Proceedings of the 2000 IEEE International Conference on Robotics & Automation
San Francisco, CA April 2000
Dynamic Scheduling Approach to Group Control of
Elevator Systems with Learning Ability
Yuan- Wei
Ho
and Li-Chen
Fu
Department of Computer Science and Information Engineering
National Taiwan University, Taipei, Taiwan,
R.O.C.
Abstract
In this paper; a hybrid model of a multiple elevator system is proposed, consisting of a color-timed transition Petri net (CTTPN) model and a set of control rules implemented via the so-called control places in the CTTPN model. The Petri net model is a highly modulized structure, whose constituent modules can be classiJed into four types: Call Management Module, Louding/Unloading Module, Basic Movement Module and Direction Reversing Module. The whole complete model is a combination of the copies of the above ,four modules. Since the j r i n g sequences of the CTTPN equate the evolution of the modeled system, they can be regarded as a schedule. A
dynamic scheduling with learning ability is proposed to obtain the desirable schedule. A new concept of control places is also introduced in the proposed model so as to make the modeling more precise and to reduce the reachability graph more efficiently. To show the,feasibility of the proposed method, an emulator in Elevator Control Kernel and Elevator Scheduler Kernel are constructed for demonstration.
1.
Introduction
An elevator system is used to supervise multiple elevators and to ensure that they are operated efficiently. The elevator group control system must decide which of several elevator cars should respond to a call made by passengers, in order to provide the highest possible level
of service. To build a good elevator system for solving the
elevator scheduling problem, we need to build an elevator model first to represent the cooperation of multiple elevators. Petri net has evolved into an elegant and powerful graphical modeling tool for asynchronous, concurrent event-driven system and, therefore, is chosen here as a suitable modeling tool.
However, the elevator system is usually involved with human behaviors and preferences. Very often, there may not exist an optimal scheduling solution and, hence, the control system must be flexible enough to handle all possibly incoming situation. In view of this, a hybrid Petri
net model is thus introduced in this paper to serve the
purpose, i.e., besides the conventional color-timed
transition Petri net model, several heuristic rules and control places are introduced to enrich the flexibility of the aggregate model. Upon the occurrence of an external event, the model will search for the feasible rules to adjust the marking of the resulting Petri net, whereby the hybrid
model will run properly to produce an adequate
scheduling result to handle that situation for service requirement.
Petri net [ l , 21 is a graphical and mathematical
modeling tool applicable to many systems. They are promising for describing and studying information processing systems that are characterized as being
concurrent, asynchronous, distributed, parallel,
nondeterministic, and/or stochastic. Petri net is a useful tool for modeling [3, 41, simulation, and flexible manufacturing sytems.
Researchers from many scientific disciplines are
designing artijkial neuronal networks (ANNs) [S, 61 to
solve a variety of problems in pattern recognition,
prediction, optimization, associate memory, and control [7,
81. Conventional approaches have been proposed for
solving these problems. Although successful application can be found in certain well-constrained environment, none is flexible enough to perform well outside its domain.
ANNs provide exciting alternatives, and many
applications could benefit from using them.
Due to the fast development of computer technology, integrated circuit (IC) and micro-computer are widely used in modern elevator system. The computer technology introduces the artificial intelligence (AI) technique into the
elevator group supervisory control system [9, IO]. The
fizzy control logics [ 11, 121 and expert systems are used
to analyze the traffic pattern and to predict the possibly
incoming call requests [ I O , 131. Moreover, the statistics
approximation is applied to estimate hall call waiting [ 141.
Conceivably, the utilization of the AI and expert systems in the context of elevator system control is an indispensable trend.
2.
Modeling and Scheduling
2.1
Systematic Modeling
Problem Description
-.
i
-
Contrrol Place Status Place Operation Transiton Onginal Transttron Figure 1: Types of places and transitions
In a typical elevator system, there are two types of calls. The hall call is given through buttons on the hall of the building, and the car call is given by the passengers inside the elevator. An elevator system has a pair of hall
call buttons on each floor, one for up hull call and the
other for down hall cull. As soon as a hall call button is
pressed, the elevator system must register the hall call, and selects and assigns an elevator to serve the hall call. After serving the hall call, the passenger should press the car call button to register his destination floor and the elevator must move up/down to stop at the destination floor. When all calls are served, the elevator gets look to an idle state. We can park an idle elevator at a specific floor to reach the goal of better performance, and then repeat the above operation again.
