國立交通大學
顯示科技研究所
碩 士 論 文
以電腦全像片實現之遠場繞射投影顯示技術
Research on Far-Fileld Diffraction Imaging System Using Computer
Generated Hologram
研 究 生:江昶慶
指導教授:許根玉 教授
以電腦全像片實現之遠場繞射投影顯示技術研究
Research on Far-Fileld Diffraction Imaging System Using Computer
Generated Hologram
研 究 生:江昶慶 Student:Chang-Ching Chiang 指導教授:許根玉 教授 Advisor:Ken-Yuh Hsu 國 立 交 通 大 學 顯 示 科 技 研 究 所 碩 士 論 文 A ThesisSubmitted to Display Institute
College of Electrical Engineering and Computer Science National Chiao Tung University
in partial Fulfillment of Requirements for the Degree of Master
in
Display Institute , July 2011
Hsinchu, Taiwan, Republic of China
以電腦全像片實現之遠場繞射投影顯示技術研究 學生:江昶慶 指導教授:許根玉 國立交通大學顯示科技研究所碩士班 摘 要 本論文探討使用空間光調制器顯示電腦全像片,並經由遠場繞射成像之 投影顯示系統研究。我們分別使用遞迴傅立葉演算法以及對稱遞迴傅立葉 演算法設計電腦全像片,再經由遠場繞射之傅立葉轉換即可成像。我們以 電腦模擬其成像特性,並架設光學成像系統驗證之。最後根據實驗結果, 分析此投影顯示系統的限制及可行性。
Research on Far-Field Diffraction Imaging System Using Computer Generated Hologram
Student:Chang-Ching Chiang Advisor:Ken-Yuh Hsu
Display Institute
National Chiao Tung University
ABSTRACT
In this thesis, we discuss a projection display system by use of computer generate hologram(CGH). A Kinoform CGH is designed by the iterative Fourier transform algorithm and symmetrical Iterative Fourier transform algorithm. And use Fourier transform reconstruct image from far-field diffraction. We simulate the characteristics of reconstruction image and set up a imaging system to verify the result. Finally we analyze the feasibility and restrict of the imaging system
誌 謝 從進入了交大光電系就讀,到交大顯示所畢業,在新竹總共待了六年的時間。能順 利的完成碩士論文,首先要感謝我的指導教授 許根玉老師,許老師除了知識之外,更 教導了我認真做事的道理,使我能將論文及研究做到完美。林烜輝老師,指點我許多實 驗技巧,以及解決問題的方法。 接著要感謝實驗室的前輩們,Vera、仁崇、柏霖、俊華、啟新、翊安、男哥、阿龍, 在我有問題時,總是給我許多支援及幫助。還有共同奮鬥的夥伴,功賀、信甫、怡安、 小個、翊生,因為有你們的陪伴與激勵,我才能一路堅持到最後。 感謝我的父母無條件的支持與鼓勵,並且包容我所有任性的要求,並讓我能無後顧 之憂的在新竹唸書。感謝所有在交大期間相識的所有朋友們,因為你們,使我最後的讀 書生涯能夠如此豐富而多彩,與你們的一切將是我最珍貴的回憶。 最後,感謝交大的一切,能在這麼好的地方學習、成長,是我人生中最寶貴的收穫。
目錄
中文摘要 ... I 英文摘要 ... II 誌謝 ... III 目錄 ... IV 圖目錄 ... V 表目錄 ... VI 第一章 緒論 ... 1 1.1 電腦全像術簡介 ... 1 1.2 電腦全像投影顯示系統簡介 ... 2 1.2.1 投影顯示系統簡介 ... 2 1.2.2 電腦全像投影顯示系統 ... 2 1.3 論文架構 ... 3 第二章 相位電腦全像片的設計與模擬分析 ... 4 2.1 相位電腦全像片之設計 ... 4 2.1.1 遞迴傅立葉演算法 ... 4 2.1.2 對稱遞迴傅立葉演算法 ... 6 2.2 SLM 光學成像模擬 ... 8 2.2.1 遠場繞射 ... 8 2.2.2 SLM 遠場繞射成像 ... 11 2.3 目標影像及光學成像系統設計 ... 16 2.3.1 目標影像設計 ... 16 2.3.2 光學成像系統設計 ... 17 2.4 電腦全像片參數分析 ... 19 2.4.1 方均根誤差值 ... 19 2.4.2 遞迴圈數之影響 ... 20 2.4.3 相位取樣之影響 ... 23 2.5 運算時間分析 ... 