Decision Feedback Differential Detection Using Weighted
Phase References
Ruey-Yi
Wei and
Mao-Chao
Lin
Department of Electrical Engineering, National Taiwan University, ROC
Abstract : A conventional decision feedback differential detection technique can be regarded as a technique us- ing L previously received signal samples and L
-
1 pre- viously decided data phases to generate a phase reference for the phase detection operation of a currently receivedM P S K signal sample. With this observation, we propose
a differential detection technique which uses a new way to generate the phase reference. In the proposed tech- nique, the phase reference called weighted phase reference is the weighted sum of primitive phase references derived from previously received signal samples. The weighted phase reference can be generated using a simple recursive form. The proposed detection technique can be easily im- plemented and has satisfactory error performance.
I
Introduction
For an M P S K transmission system, differential detec-
tion (DD) is preferred over coherent detection (CD) if phase coherence is hard to obtain. The conventional (one- symbol) differential detection technique uses the previously received signal sample as the phase reference to detect the currently received signal sample. Such a phase reference is likely to have been corrupted by noise. Hence, the er- ror performance of the conventional differential detection technique is somewhat worse than that of the coherent differential detection technique. To improve the error per- formance of differential detection, several multiple-symbol differential detection techniques have been proposed [l-71.
Among them, decision feedback differential phase detec- tion (DF-DPD) is the simplest one. The DF-DPD tech- nique is a simplified version of a technique called decision feedback differential detection (DF-DD). By setting all the amplitudes of received samples to be constant, DF-DD re- duces t o DF-DPD. The DF-DD (including DF-DPD) tech- nique employs L previously received signal samples and
L
-
1 data phases which were previously decided to detect the currently received signal sample. For applications over the additive white Gaussian noise (AWGN) channel, largerL will result in better error performances. However, the
complexity of DF-DD (including DF-DPD) with large L is
much higher than conventional DD.
In this paper, we show that the conventional DF-DD (including DF-DPD) can be detected using phase refer-
ences like the conventional DD. The difference is ithat the phase reference of the conventional DD is generated by the previously received signal sample while the phase ref- erence of the DF-DD (including DF-DPD) is generated by L previously received signal samples and L -- 1 pre- viously decided data phases. We note that there is still much room for decreasing the complexity of the conven- tional DF-DD (including DF-DPD). Hence, we propose a new DF-DPD called DF-DPD using weighted phase refer- ences (WPR) for which the phase reference can be easily generated by a simple recursive form. The weighted phase reference for detecting the currently received signal sample is the weighted sum of primitive phase references derived from previously received signal samples. In the weighted sum, the primitive phase reference derived from a more recently received signal sample provides a more signifi- cant contribution. The degree of the significance can be adjusted by varying the weight factor. In some applica- tions, the phase of a received signal sample is not available while the phase difference between a received signal and a delayed version of it is available. The recursive form for generating weighted phase references can be converted into an equivalent recursive form for generating weighted phase differences. The DF-DPD using WPR has the advantage of both low complexity of detection and good error perfor- mance.
In this paper, we also propose a technique called DF- DD using
WPR.
The DF-DPD using WPR is a simplified version of DF-DD using WPR by setting the amplitudes of received signal samples to be constant.I1
Decision Feedback Differential
Detection
In this section, we show that DF-DD [2-41 can be regarded as a technique which uses L previously received signal sam- ples and L
-
1 previously decided data phases to generate a phase reference for the phase detection operation of a currently received M P S K signal sample. Suppolse thatdifferentially encoded M P S K signals are transmitted over
an AWGN channel. Let r ( t ) be the received signal for
time
t.
Through some process, we have the received signal 0-7803-3692-5/960
1996 IEEEsample for time k , which is can be generated from the recursive form given by
where P is the signal power, q5k is the modulation phase, o k is an arbitrary phase introduced by the channel, and N k is a sample of zero-mean complex Gaussian noise. The modu- lation phase q!Jk = 2nm/M for some m
E
{O,1,. .
