順滑控制在降壓型直流轉換器之應用
81
0
0
全文
(2) 順滑控制在降壓型直流轉換器之應用. Sliding-Mode Control Applied to Buck DC-DC Converter Design 研 究 生:吳坤祐. Student:Kun-You Wu. 指導教授:陳永平 教授. Advisor:Prof. Yon-Ping Chen. 國 立 交 通 大 學. 電機學院 電機與控制學程 碩 士 論 文. A Thesis Submitted to College of Electrical and Computer Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical and Control Engineering June 2007 Hsinchu, Taiwan, Republic of China. 中華民國九十六年六月.
(3) 順 滑 控 制 在 降 壓 型 直 流 轉 換 器 之 應 用. 研究生:吳坤祐. 國立交通大學. 指導教授:陳永平 教授. 電機學院. 電機與控制學程碩士班. 摘. 要. 本文研製之順滑模態控制器應用在降壓型直流轉換器電路,改善過去使用誤 差狀態方程式設計順滑模態控制器時必須掌握負載狀況的缺點,以及為了估測負 載降低系統精確度與響應速度的缺點。我們利用轉換矩陣法選取一順滑函數,並 額外加入輸出電壓與命令電壓之誤差函數的積分,使系統在順滑平面上是穩定 的,再決定系統的控制法則,使系統軌跡在有限時間內接觸到順滑平面。本文利 用此順滑模態控制器產生控制開關狀態的責任週期,經由固定頻率切換的脈波寬 度調變控制 Buck 直流轉換器,使其輸出電壓到達期望值,並且不因負載變動影 響系統之穩定。利用 MATLAB/SIMULINK 模擬上述直流轉換器與順滑模態控制器, 由模擬結果驗證系統對於不同負載均能產生穩定的責任週期,使輸出電壓到達正 確值,而且當負載變動時,控制器也具有不錯的暫態響應。. 關鍵字:降壓型直流轉換器,順滑模態控制器,誤差函數之積分 i.
(4) Sliding-Mode Control Applied to Buck DC-DC Converter Design. Student:Kun-You Wu. Advisor:Prof. Yon-Ping Chen. Degree Program of Electrical and Computer Engineering National Chiao Tung University. ABSTRACT. A sliding mode controller with the error integration between output voltage and command voltage for PWM-based Buck DC-DC converter is proposed. Constant switching frequency can be achieved with the proposed approach. For the controller design, this thesis adopts sliding mode control theorem because of its well-know robustness for system uncertainty. Without load estimator in the controller, this closed-loop system ideally should convert power flow into the prescribed form in spite of the load variation. With the unknown load condition we choose a sliding function with an integral term of error function such that the system is stabilized on the sliding surface. Then design the control algorithm such that the system reaches the sliding mode in a finite time. The simulation of the proposed closed-loop control scheme is illustrated to process fast transient response and robustness to load variation.. Keywords:Buck DC-DC Converter,Sliding-Mode with Integral. ii.
(5) 致. 謝. 學如逆水行舟,一路癲頗行來,點滴在心,雖然自認這不是一部完美的論文, 但這部論文的完成,要感謝的真的人很多,僅以此文表達我的誠摯謝意。 首先要感謝陳永平教授引領我進入學術的殿堂,每當我遇到瓶頸時,總是引 領我正確的思考方向,同時也啟發我人生的視野與生涯規劃。還要感謝兩位口試 委員梁耀文老師及張浚林老師的指正和協助,使我獲益良多。 論文能順利付梓,幸賴許多學長協助。感謝聖棟,煥祺,建峰,世宏,福貴, 秉儒學長們,與 VSSLAB 的全體同學。此外更有賴許多同事及摯友,感謝陳倫典 先生與鄔家瑜先生兩位主管的推薦;同事提梵,耀文,厚億從旁鼓勵;摯友老雷, 大頭東,思漢,璟照的協助。掛一漏萬,尚有未提及的朋友,在此均一併致謝。 最後要感謝內人宣君給了我一雙兒女,讓我在低潮時能夠看到佩芸與昱賢天 使般的微笑,好像在訴說著:爸爸加油!一股振作的情緒就會再次油然而生!我 知道,若不是他們長久以來的犧牲與支持,不可能有我今日的小小成果。 兩年碩士生活隨著論文結束而終止,還記得當初剛參與交大研究所考試之 際,心情忐忑不安,一路走來憑靠著自己的努力及許多貴人的協助,使我能夠順 利至此。對我而言,雖然這段旅程已經結束,但象徵著另一個階段的到來;學習 的路不在誰走得快,而在誰走得遠,期許自己在下個階段能夠更加精進!. iii.
(6) 目. 錄 頁次. 中文摘要 英文摘要 致謝 目錄 表目錄 圖目錄 符號說明 第一章 緒論 研究背景……………………………………………………. 1.1 文獻回顧……………………………………………………. 1.2 研究方法與本文架構………………………………………. 1.3. i ii iii iv vi vii ix 1 . 第二章 Buck DC-DC Converter 之數學模型 狀態空間平均法建立切換式電源轉換器之數學模型……. 2.1 電路結構…………………………………………………..... 2.1.1 動作原理……………………………………………………. 2.1.2 狀態空間法建立模型………………………………………. 2.1.3 考慮非理想 Buck DC-DC Converter 之狀態方程式………. 2.2 片段線性模型………………………………………………. 2.2.1 利用狀態空間法建立 Buck DC-DC Converter 之模型……. 2.2.2 模型分析……………………………………………………. 2.3 穩定性與控制性……………………………………………. 2.3.1 不確定量分析………………………………………………. 2.3.2. 6 6 7 8 11 14 14 16 20 20 22. 第三章 Buck DC-DC Converter 之順滑控制器設計 順滑模態控制理論介紹……………………………………. 3.1 順滑模態控制原理…………………………………………. 3.1.1 順滑函數之選擇-以單輸入雙線性系統為例……………. 3.1.2 設計 Buck DC-DC Converter 之順滑控制器………………. 3.2 選擇順滑函數………………………………………………. 3.2.1 誤差函數積分項在順滑函數中的影響……………………. 3.2.2 控制法則……………………………………………………. 3.2.3. 24 24 25 31 34 35 38 41. iv . 1 3 5.
(7) 第四章 Buck DC-DC Converter 之系統設計與模擬 系統規格與設計……………………………………………. 4.1 電感設計……………………………………………………. 4.1.1 輸出電容設計………………………………………………. 4.1.2 順滑模態控制器設計………………………………………. 4.1.3 數值模擬……………………………………………………. 4.2 數值模擬,未加入控制器輸出飽和函數…………………. 4.2.1 數值模擬,加入控制器輸出飽和函數……………………. 4.2.2 以 MATLAB/SIMULINK 的電力電子模組模擬………….. 4.3 高負載模擬…………………………………………………. 4.3.1 低負載模擬…………………………………………………. 4.3.2. 43 43 44 46 48 50 51 54 58 59 61. 第五章 結論與未來展望 參考文獻 ………………………………………………………………. 附 錄 ……………………………………………………………….. 65 66 69. v .
(8) 表. 目. 錄 頁次. 表一 表二. 系統規格……………..……………………………………... 濾波器參數………………………………………………….. vi . 43 48.
(9) 圖. 目. 錄 頁次. 圖 1.1.1 圖 2.1.1 圖 2.1.2 圖 2.1.3 圖 2.1.4 圖 2.1.5 圖 2.1.6 圖 2.2.1 圖 2.2.2 圖 2.2.3 圖 2.2.4 圖 2.2.5 圖 2.2.6 圖 3.1.1 圖 3.1.2 圖 3.1.3 圖 3.1.4 圖 3.1.5 圖 3.1.6 圖 3.2.1 圖 3.2.2 圖 4.1.1 圖 4.1.2 圖 4.1.3 圖 4.1.4 圖 4.2.1 圖 4.2.2 圖 4.2.3 圖 4.2.4 圖 4.2.5. 行動媒體播放器(PMP, Portable Media Player)之電源規畫 利用狀態空間平均法建立切換式電源轉換器之數學模型 Buck DC-DC Converter……………………………………... 理想 Buck DC-DC Converter 之等效電路…………………. 點電壓 A 之波形……………………………………………. Buck DC-DC Converter 電感電壓與電流波形…………….. 不同責任週期與負載條件下,灰色區域為平衡點之集合.. N 通道 MOS-FET 片段線性模型…………………………… 二極體片段線性模型………………………………………. 以非理想模型取代之 Buck DC-DC Converter……………. 開關置於 1 之等效電路與電流方向………………………. 開關置於 0 之等效電路與電流方向………………………. 固定系統參數,方程式(21)之數值模擬結果……………… 切換函數與切換條件之關係圖……………………………. 迫近模態與順滑模態………………………………………. 迫近條件式意圖……………………………………………. 當系統軌跡進入順滑平面,延遲 td 的時間才能切換輸入 控制…………………………………………………………. 飽和函數改善(34)式造成的高頻跳切現象……………….. 灰色區間為迫近與順滑區間…………………………........ 加入積分器後,系統特徵值的變化………………………. 灰色區間為 Buck 直流轉換器之迫近與順滑區間……….. Buck 直流轉換器之狀態 (假設電感電流是連續的)…….. 責任週期對電感電流曲線圖………………………………. 穩態時輸出電壓鏈波………………………………………. 控制器輸出責任週期之範圍………………………………. 模擬系統方塊圖……………………………………………. 固定回授電壓………………………………………………. 高負載時系統狀態軌跡……………………………………. 未加入飽和函數之控制器輸出……………………………. 順滑函數……………………………………………………. vii . . 2 6 7 8 8 10 11 12 13 15 16 15 19 25 26 26 28 30 33 40 42 44 45 46 49 50 51 52 52 53.