25 第三章 矽基液晶顯示器相位調製特性量測 ... 27 3.1 LCOS 顯示器簡介 ... 27 3.2 LCOS 相位調制特性量測 ... 29 3.3 LCOS 相位及振幅調制實驗測量結果 ... 32 第四章 LCOS 光學重建電腦全像片實驗結果 ... 37 4.1 光學實驗架構 ... 37 4.1.1 成像系統 ... 37 4.1.2 表面不平整現象之電腦模擬 ... 42 4.2 光學成像實驗 ... 434.2.1 遠場繞射成像實驗 ... 43 4.2.2 遠場繞射實驗 ... 45 4.2.3 二元影像之光學成像 ... 49 4.2.4 灰階影像之光學成像 ... 51 4.2.5 繞射效率分析 ... 54 4.3 實驗結果討論 ... 55 第五章 結論 ... 58 參考文獻 ... 59 附錄一 ... 61 附錄二 ... 64
圖目錄
圖 1 電腦全像投影顯示系統示意圖 ... 3 圖 2 IFTA 運算流程圖 ... 6 圖 3 SIFTA 訊號區與雜訊區示意圖 ... 7 圖 4 將圖 3 以 SIFTA 設計之電腦全像片之電腦模擬重建影像 ... 8 圖 5 孔徑繞射光場示意圖 ... 9 圖 6 SLM 畫素分佈示意圖 ... 11 圖 7 相鄰兩點干涉示意圖 ... 13 圖 8 二元目標影像 ... 14 圖 9 電腦模擬光學重建影像 ... 15 圖 10 修正設計之目標影像 ... 17 圖 11 修正影像之電腦模擬重建影像 ... 17 圖 12 縮小電腦全像片之 4f 光學成像系統 ... 18圖 13 IFTA 及 SITFA 電腦全像片其重建影像之 RMSE 對遞迴圈數關係圖 ... 21
圖 14 IFTA 及 SITFA 電腦全像片其重建影像之 RMSE 對相位取樣關係圖 ... 23
圖 15 LCOS 結構示意圖 ... 27 圖 16 45°扭轉液晶盒示意圖 ... 28 圖 17 將 LCOS 視作一穿透式液晶盒結構示意圖 ... 29 圖 18 LCOS 雙狹縫實驗架構圖 ... 30 圖 19 LCOS 之不同灰階對應雙狹縫示意圖 ... 30 圖 20 雙狹縫實驗條紋位移示意圖 ... 32 圖 21 雙狹縫 ... 32 圖 22 CCD ... 33 圖 23 CCD 擷取之干涉條紋 ... 33 圖 24 輸入相對灰階為 0 時,CCD 擷取之干涉圖形及水平方向取樣圖形 ... 34 圖 25 輸入相對灰階為 128 時,CCD 擷取之干涉圖形及水平方向取樣圖形 ... 35
圖 26 低通濾波處理後,輸入相對灰階為 0 與 128 之干涉條紋位移 ... 36 圖 27 輸入灰階對應相位及振幅調制圖 ... 36 圖 28 光學成像系統 ... 37 圖 29 測試用目標影像 ... 38 圖 30 不同位置擷取之影像 ... 38 圖 31 麥克森干涉實驗架構圖 ... 39 圖 32 LCOS 與平面鏡之麥克森干涉圖形 ... 39 圖 33 反射面光程差示意圖 ... 40 圖 34 輸入不同灰階時,麥克森干涉圖形 ... 41 圖 35 不平整相位差之模擬 ... 42 圖 36 電腦模擬 LCOS 表面不平整之重建影像 ... 42 圖 37 未修正設計之目標影像 ... 43 圖 38 IFTA 光學重建影像 ... 44 圖 39 未修正設計重建影像之局部放大圖 ... 45 圖 40 目標影像“F” ... 46 圖 41 不同解析度之“F”字樣重建影像 ... 47 圖 42 重建影像局部放大圖 ... 48 圖 43 二元影像實驗目標影像 ... 49 圖 44 IFTA 之電腦重建影像 ... 50 圖 45 SIFTA 之電腦重建影像 ... 51 圖 46 四階之灰階測試影像 ... 52 圖 47 四階灰階重建影像 ... 52 圖 48 灰階目標影像 ... 53 圖 49 灰階之光學重建影像 ... 54
表目錄
表 1 IFTA 及 SITFA 設計不同迴圈數時之電腦模擬重建影像 ... 22 表 2 IFTA 及 SITFA 設計不同相位取樣時之電腦模擬重建影像 ... 24 表 3 實驗室電腦配備 ... 25 表 4 以 IFTA 及 SIFTA 設計不同解析度電腦全像片之運算時間 ... 25 表 5 HOLOEYE LC-R2500 規格表(HOLOEYE 公司提供) ... 28 表 6 IFTA 與 SIFTA 設計灰階影像之重建影像平均能量分佈 ... 53 表 7 IFTA 重建影像之理論及實驗繞射效率 ... 55 表 8 SIFTA 重建影像之理論及實驗繞射效率 ... 55第一章 緒論
1.1 電腦全像術簡介
全像術是由 Denis Gabor 於 1948 年所發明[1],其提出一種波前重建之 方法,利用同調之參考光與物體光干涉,記錄下一物體光場之振幅及相位 資訊,再用參考光可重建原物之光場。全像術能夠記錄並重建一複數振幅 光場,不同於傳統照相只能記錄光場強度資訊。傳統全像利用干涉記錄光 場資訊,而光學干涉對於外界干擾十分敏感,記錄時需避免震動及空氣擾 動,以避免干涉條紋位移變化,導致記錄資訊模糊。 而後,B. R. Brown 以及 A. W. Lohmann 在 1966 年發明了不需光干涉記 錄的電腦全像片,其方法稱為相位繞道法(Detour Phase Method) [2],首先由 電腦計算目標影像光場之離散傅立葉轉換(Discrete Fourier Transform,簡稱 DFT),其次,將計算求得之複數振幅光場分佈,以相位繞道編碼方式將之 設計成黑白之二元圖案,然後利用照相微縮記錄將其於底片上,即得到一 具有二元振幅透射度之電腦全像片。相位繞道電腦全像片之重建,是以適 當角度之平行光入射,在傅立葉平面可重建目標影像光場。 電腦全像片是以電腦計算計算設計,不需要光之干涉記錄,製作時可免 除光波干涉之嚴苛限制,並且可以自由的設計各種功能性的全像光學元件, 若將電腦全像片顯示於空間光調制器(Spatial Light Modulator,簡稱 SLM) 上,亦可做為動態光學元件。目前電腦全像片在許多方面有發展及應用, 例如複合式全像[3]、全像 3D 顯示[4][5][6]、動態光鉗[7]、影像去雜訊[8]、 資訊加密[9]以及光束整形[10]…等等。1.2 電腦全像投影顯示系統簡介
