On a General Optimal Algorithm
forMultirate
Output Feedback Controllers
of Linear Stochastic
Periodic Systems
Nie-Zen Yen and Yung-Chun WuAbstmct-A modified optimal algorithm for multirate output feedback controllers of linear stochastic periodic systems is developed. By combin- ing the discrete-time linear quadratic regulation (LQR) control problem and the discrete-time stochastic linear quadratic regulation (SLQR) control problem as the extended h e a r quadratic regulation (ELQR) control problem, one derives a general optimal algorithm to balance the advantages between the optimal transient response of LQR control problem and the optimal steady-state noise regulation of SLQR control problem. In general, the solution of this algorithm is solved from a set of coupled matrix equations. Special cases for which the coupled matrix equations can be reduced to a discrete-time algebraic Riccati equation are also discussed. A reducible case is the well-known optimal algorithm derived by AGRahmani and Franklin 111, where the system has com- plete state information, and the discrete-time quadratic performance index is transformed from a continuous-time quadratic performance index.
I. INTRODUC~ON
In a recent paper [l], AL-Rahmani and Franklin presented an optimal multirate state feedback control scheme for linear peri- odic systems based on the linear quadratic regulation (LQR) control problem. They show that the continuous-time LQR control problem subject to the multirate structure can be trans- formed into a discrete-time LQR control problem, and the solution can simply be solved from a discrete-time algebraic Riccati equation. As a matter of fact, the use of multirate sampling not only makes it easy to solve the LQR control problem, but also produces better response characteristics and less LQR cost than that of single rate sampling (if the state is sampled at the same rate). Colaneri and De Nicolao [8] have presented an optimal filter-based multirate control scheme for linear stochastic systems with incomplete state measurements based on the linear quadratic and Guassian (LQG) control problem. Due to the possibility of more freedom in sampling period selection, it is easy to implement a multirate control scheme by digital computers.
In this note, a modified multirate control scheme for linear stochastic periodic systems is developed. Such a control scheme is constructed by using instantaneous output feedback (i.e., a zero-order controller). A fact to be noted is that in the optimal periodic control theory using the classical separation principle (e.g., Bittanti et al. [6] and Colaneri and De Nicolao [8]), the LQG control problem can be considered as a direct extension of the LQR control problem. However, this fact is not true in our approach unless the system has complete state information. To overcome this difficulty, one combines the discrete-time linear quadratic regulation (LQR) control problem and the discrete- time stochastic linear quadratic regulation (SLQR) control prob- lem as the extended linear quadratic regulation (ELQR) control problem, then by solving this problem, one derives a general Manuscript received April 12, 1991; revised December 6, 1991 and May 18, 1992. This research was supported by the National Science Council of ROC under Grant CS81-0210-D009-503.
N.-Z. Yen is with the Institue of Electronics, National Chiao Tung University, Hsinchu, Taiwan, 30050, Republic of China.
Y.-C. Wu is with the Department of Control Engineering, National Chiao Tung University, Hsinchu, Taiwan, 30050, Republic of China.
IEEE Log Number 9205250.
algorithm to extend the LQR and the SLQR algorithms simulta- neously. This algorithm allows one to choose ratios on the LQR and the SLQR control problems, so that the presented multirate output feedback controller can balance the advantages between the optimal transient response of LQR control problem and the optimal steady-state noise regulation of SLQR control problem.
11. PRELIMINARY A. Periodic System
Consider a multivariable linear sotchastic periodic system i ( t ) = A ( t ) x ( t )
+
B ( t ) u ( t )+ ( ( t )
Y ( k T )
= Y A W
+ 4 k T )(1.a) YS(t> = C ( t ) x ( t ) (1 .b)
(1 -c> where x ( t ) E R " is the state, u ( t ) E R"' is the input, y s ( t ) E R' is the output, y ( k T ) ( T is a positive real, and k = 0,1,2,
...