(10) 圖 4.2.6 圖 4.2.7 圖 4.2.8 圖 4.2.9 圖 4.2.10 圖 4.2.11 圖 4.3.1 圖 4.3.2. 54 54 55 55 56 57 58. 圖 4.3.4. 控制器加入飽和函數後之系統軌跡………………………. 狀態輸出……………………………………………………. 負載增加 500mA 時系統輸出之狀態……………………… 負載減少 500mA 時系統輸出之狀態……………………… 加入控制器飽和函數之順滑函數…………………………. 控制器輸出…………………………………………………. PWM 訊號產生器…………………………………………. 未加入正反器導致 PWM 產生器與控制器輸出產生追逐 現象,無法關閉開關……………………………………… 加入 PWM 產生器轉換責任週期為脈波調變信號時,系 統軌跡……………………………………………………… 高負載時系統輸出狀態……………………………………. 圖 4.3.5 圖 4.3.6 圖 4.3.7 圖 4.3.8. 高負載時順滑函數模擬結果……………………………… 高負載時控制器輸出模擬結果…………………………… 低負載時模擬系統軌跡…………………………………… 低負載時模擬系統狀態輸出………………………………. 圖 4.3.9 圖 4.3.10 圖 4.3.11 圖 A.1. 低負載時模擬系統順滑函數……………………………… 低負載時模擬系統控制器輸出…………………………… 不同目標電壓,系統之輸出電壓波型……………………. 60 61 62 63 63 64 64. 系統主方塊圖……………………………………………… 控制器……………………………………………………… 系統數值模型……………………………………………… 以 SimPowerSystems 建立系統模型……………………….. 69 69 70 70. 圖 4.3.3. 圖 A.2 圖 A.3 圖 A.4. viii . 58 59 60.
(11) 符. c. x2d. ε β A b N. 號 說. :順滑函數之係數向量 :目標電壓 :順滑層單邊厚度 :誤差函數積分項之係數 :系統狀態矩陣 :輸入向量 :雙線性項係數矩陣. ix . 明.
(12) 第一章. 緒論. 1.1 研究背景 隨著科技的日新月異與無線網路的進步,數位資訊散布在我們生活周遭,來 源不再僅限於書房的電腦,還有輕薄短小的手持式電子裝置,使得數位資訊唾手 可得。電子產品體積隨著半導體製程技術的提升而縮小,然而其電源裝置不僅效 率因為工作時間增加而提高,額定容量也因為系統的複雜度而提高。在電源電路 的設計上,負載端的變化不再僅限於產品本身,還有可能必須提供外接產品足夠 的電源。以 USB 2.0 為例,主機端 ( host ) 的電源設計必須提供每一條 USB 外部 連接線至少 5V/500mA 的電源,並符合下列兩項規格[1, 2]: (1) 直流穩態電壓最小值,4.75V (2) 當外部 USB 周邊掛載(Hot Plug-in),僅允許最小壓降(4.65V)與最短暫態 (幾十微秒,μSecond)。 在 PC 主機板電源設計規範中,USB 連接器上面的電源範圍為 5.00V±5%,換 言之,主機端的最小電壓必須維持在 4.75V,當外部 USB 產品掛載後其最小壓降 限制在 4.65V 以上,並在幾十微秒上升到最小電壓值(4.75V)。如圖一所示,在系 統硬體設計初期評估電源需求,對每一個電壓準位(Bus)所需提供的負載做設計, 進而選用適當的電源電路與元件。從圖 1.1.1 可知,電源轉換器面對的負載是不確 定量但是有界的,可以知道負載變化範圍。當外部裝置掛載,例如圖中 USB BusPower,在系統正常工作下額外提高 2.5W 的輸出,系統仍需維持穩定且壓降 必須符合上述規範。. ‐ 1 ‐ .
(13) LPF D_5V 5V 0.85A. DC-Line in Power Management. LPF A_5V LPF D_33V. 3.3V 0.3A. LPF A_33V. 1.8V 0.04A. LPF. USB BusPower Flash Memory EEPROM SRAM Audio Amp Audio DAC. 5V/500mA 5V/50mA 5V/3mA 5V/80mA 5V/200mA 5V/6mA. V_I/O33 V_core33 V_A_I/O33. 3.3V/90mA 3.3V/75mA 3.3V/60mA. V_core18. 1.8V/40mA. BAT. LCD Pannel. 圖 1.1.1 行動式多媒體播放器(PMP, Portable Media Player)之電源規畫 隨著開關元件工作頻率的提高允許切換式電源供應器(SPS, Switching Power Supply)的工作頻率增加,不僅切換頻率造成的噪音因而降低,在低通濾波器的設 計上電感值可選用較低感值元件,不僅體積更小,等效串連阻抗 ( ESR ) 也相對 降低。故高頻切換式電源供應器具有以下特點: (1) 低功耗,效率高,可達 80%以上 (2) 重量輕,體積小的優點。 (3) 輸出與輸入電壓範圍大。 (4) 反應時間短,較佳的暫態響應。 (5) 高功率密度,高輸出電流能力。 對系統設計而言,電源系統必須有效率地提供精確且穩定的輸出電壓,容許 系統負載在有限範圍內變化。從控制器的角度來看,系統面對負載的不確定與有 限範圍的變化,系統必須是穩定的。. ‐ 2 ‐ .
(14) 1.2 文獻回顧 由於半導體製程技術的進步以及電力電子相關控制理論的發展,切換式電源 轉換器廣泛應用在電腦產品,消費性電子產品,直流馬達控制,與通訊裝置上 [3-5]。許多研究先進專注在切換式電源供應器的控制方法,並基於高速切換的脈 波寬度調變(pulse width modulation,PWM)設計導通責任週期(duty cycle)[6]。 因為藉由改變脈波寬度影響開關切換的時間,直流切換式電源轉換器(DC-DC Converter)是一個非線性時變(Nonlinear Time-varying)系統[7],過去控制方法的研 究主要著重在線性控制,例如 PID 控制法 (proportional integral derivative control),與其他非線性控制方法,例如順滑模態控制法 (Sliding mode control), 模糊控制法 (Fuzzy control),以及結合上述方法與其他最佳控制之方法,將這些 方法應用在線化直流電壓轉換器的控制器設計上。典型控制方法(P,PI,PID)在 完整的線性化數學模型上可以設計出不錯的暫態響應與穩態響應,然而缺點是系 統參數必須精確且固定,系統面對的負載也是已知的明確值,方可完成設計要求。 順滑模態控制在電力電子的領域中,已經被廣泛的研究與應用,特別是在切 換式電源轉換器的設計上,其原因是,順滑模態控制不像典型控制方法建構在精 確的數學模型上,且順滑模態控制允許參數在有界範圍內變動,亦即負載是在可 知的範圍內變動,仍可維持系統的穩定,再者,系統因為開關的狀態切換成不同 的子系統,就以系統的角度而言,系統隨著開關狀態是可變的,故可以思考可變 結構控制理論在此領域的適用性。在過去順滑模態控制設計步驟中,採用狀態誤 差做為新的狀態變數,利用此控制法則將誤差函數的軌跡控制到原點,則實際系 統狀態輸出即被控制到狀態期望值(desired state)[8, 9],或稱之為穩態平衡點,其 缺點是必須知道負載值方可求出狀態期望值,而且負載改變將影響順滑平面在相 ‐ 3 ‐ .
(15) 平面中的斜率[10],因此順滑函數之斜率與負載有關,為此加入適應性控制 (Adaptive Sliding Mode Control)[7]來估測負載值並隨時修正系統的參數。 在無法估測平衡點位置的條件下,為了消除輸出電壓的穩態誤差,本論文引 用[11, 12]具有積分之順滑函數(sliding mode control with integral)設計降壓型直流 轉換器之順滑模態控制器,並採用飽和函數取代切換函數以降低系統跳切現象。 相較於前述之控制器,此控制器除既有滑模態控制的優點,例如允許系統參數的 變化與不確定值,還有無需估測負載與對負載變動具有強健性的優點,並且因為 加入積分器,所以可以消除穩態誤差。 利用電腦模擬結果在今日電力電子與控制器的設計中占有極重要的部分 [13],因為利用電腦模擬,可以降低開發成本與時程,並且在模擬過程中有助於 驗證系統相關之規格,例如穩定性與單一參數變化對系統的影響。在電力電子領 域的教授與研究者利用 PSPICE 模擬轉換器的行為[14-16],所以 PSPICE 在電力 電子的研究中占有極重要的部分。PSPICE 利用電路元件之物理特性模擬半導體 或開關元件,其優點是,模擬結果接近實際電路的電路特性,然而模擬時時常遇 到收斂性問題[17]。 在使用上,PSPICE 必須依據元件的規格書建立模型,或請廠商提供標準資 料庫匯入 PSPICE 中使用,然而元件的行為僅與其中主要特性有關,線性化或採 用片段線性的方式將有助於降低系統運算的資料量與記憶體需求,在 MATLAB/ Simulink 這套模擬軟體具有此一優點[16-17]。在最新版 MATLAB 7/ Simulink[18, 19]中包含了 SIMPOWERSYSTEM 模組,裡面提供電力系統與電力電子相關之片 段線性模型,優點是,建立模型的方式可以更有彈性,模擬時間遠小於前述模擬 工具,可以視為數學模擬工具,也因此其缺點,相較於 PSPICE 電路模擬,與實 際電路之行為仍有差距,然而對系統設計而言,這是相當不錯的設計輔助工具。 ‐ 4 ‐ .
(16) 1.3 研究方法與本文架構 利用狀態空間平均法建立 Buck 直流轉換電路的模型,因為考慮開關元件之 片段線性模型,所以建立之轉換器模型考慮實際電路的非理想特性,此系統不再 是傳統的線性系統模型。 利用順滑模態控制的強健性與積分型控制器消除穩態誤差的優點,將此非線 性的系統做適當的控制,並且因為系統參數的不確定項以順滑模態控制加以限制 降低其影響,所以系統仍能穩定在平衡點。 在第二章中,先討論 Buck 直流轉換器之電路結構與動作原理,以及狀態空 間平均法(State Space Average Method)建立此轉換電路之數學模型。第二節簡介開 關原件之片段線性模型,亦即非理想模型,再由前述建立模型的方法建立非理想 Buck 直流轉換器之模型。第三節則針對此一模型做進一步分析。第三章的第一 節,以介紹順滑模態控制為主,說明此一控制器之設計步驟。在第二節開始設計 Buck 直流轉換器之順滑模態控制器。 第四章設計模擬系統與相關參數之選定。第二節利用數值模擬的方式驗證控 制器是否在數值分析上達到我們的設計目標。第三節加入脈波寬度調變以及利用 SimPowerSystems 以近似電路特性的模擬方試驗證控制器對負載不確定與負載變 動的強健性。第五章為本文的結論與未來展望。. ‐ 5 ‐ .