使用電腦全像投影與一般之投影系統之成像原理不同,本節將簡介投影 顯示系統與我們設計的電腦全像投影系統架構。1.2.1 投影顯示系統簡介
投影顯示是利用照明光源照射物體,將物體之透射光或反射光經由透鏡 成像系統,將物體之實像放大成像於屏幕上之方法。投影顯示系統通常是 由照明光源、欲顯示之影像、成像透鏡組以及成像屏幕所組成。 目前市面上之數位投影機使用 SLM 來顯示目標影像,通常使用的 SLM 有穿透式之液晶顯示器(Liquid Crystal Display,簡稱 LCD)、反射式之矽基 液晶顯示器(Liquid Crystal on Silicon,簡稱 LCOS)或反射式的數位微型反射 鏡(Digital Micro Mirror Device,簡稱 DMD)。由 SLM 顯示的影像,利用成 像透鏡放大成像在屏幕上,由於透鏡成像會產生像差,使得屏幕上之影像 產生形變失真。因此,需針對不同投影距離以及投影機之結構,利用光學 設計來獲得一適當的成像透鏡組,以減小像差之影響[11]。1.2.2 電腦全像投影顯示系統
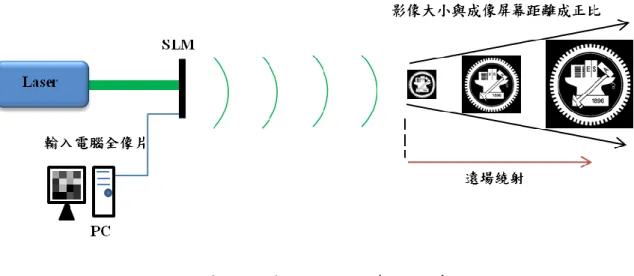
我們設計的電腦全像投影系統,是以遠場繞射來成像。其觀念是利用傅 立葉轉換之特性:一函數經由連續兩次傅立葉轉換,將會得到一與原函數 分佈相同而座標相反之函數,如式(1)所示,式中 為傅立葉轉換之符號。 (1) 電腦全像投影顯示系統示意圖如圖 1 所示,其工作方式是先設計傅式轉 換電腦全像片,將其顯示於 SLM 後以同調雷射光源照射,最後經由光學傅 立葉轉換成像。光學傅立葉轉換可經由遠場繞射(Fraunhofer Diffraction)而達 成,只要當成像屏幕與電腦全像片之距離夠遠,達到遠場繞射條件後,則 無論成像屏幕在何處都是一傅立葉轉換,不論遠近可處處成像,其成像大 小與距離成正比,其成像性質將在 2.2 節推導。圖 1 電腦全像投影顯示系統示意圖 然而遠場繞射之距離與電腦全像片尺寸有關,太大的電腦全像片將會使 遠場繞射距離過遠,但太小的電腦全像片其解析度又受到限制。因此我們 設計一 4f 系統將電腦全像片縮小,使其能符合遠場繞射之限制,並增加可 成像的解析度,其設計將在 2.3 節說明。
1.3 論文架構
本論文探討使用 LCOS 顯示相位電腦全像片,來研究經由遠場繞射成像 之投影顯示系統之可能性。第一章簡介電腦全像片,以及電腦全像投影顯 示之觀念。第二章研究相位電腦全像片設計,分析其成像特性,並以電腦 模擬光學成像結果,最後依據光學成像特性設計影像以及成像系統。第三 章介紹 LCOS 之原理,並設計實驗量測其光學調制特性。第四章進行光學 實驗,展示成像結果並分析系統特性。第五章為結論。第二章 相位電腦全像片的設計與模擬分析
在本章中,我們使用遞迴傅立葉演算法以及對稱遞迴傅立葉演算法設計 電腦全像片。由傅立葉光學的特性,利用電腦模擬 SLM 顯示相位電腦全像 片之光學重建影像。由光學重建影像的特性,我們將修正目標影像之設計, 來避免重建影像中之雜訊干擾,並以之設計光學成像系統。最後我們探討 不同演算法之重建影像品質,以及電腦運算時間,還有利用圖形處理器 (Graphic Processing Unit,簡稱 GPU)加速運算之結果。2.1 相位電腦全像片之設計
我們採用的電腦全像片為純相位調制式的 Kinoform[12],其設計方法是 將目標影像經由電腦計算數位傅立葉轉換後(Digital Fourier Transform),求 得複數振幅函數,其次,該複數函數的振幅項皆令為常數,只保留其中的 相位函數並將其數位化而得之。由於 Kinoform 只調制入射光場之相位,對 於入射光之振幅為完全透射,相較於振幅調制式電腦全像片,其透光率以 及繞射效率都較佳。 因為設計 Kinoform 時捨棄振幅資訊,且將相位取樣數位化,這些因素 將會影響重建影像的品質,因此我們需要尋求演算法來增進 Kinoform 的成 像品質。由於在我們的投影顯示系統中,我們只能看見重建影像的強度, 而並無法看到其相位部份,因此我們並不關心重建影像的相位分佈。 在這個前提下,基於 Gerchberg-Saxton 演算法[13]演伸的遞迴傅立葉轉 換演算法(Iterative Fourier Transform Algorithm,簡稱 IFTA)[14],以及對稱
遞迴傅立葉演算法(Symmetrical Iterative Fourier Transform Algorithm,簡稱
SIFTA)[15]可以適用於我們的系統,接下來我們將介紹其演算法以及特性。
2.1.1 遞迴傅立葉演算法
IFTA 之基本想法,是引入了相位自由度(Phase Freedom)的概念,其設 計是在影像空間及傅立葉空間中設定一振幅限制,在每次遞迴運算中將振 幅限制代入而保留相位,經由反覆迭代運算而得到最終的相位訊號修正結 果。
