show that the “Accept” mechanism reaches slightly higher improvement than the “Reject” mechanism in both cases within a longer execution time. This is reasonable because the “Accept” mechanism has more chance to explore the infeasible solution space and takes more iteration to converge. However, to have a concise comparison of “Reject” mechanism and the “Accept” mechanism, the𝑧-test yields 𝑃 values of 0.5603 and 0.7410, which indicate that there is no statistical difference. The computational results and analysis shown inTable 6suggest that DPSO with both constraints handling mechanisms can produce quality solutions.
5.2.4. Scout Particles. Results of DPSO and DPSO with scout
particles on two test instances (small size and large size) are exhibited in Table 7. The column labeled “Scout” displays the results of DPSO algorithm with scout particles, while the column labeled “Standard” displays the results of DPSO algorithm without scouts.
For the improvement, the DPSO with scouts does pro-duce better solutions than the standard DPSO on all test instances. It can be seen fromTable 7 that the DPSO with scout particles reported 57.21% improvement rate on small-size test instances and 81.34% improvement rate on large-size test instances, while the standard DPSO showed 47.36% and 62.99%. The 𝑧-test of the difference in improvement yielded a 𝑃 value less than 0.05 which indicates that a statistically significant difference in execution time existed. The effectiveness of the proposed DPSO can be attributed to the scout particles that decrease the chance to be trapped in local optimal by exploring the search space. This reveals that the proposed DPSO is an effective approach to the problem.
As for the execution time, the DPSO with scouts took less computation time than the standard DPSO on all test instances as well. InTable 7, the DPSO with scout particles took 1.23 seconds for solving the small-size test instances and 741 seconds 741 for large-size test instances. On the other hand, the elapsed times of the standard DPSO are 2.01 seconds and 839.97 seconds. For each case, the𝑧-test yields a 𝑃 value below 0.05, indicating that the difference in execution times is significant. This result evinces the efficiency of the DPSO with scouts by showing that the time elapsed is smaller than the standard DPSO. This phenomenon may be due to the fact that scout particles were evaluated by the expected fitness instead of the objective function.
6. Conclusions
In this paper, we have proposed an integer programming model for the materials acquisition problem, which is to max-imize both the average preference and the budget execution rate being subject to some constraints of the budget, the required number of materials in each category and language. To solve the constrained problem, we have developed a DPSO algorithm and designed an initialization strategy to generate feasible particles. We have also conducted computational
experiments of two sets test instances to demonstrate the effectiveness and efficiency of the proposed DPSO algorithm. To better solve the studied problem, four different features of the proposed DPSO, including initialization strategies, swarm topology, constraints handling mechanism, and scout particles, are discussed. Firstly, we compare the results of employing the proposed initialization procedure, and the results of employing both the proposed Algorithm Greedy and initialization procedure. The computational results show that DPSO algorithm can obtain quality solutions with both the initialization strategies in a reasonable time. Secondly, we compare the results of performing star topology and ring topology. The results evince that star topology significantly outperforms ring topology in all test instances. Next, we compare the performances resulted from different constraint handling mechanisms. One mechanism is to accept the infeasible solutions as the best solution found by each particle, while the other is to reject the infeasible solutions as the best solution found by each particle. The computational results demonstrate that these two mechanisms reach the same performance. Lastly, we compare the results of standard DPSO and DPSO with the proposed scout particles. The results reveal that DPSO with scouts reaches higher improve-ment rates and takes shorter execution time. Accordingly, we would suggest that DPSO with the proposed initialization procedure, star topology, and scout particles is an effective approach to delivering attractive solutions in a reasonable time.
References
[1] J. Harrell, “Literature of acquisitions in review, 2008–9,” Library Resources and Technical Services, vol. 56, no. 1, pp. 4–13, 2012. [2] W. H. Walters, “Journal prices, book acquisitions, and
sustain-able college library collections,” College and Research Libraries, vol. 69, no. 6, pp. 576–586, 2008.
[3] L. S. Connaway, K. Downing, Y. Du et al., “2010 top ten trends in academic libraries,” College and Research Libraries News, vol. 71, no. 6, pp. 286–292, 2010.
[4] M. H. Beilby and T. H. Mott Jr., “Academic library acquisitions allocation based on multiple collection development goals,” Computers and Operations Research, vol. 10, no. 4, pp. 335–343, 1983.
[5] K. Wise and D. E. Perushek, “Linear goal programming for academic library acquisitions allocations,” Library Acquisitions: Practice and Theory, vol. 20, no. 3, pp. 311–327, 1996.
[6] K. Wise and D. E. Perushek, “Goal programming as a solution technique for the acquisitions allocation problem,” Library and Information Science Research, vol. 22, no. 2, pp. 165–183, 2000. [7] T.-F. Ho, S. J. Shyu, B. M. T. Lin, and Y.-L. Wu, “An evolutionary
approach to library materials acquisition problems,” in Proceed-ings of the IEEE International Conference on Intelligent Systems (IS ’10), pp. 450–455, London, UK, July 2010.
[8] S. K. Goyal, “Allocation of library funds to different departments of a university—an operational research approach,” College and Research Libraries, vol. 34, pp. 219–222, 1973.
[9] A. Arora and D. Klabjan, “A model for budget allocation in multi-unit libraries,” Library Collections, Acquisition and Technical Services, vol. 26, no. 4, pp. 423–438, 2002.