(17) 第二章 Buck DC-DC Converter 之數學模型 在本章的第一節將介紹目前普遍使用於切換式電源轉換器建立模型的方法, 亦即以狀態空間平均法(State-space Average Method)建立 Buck DC-DC Converter 的數學模型,第二節說明非理想元件模型取代電路元件成為非理想 Buck DC-DC Converter,以及建立轉換器模型的詳細步驟,在第三節則針對此一模型做進一步 分析。. 2.1 狀態空間平均法建立切換式電源轉換器之數學模型 Middlebrook[8]提出一狀態空間平均法(state-space averaging technique)建立切 換式電源轉換器的線性化模型,包含功率級電路與 PWM 控制器在穩態點的線性 化數學模型。如圖 2.1.1 所示,摘錄自[8]說明應用於順滑模態控制所需之系統狀. perturbation. 態方程式的建立流程。本節將依此流程建立 Buck 直流轉換器之數學模型。. interal Ts d ':. x = A1 x + b1u. x = A2 x + b2u. x = Ax + bu A A1d +A2 d '. b b1d + b2 d ' Hybrid modeling. interal Ts d :. 圖 2.1.1 利用狀態空間平均法建立切換式電源轉換器之數學模型[8]. ‐ 6 ‐ .
(18) 2.1.1. 電路結構. 如圖 2.1.2 所示為 Buck DC-DC Converter 之基本電路型式,包含開關元件與 低通濾波器兩部分,輸入端外接一理想直流電壓源 (E),輸出端負載假設為一純 電阻性負載,以電阻 (RL) 表示之。在行動裝置系統電源設計實務上,我們會先 評估某一電壓準位提供周邊主動元件所需的功率,可估算出此等效電阻之值。. 圖 2.1.2 Buck DC-DC Converter 開關元件之狀態由外部控制信號控制,當控制命令為導通狀態,代表開關 S (MOS-FET) 導通,開關 D (Diode) 則因為逆向偏壓而截止。反之若為截止狀態, 則開關 S 為截止,開關 D 呈導通狀態。因為開關的導通與截止,開關元件的輸出 端電壓波形可視為一週期性方波,除直流亦含有高頻交流諧波。 假設控制信號輸出 PWM 控制信號為固定頻率切換,且其切換頻率遠高於低 通濾波器之截止頻率,故可以利用低通濾波器隔離上述之交流諧波,在系統輸出 端獲得直流電壓輸出。因為半導體製程的進步,允許 MosFET 的操作頻率提高, 所以開關元件之操作頻率可高達 MHz 等級,一般常見知電源轉換控制器其操作 頻率為 100KHz~300KHz,為了增加模擬效率,本論文假設 PWM 控制信號工作於 40KHz 以增加模擬時的時間間隔(Time Steps)。 ‐ 7 ‐ .
(19) 2.1.2. 動作原理. 在圖 2.1.3 為理想的 Buck DC-DC Converter 之等效電路,所謂理想的轉換器 代表該電路中非電阻元件均無功率消耗。以 MOS-FET 為例,其等效電路可視為 無損失單軸單輸出開關 (SPST,single pole single throw) ,狀態由外部控制器控 制該開關為導通或截止,而二極體之理想等效電路亦可以無損失單切開關取代。 合併兩單軸單輸出開關後,圖 2.1.2 的開關元件以一個單軸雙輸出開關 (SPDT, single pole double throw) 取代 S 與 D,如下圖所示。. 圖 2.1.3 理想 Buck DC-DC Converter 之等效電路 當開關 S 置於 1 為導通狀態,A 點電壓等於輸入電壓,反之若開關 S 置於 0 為截止狀態,A 點電壓等於零,波形如圖 2.1.4 所示。. VA(t) Ton: 開關元件導通. Toff: 開關元件截止. E Vout,DC. d=. t Ton. Toff T. 圖 2.1.4 A 點電壓之波形. ‐ 8 ‐ . Vout , DC =. Ton Ton + Toff. E × Ton = E×d T.
(20) d 定義為開關元件導通責任週期(duty-cycle),根據傅立葉分析可知,A 點電 壓為一週期性方波,包含直流成份與奇次諧波,其直流成份可表示為. VA, DC =. 1 T. Ton. ∫ V ( t ) dt = E × d. (1). A. 0. 為了在輸出端得到理想的直流電壓,利用低通濾波器隔離因為開關元件狀態切換 所產生的高頻成分,可得 Vout , DC = VA, DC 。由此可知,輸出電壓等於輸入電壓乘上 責任週期,又 0≦ d ≦1,故理想輸出電壓值最高等於輸入電壓,最低等於零,此 為降壓型直流轉換器之基本特性與原理。 隨著負載的改變,輸出電流的平均值也隨著變化,然而在低通濾波器的電感 電流因為其磁場特性限制電流方向無法瞬間改變,此一類型轉換器可分為連續操 作模式(CCM,continuous-conduction mode)與非連續操作模式(DCM,discontinuous -conduction mode)。如圖 2.1.5(a)所示,實線為電感電流波形,虛線為電感電壓波 形,圖中電感電流恆正為連續導通模式(CCM)。當開關 S 為導通狀態時,如圖 2.1.5(c)所示,因電源對電感充電故電流上升,同時對電容充電且此時在負載上面 就會有帶極性電壓產生,假設系統此時操作於穩態,電容充電時間可忽略,則電 感上的壓降為 E-Vo,此時二極體 D 因為逆偏狀態而截止。若開關為截止狀態, 如圖 2.1.5(d)所示,電感因磁場改變電壓反向,負載由電容提供能量,因此輸出電 壓不變且電感兩端的壓降為-Vo,此時二極體順向偏壓且提供電感電流導通路徑, 故此二極體 又稱之為飛輪(flywheel)或自由轉輪(free-wheeling)二極體。 在開關交替變化下,使得電感電流變化範圍在 I L(max) 與 I L(min) 之間。假設存在 I L(min) < 0,如圖 2.1.5(b)所示,因為電感電流必須衡正,所以非連續導通模式(DCM). ‐ 9 ‐ .
(21) 存在第三種狀態,在此狀態下電感電流為零,換言之,電感電流是不連續的。當 電感電流為零,此時負載所需的電流由輸出電容提供,所以負載端的電壓會迅速 下降。. 圖 2.1.5 Buck DC-DC Converter 電感電壓與電流波形 從圖 2.1.5(a)與(b)可知,電感電流存在一邊界值 IL(bound)使得系統分為連續與 非連續操作模式,其中 iL ( t ) =. ( E − Vo ) t + I L. (2). L ( min ). 令 I L(min) = 0 ,可得此一邊界條件:. I L ( bound ) =. TE 1 ( E − Vo ) ton = S d (1 − d ) L 2 2L. 其中 TS 為開關時間且 TS = t on +toff 。. ‐ 10 ‐ . (3).
(22) 2.1.3 狀態空間法建立模型 本論文採用狀態空間平均法 ( State-Space Averaging Approach ) 建立 Buck DC-DC Converter 之模型[8],該方法於 1977 年 Middlebrook 與 Ćuk 提出,為目 前切換式電壓轉換器建立模型的主要方法。在單一的開關時間 TS 內平均兩個因為 開關切換而分別存在的狀態表示法,為狀態空間平均模型,包含穩態(Steady-State DC model)與小信號模型(Small signal AC model)。步驟如下: 步驟一: 依開關狀態建立電路的狀態方程式 假設切換式電源轉換器工作於連續導通模式,存在兩種電路狀態:當開關導 通時可得一狀態方程式,如(4)式所示;當開關截止時可得另一狀態方程式,如(5) 式所示。若滿足開關之切換頻率遠高於低通濾波器之截止頻率,令狀態變數 x 分 別為電感上的電流 x1 = iL (t ) 與電容上面的電壓 x2 = vC (t ) 。. ⎧ x = A1 x + b1 ⎨ ⎩ vo = c1 x. 當開關為導通狀態. (4). ⎧ x = A2 x + b2 ⎨ ⎩ vo = c2 x. 當開關為截止狀態. (5). 其中 A1與A2 為系統狀態矩陣, b1與b2 為輸入向量, c1與c2 為輸出向量。 步驟二: 利用責任週期(d, duty-cycle)取狀態變數之平均 設開關導通時間為 d × Ts ,則截止時間為 (1- d ) × Ts ,分別乘上該狀態之狀態 方程式後取時間平均,可得. ‐ 11 ‐ .
(23) x = ( A1 × d +A2 × (1 − d ) ) x + ( b1 × d +b2 × (1 − d ) ). (6). 同理可得. vo = ⎡⎣c1d + c2 (1 − d ) ⎤⎦ x. (7). 步驟三: 分離狀態方程式為直流與交流兩部分 令 x = x + x ,其中 x 為狀態變數 x 的穩態值, x 為狀態變數 x 的時變擾動。 同理令 d = d + d ,其中 d 為定值,可視為期望的責任週期(desired duty-cycle),d 為 時變責任週期,可視為期望責任週期的擾動量。代入(6)式可得. x = x = Ax + b + Ax + ⎡⎣( A1 − A2 ) x + (b1 − b2 ) ⎤⎦ d + ( A1 − A2 ) xd. (. ). (. 其中 A = A1d + A2 1 − d , b = b1d + b2 1 − d. (8). ). (8)式為狀態空間平均模型,假設此一電路經過適當的控制到達平衡點,該平衡點 上的狀態方程式即為直流模型(dc model),如方程式(9)所示。. Ax + b = 0. (9). 換言之,從(9)式可求得系統之平衡點。(9)式代入(8)式可以化簡為. x = Ax + ⎡⎣( A1 − A2 ) x + (b1 − b2 ) ⎤⎦ d + ( A1 − A2 ) xd. 同理可得. ‐ 12 ‐ . (10).
(24) vo = Vo +vo = ⎡⎣c1d + c2 (1 − d ) ⎤⎦ ( x + x ) = cx + cx + ⎡⎣( c1 − c2 )( x + x ) ⎤⎦ d. (. 其中 c = c1d + c2 1 − d. (11). ). 穩態輸出電壓為 Vo = cx =cA−1b. (12). 在推導上述方程式的過程中,我們已經假設系統狀態在固定時間內被切換且 工作於連續導通模式(Continuous Conduction Mode,CCM)。當系統以適當控制進 入平衡點,從方程式(9)式可知,在固定輸出電壓的條件下可得責任週期與輸出電 流一對一映射。換言之,進入平衡點後,假設(10)造成的擾動相較於穩態時平衡 點的值可以被忽略[20],從平均值的觀念來看,以該平衡點上對應的責任週期控 制開關元件的狀態,系統將穩定在操作點上,亦即交流模型的平均值是為零。. dB dA x1A. x1B. x25V 圖 2.1.6 不同責任週期與負載條件下,灰色區域為平衡點之集合 由方程式(9)繪製不同責任週期與負載的關係圖,如圖 2.1.6 所示。考慮負載 變化在平衡點之間的輸出狀態變化情形,啟動後系統到達穩態平衡點 A,負載增 ‐ 13 ‐ .