is the practical output measurement, & ( t ) E R" and u ( k T ) E R'are independent white noise with zero means and correlations described by
E( t ( t ) t ' ( t o ) ) = G ( t ) S ( t - t o ) (2.a)
E(u(kT)u'(k0T)) = R q ( k
- k o ) (2.b) where 7 denotes the transpose operation of a matrix, G ( t ) E R n X " and R E R r X r are positive semidefinite matrices, 6(*) denotes the continuous-time delta function, q ( . ) denotes the discrete-time pulse function, ( ( t ) and u ( k T ) are independent ofx(O), and the parameters A(t), E(?), C ( t ) , and G ( t ) are piece- wise continuous and satisfy the periodical property that A ( t ) = A(t - T ) , B ( t ) = B(t - T ) , C ( t ) = C ( t - T ) , and G ( t ) = G(t
- T ) .
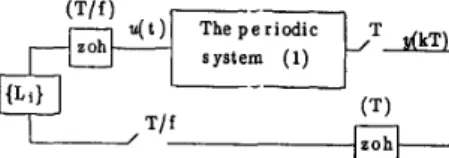
B. Multirate Output Feedback Controller periodic system (1) (see Fig. 1) is given by
A multirate output feedback controller of the linear stochastic
u ( k T
+
iT/f+
0 ) = L , y ( k T ) (3)where f is a selected positive integer, 0 E [0 T / f ) , and L j E Rmxr for i = 0, 1,2;.-, f - 1 are the controller gains. By substi-
tuting the multirate control (3) into the system (11, one can obtain the following closed-loop sampled-data system:
x ( ( k
+
1)T) =( x +
n L C ) x ( k T )+
a ( k T )in which
x =
+(T,O), C = C(O), andR =
[no n,
.*.n f - , ]
E R n x m f ,v ( k T ) = L T + ( T , s ) t ( k T + s ) d r
+
R L u ( k T ) where +(t, s) denotes the state transition matrix, and940 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 6, J U N E 1993
system
-2
( 1 )Fig. 1. A multirate output feedback controller of linear periodic systems.
Notice that q ( k T ) is also a white noise with zero mean and correlation described by
E ( q ( k T ) q ' ( k , T ) ) = ( S + RLRL'R')q(k
-
k , ) (8)where
S =
kT4(T,
s ) G ( s ) + ( T , s)' h. (9)Remark I : In the presented approach, the output is sampled at the rate 1/T (if necessary, the initial time t = 0 can be moved). A caution to such sampling is that the detectability may be lost (that is, CO),&)) is detectable but ( C , A ) is not detectable, see [2], [lo]). If this condition occurs, one needs to sample the output faster than 1/T. In general, a faster output sampling would result in a more complicate (e.g., time varying or higher order) closed-loop sampled-data system which is beyond the scope of this note.
C. The ELQR Control Problem
on ~ ( 0 ) . By the stochastic closed-loop system (4), one has Let x,(t> = E[x(t)lx(Oll denote the conditional mean of x ( t )
x , ( ( k
+
1)T) =( X +
R L C ) x , ( k T ) . (10) Thus, from the viewpoint of the conditional mean, the transient response due to x(0) can be considered as a deterministic regulation problem. One can define the following two perfor- mance indexesJd = E [ x ; ( k T ) ( Q ,
+ C'L'Q;
m~ r = n
stable, and the index J = YdJd
+ y,J, (yd and
7, are nonnega- tive real numbers) subject to the deterministic closed-loop sys- tem (10) and the stochastic closed-loop system (4) is minimized. Remark 2: It can be shown (see [l]) that a continuous-time quadratic performance index subject to the multirate structure can be transformed to an equivalent discrete-time quadratic performance index, so that it does not lose the generality to select discrete-time quadratic performance indices for multirate controller designs of a linear continuous-time periodic system.111. SOLVING THE ELQR CONTROL
PROBLEM
By the deterministic closed-loop system (10) and the stochas- tic closed-loop system (4), the general index J = ydJd+ y,J,
equals to (see 1121, [141, 1111)J = yd Tr VdE[ X ( O ) x ' ( o ) ]
+
ys Tr As( Q ,+
C'L'QZ+
Q2 LC+
C'L'Q,LC) (12) where v d and A, are positive semidefinite matrices solved fromthe following Lyapunov equations, respectively,
( b +
RLC)A,(X+ R L C ) ' - A,+
(S+
RHLL'R') = 0.(13.b) Now, let Ad E R"'" be a positive semidecnite matrix solved from the following Lyapunov equation (if A
+
RLC is stable, such a solution must exist):( X +
R L C ) A d ( x + R L C ) ' - A,+
E[x(O)x'(O)] = 0. (14) By (14) and (13.a), one can obtainTr VdE[X(o)X'(o)]
= Tr Ad(Q,
+ C'L'Q;
+ Q2LC
+ C'L'Q3LC). (15)
._ -Thus, by defining A = ydAd
+ y,A,, the index (12) can be rear-
J = Tr A(Ql
+ C'L'Q;
+
Q2LC+ C'L'Q3LC).