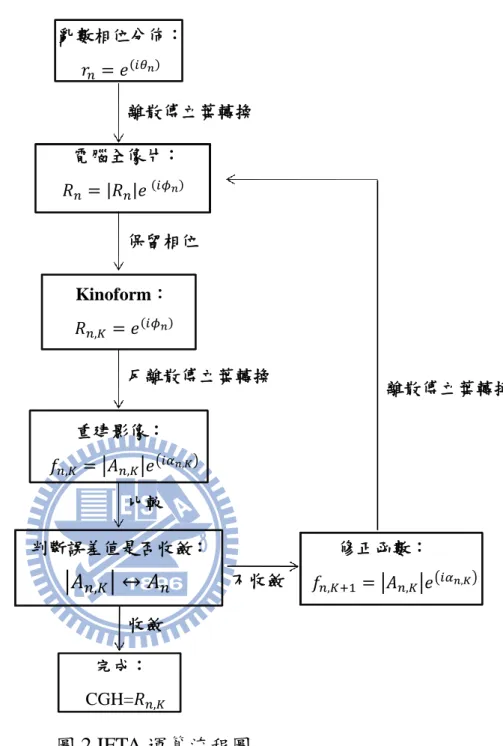
在 IFTA 運算中,傅式空間也就是電腦全像片,其限制為均一的振幅。 而影像空間之限制,則是我們目標影像之振幅。最後經由 IFTA 設計之電腦 全像片,由於振幅限制均一而只有相位調變,這就是純相位式的 Kinoform。 其重建影像將會得到與目標影像相同振幅,但是具有某一任意相位的光 場分佈。而在振幅相同的情況下,無論其相位如何分佈,所觀察到的光強 度都是相同的,因此我們就可以觀察到預期的影像。 在此以一維函數以簡化說明 IFTA 之運算過程,流程圖如圖 2 所示,設 欲顯示之目標影像之振幅分佈是 ,代表第 個畫素之振幅,其運算流 程如下: (1). 產生一個亂數相位分佈之矩陣 , 代表第 畫素之相位。 (2). 求電腦全像片:對 執行離散傅立葉轉換,得到複數分佈函數 。 (3). 令 之振幅設為常數,保留相位項 而得到 CGH: , 代表此電腦全像片為第 次迴圈時所產生。 (4). 由電腦全像片重建影像:對 執行反離散傅立葉轉換, 得到一個還原影像 。 (5). 將此影像之振幅分佈 與目標影像 比較,當誤差值降低到可容許 值之下時,則停止迴圈,此時之電腦全像片即為目標。 若否,則將此重建影像之強度分佈,替換成原始影像之強度分佈, 得到修正函數 。 (6). 將此修正函數 代回步驟(2)之迴圈重複運算,直 到誤差值降低達容許值之下時為止,得到最終之電腦全像片。
圖 2 IFTA 運算流程圖
2.1.2 對稱遞迴傅立葉演算法
SIFTA 與 IFTA 之不同點,在於除了相位自由度之外,SIFTA 多使用了 振幅自由度(Amplitude Freedom)。然而重建影像中即使相位任意分佈也不影 響我們觀察影像,但是若是連振幅都為任意分佈,那如何能得到預期的影 像呢? 因此在設計電腦全像片時,SIFTA 是將重建影像的區域分成訊號區與雜 訊區,訊號區與雜訊區分別標記為 S 與 N,如圖 3 所示。訊號區中為我們 目標影像: 亂數相位分佈: 電腦全像片: 離散傅立葉轉換 保留相位 Kinoform: 反離散傅立葉轉換 重建影像: 比較 判斷誤差值是否收斂: 收斂 不收斂 完成: CGH= 離散傅立葉轉換 修正函數:
想要重建的目標影像,雜訊區則先設定為 0。在 SIFTA 中振幅自由度的意 思,代表我們不去限制雜訊區的振幅變化,而只修正訊號區的影像。訊號 區與雜訊區之位置可以任意放置,其相對比例也沒有固定比例,端看我們 設計的需求而定,在此我們將訊號區放置於右下角四分一處,而其他四分 之三則為雜訊區,原因將於 2.3 節說明。 圖 3 SIFTA 訊號區與雜訊區示意圖 SIFTA 的運算流程與 IFTA 類似,在此就不重複說明,唯一不同之處在 於 IFTA 之修正函數是將重建影像的振幅替換成目標影像,並且保留重建影 像的相位。而 SIFTA 對位於雜訊區之振幅及相位都保留,只修正補償訊號 區之重建影像,如(2)式所示: , , (2) 式中: 由(2)式可知,SIFTA 對於訊號區之補償方式,是將重建影像中低於目標 影像則的部份加強,而高於目標影像的部份則把它減弱。 訊號區(S) 雜訊區(N) (3)
舉例來說,現在我們用 SIFTA 將圖 3 設計成電腦全像片,設定相位取 樣為 256 階,並執行 200 次遞迴運算後,其電腦模擬重建影像如圖 4 所示。 圖 4 將圖 3 以 SIFTA 設計之電腦全像片之電腦模擬重建影像 由圖 4 之電腦模擬重建影像發現,SIFTA 由於多了振幅自由度,以及訊 號區的振幅修正,訊號區的重建影像品質較佳,然而相對的將會有能量散 佈在雜訊區。另外由於 Kinoform 編碼時,其解析度與重建影像相同,因此 SIFTA 設計的電腦全像片之解析度,將大於我們像要的目標影像解析度。 IFTA 與 SIFTA 之程式碼,參照附錄一與附錄二。
2.2 SLM 光學成像模擬
光學成像系統是將電腦全像片以 SLM 顯示,並經由遠場繞射成像,在 此我們將推導利用 SLM 顯示之電腦全像片,其遠場繞射重建影像。2.2.1 遠場繞射
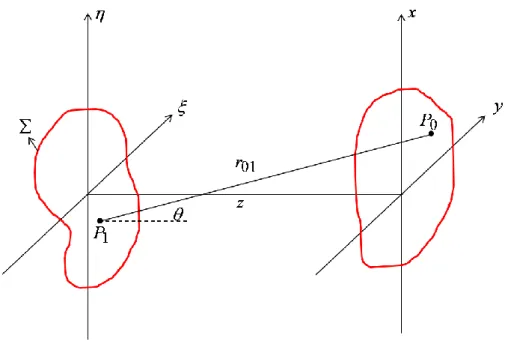
首先我們推導一繞射孔徑經過遠場繞射後之成像。假設一繞射孔徑位於 平面,一往 方向傳播之平面波入射此孔徑後,其出射光場繞射至一 與 平面平行,且距離為 之 觀測平面上,圖 5 所示。圖 5 孔徑繞射光場示意圖 根據惠更斯-菲涅耳光波繞射原理(Huygens-Fresnel Principle),此孔徑之 繞射光波可寫成: 其中 為光波波長, 為觀測平面之繞射光場分佈, 為平行光 入射繞射孔徑後,經由繞射孔徑調制後之出射光場, 為繞射孔徑上之點 到觀測平面之一點 之距離, 為 與 軸之夾角,(4)式中 可寫成: (5) 將(5)式代入(4)式: 其中r0 1為: (7) (4) (6)
考慮一般情況下繞射孔徑與繞射屏幕之距離 遠大於孔徑大小,也就 是當 時。我們可以利用二項式展開將r0 1展開並近似: (8) 將(8)式代入(6)式: 將(9)式積分式內之指數展開,並將不影響積分之部份提出,可將繞射公 式整理成: 接下來考慮觀測距離 夠遠,使得繞射孔徑上任一點可以滿足下列條件: 式(11)即為遠場繞射條件,較不嚴苛的遠場繞射條件可定為: D 為繞射孔徑的大小。 當滿足遠場繞射條件後,我們可以將(10)式整理成: 式(13)即為所謂的遠場繞射。由於人眼或一般的光感測裝置只能觀察到 光場之強度分佈,因此實際上我們看到的繞射影像,可以將(13)式絕對值平 方後得到: (9) (10) (13) (12) (11)