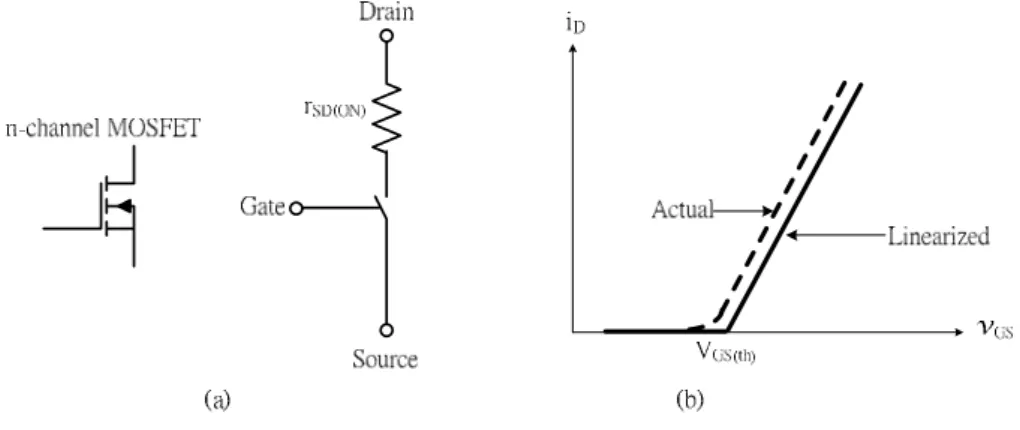
(25) 加後,系統穩態平衡點移動到下一個平衡點 B,固定輸出電壓的條件下(例如在這 個例子中,輸出電壓固定在 x25V ), x1B > x1A 且 d B > d A 。. 2.2 考慮非理想 Buck DC-DC Converter 之狀態方程式 2.2.1 片段線性模型 所謂非理想之等效電路,就是考慮實際開關元件在導通時存在功率消耗,亦 稱之為片段線性等效電路,而被動元件則是與元件本身特性有關,考慮其非理想 的功率消耗。在 Buck DC-DC Converter 中,主要電子元件之非理想特性簡述如下 [21]: (a) MOS-FET:等效電路可視為一電壓控制開關,其狀態由閘-源極電壓控 制。當開關截止時(vGS < VGS(th)),阻抗無限大,以一單軸單輸出開關(SPST) 開路表示之。當開關導通時(vGS > VGS(th)),片段線性模型在源極(source) 與汲極(drain)間視為一等效電阻,以 rds(on)表示之。N-通道 MOS-FET 之等效 電路如圖 2.2.1(a)所示,轉移曲線如圖 2.2.1(b)所示。. 圖 2.2.1 N 通道 MOS-FET 片段線性模型 (b) Diode:如圖 2.2.2 所示,為二極體片段線性模型,考慮切入電壓 VDO,導 ‐ 14 ‐ .
(26) 通後電流-電壓曲線之斜率的倒數以一等效電阻 rD 取代,如圖 2.2.2(b)所 示。圖 2.2.2(a)之等效電路包含一理想二極體,其目的在限制順偏時的電 流方向。. Slope =. 1 rD. 圖 2.2.2 二極體片段線性模型 (c) 電感:等效電路除了理想電感外,考慮繞線長短所造成的銅損,繞線長度 越長以及線徑越小,其等效串聯電阻(ESR,equivalent series resistance)值 也越大,換言之,系統的效率越差。 (d) 電容:實際的電容等效電路包含等效串聯電感(ESL)與等效串聯電阻 (ESR),前者可利用電路布局降低其非理想特性,後者則與電容本身材質 與外觀設計有關。實務上輸出電壓的鏈波必須小於輸出電壓的 1%,其中 90~95%的鏈波來自於等效串聯電阻的非理想效應[22],故設計上多採用具 有較低等效串連阻抗的電容,例如表貼多層陶瓷電容(MLCC),或採用多 電容並聯以降低此一非理想效應。 若將片段線性模型取代圖一之被動元件,則成為非理想之電源轉換器等效電 路,如圖 2.2.3 所示。. ‐ 15 ‐ .
(27) 圖 2.2.3 以非理想模型取代之 Buck DC-DC Converter 2.2.2 利用狀態空間法建立 Buck DC-DC Converter 之模型 依據前述建立切換式電源轉換器之步驟,推導圖八之動態方程式。令流經電 感器之電流 iL ( t ) 與電容器不考慮等效串聯電阻之端電壓 vC ( t ) 為狀態變數,即. ⎧⎪ x1 = iL ( t ) ⎨ ⎪⎩ x2 = vC ( t ). ⎧ diL ( t ) ⎪ x1 = ⎪ dt ⇒⎨ 以及輸出變數 y = vO ( t ) 。 dv t ( ) ⎪x = C ⎪⎩ 2 dt. 步驟一: 依開關狀態建立電路的狀態方程式 當圖 2.2.3 之 SPDT 開關切到位置 1,其等效電路與電流方向如圖 2.2.4 所示。 依據克西赫夫電壓定律(KVL,Kirchhoff’s voltage law)可知: ∵ vO ( t ) = vC ( t ) + iC ( t ) rC = vC ( t ) + CrC. dvC ( t ). dt and E − iL ( t )( rds + rL ) − vL ( t ) − vO ( t ) = 0. ∴ Lx1 + rC Cx2 = − ( rds + rL ) x1 − x2 + E. (13). 根據電流定律(KCL,Kirchhoff’s current law)可知, ∵. vO ( t ) RL. + iC ( t ) = iL ( t ) ⇒ v ( t ) + C ( R + r ) C L C. ∴ C ( rC + RL ) x2 = RL x1 − x2. dt. = iL ( t ) RL. (14) ‐ 16 ‐ . . d ( vC ( t ) ).
(28) 圖 2.2.4 開關置於 1 之等效電路與電流方向 結合(13)式與(14)式可得此開關狀態下之狀態方程式為. ⎡ − ( rds + rL ) − rC + ⎢ L ⎛ r ⎞ ⎢ L ⎜1 + C ⎟ ⎡ x1 ⎤ ⎢ ⎝ RL ⎠ ⎢x ⎥ = ⎢ 1 ⎣ 2⎦ ⎢ ⎢ ⎛ r ⎞ ⎢ C ⎜1 + C ⎟ ⎝ RL ⎠ ⎣⎢. ⎡ rR y=⎢ c L ⎣ rc − RL. ⎤ −1 ⎥ ⎛ rC ⎞ ⎥ L ⎜1 + ⎟ ⎡E⎤ ⎝ RL ⎠ ⎥ ⎡ x1 ⎤ + ⎢ ⎥ = A x + b L ⎥⎢ ⎥ 1 1 −1 ⎥ ⎣ x2 ⎦ ⎢ 0 ⎥ ⎣ ⎦ ⎛ rC ⎞ ⎥ CRL ⎜ 1 + ⎟⎥ ⎝ RL ⎠ ⎦⎥. − RL ⎤ ⎥ x = c1 x rc − RL ⎦. (15). (16). 同理,當圖 2.2.3 之 SPDT 開關切到位置 0,其等效電路與電流方向如圖 2.2.5 所示。. 圖 2.2.5 開關置於 0 之等效電路與電流方向 根據 KVL 與 KCL 可知:. ‐ 17 ‐ .
(29) ∵VD − iL ( t )( rd + rL ) − vL ( t ) − vO ( t ) = 0 ⇒ −VD − x1 ( rd + rL ) − x2 − CrC x2 = 0 ∴ Lx1 + CrC x2 = − x1 ( rd + rL ) − x2 − VD. ∵. vO ( t ) RL. + iC ( t ) = iL ( t ) ⇒ v ( t ) + C ( R + r ) C L C. (17) d ( vC ( t ) ) dt. ∴ C ( rC + RL ) x2 = RL x1 − x2. = iL ( t ) RL. (18). 結合(17)式與(18)式可得此開關狀態下之動態方程式為. ⎡ − ( rd + rL ) − rC + ⎢ L ⎛ r ⎞ ⎢ L ⎜1 + C ⎟ ⎡ x1 ⎤ ⎢ ⎝ RL ⎠ ⎢x ⎥ = ⎢ 1 ⎣ 2⎦ ⎢ ⎢ ⎛ r ⎞ ⎢ C ⎜1 + C ⎟ ⎢⎣ ⎝ RL ⎠. ⎡ rR y=⎢ c L ⎣ rc − RL. ⎤ −1 ⎥ ⎛ r ⎞ L ⎜1 + C ⎟ ⎥ ⎡ −VD ⎤ ⎝ RL ⎠ ⎥ ⎡ x1 ⎤ + ⎢ L ⎥ = A2 x + b2 (19) ⎥⎢ ⎥ ⎢ ⎥ x −1 ⎥⎣ 2⎦ 0 ⎦ ⎣ ⎛ r ⎞⎥ CRL ⎜ 1 + C ⎟ ⎥ ⎝ RL ⎠ ⎥⎦. − RL ⎤ ⎥ x = c2 x rc − RL ⎦. (20). 步驟二: 利用責任週期取狀態變數之平均 令 v = [ 0,1] 為控制開關元件導通與截止狀態之責任週期,利用(6)式平均(15) 式與(19)式可得 x = ( A1 × v +A2 × (1 − v ) ) x + ( b1 × v +b2 × (1 − v ) ). (21). 步驟三: 分離狀態方程式為直流與交流兩部分 整理(21)式並將前述 x = x + x 與 v = v + v 代入可得直流模型與交流模型:. DC Model: ‐ 18 ‐ .
(30) ( A v + A (1 − v ) ) x + ( b v + b (1 − v ) ) = 0 1. 2. 1. 2. (22). AC Model:. x = ( A1v + A2 (1 − v ) ) x + ⎡⎣( A1 − A2 ) x + (b1 − b2 ) ⎤⎦ v + ( A1 − A2 ) xv. (23). 穩態輸出電壓與擾動分別為: Vo = cx =c ( A1V + A2 (1 − V ) ) b. (24). Vo = cx. (25). −1. 圖 2.2.6 為固定系統參數下方程式(22)與(24)系統穩態之數值模擬結果,直線 段構成的集合代表不同的責任週期與負載得到平衡點,而平面的位置代表固定輸 出 5V,A 點與 B 點平面上兩平衡點,分別表示固定輸出電壓下不同負載(輸出電 流)與責任週期。. 圖 2.2.6 固定系統參數,方程式(21)之數值模擬結果 ‐ 19 ‐ .