(16)+ezLc
+ C'L'Q3LC)xdkT)I (ll.a)ranged by
J, = k-. LimE[x'(kT)(Q, m
+
CTLTQ;+Q,LC
+ CTLTQ3LC)x(kT)] (1l.b)
where Q , ER"'", Q2 E Rnxmf, Q3 E R m f X m f , and Q , and Q3 are positive semidefinite. Notice that Jd serves as a measure of the transient response due to x(O), and J, serves as a measure of the steady-state noise regulation. Corresponding to the indexes, the following two control problems can be considered.+
R LC is stable (i.e., all eigenvalues lie inside the unit complex circle), and the index Jd subject to the deterministic closed-loop system (10)is minimized.
SLQR control problem: Find a gain L , such that
2
+
R LC is stable, and the index J, subject to the stochastic closed-loop system (4) is minimized.In general, the LQR and the SLQR control problems cannot LQR control problem: Find a gain L , such that
On the other hand, by combining (13.b) and (14), one can obtain
(A+
RLC)A(X+ RLC)'- A+ ydE[x(O)x'(O)]
+
y,(S+
RLRL'R') = 0. (17)Main Theorem: A necessary condition for L to solve the ELQR control problem is that L satisfies the following coupled matrix equations:
( X +
R L C ) ' V ( X + RLC)-
V+(e,
+ C'L'Q;
+
Q2LC+
CTLTQ3LC) = 0 (18.a)have the same solution unless the system has complete state information (as will be clear later). To balance the advantages of LQR and SLQR control problems, an extended control problem can be introduced as follows.
ELQR controlproblem: Find a gain L, such that
x +
RLC isR ' V ( x + RLC)AC'
+ y,R'VRLR
+(Q;ACT
+ Q3LCAC')
= 0 (18.c)where V E R"'" and A E R"'" are positive semidefinite matri- ces.
Proof To minimize the index (16) subject to (17), one can give an augmented cost function as follows (see [7]):
J, = Tr
A(
Q ,+
C'L'Q;+
Q2 LC+
C'L'Q, L C )+
Tr V{(x+ R L C ) A ( X + RLC)'-
A+ydE[x(O)x'(0)]
+
y,(S+
RLRL'R')} (19) where the multiplierV
E Rnx" is positive semidefinite. By tak- ing dl,/dA = 0 and dlc/dV = 0, one obtains (18.a) and (18.b), respectively. Also, by taking dlc/dL = 0, one obtains (18.c).0
Now,
let ydE[x(O)x'(O)l+
y,S be positive definite, the follow- ing two corollaries are easily obtained from main theorem.C o r o l l q 1: If rank[C] = n, R = 0, Q3 is positive definite,
and (Q,, A, 0) is stabilizable and detectable, then there exists a unique solution of the ELQR control problem. Moreover, the unique solution is given by
L = -(R'VR
+ Q 3 ) - ' ( R ' V x + Q;)C-'
(20.a)where V is a positive semidefinite matrix solved from the follow-
ing discrete-time algebraic Riccati equation:
Z V X -
V +
Q , -(RTVx+
QZ)'(WVR+
e,)-'
Hence, the theorem is proved..(R'VJ+ Q ; ) = 0. (20.b)
Proof Since rank[AC'] = n and R = 0, (18.c) can be re- duced to
R'V(x+ R L C )
+
Q; + Q,LC = 0 (21) which leads to (20.a). By substituting (20.a) into (18.a), one obtains (20.b). Thus, the necessity of (20) is proved. Besides, by (18.a) and (18.b), one has J = Tr A(Q, + C'L'Q;+
Q2LC + C'L'Q,LC) = Tr V('(ydE[x(O)x'(O)]+