(14)式中 為一常數,絕對值內之積分式,正好就是此繞射孔徑之傅立葉 轉換,觀察到的遠場繞射影像與此繞射孔徑之傅立葉轉換有關。
2.2.2 SLM 遠場繞射成像
接著我們將設計之電腦全像片,以一可調制相位之 SLM 顯示,則將經 由 SLM 顯示之電腦全像片代入 2.2.1 節遠場繞射之繞射孔徑,即可求得重 建影像之光場分佈。 假設現將一 解析度之電腦全像片顯示在 SLM 上,SLM 上每單位 子畫素有效顯示區為 大小之正方形,兩畫素中心間距為 ,SLM 顯 示電腦全像片之區塊大小為 之正方形,如圖 6 所示。 圖 6 SLM 畫素分佈示意圖 為方便討論,在此將 SLM 以 方向一維表示式討論,當以一平行光入射 SLM,受 SLM 調制後之出射之光場分佈可寫成: (14) 有效顯示區 畫素間隙 D= (14)(15)式中 代表整個 SLM 顯示區塊大小, 為第 個子 畫素之位置, 為第 個畫素之複數振幅。 為畫素間隙表示式,畫素間隙是 由於相鄰的兩畫素間並非緊密連接所造成,通過畫素間隙之入射光與輸入 訊號無關,相當於受一個均勻的相位差 調制。 根據(14)式,在符合遠場繞射之距離 下,我們觀察到的繞射影像正比於 傅立葉轉換之絕對值平方,因此最後此 SLM 之遠場繞射影像為: (16)式中 為卷積運算符號,為 SLM 之空間頻率, 為 1 到 N 間之正 整數。而(16)式即為我們經由 SLM 顯示電腦全像片其遠場繞射重建影像, 首先來討論(16)式中第一個絕對值內的部份。 即為我們設計的電腦全像片之 DFT,這就是我們 設計之電腦全像片與實際光學成像之連結,由於 DFT 的特性,重建影像將 以每 N 個點為週期重複出現,重建影像相鄰兩點間距為 。 跟 之卷積即為每個點之點擴散函數,由 (15) (16)
於 函數在第一零點內的能量分佈佔整個 函數的 91%左右,因此我們 定點的邊界為 函數的第一零點,也就是 ,每個點的大小為 。 由於重建影像具有相位自由度,也就是兩個點之間有各種相對相位,而 在重疊的部份產生建設性干涉或破壞性干涉,如圖 7 所示。 (a)相鄰兩點相位相差 0°之建設性干涉 (b)相鄰兩點相位差 180°之破壞性干涉 圖 7 相鄰兩點干涉示意圖 在圖 7 中,綠色與藍色線條分別為兩相鄰點之振幅,紅色線條為相鄰兩 點干涉之振幅。相鄰兩點間之相位差有各種可能,因此在兩點之間將會造 成各種不同強度之干涉,導致重建影像之光強分佈不符合原先之預期。由 這些建設性及破壞性干涉造成之重建影像,將在本節最後模擬之。 接著考慮此週期重複的重建影像與 相乘,重建影像強度將受
到此 函數影響,由於 之第一零點位於 ,因此 第一零點內,將會看到 個點,在中心的零階繞射處將會 看到一個完整的圖形,而旁邊會有只出現半邊之一階繞射圖形。 而(16)式中第二個絕對值,是由於畫素間隙所造成,此部份對於重建影 像沒有任何貢獻,只會在重建影像時產生 DC 之光點造成誤差。 考慮以上推導的結果,若現在我們將圖 8 的二元影像(Binary Image),以 IFTA 設計成一相位電腦全像片,並以 SLM 顯示時,我們以電腦模擬其光 學重建影像如圖 9 所示。 圖 8 二元目標影像
圖 9 電腦模擬光學重建影像 由圖 9 之電腦模擬結果中發現,標示 A 的部份就是由於 SLM 畫素間隙 所造成的 DC 光點,標示 B 的部份則是建設性干涉造成之光強加強,標示 C 則是破壞性干涉造成的光強減弱。影像整體也因為 ,從中心到邊 緣強度減弱,其現象從一階繞射觀察最為明顯,一階繞射由於疊合至 之第一零點,甚至只會出現一半的影像。由於高階繞射之能量過 低不易觀察,在此只模擬至一階繞射。 從以上的推導及模擬結果,如果直接將一目標影像設計成相位電腦全像 片,並以 SLM 顯示之,則其遠場繞射重建影像將會有多階繞射、DC 光點、 函數造成影像光強分佈不均勻,以及兩相鄰點互相干涉之光強不均勻等 現象影響重建影像的品質。 A B C
2.3 目標影像及光學成像系統設計
由 2.2.2 節之推導模擬,重建影像將會有許多誤差存在,因此接著我們 希望能藉由目標影像以及光學成像系統的設計,來增進重建影像的品質。2.3.1 目標影像設計
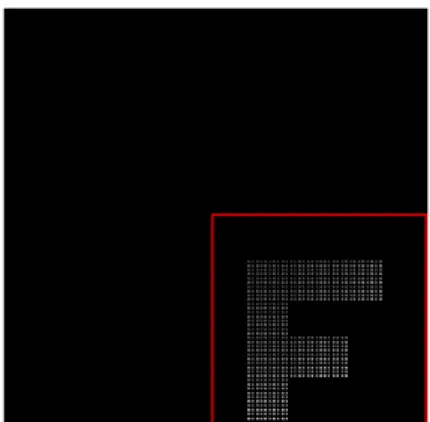
在此我們希望利用目標影像之修正設計,來避免相鄰兩點干涉、重建影 像強度不均勻以及 DC 光點之影響。 首先,為避免相鄰兩點間之干涉,我們將原始目標影像相鄰兩點間加入 一強度為零的間隔點,如此一來重建影像的相鄰兩點間距將會從 變成 。 在重建影像中,相鄰兩點之間將也會出現一強度為零的點,這樣就可以避 免具有強度的點互相干涉影響。 接著, 造成的影像不均勻,可以預先將原始目標影像對其反 向修正,將原始影像的振幅除上此 ,因此修正過的目標影像變成 中間弱而邊緣較強,在光學重建時強度正好可以與 抵銷變回均勻 分佈。 最後考慮重建影像的 DC 光點,由於 DC 是由於 SLM 之畫素間隙造成, 無法利用訊號輸入改變其分佈。較為實際的方法是直接避開 DC 光點,由於 DC 光會出現在重建影像的正中心,因此可以將目標影像偏移至角落,如此 重建影像將不會與 DC 重疊。 經由以上修正後的目標影像如圖 10 所示,紅色框內為目標影像之位置, 其他部份保持強度為 0。圖 10 修正設計之目標影像 將圖 10 設計成相位電腦全像片後,其電腦模擬光學重建影像如圖 11 所 示。 圖 11 修正影像之電腦模擬重建影像 圖 11 之電腦模擬重建影像中,綠色框內為位於零階繞射的重建影像, 紅色框內為我們想要的目標影像區域。由模擬發現,修正影像的設計,可 以避免 DC 光點與目標影像重疊,以及相鄰兩點間的干涉現象。