(31) 2.3 模型分析 2.3.1 穩定性與控制性 上述 Buck DC-DC converter 在固定時間內被切換為兩個子系統,分別為:. ⎧ x = A1 x + b1 ⎨ ⎩ x = A2 x + b2. Subsystem 1: 當開關S為導通狀態 Subsystem 2: 當開關S為截止狀態. (26). 假設兩輸入矩陣 b1 與 b2 分別代表兩子系統之輸入,系統矩陣 A1 與 A2 分 別為 1 ⎡ a1 a12 ⎤ ⎡ a112 a122 ⎤ = A1 = ⎢ 11 A ⎢ 2 2 1 1 ⎥ 2 ⎥ ⎣ a21 a22 ⎦ ⎣ a21 a22 ⎦. 則此子系統可視為兩線性非時變系統(Linear Time Invariant system,LTI system), 滿足系統穩定的條件其系統極點必須位在 S-domain 的左半平面[23],分別為: 1 Pole of Subsystem 1: Re ( det ( λ I − A1 ) ) < 0 ⇒ a11 + a122 < 0 2 Pole of Subsystem 2: Re ( det ( λ I − A2 ) ) < 0 ⇒ a112 + a22 <0. (27) (28). 由(15)與(19)式可知,元件參數大於零,所以兩子系統滿足有限輸入有限輸出. (Bounded-input Bounded-output,BIBO)之穩定條件。 在討論 Buck DC-DC Converter 的控制器設計中,如果僅考慮理想 Buck. DC-DC Converter 的狀態平均模型,則在兩個子系統的狀態方程式之間存在 A1 = A2 使得狀態空間平均模型(21)式結果為線性模型。然而,若考慮非理想 Buck DC-DC converter,則 A1 ≠ A2 ,使得狀態空間平均模型為 ‐ 20 ‐ .
(32) ⎡ − ( rd + rL ) − rC + ⎢ L ⎛ r ⎞ ⎢ L ⎜1 + C ⎟ ⎢ ⎝ RL ⎠ x=⎢ 1 ⎢ ⎢ ⎛ r ⎞ C ⎜1 + C ⎟ ⎢ ⎢⎣ ⎝ RL ⎠. ⎤ ⎥ ⎛ r ⎞ L ⎜1 + C ⎟ ⎥ ⎡ − ( rds − rd ) ⎡ E + VD ⎤ ⎝ RL ⎠ ⎥ x + ⎢ ⎢ ⎥ v+ L ⎥ L ⎢ ⎢ ⎥ −1 ⎥ 0 0 ⎣ ⎦ ⎣⎢ ⎛ rC ⎞ ⎥ CRL ⎜ 1 + ⎟⎥ ⎝ RL ⎠ ⎥⎦ −1. ⎤ ⎡ −VD ⎤ 0⎥ xv + ⎢ L ⎥ ⎥ ⎢ ⎥ 0 ⎦⎥ ⎣ 0 ⎦. ⇒ x = Ax + bv + Nxv + d m. (29). 由上式(29)可知系統為單輸入之雙線性系統(Bilinear System),針對此一雙狀 態變數單輸入之雙線性系統,其可控性之必要條件為[24]:. (C1) 矩陣 A 具有相異實根,且與 N 沒有相同的特徵向量(Eigenvector) (C2) 定義下列集合: W A = { x:Ax =0} W1 = { x:Nx =-b}. 若此雙線性系統滿足可控性其必要條件為 W A ∩ W1 =∅. (C3). (. ). rank ⎡⎣( Nxeq + b ) , ( A + Nveq )( Nxeq + b ) , N ( Nxeq + b ) ⎤⎦ = 2. 其中,在每一個平衡點. xeq. 具有對應之等效控制(equilibrium control). (30) veq. 。. 由(29)式可知, A 矩陣中元件參數不為零,則矩陣 A 具有相異實根,且與 N 沒有 相同的特徵向量,滿足條件(C1)。狀態方程式之解集合包含原點,且(29)式代入條 件(C2)滿足 W A ∩ W1 =∅ 。狀態方程式代入條件(C3)滿足方程式(30),故此單輸入 雙狀態變數之雙線性系統是可控的。. ‐ 21 ‐ .
(33) 2.3.2 不確定量分析 由前述分析可知,非理想之 Buck DC-DC converter 的狀態方程式為單輸入雙 狀態變數之雙線性系統,該系統是穩定且可控。以下分析則是針對系統不確定量 對系統影響。 由狀態方程式可知,系統矩陣 A 與負載有關,在設計上會採用低等效串聯阻 抗之電容,故假設 rC u =v+. RL ,且令. VD E + VD. 則狀態方程式(28)式可化簡為. x = Ax + bu + Nxu. (31). 其中. ⎡ − ( rd + rL + rc ) − ( rds − rd ) V + × d ⎢ L L E + Vd A=⎢ ⎢ 1 ⎢ C ⎣. −1 ⎤ ⎥ L ⎥ −1 ⎥ ⎥ CRL ⎦. ⎡ ( E + Vd ) ⎤ ⎡ − ( rds − rd ) ⎤ 0⎥ ⎢ ⎥ ⎢ b= ,以及 N = L ⎢ L ⎥ ⎢ ⎥ 0 0⎥⎦ 0 ⎢⎣ ⎥⎦ ⎢⎣ 上述方程式可知,負載與矩陣 A 有關,換言之,當負載改變時,將影響系統 極點,依據(27)與(28)式可知,此改變不影響系統的穩定性。令負載為 RL = RLo + RL 其中 RLo 為設計時預設負載(default value of the load), RL 為負載的不確定量。代入 矩陣 A ,可得 ‐ 22 ‐ .
(34) ⎡ − ( rd + rL + rc ) − ( rds − rd ) Vd + × ⎢ L L E + Vd A = Ao + ∆A = ⎢ ⎢ 1 ⎢ C ⎣. −1 ⎤ ⎥ ⎡0 L ⎥ ⎢ + −1 ⎥ ⎢0 ⎥ ⎢ CRLo ⎦ ⎣. ⎤ ⎥ RLo − RL ⎥ CRLo RL ⎥⎦ 0. (32). 上式代入(30)式,系統狀態方程式可以整理為. x = Ax + bµ + Nx µ + d ⎡ − ( rd + rL + rc ) − ( rds − rd ) Vd + × ⎢ L L E + Vd =⎢ ⎢ 1 ⎢ C ⎣. −1 ⎤ 0 ⎡ ⎤ ⎥ L ⎥ (33) ⎢ x + bu + Nxu + ⎢ RLo − RL ⎥⎥ x −1 ⎥ ⎢⎣ CRLo RL 2 ⎥⎦ o ⎥ CRL ⎦. 由(33)式可知,負載的不確定量與系統狀態有關,為非匹配不確定量(mismatched. uncertainty),且預設負載值(Default value of the load)與系統極點有關。在設計實務 上,可以從電子產品的系統架構評估各電源所需之電源功率,所以負載的變動範 圍可以利用此評估步驟決定(33)式中 RL 之最大值與最小值,另一方面,狀態變數. x2 是有界的(bounded),所以此一非匹配不確定量是有界的。 下一章將以(33)式所示之狀態方程式設計控制器,控制目標為在有界輸入. (bounded input, [0,1])將系統輸出電壓控制到期望值(desired voltage level)且不受負 載變化影響其閉迴路系統之穩定性。. ‐ 23 ‐ .
(35) 第三章 Buck DC-DC Converter 之順滑控制器設計 在第二章中對整個 Buck 直流轉換電路的數學模型有完整的建構,如方程式. (33)式所示,在本章中將討論順滑控制器之設計。第一節討論順滑控制基本理論 與設計步驟。第二節設計應用於 Buck 直流轉換器之誤差積分型順滑控制。. 下一章將依本章之控制器利用 MATLAB/Simulink 做數值模擬,以及. MATLAB/Simulink 中的 SimPowerSystems 模擬控制器在考慮接近電路物理特性下 之模擬。. 3.1 順滑模態控制理論介紹 可變結構系統(Variable Structure System, VSS) 是一種結構可以改變的系統, 包含兩個以上的子結構與切換條件(switching condition),使得系統在符合條件下 呈現相對應的子結構。換言之,可變結構控制是先使受控系統產生兩個以上的子 結構,再利用刻意加入的切換條件達成控制目的的一種技術[25]。 根據文獻上的記錄,在 1950 年代,前蘇聯就已經有學者與工程師將可變結 構系統應用在馬達控制上,並發現了一個重要的系統行為:順滑模態(sliding. mode),實際的高頻切換控制法則,使得系統的軌跡被控制到狀態空間中一個非 線性與設計者選定的平面上,並使系統軌跡維持在此平面上,稱之為切換平面. (switching surface)或順滑面(sliding surface)。被稱為切換平面是因為,當系統軌跡” 低於”此一平面,在控制路徑上會得到強迫系統”上升”回到平面的增益,反之,若 系統軌跡”高於”此一平面,控制路徑產生的增益強迫系統”下降”回到平面。簡而 言之,順滑模態控制是,先使受控系統產生兩個以上的子結構,再利用刻意加入 ‐ 24 ‐ .
(36) 的切換條件使系統穩定在切換平面上的一種技術[25]。 3.1.1 順滑模態控制原理 對一個單輸入系統 x = f ( x , u ) 而言,通常切換條件 u ( x ) 表示為: ⎧⎪u + ( x ) u ( x) = ⎨ − ⎪⎩u ( x ). s( x) > 0 s( x) < 0. (34). 其中, s ( x ) 為一切換函數(switching function),對時間是一次可微的且 u + ( x ) ≠ u − ( x ) ,切換函數與切換條件之關係如圖 3.1.1 所示。 u ( x) u+ ( x ). s ( x) u− ( x ). 圖 3.1.1 切換函數與切換條件之關係圖 由圖 3.1.1 可知,切換函數將整個狀態空間分成三個子空間: s ( x ) > 0 , s ( x ) < 0 ,與 s ( x ) = 0 。其中順滑平面(sliding surface) s ( x ) = 0 必須是連續且包含. 平衡點 x = 0 ,控制器的設計目標即是在順滑平面 s ( x ) = 0 中產生順滑模態,所以 通常稱 s ( x ) 為順滑函數(sliding function)。 順滑模態的產生,首先是要確保軌跡能在有限的時間內接觸到順滑平面,此 ‐ 25 ‐ .