yJ). It is known (see [91, [15]) that the algebraic Riccati equation (20) exists a unique stable minimal solution. Hence, the corollary is proved. 0Corollary 2: If rank [ R ] = n , rank [ C] = r, Q , is positive def- inite, Q2 = 0, Q3 = 0, and ( C ,
x)
is detectable, then the ELQRcontrol problem can be solved by
L = - R ~ ~ A C ~ ( C A C ~
+
?,R)-' (22.a) where Rt E R m f x n is a matrix to satisfy R a t = I,, andA
is a positive definite matrix solved from the following discrete-time algebraic Riccati equation:XALT
- A+
ydE[x(O)x'(O)] + 'y,S-xAC'(CAC'+
y , R ) - ' C A z = 0. (22.b)hf
Since rank[R'V] = n , Q2 = 0 and Q3 = 0, (18.c) can be reduced to(x+
RLC)AC'+ y,RLR
= 0 (23) which leads to (22.a). By substituting (22.a) into (18.b), one obtains (22.b). Hence, the necessity of (22) is proved. On the other hand, the algebraic Riccati equation (22) exists a stable minimal solution. Hence, the corollary is proved.IV. SOLVING THE LQR AND SLQR PROBLEMS A. LQR Control Problem
ing result.
Let y, = 1 and y, = 0, the main theorem leads to the follow-
Corollary 3: A necessary condition for L to solve the LQR control problem is that L satisfies the following coupled matrix equations:
( X +
RZLc)'v,(x+ R L C )-
V,+
( Q ,+ C'L'QZ
+
Q2 LC+
C'L'Q, L C ) = 0 (24.a)(A+
R L C ) A , ( ~ + RLC)'-
A,+
E [ ~ ( O ) Y ( O ) ] =o
(24.b)n'v,(X+
RLC)h,C'+ Q;AdC'+
Q3LCAdC' = 0 (24.c)where Vd E R" and
A,
E R""
are positive semidefinite ma- trices.Let E[x(O)x'(O)] be positive definite, corollaries 1 and 2 lead to the following results.
Cor&lary 4: If rank[C] = n , Q, is positive definite, and ( Q , , A , R ) is stabilizable and detectable, then there exists a unique solution of LQR control problem. Moreover, the unique solution is given by
L = -(n'Vdn
+
Q 3 ) - ' ( n T V d x + Q ; ) c - ' (25.a) where V, is a positive semidefinite matrix solved from thefollowing discrete-time algebraic Riccati equation:
Z V d X -
V,
+
Q , - ( n ' V d x + QZ)'(n'Vdn-(R'V,x+ QZ) = 0. (25.b) Corollary 5: If rank [ RI = n , rank [ C] = r, Q , is positive def- inite, Q , = 0, Q3 = 0, and ( C ,
x)
is detectable, then the LQR control problem can be solved byL =
-R~~A,c~(cA,c~)-~
(26.a) whereat
E R m f x n is a matrix to satisfyant
= I,, and Ad is a positive definite matrix solved from the following discrete-time algebraic Riccati equation:xA,z
- Ad+
E[X(O)X'(O)] - xA,C'(Ch,C')-lChdA = 0.(26.b) B. SLQR Control Problem
Let y, = 0 and 7, = 1, the main theorem leads to the follow- ing result.
Corollary 6: A necessary condition for L to solve the SLQR control problem is that L satisfies the following coupled matrix equations:
(x+
R L C ) A , ( ~ + RLC)' - A,+
(s
+
R L R L ~ R ~ ) =o
(27.a)(x+
R L C ) ' V , ( X + R L C ) -V ,
+
( Q ,+
C'L'Q; +Q,LC+ C'L'Q,LC)
= 0 (27.b) R'V,(x+ RLC)A,C'+ R'V,RLR+
Q;A,C'+
Q3LCA,C' = 0 ( 2 7 . ~ ) whereV ,
E R n x n andA,
E R n x " are positive semidefinite ma- trices.Let S be positive definite, corollaries 1 and 2 lead to the following results.