. ,
M - 1). The arbitrary phase o k is assumed to be uniformly dis- tributed in the interval ( - T , T ) . Define 2 mod 2n =x
+
2Kn, where K is an integer such that n<
x
+
2Kn5
T. The information data for time k is carried by the data phase A4k = (& - & - I ) mod 2n. We can expressf k by
T k
=I
r kI
e j @ k , (2)where
I
r k1
and$,+
are the amplitude and phase of the received signal T k respectively. w e have$k = ( 4 k
+
q k+
o k ) mod2n1 (3)where q k is the phase noise due to AWGN.
Consider a sequence of received signal samples of length
L
+
1. We assume that Bk is constant for all the samplesof this sequence. In a DF-DD algorithm [2-41, the decision rule is to decide the data phase A & for time n as the one out of all the M possible A& which maximizes
L i-1
Xn =
E e { C
rnr:-iexP(-j(A$n+
AJn-i))},(4)
i=l z=1
where A$,-, is the data phase which have already been chosen for time n - 1. This is equivalent to maximizes
L 1-1
where r:--i is the complex conjugate of rn-i and
which is a primitive phase reference for time n - 1 and is
derived from + n - l . Define
/Q
= ($n - A&-
*!Il)
mod 2~(7)
-
is an integer which is used such that --n
<
-( $ n - A& -
@,1"L,)
+
2K!Lln,where Kn--l (1)
( 1 )
/in
5
n. The parameter p g ) is an estimated phase errorof $n obtained by comparing $n with
In case that the phase $n is not available while the phase
+
Abn. difference A$n = $n-
4n-I
is available, the parameter pn ( E )for 1
>
1, for 1 = 1.(8) Since the shape of the curve of cos2 is similar to the shape of the curve of 1 - z2 for -T
<
x
5
n, we use anapproximation to simplify the decision rule of DF-DD. The simplified decision rule is to find the one among M possible Adn which minimizes
(9)
The minimization of Yn can be achieved if and only if
1=1
It follows from (10) and (11) that, the decision rule of DF- DD can be transformed into finding the the one among M
possible A& such that
where
When L = 1, this decision rule of DF-DD is identical to the decision rule of the conventional (one symbol) differ- ential detection. A DF-DD technique can be regarded as
a modification of the conventional (one-symbol) differen- tial detection by using & - ~ , D F as the phase reference to
replace
I11
Detection
Using
Weighted
Phase Reference
Decision feedback differential phase detection (DF-DPD) 171 is a simplified version of DF-DD, for which the decision
rule neglects the amplitude factor 1 rn-1
I
from Yn given in(9). That means the decision rule of DF-DPD is to decide
A& as the one among M possible A& such that
L
1=1
is minimized. With a procedure similar to that used for DF-DD, we can transform the decision rule of DF-DPD into finding A& such that
where $n-l,DFp is the phase reference for time n
-
1 ob- tained by averaging!P:ll,
. .
.,
@ n - l , (L) i.e., *Assume that feedback symbols AQjn-1,
.
.,
A$n-L+1 arecorrect. Inequality (15) implies that A& is correct if
where qn is the phase noise of $ f a ,
is the phase noise Of $n-l,DFP+A& and
qgll
is the phase+
A$n.The phase reference for time n, &,DFP, can be recur- sively derived from the phase reference for time n - 1,
$n-l,DFP. The relation is given by
noise of
!P!ll
+
~K,_,-A (1)1
~ D F P= $L
-
~ ) ( & - - I , D F P+
A&)+
(&.--~,DFP-
L+
*n+
2C ( K ? )
- K:L1)4. (19)1 1 1
This recursive relation is a bit complicated. Since both time n
-
1, we expect that the difference between them is small after the modulo 2n operation. Hence, we propose a new way of estimating the phase reference for time n, which has a simplified recursive relation that is obtained by phase reference for time n is denoted pn. The recursiverelation is given by
'$'n-l,DFP and @n-l (L) are estimated phase references for
removing the $ , - 1 , ~ ~ p
-
@n-l (L) term from (19). The newwhere Kn is an interger which is used such that
--A
<
(pn-l + A & )-
$n-
2Knn5
T . (21)We may consider pn as the weighted sum of two estimated
phase references, one of which is (pn-l
+
A&) and the other is $n+
2Kn71.S Hence, we call pn the weighted phasereference (WPR) for time n.