(37) 過程稱為迫近模態(reaching mode) ,而當系統進入順滑平面後,必須確保軌跡朝 著平衡點逼近,在這個順滑平面中的系統行為即為順滑模態(sliding mode),如圖. 3.1.2 所示,概略描繪出順滑模態控制的兩個模態,當 t = 0 時,系統初始狀態即被 控制向順滑平面前進,並在有限的時間內到達,然後在往後的時間內,系統將不 再脫離此順滑平面,且朝著平衡點移動,最終到達原點。 x ( 0). x (∞) = 0. s( x) = 0. 圖 3.1.2 迫近模態與順滑模態 保證系統軌跡進入順滑平面的條件,稱之為迫近條件(reaching condition),說 明如下: s( x) > 0 s( x) < 0 s( x) = 0 s( x) < 0 s( x) > 0. 圖 3.1.3 迫近條件式意圖 如圖 3.1.3 所示,在順滑平面附近當 s ( x ) > 0 時,順滑函數隨時間增加而遞減 s ( x ) < 0 ;反之,當 s ( x ) < 0 時,順滑函數隨時間增加而增加 s ( x ) > 0 ,亦即若選. 定之順滑函數 s ( x ) 滿足. ‐ 26 ‐ .
(38) lim s ( x ) s ( x ) < 0. (35). s →0. 不等式(35)稱之為順滑條件(Reaching and Sliding Condition)[26]代表順滑函數若滿 足此一條件,則系統軌跡在順滑平面附近將保證迫近順滑平面。任一系統的順滑 函數非唯一,但不論選擇何種型態的順滑函數,都必須滿足(35)式之條件方可確 定系統可以迫近順滑平面,然而此一條件並無法說明系統之行為能夠在有限時間 內迫近順滑平面。以下介紹一個最常使用的迫近條件[25]: s ( x ) s ( x ) < −ρ s ( x ). 當. s( x) ≠ 0. (36). 其中 ρ > 0 。選擇一個函數:. V=. 1 2 s ( x) 2. (37). 因為 s ( x ) 對時間是一次可微的,所以當迫近條件(36)式成立時, V = s ( x ) s ( x ) < − ρ s ( x ) = − ρ 2V < 0. (38). 由(38)式可知,V 是一個 Lyapunov 函數,呈現遞減收斂的趨勢。整理(38)式可得: V (t ). ∫. V (0). 1 dV < −2 ρ t 2V. (39). 上式整理後,可得: 0≤. 1 V (0) V (t ) V (0) < − 2ρt ⇒ t < 2 2 2ρ 2. (40). 因為 t 小於一個有限大小的值,代表系統軌跡將在有限時間內進入順滑平面且保 證順滑模態產生。 當系統軌跡進入順滑平面,將以順滑模態接近平衡點,需要無限大的切換頻 ‐ 27 ‐ .
(39) 率,然而在實際的系統因為延遲或磁滯並無法實現,但仍在順滑平面上以較高的 頻率切換並朝向平衡點前進,這樣的切換現象(震盪現象)稱之為跳切(chattering)。 上述過程知道,系統的迫近模態是屬於連續性軌跡接近順滑平面,然而進入 順滑平面後,系統軌跡以不連續的切換條件連續的接近平衡點,換言之,如何證 明跳切現象會朝向平衡點前進?一個最早與直接的近似概念,Filippov 法(the. method of Filippov)引入的等效控制概念(the method of equivalent control)可獲得合 理的解釋。 考慮下列單輸入線性系統之狀態方程式:. x = f ( x, u ). (41). 當系統軌跡進入順滑平面,延遲 td 的時間才能切換輸入控制,假設第一次接觸到 順滑平面時的時間為原點(t0=0),系統軌跡如圖 3.1.4 所示。令控制輸入為 ⎧u + u=⎨ − ⎩u. for s>0 for s<0. + t + t < t < td + tn+1 , td > 0 , u + ≠ u − , n∈R , d n. (42). 圖 3.1.4 當系統軌跡進入順滑平面,延遲 td 的時間才能切換輸入控制 順滑函數的一次微分如下:. ‐ 28 ‐ .
(40) s=. ds ∂s dx = ⋅ = grad ( s ) ⋅ x = grad ( S ) ⋅ f ( x , u ) dt ∂x dt. (43). 從圖十五可知,假設 t0=0 到 t2, ∆s 的變化量為 ∆s = grad ( s ) ⋅ ⎡⎣ f ( x , u + ) ( t1 ) + f ( x , u − ) ( t2 − t1 ) ⎤⎦ = 0. (44). 利用(41)式的微量表示式整理後可得 ∵. ∆x = f ( x, u ) ∆t. ∴ ∆x = f ( x , u ) ⋅ ∆t. (45). 由 P-Q-R-T 的曲線路徑可得. ( ) ( ) = f ( x, u ) ( t ) + f ( x, u ) ( t. (. ). ∆x = f x, u − ( td ) + f x, u + ( t1 + td − td ) + f x, u − ( t2 − t1 − td ) +. −. 1. 2. − t1 ). (46). 由 P-T 的直線路徑可得 ∆x = f ( x , ueq ) ∆t. (47). 整理(46)與(47)式後可得. f ( x, ueq ) = 令µ =. ∆x 1 ⎡ = f x, u + ( t1 ) + f x, u − ( t2 − t1 ) ⎤⎦ ∆t t2 ⎣. (. ). (. ). (48). t −t t1 , 1 − µ = 2 1 帶入上式可得等效控制 t2 t2. (. ). (. f ( x , ueq ) = µ f x , u + + (1 − µ ) f x , u −. ). (49). 換言之,順滑模態下的系統可以表式為. x = f ( x, ueq ). (50). 由於等效控制 ueq 為連續,所以順滑模態也是連續。在圖十五中,為求得 s ( x ) = 0 ‐ 29 ‐ .
(41) 會令 ε → 0 使得系統軌跡一旦接觸了順滑平面就被限制在此平面上並朝向平衡點 前進,然而缺點是系統將呈現嚴重跳切現象。為改善此一缺點造成控制器無法實 現,以一個飽和函數(saturation function)來改善(34)式造成的跳切現象。此一函數 可視為在圖 3.1.4 中選取一個邊界層,當系統軌跡進入順滑平面,延遲 td 的時間才 能切換輸入控制,如圖 3.1.5 所示。. sat ( s ). 1. −ε. ε. s ( x). −1. 圖 3.1.5 飽和函數改善(34)式造成的高頻跳切現象. ⎧ 1 when sat ( s ) > ε ⎪ ⎪s when sat ( s ) ≤ ε sat ( s ) = ⎨ ⎪ε ⎪⎩ −1 when sat ( s ) < ε. (51). 在還沒進入到邊界層時,亦即當 s > ε ,可以得知 sat ( s ) = sgn ( s ) ,換言之在 系統軌跡尚未進入邊界層之前,系統滿足(38)式之迫近條件,軌跡將在有限時間 內進入邊界層。一旦進入邊界層,系統切換條件由(51)式決定,軌跡將在順滑層 內遊走,然而並不保證系統軌跡不會離開此一邊界層,因為順滑函數與系統狀態 有關,一旦系統軌跡脫離此一邊界層,切換條件回到(38)式,在有限時間內再次 回到邊界層。選取(51)式的飽和函數可以獲得降低高頻跳切現象的優點,然而付. ‐ 30 ‐ .
(42) 出的代價是系統的精確度,系統軌跡將不再往原點逼近且真的進入原點,而是在 原點周圍遊走,範圍由飽和層的厚度決定。再者,由於飽和層的厚度 ε 是有限值, 因此不影響系統的穩定性。 從上述的推導過程可知,系統軌跡將由起始點朝向順滑平面前進,一旦進入 順滑平面軌跡將延著順滑平面前進,因此順滑控制系統具備下列兩種系統型為:. (1) 迫近模態:迫使系統軌跡在有限時間內接觸到順滑平面或包含順滑平面 之飽和層。. (2) 順滑模態:將系統軌跡限制在順滑平面或包含順滑平面之飽和層,且最 後逼近平衡點。 根據此特性,在設計順滑模態控制器通常會依據下列兩個設計步驟:. (步驟一)選擇順滑函數 s ( x ) 使得系統軌跡穩定在順滑平面 s ( x ) = 0 上。 (步驟二)決定控制法則使得系統在有限時間內迫近順滑平面。 以下將以一有限單輸入雙線性系統為例,介紹順滑模態控制器之設計步驟。 3.1.2 順滑函數之選擇-以單輸入雙線性系統為例 考慮下列單輸入雙線性系統(bilinear system)之狀態方程式(state equation): x = A x + bu + N xu. (52). 其中 x ∈ Rn×1,A ∈ R n× n,b ∈ Rn×1,N ∈ R n× n,以及 u ∈ [ 0,1] 是一維變數(scalar input)。 根據上節介紹的設計步驟,此非線性系統之順滑模態控制器設計如下: (步驟一)選擇順滑函數 s ( x ) 使得系統在順滑平面軌跡是穩定的。 根據第二章所列出之可控性必要條件(C1),(C2),與(C3),假設系統(52)滿足 ‐ 31 ‐ .
(43) 此必要條件,系統是可控的,令 c ∈ R1×n 為一行向量(row vector)使得順滑函數為 s ( x ) = cx. (53). 上式對時間微分可得 s ( x ) = cx = cAx + ( cb + cNx ) u. (54). 假設 Cb + CNx ≠ 0 ,則在順滑平面 s ( x ) = 0 存在等效控制 u eq 使得 s( x). u =ueq. =0. (55). 其中,等效控制 u eq 為 ueq = − ( cb + cNx ) cAx −1. (56). 將上式(56)代入(52)式,可得順滑平面上系統之動態方程式為 x = Ax − ( cb + cNx ). −1. ( b + Nx ) cAx = Aeq ( x, c ) x. (57). 由於 rank ( c ) = 1 且 cAeq ( x , c ) = 0 ,所以 Aeq ( x , c ) 至少有一根為零,所以設計時選 取適當的順滑函數使得 Aeq ( x , c ) 之根集合為. {λ1 , λ2 ,. , λn −1 , 0}. (58). 令 Re {λi i = 1 ~ n − 1} < 0 使得順滑平面上系統之軌跡式穩定的,亦即 Aeq ( x , c ) 是穩 定的。 (步驟二)設計控制法則,使得系統在有限時間內到達順滑平面。 在步驟一假設在順滑平面存在等效控制 u eq 使得(55)式成立,此時令控制器之 ‐ 32 ‐ .