In this paper, we select the CTTPN to model our elevator system. In this CTTPN model, all the places and transitions can be classified into two categories listed
below as shown in Fig. 1 :
Control places:
These places represent the signals received from the world outside the elevator system or from the elevator system.Status place:
These places are used to record some specific information about the current elevator system.Ordinary transition:
These transitions are the same as the ordinary Petri Net. The transition will be fired immediately when the transition is enabled.Operation transition: The firing of an operation transition proceeds as in an ordinary Petri Net but with a modification: the tokens are added to the output places only after pre-assigned period of times depending on the color of the input place, which however are changeable from a firing to another. Note that the colors of the tokens in the places before and after the operation transitions can be different.
Figure 2 Call Management Module
service of some hall call may be a better choice, it is a
good opportunity to cancel the service and re-assign the hall call to another elevator car. We show the Call Management Module in Fig. 2.
LoadingKJnloading Module
The Loading/Unloading Module describes the event where passengers get into or get out of the elevator car. An elevator must be parked at the floors designated by the car calls, but it may not stop at the floors designated by the hall calls for some reasons. The Loading/Unloading
Module is shown in Fig. 3. Places in different modules but
with the same notations represent that they are shared among those modules.
Basic Movement Module
The Basic Movement Module describes the movement activities of each elevator between floors. The
Basic Movement Module is shown in Fig. 4. By repeating
this strategy for every suffix i, we can eventually construct
the full movement model of an elevator car. Then, by
For example,,,3.floor-7,, represents the #3
Due to the complexity Of describing various kinds Of adding a prefix serial number, we can represent different
behavior of a group of elevators, it is hard to construct the
Petri net model directly. Therefore, we first build four
kinds Of macro modules so that the Petri net elevator car is parked at or pass through the 7-th floor,
,411
places without suffix represent that they are shared among all elevators.
model can be constructed from these macro modules.
Call Management Module
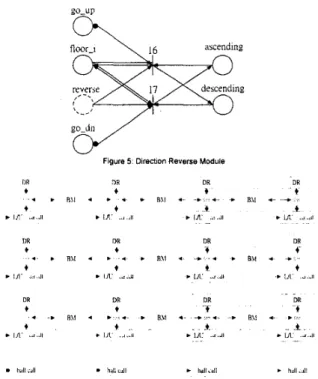
Direction Reversing Module
Direction Reversing Module describes the timing to
the moving direction of an elevator car, which is
Call Management Module is mainly used to manage the car calls and the hall calls. When the system finds that
ascending
transition
Figure 3: LoadinglUnloading Module
Figure 4: Basic Movement Module
shown in Fig 5. To check whether an elevator car can
reverse its moving direction, we must check all the hall
calls and car calls in its moving direction. In order to
simplify the model, we use simply the unbounded places "go-up" and "go-dn" to be the checking model.
A Simple Example
:Modeling with Modules
In Fig. 6 , we show a simple example. There are
three elevators in a building with four floors in the
example. The rectangles denoting "BM" represents the
Basic Movement Module, the rectangles denoting "DR"
represents the Direction Reversing Module, and the
rectangles denoting "L/U" represents the
Loading/Unloading Module. But the Call Management
Module consists of two kinds of rectangle, respectively,
denoting "car call" and "hall call". The circle, "floor",
represents a floor-i place for some i. We use the place
floor-i to connect the Basic Movement Module, the
Loading/Unloading Module, the Direction Reversing Module, and the Call Management Module. Similarly, we use places "hall call" to integrate different elevators into a group.
floor-i ascending
descending
go-dn
OJ
h d l i * l l hull id1 c hvll L d
.
U1.dFigure 6 A simple example of three elevators in a building with four floors
2.2
Rules of the Model
To combine the rules and Petri net model, we use the control places as an interface between the rules and the Petri net model.
Control Rules and Control Places
Rule 1) Assign tokens to Reverse:
When there is no more car call or hall call assignment
along the current moving direction of an elevator, the system can assign a token to the place reverse to reverse its moving direction.
Rule 2) Assign/remove tokens to or from Button :
Button places include up-hall-button-i,
down-hallbutton-i, and car-button-i places. When a hall/car button is pressed and that call has not been registered, the system will assign a token to the corresponding place.