2.3.2 光學成像系統設計
由 2.3.1 節之修正影像設計,若是我們希望能顯示一 解析度的影像, 則經過加入間隔點以及影像偏移後,修正影像的解析度將會變成 ,因此電腦全像片也需要 的解析度。那要顯示一 解析度的影像, 則可成像的遠場繞射距離需要多遠呢? 假設現將一 解析度之電腦全像片,以畫素間距為 之 SLM 顯示 之,則電腦全像片顯示區域大小為 ,其最大繞射孔徑為 。 當入射光波長為 時,由(12)式的遠場繞射條件,可以成像的距離在: 目前一般高解析度 SLM 的畫素大小,約可達到 至 8 左右。若 以 532 波長的光源照射至畫素間距為 20 的 SLM,來顯示 解 析度之影像,則其遠場繞射距離由(17)式可知約為 。成像大小由 2.2.2 節知為 ,因此在距離投影系統 之後可成像,其成像大小約為 12m。 即使以畫素間距為8μm 之 SLM,要顯示 100×100 解析度的影像,也需 要約 ,成像大小為 。單單使用遠場繞射而成像,需要極遠的距離而 卻只能顯示不高的解析度,在實際使用上欠缺可行性。 由(17)式分析,在同樣的解析度要求下,若要降低遠場繞射距離,則必 頇減小畫素的大小,因此我們設計了一個 4f 系統來達成這個需求,其系統 架構如圖 12 所示。 圖 12 縮小電腦全像片之 4f 光學成像系統 圖 12 中 SLM 放置於第一個透鏡前 d 的距離,傅立葉透鏡一的焦距為 , 傅立葉透鏡二的焦距為 ,傅立葉透鏡一與傅立葉透鏡二共焦。 當電腦全像片以 SLM 顯示後,在第一個傅立葉透鏡的後焦平面的光場 Laser 電腦 輸入電腦全像片 SLM d 傅立葉透鏡一 傅立葉透鏡二 遠場繞射 遮罩 縮小電腦全像片 (17)
可以寫成: (18)式積分式中即為經由 SLM 顯示之電腦全像片的光學傅立葉轉換, 而積分式前的相位項,由於我們只看得到影像強度,因此對成像沒有影響。 而其成像之強度分佈與利用遠場繞射之成像相同,只有影像大小不同,在 此仍然會有 DC 光點以及多階繞射存在。 由 2.3.1 之修正影像設計,我們將目標影像設計偏移中心,所以我們在 透鏡一的後焦平面上加上一遮罩,遮罩設計只使目標影像通過,而擋住中 心之 DC 以及多階繞射。 經由遮罩過濾後之影像,再經由傅立葉透鏡二的執行一次傅立葉轉換, 在其後焦平面上之光場分佈,就等同於 SLM 上的電腦全像片經由兩次傅立 葉轉換。若 ,則在傅立葉透鏡二的後焦平面上,就可以視為一空間 中分佈之縮小電腦全像片,其縮小比例為原來的 ,其畫素縮小後,從此縮 小電腦全像片上算起之遠場繞射條件也就縮小了。 舉例來說,若 SLM 之畫素大小為 20 ,設計 時,則虛擬全像片 的畫素大小就變成 2 。則用 2.3.1 節之影像設計方式,要顯示一 100×100 解析度之影像,則只需要約 4.8 就可成像了。
2.4 電腦全像片參數分析
2.4.1 方均根誤差值
利用 IFTA 以及 SIFTA 設計相位電腦全像片,影響其重建成像品質有兩 個主要因素,第一個是運算之遞迴圈數,理論上遞迴圈數越多則重建影像 品質越佳,然而增加遞迴數將會拉長計算時間,並且其改善誤差的能力, 將會隨著遞迴數增加而降低,最終其減少之誤差將不再改進。第二個因素 (18)為相位取樣階數,相位取樣越精細則成像品質越好,但相位取樣之精密度 受到 SLM 之調制能力限制,無法無限制的增加。
為判斷遞迴圈數以及相位取樣對重建影像品質之影響,我們定義方均根 誤差值(Root Mean Square Error,簡稱 RMSE)做為評估的方法。
RMSE 定義如(19)式: 式中, (19)式中 、 代表影像之解析度為 , 為原始影像之複數振幅 分佈函數, 為重建影像複數振幅分佈函數, 為歸一化係數,定義如(20) 式,使重建影像與原始影像之能量處在相同的條件下比較。 當改變運算參數時,例如增加遞迴運算圈數或是更精密的相位取樣時, 重建影像之 RMSE 值將會下降,最終其下降趨勢將趨於收斂。為了判別其 收斂點,在此我們定義收斂判斷值 : 代表第 個 RMSE 值對第 個 RMSE 值減少量之比例,在此 我們認為 時,再增加遞迴運算或相位取樣階數,對於誤差減 小已無明顯幫助,運算在此時已達收斂,可以不需要再增加遞迴圈數或是 相位取樣階數。
2.4.2 遞迴圈數之影響
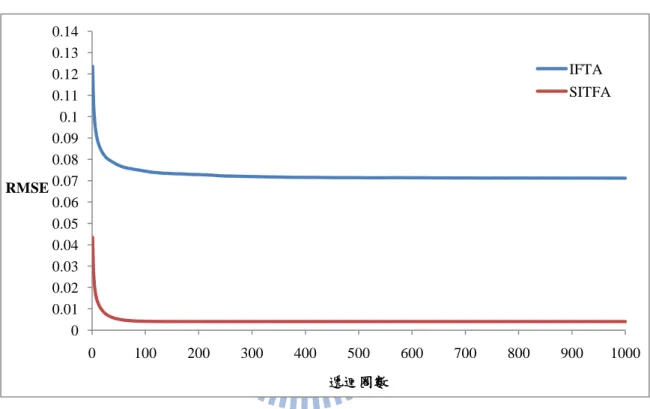
首先我們探討以 IFTA 及 SIFTA 設計電腦全像片時,在不同遞迴圈數下, 所設計之電腦全像片其重建影像成像品質。在此以圖 8 做為模擬之目標影 像,其解析度為 ,再經由影像之修正設計為圖 10 之 解析 (19) (20) (21)度影像。為避免相位取樣之影響,固定電腦全像片之相位取樣階數為 256 階,以 IFTA 及 SIFTA 分別設計遞迴圈數從 1 至 1000 之電腦全像片,並計 算重建影像之 RMSE。 由於我們最後只觀察目標影像中之四分之一部份,其餘部份將會被遮罩 擋掉,因此在計算 RMSE 時,只以我們像要的目標影像之區域為目標來計 算。遞迴圈數對應重建影像 RMSE 之結果如圖 13 所示。
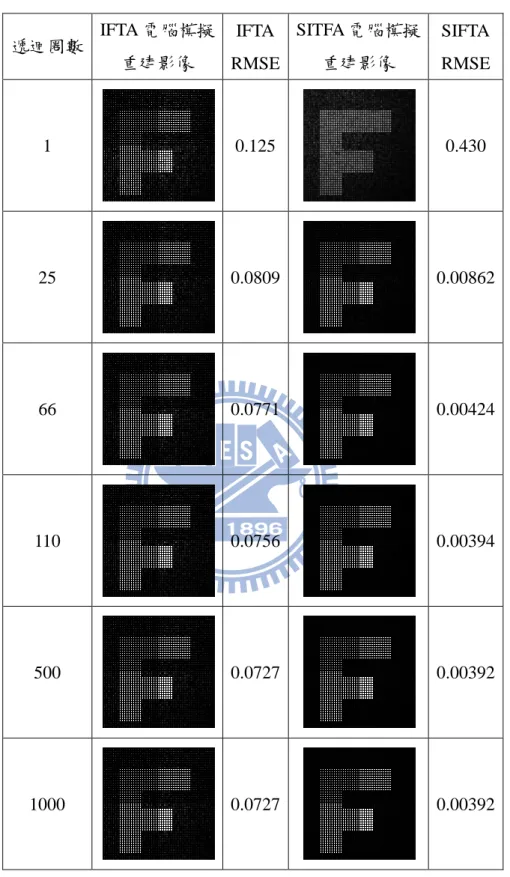