(44) 控制法則為. u = − ( cb + cNx ). −1. ( cAx + ρ sgn ( s ) ). (59). 其中 ρ 為大於零之任意數。將(59)式與(54)式代入(36)式,可得 ss = s ( ρ sat ( s ) ) ≤ − ρ s < 0 when s ≥ ε ss = − ρ. s2. ε. (60). < 0 when s < ε. 故滿足迫近與順滑條件(Reaching and Sliding Condition),系統軌跡在有限時間內 接觸到順滑層,當系統軌跡進入順滑層後,持續朝向順滑平面逼近。所以前述假 設 Cb + CNx ≠ 0 成立,則選取此一控制法則,系統將實現順滑模態控制,也因此 在系統狀態空間存在區間使得此一假設成立,稱之為迫近與順滑區間(Reaching. and Sliding Region, RAS-Region),以二維相位平面(phase plane, 假設 n=2)為例並 假設 Cb + CNx > 0 ,其迫近與順滑區間如圖 3.1.6 所示。. X1 =. − ( C1b1 + C2b2 ) ( C1n11 + C2 n21 ). X2 =. − ( C1b1 + C2b2 ). ( C1n12 + C2 n22 ). 圖 3.1.6 灰色區間為迫近與順滑區間. ‐ 33 ‐ .
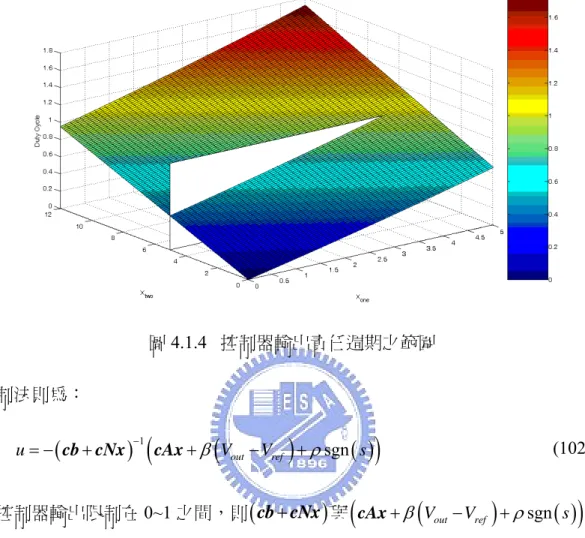
(45) 3.2 設計降壓型直流轉換器(Buck DC-DC Converter)之順滑模態控制 在第二章中,我們推導出 Buck 直流轉換器之模型,因為考慮開關元件之非 理想模型,故推導出之模型為雙線性型式(Bilinear Form),且因為負載的變化,所 以非匹配式不確定量與系統狀態有關,如方程式(61)所示。. x = Ax + bu + Nxu + d. (61). ⎡ − ( rd + rL + rc ) − ( rds − rd ) Vd + × ⎢ L L E + Vd 其中 A = ⎢ ⎢ 1 ⎢ C ⎣. 0 ⎡ ⎤ ⎡ − ( rds − rd ) ⎢ ⎥ o d = ⎢ RL − RL ⎥ 以及 N = ⎢ L ⎢ x2 o ⎢⎣ CRL RL ⎥⎦ 0 ⎢⎣. −1 ⎤ ⎡ ( E + Vd ) ⎤ ⎥ L ⎥ ,b = ⎢ L ⎥, ⎢ ⎥ ⎥ −1 0 ⎢ ⎥ ⎣ ⎦⎥ CRLo ⎦. ⎤ 0⎥ ⎥ 0 ⎥⎦. 在第二章中說明系統因為開關切換而分成兩個穩定的子系統,不會因為負載變化 而發散。由狀態方程式可驗證系統是可控,所以可以利用極點指定法(pole-. placement method)得到唯一的增益向量 k ∈ R2 使得矩陣 A − bk 有 2 個指定的特徵 值。此系統之雙線性項(bilinear term)是匹配於系統輸入矩陣 b ,且遠小於系統矩 陣A。 以下設計步驟分為三部分,首先依據上述之步驟一選定順滑函數,使得系統 軌跡在順滑平面上是穩定的。接著說明輸出電壓與命令電壓之誤差積分項在此順 滑函數中的影響。最後討論此包含誤差積分之順滑函數之迫近特性,即前述步驟 二。在過去的設計中,取誤差函數為狀態變數,其缺點是控制器必須確實掌握負 載為何,故加入其他的估測與控制法則。我們的設計目標是,在負載不確定下仍 ‐ 34 ‐ .
(46) 能正確控制系統輸出,且不因負載變化影響控制器之穩定性。 3.2.1 步驟一:選擇順滑函數使得系統在順滑平面軌跡是穩定的 已知 b 是全秩矩陣(full rank),且系統(61)式可控的,依據矩陣理論可以知道 一定會找到一個非奇異(nonsingular)轉換矩陣(Transformation Matrix)使得. ⎡0⎤ Tb = ⎢ ⎥ ⎣1 ⎦. (62). 利用此轉換矩陣定義新的系統狀態 y 如下:. ⎡z⎤ y = Tx = ⎢ ⎥ ⎣v ⎦. (63). 其中 z = y1 ,以及 v = y2 。 則原系統(61)成上轉換矩陣 T 後成為. y = TAT −1 y + Tbu + TNT −1 yu + Td. (64). 因為雙線性項(Bilinear term)對系統輸入矩陣 b 而言是匹配的,所以該項可以表式 為 Nx = bf ( x ). (65). 再由(62)式與(65)代入上式(64)繼續化為 ⎡ z ⎤ ⎡ H11 ⎢v ⎥ = ⎢ H ⎣ ⎦ ⎣ 21. H12 ⎤ ⎡ z ⎤ ⎡ 0 ⎤ ⎡t d ⎤ ⎡0⎤ + ⎢ ⎥ u + ⎢ ⎥ f ( x)u + ⎢ 1 ⎥ ⎥ ⎢ ⎥ H 22 ⎦ ⎣ v ⎦ ⎣ 1 ⎦ ⎣1 ⎦ ⎣ t2d ⎦. ‐ 35 ‐ . (66).
(47) ⎡H 其中 TAT −1 = ⎢ 11 ⎣ H 21. H12 ⎤ ⎡t ⎤ ,以及 T = ⎢ 1 ⎥ ⎥ H 22 ⎦ ⎣t2 ⎦. 由(66)式可知,當系統經過矩陣轉換後,新的狀態方程式將分為兩部分,其一與 原系統之輸入無關且僅受非匹配式雜訊 t1d 干擾;另一與原系統之輸入以及匹配 式雙線性項有關。如下列兩方程式所示:. z =H11 z +H12v + t1d. (67). v = H 21 z + H 22 v + u + f ( x ) u + t 2 d. (68). 當系統被控制在順滑平面上,(68)式的輸入以等效控制取代,與系統的穩定性無 關且順滑行為(sliding behavior)被限制在方程式(67)式,為了保證系統在順滑平面 上的穩定性,(67)是必須是穩定的。在使用根值指定法設計(67)式之前,必須確認 此狀態方程式是可控的。已知原系統滿足雙線性系統可控之必要條件,若在該條 件之第三項中,(即第二章的(C3)),忽略雙線性矩陣(bilinear term),則可控性矩陣 可簡化為線性系統之可控性矩陣(controllability matrix): rank ([ b, Ab ]) = 2. (69). (69)式乘上轉換矩陣 T : ⎛ ⎡ ⎡0⎤ ⎡ H ⎤ ⎤ ⎞ ⎛ ⎡ ⎡0⎤ ⎡0⎤ ⎤ ⎞ rank ⎣⎡Tb, TAT −1Tb ⎦⎤ = rank ⎜ ⎢ ⎢ ⎥ , H ⎢ ⎥ ⎥ ⎟ = rank ⎜ ⎢ ⎢ ⎥ , ⎢ 12 ⎥ ⎥ ⎟ = 2 ⎜ ⎣1 ⎦ ⎜ ⎣ 1 ⎦ ⎣ H 22 ⎦ ⎟ ⎣1 ⎦ ⎦ ⎟⎠ ⎦⎠ ⎝⎣ ⎝⎣. (. ). (70). 則(67)式之可控性矩陣為 [ H12 , H 22 H12 ] ,因為 H12 ≠ 0 ,所以 rank ([ H12 , H 22 H12 ]) = 1. (71). (67)式是可控的,可以利用根值指定法設計(67)式。令系統狀態為 z ,輸入為 v , ‐ 36 ‐ .
(48) 選擇 v = −Γ z. (72). z = ( H11 − ΓH12 ) z +t1d. (73). 使得. 其中 ( H11 − ΓH12 ) 必須是穩定的。選擇順滑函數為 s = v + Γz. (74). 在順滑平面 s = 0 時, v = −Γ z 使得(67)式是穩定的。由於(63),可將上式改寫為 s = [ Γ 1] Tx = cx. (75). 所以順滑函數之係數 c 為 c = [ Γ 1] T. (76). 上述的過程中,我們利用轉換矩陣 T 將原系統狀態方程式將原系統狀態方程式分 為兩部分,其一是與系統輸入無關的(67)式,另一是與系統輸入有關的(68)式。利 用根值指定法使(67)式穩定,指定 ( H11 − ΓH12 ) 的特徵值後解得 Γ ,得到順滑函數. (75)式。 在順滑平面 s = 0 存在等效控制 ueq 使得 s. (. =0:. s = v + Γz = H 21 z + H 22 v + (1 + f ( x ) ) ueq + t 2 d + Γ ( H11 z +H12 v + t1d ) = 0. ). (77). ⇒ ueq = (1 + f ( x ) ). z + H 22 v + t 2 d ) − Γ ( H11 z +H12 v + t1d ) ). (78). −1. (− ( H. 21. 因此,在順滑平面上系統成為. ‐ 37 ‐ . u = ueq.