Then, we have a new differential detection technique called DF-DPD using weighted phase reference for which the decision rule is to find A+,+l such that
(22)
71 7r
--
<
an+,
L
- 1 Mwhere
Qn+l = ( $ n + l - Jon
-
A4n+1) mod 2 - ~ (23)Equivalently, the decision rule is to find A&+1 that min-
imizes
I
Rn+l1.
We can express Pn as the weighted sum of all the prim- itive phase references, i.e.,
n+l
pn = U : ) ( @ $ )
+
2J,$')w), for n2
0, (24)1=1
where J;" is an integer, = 0, u t ) = 1 and
The proof of (24) and (25) are omitted for brevity. In a conventional DF-DPD technique, L previously re-
ceived signal samples are used t o detect the current data
phase, where all these L received signal samples are treated
to be equally important and other signal samples are ne- glected. From (24) and (25), we see that in the DF-DPD using WPR proposed here, all the previously received sig- nal samples are taken into account while the more recently received signal sample provides more significant contribu- tion in detecting the currently received signal sample.
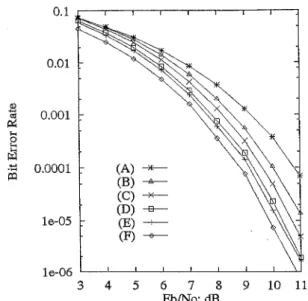
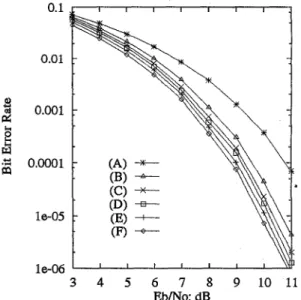
Simulation results for the AWGN channel are given in Fig. 1 and Fig. 2 which show that similar error perfor- mances can be achieved for L
=
2W+
1. For the ap- plication of the DF-DPD using WPR over a time-varying channel, if the varying speed is fast then a small W should be used; if the varying speed is slow then a large W may be used.In case that the phase $n is not available while the phase difference A$n = $n
-
$n-1 is available, we rewrite Qn+lby
Q n + l = ( A p n + l - A#n+l) mod 2 ~ 1 (26)
where Apn+l = 1Cln+1
-
pn.
The reference of phase differ-0.11 I I I I I 1 1 1
d
(Fj-
t
3 4 5 6 7 8 9 1 0 1 1 Eb/No: dBFigure 1: The error performance of DF-DPD for QPSK (A) conventional differential decoding. (B) DF-DPD with L=2.
(C) DF-DPD with L=3. (D) DF-DPD with L=5. (E) DF-DPD with L=7. (F) coherent decoding.
where J, is an integer which is used such that
The error performance of a DF-DPD using WPR with the recursive generation of Ap,+l = $,+I
-
pn is the same asthat of a DF-DPD using WPR with the recursive genera- tion of p,.
IV
Modified Weighted Phase Ref-
erence
In section 111, the proposed weighted phase reference is ob- tained by ignoring the amplitudes of received signal sam- ples. We may slightly modify the recursive form given in (20) by including the amplitudes of recieved samples.