[10] T. Niyonsenga and B. Bizimana, “Measures of library use and user satisfaction with academic library services,” Library and Information Science Research, vol. 18, no. 3, pp. 225–240, 1996. [11] M. R. Garey and D. S. Johnson, Computers and Intractability:
A Guide to the Theory of NP-Completeness, W.H. Freemaan and Company, New York, NY, USA, 1979.
[12] C.-J. Liao, C.-T. Tseng, and P. Luarn, “A discrete version of par-ticle swarm optimization for flowshop scheduling problems,” Computers and Operations Research, vol. 34, no. 10, pp. 3099– 3111, 2007.
[13] T. J. Ai and V. Kachitvichyanukul, “A particle swarm optimiza-tion for the vehicle routing problem with simultaneous pickup and delivery,” Computers and Operations Research, vol. 36, no. 5, pp. 1693–1702, 2009.
[14] J. Kennedy and R. Eberhart, “Particle swarm optimization,” in Proceedings of the IEEE International Conference on Neural Networks, pp. 1942–1948, Perth, Australia, December 1995. [15] R. Poli, “Analysis of the publications on the applications of
particle swarm optimisation,” Journal of Artificial Evolution and Applications, vol. 2008, Article ID 685175, 10 pages, 2008. [16] A. Silva, A. Neves, and T. Goncalves, “An heterogeneous
particle swarm optimizer with predator and scout particles,” in Autonomous and Intelligent Systems, Lecture Notes in Computer Science, pp. 200–208, 2012.
[17] A. Hatamlou, “Black hole: a new heuristic optimization approach for data clustering,” Information Science, vol. 222, pp. 175–184, 2013.
[18] C.-C. Chiu, M.-H. Ho, and S.-H. Liao, “PSO and APSO for optimizing coverage in indoor UWB communication system,” International Journal of RF and Microwave Computer-Aided Engineering, vol. 23, no. 3, pp. 300–308, 2013.
[19] Y. Tian, D. Liu, D. Yuan, and K. Wang, “A discrete PSO for two-stage assembly scheduling problem,” International Journal of Advanced Manufacturing Technology, vol. 66, no. 1-4, pp. 481– 499, 2013.
[20] J. Kennedy and R. C. Eberhart, “Discrete binary version of the particle swarm algorithm,” in Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, pp. 4104–4108, Piscataway, NJ, USA, October 1997.
[21] R. C. Eberhart and Y. Shi, “Comparing inertia weights and con-striction factors in particle swarm optimization,” in Proceedings of the Congress on Evolutionary Computation (CEC ’00), pp. 84– 88, La Jolla, Calif, USA, July 2000.
[22] R. Poli, J. Kennedy, and T. Blackwell, “Particle swarm optimiza-tion: an overview,” Swarm Intelligence, vol. 1, pp. 33–57, 2007. [23] D. Bratton and J. Kennedy, “Defining a standard for particle
swarm optimization,” in Proceedings of the IEEE Swarm Intelli-gence Symposium (SIS ’07), pp. 120–127, Honolulu, Hawaii, USA, April 2007.
[24] G. Coath and S. K. Halgamuge, “A comparison of constraint-handling methods for the application of particle swarm opti-mization to constrained nonlinear optiopti-mization problems,” in Proceedings of the Congress on Evolutionary Computation, pp. 2419–2425, Canberra, Australia, December 2003.
[25] K. E. Parsopoulos and M. N. Vrahatis, “Particle swarm opti-mization method for constrained optiopti-mization problems,” in Intelligent Technologies—Theory and Applications: New Trends in Intelligent Technologies, vol. 76, pp. 214–220, 2002.
[26] G. T. Pulido and C. A. Coello Coello, “A constraint-handling mechanism for particle swarm optimization,” in Proceedings of the Congress on Evolutionary Computation (CEC ’04), pp. 1396– 1403, Portland, Ore, USA, June 2004.
[27] A. Garc´ıa-Villoria and R. Pastor, “Introducing dynamic diversity into a discrete particle swarm optimization,” Computers and Operations Research, vol. 36, no. 3, pp. 951–966, 2009.
[28] T. M. Blackwell and P. Bentley, “Don’t push me! Collision-avoiding swarms,” in Proceedings of the Congress on Evolutionary Computation, pp. 1691–1696, Honolulu, Hawaii, USA, May 2002. [29] Y.-L. Wu, T.-F. Ho, S. J. Shyu, and B. M. T. Lin, “Discrete particle swarm optimization for materials acquisition in multi-unit libraries,” in Proceedings of the Congress on Evolutionary Computation, pp. 1–7, Brisbane, Australia, June 2012.
Submit your manuscripts at
http://www.hindawi.com
Computer Games Technology International Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Distributed Sensor Networks International Journal of Advances in
Fuzzy
Systems
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
International Journal of Reconfigurable Computing
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Applied
Computational
Intelligence and Soft
Computing
Advances inArtificial
Intelligence
Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Advances in Software EngineeringHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of Journal of
Computer Networks and Communications
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Multimedia
International Journal of
Biomedical Imaging
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Artificial
Neural Systems
Advances inHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Robotics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Computational Intelligence & Neuroscience
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Modelling & Simulation in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Human-Computer Interaction
Advances in
Computer EngineeringAdvances in Hindawi Publishing Corporation