(49) z = ( H11 − ΓH12 ) z +t1d. (79). s=0. (80). 其中(80)式與系統的穩定性無關。 3.2.2 誤差積分項在順滑函數中的影響 上述順滑模態控制器的控制目標是把系統軌跡控制到原點,然而在直流轉換 電路中,如果系統是鬆弛的(relaxed system),意味著系統初始值為零,若選取上 述順滑函數,則系統軌跡在系統起始點就位在順滑平面上,並不能把系統軌跡帶 到期望狀態(desired state),所以先前的研究採用誤差函數為新的狀態變數,利用 順滑模態控制將誤差函數控制到原點,然而此控制方法的缺點必須知道系統負 載,且系統負載變動時,便無法將系統軌跡維持在期望狀態上,為此系統必須加 入負載估測或結合其他控制法則。 再者,上述的控制器在傳統的設計上以離散式磁滯控制來實現,主要缺點是 切換頻率隨著系統參數改變,無法以固定的頻率做切換。如(78)所示,此一等效 控制可以視為穩態時期望的責任週期,其切換頻率可以經由固定頻率的三角波與 比較器電路產生固定頻率的脈波寬度調變的非線性控制。然而此等效控制並沒有 命令電壓的控制輸入[8],在本論文中提出的順滑模態控制器,加入誤差函數與誤 差函數的積分項於(75)中,即為: t. t. 0. 0. s = c1 x1 + c 2 ( x2 − x2 d ) + β ∫ ( x2 − x2 d )dt = cx + β ∫ ( x2 − x2 d )dt − c2 x2 d. 其中 x2 為系統輸出電壓, x2d 為命令電壓。 此順滑函數之一次微分為 ‐ 38 ‐ . (81).
(50) s = cx + β ( x2 − x2 d ) = v + Γz + β ( x2 − x2 d ). 在順滑平面上,存在等效控制 ueq 使得 s. ueq = (1 + f ( x ) ). −1. ( cAx + cd + β ( x. 2. u =ueq. (82) =0:. − x2 d ) ). (83). 將此等效控制代回經過轉換矩陣變換後的系統(68)式: v = −Γz − β ( x2 − x2 d ). (84). 因此,在順滑平面上系統成為 z = ( H11 − ΓH12 ) z +t1d. (85). s=0. (86). 其中(86)式與系統的穩定性無關。 比較(75)式與(81)式兩個順滑函數,前者利用轉換矩陣求得順滑函數的係數矩 陣 c ,將使得 cb = 1 ,且等效控制 ueq 代入原系統(61)式,可整理得. (. ). x = Aeq x + I − ( b + Nx ) (1 + f ( x ) ) c d. (. −1. (87). ). 其中,令 Aeq = I − ( b + Nx ) (1 + f ( x ) ) c A ,特徵方程式為: −1. ⎛ c2 ⎞ a21 − a22 ⎟ λ = 0 ⎝ c1 ⎠. λ2 + ⎜. (88). 由(88)式可知,其特徵值已經因為順滑函數控制到指定的一個特徵值與零。 若將(81)式獲得的等效控制 ueq 代回原系統(61)式,可整理得. ‐ 39 ‐ .
(51) (. ). x = Aeq′ x + I − ( b + Nx ) (1 + f ( x ) ) c d + ( b + Nx ) (1 + f ( x ) ) x2 d −1. −1. (89). 其中,令 Aeq′ = Aeq − ( b + Nx ) (1 + f ( x ) ) [0 β ] ,特徵方程式為: −1. ⎛ c2 ⎞ β a21 − a22 ⎟ λ + a21 = 0 c1 ⎝ c1 ⎠. λ2 + ⎜. (90). 其特徵值會因為 β 值的變化而移動,如圖 3.2.1 所示,當 β 值增加, Aeq′ 的特徵值 為共軛負根且虛部會隨著增加,並未使特徵值往負數平面的右半平面移動,所以 系統仍是穩定的,唯震盪現象的振幅會隨著 β 增加而增加。. 圖 3.2.1 加入積分器後, Aeq′ 特徵值的變化. 加入誤差積分項後,假設系統是鬆弛系統,初始值為零,當此系統啟動時, 系統軌跡即在順滑平面上,然而因為誤差項為負值,隨著時間增加,會將系統軌 跡帶離順滑平面,直到誤差項為正值且積分值抵消先前的積分結果,軌跡方能朝 向順滑平面前進。然而系統若僅存在如切換函數(34)形成的順滑平面,方程式(81) 的解是不存在的,因為切換函數形成的解適用於(75)式,使得狀態變數 x = 0 ,然 而我們的控制目標並非把電感電流與電容電壓控制到零。再者,因為順滑函數的 ‐ 40 ‐ .
(52) 係數值遠小於 β ,故我們選用順滑層的概念,允許系統軌跡回到順滑層後在順滑 層內遊走。由(81)式可知,當順滑函數穩定時在順滑層內,因為 c1 x1 ≠ 0 ,使得順 滑函數值不為零,換言之,積分項讓系統軌跡回到順滑層後,積分值為定值且約 等於 c1 x1 。. 3.2.3 步驟二:設計控制法則使得系統在有限時間內到達順滑平面 在 3.2.1 的步驟一假設在順滑平面 s ( x ) = 0 存在等效控制 ueq 使得(55)式成立, 此時令控制器之控制法則為 u = − (1 + f ( x ) ). −1. ( cAx + β (V. out. − Vref ) + ρ sat ( s ). ). (91). 其中 ρ 為大於零之任意數。可得,當 s ≥ ε 時,. (. )). (. ss = s cAx + β (Vout − Vref ) − cAx + β (Vout − Vref ) + ρsat ( s ) ≤ − ρ s < 0. (92). 如前述,當系統未到達順滑層時滿足迫近與順滑條件(Reaching and Sliding. Condition),系統軌跡在有限時間內接觸到順滑層並持續維持在此範圍內。所以前 述假設 Cb + CNx ≠ 0 成立,則選取此一控制法則,系統將實現順滑模態控制,也 因此在系統狀態空間存在區間使得此一假設成立,稱之為迫近與順滑區間. (Reaching and Sliding Region, RAS-Region),以二維相位平面(phase plane, 假設 n=2)為例並假設 Cb + C Nx > 0 ,其迫近與順滑區間如圖 3.2.2 所示。. ‐ 41 ‐ .
(53) X1 =. −b1 n11. 圖 3.2.2 灰色區間為 Buck 直流轉換器之迫近與順滑區間 相較於圖 3.1.6,此一迫近與順滑區間的條件除了 Cb + CNx > 0 外,還必須考 慮電路本身之特性,即電感電流恆正與電流電壓恆正之條件,故迫近與順滑區間 限制在第一象限。 在本章中,我們簡述順滑控制理論與設計步驟,並在選取一順滑函數使系統 穩定後,加入誤差函數與誤差函數的積分,修正切換函數為飽和函數後,設計控 制法則,讓系統在有限時間內到達順滑層,並在順滑層內遊走。因為順滑函數與 系統狀態有關,並不保證系統軌跡進入順滑層後不會再離開順滑層,但是由方程 式(92)可知,一旦系統軌跡不在飽和層內,其軌跡移動方向將朝著順滑層前進。 在下一章中將對此系統與控制器進行相關模擬與討論。. ‐ 42 ‐ .
(54) 第四章 Buck DC-DC Converter 之系統設計與模擬 在本章的第一節,將討論此直流轉換電路之規格與元件設計,第二節利用數 值模擬的方式驗證控制器輸出責任週期在數學模型上計算的結果。第三節利用. Matlab/SimPowerSystems 軟體模擬加入脈波寬度調變後系統軌跡與狀態輸出。. 4.1 系統規格與設計 在本章的模擬設計中,我們依據以下規格探討元件的選用,並討論元件參數 對系統之影響,並依據第三章所設計之控制法則設計控制器。 Parameters . Symbol . min . Typ . Max . Unit . Supply Voltage . Vcc . . 12 . . V . Operation Frequency . fOSC . . 40 . . kHz . Feedback Voltage . Vfeb . . 1.25 . . V . Vripple/Vout. . . 1 . % . RDS(on) . . 0.22 . 0.27 . Ω . On Resistance of Diode . Rdiode(on) . . 5 . . mΩ. Voltage drop of Diode . Vdiode . . 0.75 . . V. Load . RLoad . 5 . . 30 . Ω. Voltage drop during Load Change . Vdrop ε . . . 0.25 . V. . 10 −3 . . Output Ripple Voltage Static Drain‐Source On Resistance . Sliding Layer 表一. 系統規格. 前述之控制器假設工作於連續導通模式(CCM),換言之,穩態時電感上的電 流恆大於零。為簡化元件設計過程,僅考慮系統之理想模型,功率消耗的部分均 不考慮,亦即 rd = 0 ,rds = 0 ,rL =0 ,以及 VD =0。此外,電容的等效電容(equivalent. serial resistance,ESR)在下面的推導中不能被忽略,因為該非理想特性將影響電 容元件的選擇。 ‐ 43 ‐ .
數據



+6




Outline
相關文件
Ko, “Fast Intra Prediction Mode Selection Scheme Using Temporal Correlation in H.264,” IEEE International Region 10 Conference, pp. Yu, “A Fast Mode Decision Method for
D.Wilcox, “A hidden Markov model framework for video segmentation using audio and image features,” in Proceedings of the 1998 IEEE Internation Conference on Acoustics, Speech,
[16] Goto, M., “A Robust Predominant-F0 Estimation Method for Real-time Detection of Melody and Bass Lines in CD Recordings,” Proceedings of the 2000 IEEE International Conference
Then, these proposed control systems(fuzzy control and fuzzy sliding-mode control) are implemented on an Altera Cyclone III EP3C16 FPGA device.. Finally, the experimental results
IEEE 1394 Controller IC、無線週邊控制晶片 Wireless Peripheral Controller IC、滑鼠控制晶片 Mouse Controller IC、鍵盤控制晶片 Keyboard Controller IC、掃描器控制晶片
Leung, Shuk-Kwan S.; Chou, Hui-Chi(2012).A Survey Study on Parental Involvement in Mathematics Learning for Elementary School Children. Proceedings of the 36th Conference of
Leung, Shuk-Kwan S.; Chou, Hui-Chi(2012).A Survey Study on Parental Involvement in Mathematics Learning for Elementary School Children.. Proceedings of the 36th Conference of
Alonso, “Electronic ballast for HID lamps with high frequency square waveform to avoid acoustic resonances,” 2001 IEEE Sixteenth Annual Conference Record of the Applied
