1
Design and Contr ol of
an FES-Assisted Pedaling Wheelchair for Par aplegics
下肢癱瘓病患功能性電刺激輔助踩踏復健輪椅之設計及控制
計畫編號: NSC
90-2213-E-002-132
執行期間: 90/08/01 ~ 91/12/31主持人/執行單位: 章良渭 臺灣大學醫學院醫學工程研究所
Abstr act
A functional electrical stimulation (FES) assisted pedaling wheelchair were developed, in which an FES pedaling control and a front-disk motor control were included. A computer simulation for FES-assisted pedaling movement was investigated and it was experimentally validated on two healthy subjects. 中文摘要 在這篇研究報告中,我們將包含有電 刺激踩踏控制與輪椅馬達的控制的功能性 電刺激輔助踩踏復健輪椅,加上電刺激輔 助踩踏運動的電腦模擬,來模擬踩踏運 動。之後,並找來兩位一般健康受試者來 試驗此踩踏模擬系統,以證實此模擬系統 的效用。 1. Background
The FES-assisted pedaling wheelchair (Fig.1) combines the thoughts of the stationary FES cycling and the wheelchair mobility. An FES-assisted pedaling movement control system was designed to provide patients exercise to gain physiological benefits. A disk motor was mounted on the front wheel, the control of which was needed to provide transportation for patients. If we set the target speed of the wheelchair is higher than crank’s, the two control systems can be operated independently.
In this project, according to the established system model, a feedback speed control of the FES-assisted pedaling movement and a disk motor speed control were designed. A
computer simulation was performed and the control was tested experimentally on two healthy subjects.
Fig.1 The pedaling wheelchair with a disk motor incorporated on the front wheel
2. Procedure
The parameters of the PID speed controller for the disk motor were chosen. The identified FES-muscle parameters from the subjects were obtained for the pedaling control. The goal speeds of the wheelchair and the FES-assisted pedaling were 60 RPM and 40 RPM, respectively. The subject was requested to sit on the wheelchair and the stimulation region was determined with the seat configuration and the time span of the muscle response to a single stimulus. Electrode pads were placed on the quadriceps of the subject and the right knee was positioned in 90 flexion as the initial angle. ° LabVIEW was used to monitor the speed control performance of the wheelchair and the FES-assisted pedaling movement.
2
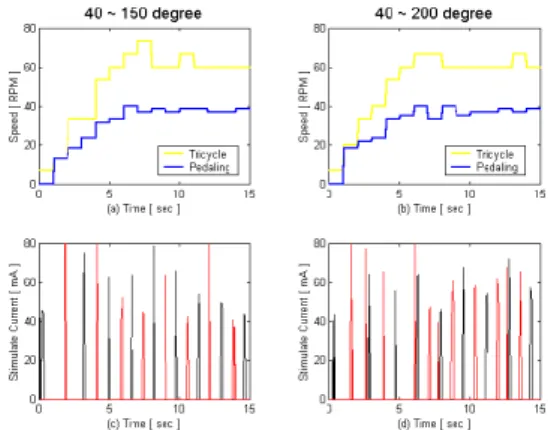
For pedaling model, the stimulation region is starting from the angle of knee maximum flexion to the angle of knee minimum flexion. It is between 40 to 200 degree in these subjects. To avoid the spillover of the FES induced muscle moment, a modified stimulation region of 40-150 degree was adopted. Figure 2 shows the speeds of two control systems in each stimulation region. With the modified stimulation region in both subjects, the system requires lesser stimulation currents.
Figure 3 shows the experiment results of pedaling speed control compared with the simulation results with the modified stimulation region. The simulation results showed underestimated currents and faster speed response. Nevertheless, the steady state response was predicted fairly nicely with the computer simulation.
4. Conclusion
With the computer simulation using a validated model, we can configure the pedaling control parameters in advance and simulate the system dynamics. It means clinicians can apply various sets of pedaling configuration design and then predict the results immediately in simulation without having clinical trials. In addition, researchers can further investigate how the system parameters affect pedaling performance through computer simulation. It was observed from the experiment results that more energy was consumed with the non-modified stimulation region and more moment was needed to keep steady pedaling than with the modified stimulation region. The stimulating current used in the non-modified stimulation region is therefore higher than that used in the modified stimulation current.
Fig.2 Data of the FES-assisted pedaling trials performed by subject B under modified and non-modified stimulation region.
Fig.3 Experiement results of the pedaling control (a,c) compared with the simulation results (b,d) on subject B with the modified stimulation region.
5. Reference
[1] Hung-Bin Chen, “System Design and Control of an FES-Assisted Pedaling Wheelchair for Paraplegics.”, Master thesis, Institute of Biomedical Engineering, National Taiwan University, 2001.
[2] M.L. Hull, and M. Jorge, ”A Method for Biomechanical Analysis of Bicycle Pedaling.”, J. Biomechanics, vol. 18, no. 9, pp. 631-644, 1985.
[3] D.N. Rushton, “Functional Electrical Stimulation.”, Physiol. Meas., 18, pp. 241-275, 1997.
![TraditionalMLCalgorithmsmainlytacklethebatchMLCproblem,wheretheinputdataarepresentedinabatch[24,28].Nevertheless,inmanyMLCapplicationssuchase-mailcategorization[22],multi-labelexamplesarriveasastream.Onlineanalysisistherefore dimensionreducermotivatedbyma](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)