The modified weighted phase reference for time n
+
1which takes the amplitude factor into account is
0.1 0.01 0.001 0.0001 le05 3 4 5 6 7 8 9 1 0 1 1 Eb/No: dB
Figure 2: The error performance of DF-DPD using weighted phase references for QPSK
(A) conventional differential decoding. (B) DF-DPD using WPR with W=l. (C) DF-DPD using WPR with W=2. (D) DF-DPD using WPR with W=3. (E) DF-DPD using WPR with W=6. (F) coherent decoding.
where
Ji"
is an integer,Jil)
= 0, a:' = 1 and(31)
Since each
1
r,I
is close tonatio, we can simplify the recursive relation of p, to be for large signal to nosie
W ( p n - I + A&)
+
(I
~nI
,")($n+
2 K n n )w + 1
Pn E
(32) With the modified weighted phase reference pn and the de- cision rule of finding A&+l by minimizing
I
a n + ~
l, where
a,+,
is given in (23), we have the DF-DD using weighted phase references technique. Fig. 3 shows the simulation results of DF-DD and Fig. 4 shows the simulation results of DF-DD using weighted phase references, where AWGN channel is assumed.The recursive form for generating Apn+l which is equiv- alent to the recursive form for generating pn given in (29) is given by
(33) where J , is an integer which is used such that
8
2
Zi
E
W U 0 . 1 1 1 I I I I I , J 0.01 0.001 0.0001 10-05 le06 3 4 5 6 7 8 9 1 0 1 1 Eb/No: dBFigure 3: The error performance of DF-DD for QPSK (A) conventional differential decoding. (B) DF-DD with L=2. (C) DF-DD with L=3. (D) DF-DD with L=5. (E) DF-DD with L=7. (F) coherent decoding.
V
Conclusions
The conventional (one-symbol) differential detection for differentially encoded M P S K signals has the merit of low complexity while the error performance is somewhat sacrificed as compared to the coherent detection. There were several techniques of differential detection such as DF-DD (including the simplified version, DF-DPD) which improves the error performance but appreciably increase the complexity. The new technique proposed in this pa- per called decision feedback differential detection using weighted phase references (including the simplified version, DF-DPD using weighted phase references) employs a sim- ple recursive form t o generate phase references for detec- tion. The new technique can also be implemented by using a simple recursive form to generate references of phase dif- ferences for detection. In addition to the low complexity needed for detection, the proposed technique also has good error performance.
References
0.1 0.01 0.001 0.0001 le05 le06c
I I I I I I I I W 3 4 5 6 7 8 9 1 0 1 1 Eb/No: dBFigure 4: The error performance of DF-DD using weighted phase references for QPSK
(A) conventional differential decoding. (B) DF-DD using WPR with W=l. (C) DF-DD using WPR with W=2. (D) DF-DD using WPR with W=3. (E) DF-DD using WPR with W=6. (F) coherent decoding.
F. Edbauer, “Bit error rate of binary and quaternary DPSK signals with multiple differential feedback de- tection,” IEEE Trans. Commun., vol. 40, pp. 457-460,
March 1992.
H. Leib and S. Pasupathy, “The phase of a vector perturbed by Gaussian noise and differentially coher- ent receivers,” IEEE Trans. Inform. Theory, vol. 34,
pp. 1491-1501, NOV. 1988.
F. Adachi and M. Sawahashi, “Decision feed- back multiple-symbol differential detection for M-ary DPSK,” Electroc. Lett., vol. 29, pp. 1385-1387, July
1993.
D. Makrakis and K. Feher, “Optimal noncoherent detection of PSK signals,” Electron. Lett., vol. 26,
pp. 398-400, Mar. 1990.
F. Adachi and M. Sawahashi, “Viterbi-decoding dif- ferential detection of DPSK,” Electron. Lett., vol. 28,
pp. 2196-2197, NOV. 1992.
F. Adachi and M. Sawahashi, “Decision feedback dif- ferential phase detection of M-ary DPSK signals,” IEEE Trans. Veh. Technol., vol. 44, pp. 203-210, May 1995.
[1] D. Divsalar and M.K. Simon, “Multiple-symbol differ- ential detection of MPSK,” IEEE Trans. Cornmun.,