Rule 3) Assign/remove tokens to or from
Cuncelerl_eveitt :
When the system finds an assignment better than the
one predicted previously, the system will assign a
token to the corresponding place cancel-service-i to cancel the previous assignment.
Another advantage of taking control places is. their
"flexibility". To adapt to various traffic conditions and
different performance criteria, we can elaborately assign the necessary tokens to the control places and guide the evolution of the Petri net model to suit our need.
tvcni
Select the Elevator with Minimum Extra Cost and
’ Set the Minmum Extra Cost to MinEcost
-
ISohcrlnlitie PIOLUII Block Dt;tar;ini
Figure 7: Block diagram of the dynamic scheduling
2.3
Dynamic Scheduling
In this paper, we want to generate the real-time schedule of an elevator system. The scheduler try to rninimize the passengers‘ average waiting time, the long wait probability, the riding time, the long riding probability, and power consumption.
We propose an event-driven elevator system to handle every event of an elevator system. Our events include hall calls, car calls, end-of-loading and tick.
“tick” is an event that is triggered every fixed time
interval, say, a second, by the system clock. Here, we also use tick as the time unit for tracing the transition of firings of our CTTPN model. The block diagram of the system is
shown in Fig. 7.
To provide satisfactory performance, we embed the sense of satisfaction of passengers into our elevator system, estimate detailedly the cost by simulation over our Petri net model, and refine the dispatching by an refinement algorithm.
Cost Functions
We try to simulate the real circumstance of elevator system by estimating cost with some accumulative cost functions. We take waiting time, riding time, and power consumption as parameters of our cost estimation. The cost of waiting is piecewise linearly increasing with time, and the cost of riding is considered with both the riding time and the moving distance. We define a aggregate weight cost:
cost = waiting cos^ + riding cost
+
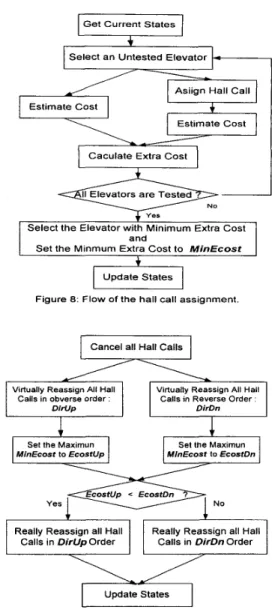
power costHall Call Assignment
In our system, when a hall call occurs, we first
assign the hall call to an elevator randomly. Then, we simulate the consequence of the assignment by evolving from the current marking to a goal marking over our Petri net model, and record the total evolution cost. After that, we assign the hall call to another elevator and repeat the above steps. After the exhausted simulations, we choose the elevator with the minimum cost as our preferable dispatching. Fig. 8 shows the flow of the hall call assignment.
Estimate Cost
e---1
II Elevators are Tested .I
Update StatesI
Figure 8: Flow of the hall call assignment.
I
Cancel all Hall CallsI
Virtually Reassign All HallCalls in obverse order :
Virtually Reassign All Hall Calls in Reverse Order :
Set the Maximun MInEcost to EcostDn
Set the Maximun MInEcost to EcostUp
‘ :
-TI EcostUp c EcostDn ?
Calls in DirUp Order Calls in DirDn Order
Figure 9: Flow of the refinement algorithm.
Two-way
Refinement
When any of the aforementioned events occurs, the prediction made in hall call assignment should be updated, and the dispatch should be updated as well. To resolve the above problem, we first make an implicit assumption that, whenever an event occurs, the influence to the optimality of the previous schedule should be local. Thus, we try to correct our schedule to approach the optimal schedule. However, such assumption may not adequate, but it is hardly possible to schedule the whole system again in a real-time system. Hence, we propose an algorithm that focuses on the solution set near our previous schedule to
search for a refined one. Fig. 9 shows the flow of the Two-
Way ReJinement Algorithnz. The algorithm is efficient and
economic, because it only takes constant memory and occupies little CPU times. Such desirable performance can be observed in the simulation results.
.Y, = MN'W- .Y2 = MH( ./.'+ , \ I = MH( 'N- )! .Y, =M('('/.'- I'! X, =M('('N- .Y, = MSN +
Fig. 10: Network structure EBP
3.