圖 13 IFTA 及 SITFA 電腦全像片其重建影像之 RMSE 對遞迴圈數關係圖 由圖 13 可看出,若此目標影像要符合(21)式的收斂條件,以 IFTA 運算 需要 66 次遞迴運算,而以 SITFA 運算則需要 110 次遞迴運算,執行超過的 遞迴運算對重建影像品質已無明顯改善。然而在同樣遞迴運算的條件下, SITFA 之重建影像 RMSE 值都比 IFTA 低,代表 SIFTA 之重建影像品質較 IFTA 佳。不同遞迴圈數時,IFTA 與 SITFA 之電腦模擬重建影像如表 1 所 示。 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.11 0.12 0.13 0.14 0 100 200 300 400 500 600 700 800 900 1000 RMSE 遞迴圈數 IFTA SITFA
表 1 IFTA 及 SITFA 設計不同迴圈數時之電腦模擬重建影像 遞迴圈數 IFTA 電腦模擬 重建影像 IFTA RMSE SITFA 電腦模擬 重建影像 SIFTA RMSE 1 0.125 0.430 25 0.0809 0.00862 66 0.0771 0.00424 110 0.0756 0.00394 500 0.0727 0.00392 1000 0.0727 0.00392
2.4.3 相位取樣之影響
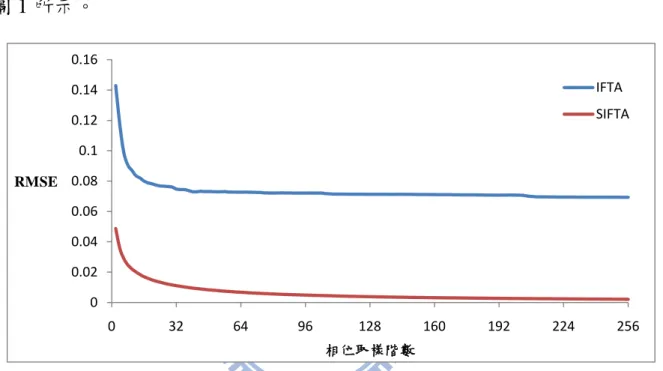
接著我們探討相位取樣階數對於重建影像品質之影響,在此我們改變相 位取樣階數,設計電腦全像片之相位取樣從 2 階(1 位元)開始,每次增加兩 階改變至 256 階(8 位元)。根據 2.4.2 節之結果,IFTA 之遞迴運算可以不需 要超過 66 圈,SITFA 不需要超過 110 圈,為求變數一致,在此 IFTA 以及 SITFA 遞迴圈數都設定為 110 圈。相位取樣階數對重建影像 RMSE 結果如 圖 1 所示。圖 14 IFTA 及 SITFA 電腦全像片其重建影像之 RMSE 對相位取樣關係圖
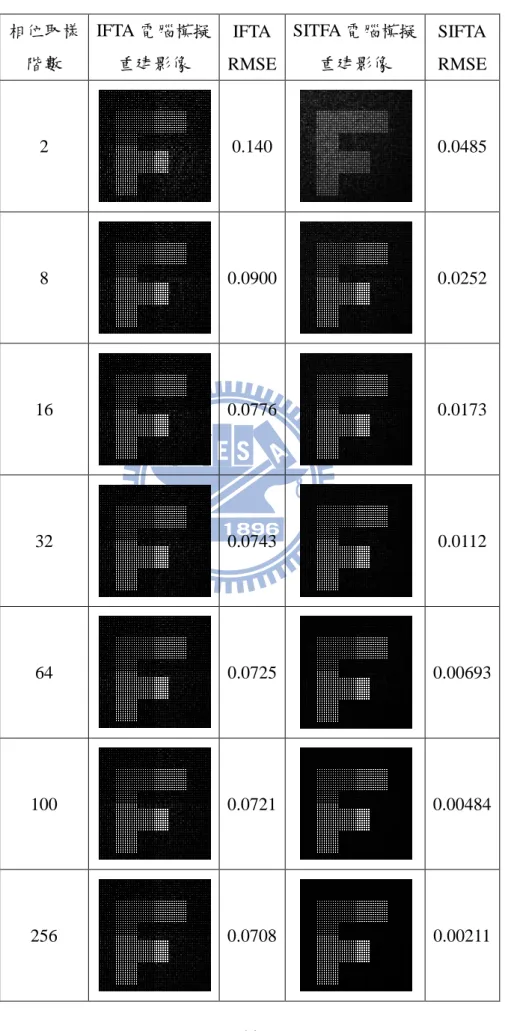
根據收斂判斷式,當 IFTA 相位取樣階數達 100 階時,SIFTA 相位取樣 階數達 105 階時,重建影像之 RMSE 已符合我們定義之收斂判斷。不同相 位取樣階數之電腦全像片,其電腦模擬重建影像如表 2 所示。 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0 32 64 96 128 160 192 224 256 RMSE 相位取樣階數 IFTA SIFTA
表 2 IFTA 及 SITFA 設計不同相位取樣時之電腦模擬重建影像 相位取樣 階數 IFTA 電腦模擬 重建影像 IFTA RMSE SITFA 電腦模擬 重建影像 SIFTA RMSE 2 0.140 0.0485 8 0.0900 0.0252 16 0.0776 0.0173 32 0.0743 0.0112 64 0.0725 0.00693 100 0.0721 0.00484 256 0.0708 0.00211
2.5 運算時間分析
以 IFTA 及 SIFTA 設計電腦全像片,大部分的計算時間花費在其遞迴運
算中,若計算時間過長將不利於即時顯示之應用。隨著科技的進展,近年 來有許多人嘗試利用圖形處理器(Graphic Processing Unit,簡稱 GPU)之平行 運算功能,做為加快計算電腦全像片之方法[16][17]。在此我們也嘗試利用 GPU 來加速運算,用以計算設計電腦全像片使用的軟體為 Matlab 2008a。 由於 Matlab 程式中並沒有可以直接使用 GPU 執行運算的功能,因此我們利 用 Terasoft 公司設計之 Matlab 套件軟體 Jacket,使我們可以利用 GPU 執行 Matlab 之程式運算。實驗室使用的電腦配備如表 3 所示:
表 3 實驗室電腦配備
處理器 AMD Athlon(tm) II X2 245 Processor
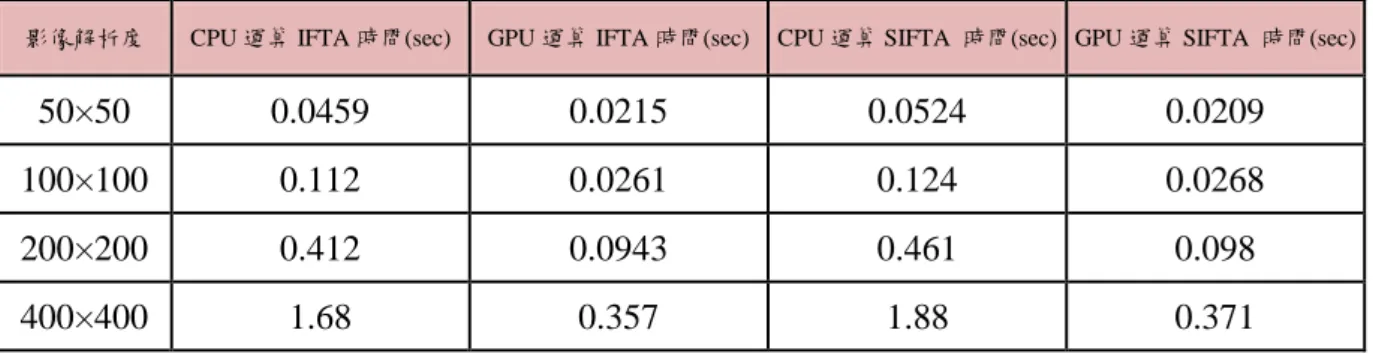
記憶體 3GB 主機板 MSIMS-7615 圖形處理器 NVIDIA Quadro FX1800 在此分別比較使用 CPU 運算以及利用 GPU 運算時所花費的時間,實驗 之目標影像,是將圖 8 之影像改變解析度,設計解析度為 50×50、100×100、 200×200、400×400 等 4 種不同解析度之影像,並根據 2.3.1 節之方法修正設 計後,來執行 IFTA 以及 SITFTA 運算。IFTA 及 SIFTA 運算之遞迴圈數皆 為 100 圈,相位取樣皆為 128 階,每張影像重複執行 10 次運算並取平均。 運算結果如表 4 所示。
表 4 以 IFTA 及 SIFTA 設計不同解析度電腦全像片之運算時間
影像解析度 CPU 運算 IFTA 時間(sec) GPU 運算 IFTA 時間(sec) CPU 運算 SIFTA 時間(sec) GPU 運算 SIFTA 時間(sec)
50×50 0.0459 0.0215 0.0524 0.0209 100×100 0.112 0.0261 0.124 0.0268 200×200 0.412 0.0943 0.461 0.098 400×400 1.68 0.357 1.88 0.371
實際執行運算結果,計算 IFTA 及 SIFTA 之時間相差不多,而利用 GPU 加速運算則可以增加 2 至 5 倍運算速度。由於人眼的反應時間約為 0.033 秒, 由表 2 中我們發現,當以 GPU 加速運算時,以每秒 30 幀畫面之速度讀取 並計算一 100×100 解析度之電腦全像片是可行的。