Corollay 7: If rank[C] = n, R = 0, Q3 is positive definite, and (Q,, A , R) is stabilizable and detectable, then there exists a unique solution of SLQR control problem. Moreover, the unique
942 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 6, JUNE 1993
solution is given by
L =
-(R'V,n
+
Q3)-'(RTV,K+ Q;)C-' (28.a) whereV ,
is a positive semidefinite matrix solved from the following discrete-time algebraic Riccati equation:xV,Z-
V ,
+ Q,
-
(WV,x+
Q;)'(R'V,R+
QJ'*(n'KX+
Qz) = 0. (28.b) Corollary 8: If rank [ RI =n,
rank [ C ] = r, Q, is positive def- inite, Q, = 0, Q3 = 0, and ( C ,4
is detectable, then the SLQR control problem can be solved byL =
-~~+XA,C(CA,C~
+
R I - ' (29.a)where Rt E R m f X n is a matrix to satisfy Ofit = I,, and A, is a positive definite matrix solved from the following discrete-time algebraic Riccati equation:
X A , ~
-
A,+
s
-~ A , c ~ ( c A , c ~
+
R)-'cA,A'
= 0. (29.b)Remark 3: Although it is necessary that all the solutions of LQR, SLQR, and ELQR control problems be solved from a set of coupled matrix equations, however, an admissible solution may not exist even if the set N =
{ L I Z +
RLC is stable} is not empty. To guarantee the ELQR algorithm to be solvable, a simple way is by assuming Q,, Q3, and y,E[x(O)x(OYI -1- 7,s to be positive definite. Notice that by (16) and (17), the index J can be expressed by J = Tr A(Ql+
CTLTQz+ Q,LC
+
CTL"Q3LC) (30) where m A(x+
nLC)k{'ydE[x(o)x(o)']+
7,(s
+
RLm'R')) k = O*(A'
+ C'L'RT)k
(31)so that by assumption, a gain L with finite index must be bounded and contained in N. Since for every compact subset # of U, J is continuous and bounded in L over # (a proof can be found in [14]), so that by Weierstrass theorem, # contains a minimal point. Hence, it is clear that if and only if N is not empty, the ELQR control problem is solvable (the LQR and SLQR control problems are two special cases).
Remark 4: By main theorem and corollaries 3 and 6, it is clear that in general, the LQR, SLQR, and ELQR algorithms have distinct solutions. However, by corollaries 1, 4, and 7, all three control problems have the same solution if the system has complete state information.
V. EXAMPLE Consider a periodic system as follows:
YJt) = t1 O 1 4 t ) (32.b) Y(kT) =y,(kT) + 4 k T ) (32 .c) where u(kT) k = 0,1,2, represents the measurement errors which are uniformly distributed in the interval (-0.1 0.1) (i.e., the correlation is R = 0.0033). Assume T = 1, E[x(O)x'(O)] = I,, f = 2, and a discrete-time performance index as follows:
x;(kT)Q,x,(kT)
+ y,LimE[x'(kT)Q,x(kT)].
(33)]
k + m - 1:m
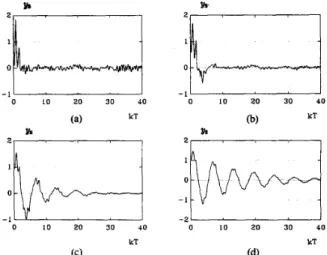
0 10 20 30 kT 40 (a) vs 2, I 0 10 20 30 40 kT (C)Fig. 2. The outDut resDonses of
$4 2 , I - I ' I 0 10 20 30 40 kT
0))
2 , YI I -e-
0 10 20 30 40 kT (d)linear Deriodic svstem (32) with the
-
multirate output feedback Eontroller 135).