Learning Ability
Why Back-Propagation (BP)?
Back-Propagation(BP) is the most popular neural
network. It has been applied successfully in a variety of
diverse areas. Prediction and classification are the main tasks of BP. In the elevator system, there are various types of passenger traffic, thus we want to cluss$jj traffic pattern and then predict the floor that an idle elevator should be parked at.
Back-Propagation (BP) applied in Elevator
System
The most important criterion of the elevators system is waiting time. Besides speeding up the elevator, learning is a better choice to minimize the waiting time. If the scheduler could know the traffic pattern by analyzing the current statistic data, it would park the elevator at the proper floor to minimize the next passenger's waiting time. This is why elevators system should learning. We
construct a network structure EBP ( 7 x 10 x 3 ) as Fig.
IO.
0
1.
2.
3. MHCN: The number of hall calls at the floor
4. 5.
6 .
7 .
There are seven input variables in input layer :
MWTF: The floor with max. waiting time. MHCF: The floor with max. hall call. MHCF.
MCCF: The floor with inax. car call.
MCCN: The number of car calls at the floor MCCF. MSF: The floor with inax stops.
MSN: The number of stops at the floor MSF.
0
1. Up Peak Pattern: If
2.
There are three output variables in the output layer :
= U , the traffic pattern is
Up Peak from floor 'U'.
Down Peak Pattern: If y2 = d , the traffic pattern is Down Peak to floor 'd'.
Inter Floor Pattern: If
&
= I , the traffic pattern is Inter Floor.3.
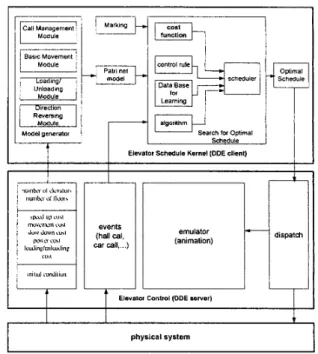
Pall net
"i
Schedule Elevator Schedule Kernel (DOE client)
(animation) car call, ..)
E I w a t ~ Control (ODE server)
dispatch
0
+
physical system
Figure 12: The hierarchical view of the elevator system
For example, if the output vector of the neural
network is [l,O,O], we can identify the running traffic
pattern is Up Peak from floor '1'. O f course, the scheduler
should park the idle elevator at floor 'l'..
Mode 1: Scheduler catches the output data of neural network from 20 minutes ago. If the traffic pattern system is running is wrong, system will change into the right
pattern in 20 minutes. Hence, this mode is suitable for a
building with variant traffic pattern.
Mode 2: Scheduler catches the output data of neural
network from yesterday. The mode is suitable for the building with regular pattern and the patterns in everyday are almost the same.
Mode 3: Scheduler catches the output data of neural
network from a week ago. This pattern is modified from
mode 2. The system with mode 3 will perform well in
office building.
Mode 4: Scheduler catches
network from a month ago.
mode 3. This is for special
building manager.
4. Simulation
Implementation
the output data of neural
Mode 4 is expanded from
case to reach the goal of
The hierarchical view of the elevators system is shown in Fig. 12. In this paper, we focus on the Elevator Schedule Kernel and the interface between schedule
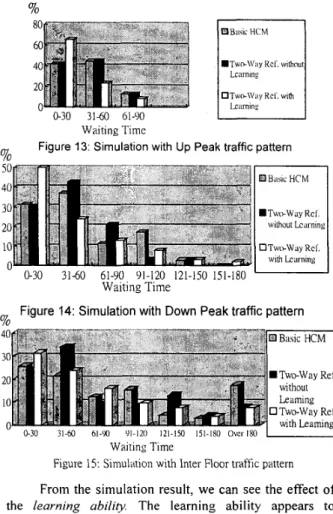
kernel and control kernel. Fig. 13, 14. 15 show the
simulation result.
% 80 60 40 20 0 0-30 3140 61-90 Waiting Time
Figure 13 Simulation with Up Peak traffic pattern
YO
” 030 31-60 61-90 YI-120 121-150 151-180
Waiting Time
Figure 14: Simulation with Down Peak traffic pattern
I - I W uvcr I W I I
Waiting Time
Figure 15: Simulation with Inter Floor traffic pattern From the simulation result, we can see the effect of the learning abdiy. The learning ability appears to minimize the average waiting time especially in Up Peak traffic pattern. The Two- Way Refinement Algorithm seems
to reduce the long-wait probability especially in Down
Peak traffic pattern. The theoretical model fits the experimental data well.