By (51, one has
0.5403 0.8415 0.1952 -0.0845
(-0.8415 0.5403) = (0.1811 -0.2525). (34) By (31, the multirate output feedback controller is taken by
L,y(kT); L,y(kT);
for 0 I 0
<
T/2 for T/2 I 8<
T (35) u(kT+
e )
=where the gain L = [ L o L,]' E R2 is solved from the discrete- time algebraic Riccati equation (22). Four cases a): yd = 1,
y, = 0, b): yd = 1, y, = 600, C): yd = 1, y, = 6oO0, d): yd = 1,
y, = 30000 are solved. Their responses are also plotted in Fig. 2 (where x(0) is given by [l l]' for simulation). Notice that case a) is the LQR case. Although this case can yield a fast response, however, noise interruption is the worst. Also notice that by increasing the ratio ys, the ability of noise rejection is improved but the response becomes slow.
VI. CONCLUSION
In this note, a modified optimal algorithm for multirate output feedback controllers of linear stochastic periodic systems is developed. By combining the discrete-time LQR and SLQR control problems as the ELQR control problem, one derives a general optimal algorithm to extend the LQR and the SLQR algorithms, simultaneously. Such an algorithm allows one to choose ratios on the LQR and the SLQR control problems, so
that the presented multirate output feedback controller can balance the advantages between the optimal transient response of LQR control problem and the optimal steady-state noise regulation of SLQR control problem.
In general, all the solutions of LQR, SLQR, and ELQR algorithms are solved from a set of coupled matrix equations. Important special cases for which the coupled matrix equations can be reduced to a discrete-time algebraic Riccati equation are also discussed. The most significant case is the multirate state feedback control scheme derived by AL-Rahmani and Franklin [l], where the discrete-time quadratic performance index is transformed from a continuous-time quadratic performance in-
1 I
dex. However, complete state information may be a necessary condition for the reduction of coupled matrix equations if a continuous-time quadratic performance index is selected. This
difficulty can be overcome by using the classical separation (:; zg) ~ ~ ~ ~ ~ ~ : ~ ~ a ~ ~ ~ ~ ~ ~ ~ - ~ ~ ~
principle to give an optimal filter [8].
NOTATION:
The complex Plane. The vertex set of P”.
plynomials‘
E REFERENCES
H. M. U-Rahmani and G. F. Franklin, “A new optimal multirate control of linear periodic and time-invariant systems,” IEEE Trans. Automat. Contr., vol. 35, pp. 406-415, 1990.
-, “Linear periodic systems: eigenvalue assignment using dis- crete periodic feedback,” IEEE Trans. Automat. Contr., vol. 34, pp. M. C. Berg, N. Amit, and J. Powell, “Multirate digital control system design,” IEEE Trans. Automat. Contr., vol. 33, pp. 1139-1150, 1988.
S. Bittanti and P. Bolzem, “Stabilizability and detectability of linear periodic system,” Syst. Contr. Lett., vol. 6, pp. 141-145, 1985. S. Bittanti, P. Bolzem, and P. Colaneri, “The extended periodic Lyapunov lemma,” Automatica, vol. 21, pp. 603-605, 1985. S. Bittanti, P. Colaneri, and G. De Nicolao, “Periodic regulators with incomplete and noise measurements,” 29th Conf. Decisions Contr., Hawaii, Dec. 1990, pp. 3648-3649.
A. E. Bryson and Y.-C. Ho, Applied Optimal Control. Hemi- sphere: New York, 1975.
P. Colaneri and G. De Nicolao, “Optimal stochastic control of multirate sampled-data systems,” I European Contr. Conf., Greno- ble, France, pp. 2519-2513, 1991.
P. E. Caines and D. Q. Mayne, “On the discrete-time matrix Riccati equation of optimal control,” Int. J. Contr., vol. 12, pp. P. T. Kabamba, “Monodromy eigenvalue assignment in linear periodic systems,” IEEE Trans. Automat. Contr., vol. AC-31, pp. C. M. Ermer and V. D. Vandelinde, “Output feedback gains for a linear discrete-time stochastic control problem,” IEEE Trans. Au- tomat. Contr., vol. AC-18, pp. 154-157, 1973.