5.
Conclusion
In this paper, we proposed a systematic Petri net based modeling for an elevator system. The entire model is composed of four types of modules, Basic Movement
Module, Loading/Unloading Module, Direction Reversing Module, and Call Management Modules. In these modules, the control places are utilized to simplify the complexity of the Petri net model, and the control rules are used to satisfy human nature and to approach the goal of efficiency.
To obtain an efficient schedule, we propose an event driven dynamic scheduling and corresponding algorithms. The strategy helps us to handle an elevator system with insufficient information and uncertain events. We estimate the cost of dispatching by Hall Call Assignment Method. The assignment method precisely computes the cost over our CTTPN model. And the Two-way Refinement
Algorithm is simple and efficient to refine our schedule in
a real time system. The learning ability also helps us to
know the traffic pattern the elevator system is running. A
historic data base and traffic pattern analyzer has been included to make the learning ability more precisely.
Reference
[ 11 C. A. Petri, “Kommunikation mit Automaten,” Ph.D.
Dissertation, University of Bonn, Bonn, West- Germany, 1962.
[2] James L. Peterson, Petri Net Theory and the Modeling
of Systems, Prentice-Hall, INC., Englewood Cliffs, N.J.
07632, 1981.
[3] Chin-Jung Tasi, Li-Chen Fu and Yung-Jen Hsu, “Modeling and Simulation for Flexible Manufacturing
Systems Using Petri Net,” 2nd Int. Conf on Automat.,
[4] Chu-Hui Lin and Li-Chen Fu, “Petri Net Based Dynamic Scheduling of an Elevator System,” IEEE Znt.
Conf on Robotics and Automat., vol. 1, pp. 192- 199,
1996.
[5] Jain, Ani1 K., and Mao, Jianchang, “Artificial Neural Networks: A Tutorial,” Computer vol. 29, no. 3, pp. 3 1-44, Mar., 1996.
[6] Simon Haykin, “Neural Networks (A Comprehensive Foundation),“ Macmillan College Publish Company, Inc. 1994.
[7] Sperduti, Alessandro, and Starita, Antonia,
“Supervised Neural Networks for the Classification of
Structures,” IEEE Trans. on Neural Networks vol. 8,
no. 3, pp. 714-735, May, 1997.
[SI Kogiantis, Achilles G., and Papantoni-Kazakos, Titsa, “Operation and Learing in Neural Networks for Robust Prediction,” IEEE Trans. Syst., Man, and
Cybern., Part B, vol. 27, no 3, pp. 402-41 1, 1997. [9] N. Kameli, K. Thangavelu, ”Intelligent Elevator
Dispatching System,” AI Expert, pp. 32-37, Sep. 1989.
[lo] H. Aoki, K. Sasaki, “Group Supervisory Control
System Assisted by Artificial Intelligence,“ Elevator
World, pp. 70-80, Feb. 1990.
[ l 11 Chang Bum Kim, Kyoung A. Seong, Hyung Lee- Kwang, Jeong 0. Kim, and Yong Bae Lim, “A Fuzzy Approach to Elevator Group Control System,” IEEE
Trans. Syst. Man Cybern., vol. 25. NO. 6, pp. 985-990,
Jun. 1995.
121 Chang Bum Kim, Kyoung A. Seong, Hyung Lee-
Kwang, and Jeong 0. Kim, “Design and
Implementation of a Fuzzy Elevator Group Control
System,” IEEE Trans. on Syst., Man, and Cybern.,
Part A, vol. 28, no. 3, pp. 277-287, May 1998. 131 S. Tsuji, M. Amano, S. Hikita, “Application of the
Expert System to Elevator Group-Supervisory
Control,“ IEEE 5th Conf of Arit$cal Intelligence
Applications, pp. 288-294, 1989.
[14] Young Cheol Cho, Zavarin Gagov, and Wook Hyun Kwon, “Elevator Group Control with Accurate
Estimation of Hall Call Waiting Times,” IEEE Int
Conf on Robotics and Automat., vol.1, pp. 441-452, 1999.
~01.4, pp.31-38, 1992.