H. Kwakemaak and R. Sivan, Linear Optimal Control System.
New York: Wiley, 1972.
H. Kano and T. Nishimura, “Controllability, stabiliability, and matrix Riccati equation for periodic system,” IEEE Trans. Au- tomat. Contr., vol. AC-30, pp. 1129-1131, 1985.
J. OReilly, Optimal Low-Order Feedback Controllers for Linear Discrete-Time Systems, vol. 16, C. T. kondes, Ed. New York Academic; 1980, pp. 325-367.
H. J. Payne and L. M. Silverman, “On the discrete time algebraic Riccati equation,” IEEE Trans. Automat. Contr., vol. AC-18, pp. 99-103, 1989.
785-794, 1970. 950-952, 1986.
226-234, 1973.
Schur Stability
of
Interval Polynomials Y. K. Foo and Y. C. Soh@
I?;
n D
The exposed edge set of P“. A special subset of E;.
:= ([n/2]), the truncation of (n/2).
A simply-connected region which is symmetrical with respect to the real axis.
-
I. INTRODUCTION
The main contribution of the Kharitonov’s result [l] is the simplicity with which one can check the Hunvitz property of a family of interval polynomials. Several extensions of the Kharitonov-type results to other stability regions are also inter- esting and useful [2]-[5]. Unfortunately, the Kharitonov-type result does not apply to Schur stability [4], [5] unless the order of the interval polynomials is less than six [7]. Hence, in general
one has to rely on the edge theorem [6], [9] to check the Shur
property of interval polynomials. However, the computational load for checking the edges can be prohibitive since one gener- ally has to examine ( n
+
112” edges! Recently, Kraus et al. [8]have shown that the number of edges to be checked can be reduced to KH where K = 2”-” and H = (E
+
1)2”. In this note, we shall show that the critical edges can be drastically reduced to the order of 2n2.11. PRELIMINARIES
For real coefficient interval polynomials, our stability region D is symmetrical with respect to the real axis. This means that we only have to consider the Nyquist image of the whole family of polynomials on the upper plane since the Nyquist image on the lower plane is just the mirror image of the Nyquist image on the upper plane. For extensions to a family of complex coeffi-
cient interval polynomials, we need to derive two sets of bound- ing polynomials, one for the upper plane and one for the lower plane. Our first preliminary result states that the Nyquist image of P” at any z , E @ is a 2(n
+
1)-sided parpolygon.Proposition 2.1: Let P“ denote a family of real coefficient nth-order interval polynomials, i.e.,
p n = p ( z ) : p ( z ) = akzk
]
(2.1) where, in general, ak E [ a , , a L ] , k = O,l;.*,n, and 0 E[ a ; , a,’]. Then the Nyquist image of P” at any z , E @, i.e., P n ( z , ) , is a 2(n
+
1)-sided convex parpolygon (may be degener- ate) whose edges are at angles kOz0, k = 0, l;.., n, with respect to the positive real axis; Oz, denotes the phase of z,.n
i
k = 0Pro05 For any
z ,
= ~ x p ( j O z 0 ) x E @, the Nyquist image of Abstnrcl-h this note, we shall present a result for checking theSchur stability of interval polynomials. In particular, we are interested in the number of critical vertex and edge polynomials that are sufficient for inferring robust Schur stability.
p n is given by
n
P(exp ( j e z , ) x ) = uk(cos kezo
+
j sin kezo)Xk.k = 0
Manuscript received April 19, 1991; revised December 6, 1991 and April 24, 1992.
Y. K. Foo is with Leun Wah Electric Co., (Pte) Ltd, Singapore 0314, Republic of Singapore.
Y. C. Soh is with the School of Electrical and Electronic Engineering, Nanyang Techologicd University, Singapore 2263, Republic of Sings- pore.
IEEE Log Number 9205249.
Clearly, the Coefficients Of P(exp(JOzO)x) always lie On phase lines with angles kOzo, k = O,l;..,n, in the complex plane.
Hence, P(exp( jOz,)x) is a 2(n