第三章 矽基液晶顯示器相位調製特性量測
本章將介紹矽基液晶顯示器(Liquid Crystal on Silicon ,簡稱 LCOS)之結 構,以及其相位調制原理。接著我們設計雙狹縫干涉實驗,來量測 LCOS 之相位調制性質,並且找到一個適合純相位調制的使用條件。
3.1 LCOS 顯示器簡介
我們實驗中使用 HOLOEYE 公司生產,型號為 LC-R 2500 之 LCOS,來 做為顯示相位電腦全像片之 SLM。LCOS 為一種液晶與 CMOS 製程結合之 反射式液晶空間光調制器,其結構如圖 15 所示。 圖 15 LCOS 結構示意圖 LCOS 之製造,是在矽基板上利用半導體製程技術製作 CMOS 做為控制 電路,在其鍍上金屬反射層後,於透明電極與反射層中填充間隙材料後, 再灌入液晶後封裝製成。 LCOS 與一般穿透式液晶空間光調制器之差別,在於控制訊號之 CMOS 電路隱藏在反射層下,可以增加液晶之開口率進以提高出光效率。一般穿 透式 LC 之開口率約為 75%,在此我們使用的 LC-R2500 可以達到高於 93% 之開口率,其規格數據如表 5 所示。 反射光 入射光 玻璃 透明電極 液晶層 反射層 CMOS 控制電路 矽基板表 5 HOLOEYE LC-R2500 規格表(HOLOEYE 公司提供)
由表 5 資料,LC-R2500 之液晶為 45°扭轉相列型液晶,液晶分子 c 軸之 軸向從上基板至下基板扭轉 45°,如圖 16 所示。根據偏振光之波導現象 (Adiabatic Following ),當 LCOS 未施加電壓時,一偏振方向平行於液晶光 軸之光由上基板入射 LCOS 後,其偏振態將會順著液晶分子光軸之扭轉角 度而偏轉,到達下基板時,其偏振方向將與入射時夾 45°。再經由反射層反 射後,反射光之偏振方向將會再往原方向 45 度偏轉,最終出射光之偏振方 向將與入射光平行。 圖 16 45°扭轉液晶盒示意圖 下基板 上基板 液晶光軸 液晶光軸 45° 0°
由於入射光在液晶盒中之行進路徑,等同於經過一層 45°扭轉液晶後, 再經過一層鏡面對稱之-45°扭轉液晶。因此我們也可將 LCOS 視作為一中心 為鏡面對稱,前後放置偏振片與檢偏片的穿透式液晶,如圖 17 所示。 圖 17 將 LCOS 視作一穿透式液晶盒結構示意圖 一般而言,LCOS 上並沒有附加偏振片以及檢偏片,通常是利用一分光 鏡將光垂直入射 LCOS 後再垂直反射,並在分光鏡前後加上偏振片及檢偏 片,藉由控制偏振片與檢偏片之角度,來達到相位或是振幅調制之功能。
3.2 LCOS 相位調制特性量測
我們實驗中需要利用 LCOS 來顯示相位電腦全像片,因此我們希望找到 一個偏振片與檢偏片之角度,使我們在輸入不同電壓時,可以符合兩個條 件:1. 畫素出射光之相位不同。2. 通過檢偏片之出射光振幅要相同。 理論上只需要知道 LCOS 之參數,例如液晶預傾角、液晶層厚度 及 以 及輸入灰階訊號對應之電壓等……條件,即可計算 LCOS 之灰階輸入對應 之相位調變量。但是製造公司並沒有提供許多參數,因此最實際的方法, 仍然是以實驗測量輸入灰階對應相位及振幅調變量。 檢偏片光軸 ψ 液晶光軸 液晶光軸 液晶光軸 偏振片光軸 θ 45° 0° 0°在此我們設計雙狹縫干涉實驗,來量測 LCOS 相位調制特性。執行雙狹 縫干涉實驗,是製作一雙狹縫,並將其放置於 LCOS 前,改變 LCOS 上輸 入影像,將 LCOS 上通過一邊狹縫之影像灰階值固定為 0,而通過 LCOS 另一邊狹縫之灰階值則從 0 改變至 255,藉由干涉條紋之亮暗紋位移,即可 計算輸入不同灰階時其相位調制量,實驗架構如圖 18、圖 19 所示。 圖 18 LCOS 雙狹縫實驗架構圖 圖 19 LCOS 之不同灰階對應雙狹縫示意圖 改變輸入灰階 保持輸入灰階=0 雙狹縫 LCOS 空間濾波器 半波版 透鏡 光圈 分光鏡 偏振片 雙狹縫 LCOS 電腦 輸入電壓控制灰階 CCD Nd:YVO4 Laser
當輸入不同灰階時,兩個狹縫間之相對相位將會改變,假設狹縫寬為 , 兩狹縫距離為 ,則通過此雙狹縫之光場分佈可寫成: (22) 在此只討論一維方向之繞射,式中 代表通過左邊狹縫之光場比通過 右邊狹縫之光場多了一個 之相位差。當繞射距離符合(12)式之遠場繞射條 件時,此雙狹縫干涉圖形可以用(13)式計算得之,觀察到的干涉條紋寫成: (23) 式中 , 為觀察平面之座標, 為觀察平面與雙狹縫之距離, 為 入射光波長。 最後可以將(23)式整理後可得: (24) 而我們利用光偵測器所觀測到的影像強度,正比於振幅絕對值平方: (25) 在(25)式中,其極大值(亮紋)或極小值(暗紋)之位置,與相位差 成線性 之關係。設干涉條紋之週期為 ,當通過兩狹縫之光場有一 之相位差時, 其亮紋或暗紋相對於無相位差時之位移 之關係: 由(26)式我們就可以從 CCD 上亮暗紋條紋的相對位移,來判斷輸 入不同灰階時 LCOS 之相位調制量。一個干涉條紋週期位移的例子如 圖 20 所示。 (26)
圖 20 雙狹縫實驗條紋位移示意圖
3.3 LCOS 相位及振幅調制實驗測量結果
我們根據 3.2 節之設計,架設了一雙狹縫干涉實驗來量測 LCOS 之相位 調制特性。實驗中雙狹縫之狹縫寬度為100μm,狹縫間距為 1mm。雙狹縫 距離 CCD 之距離為 1.2 公尺。所使用之 CCD 之解析度為 640×480,感光區 域大小約為 4mm×5mm。由(25)式我們可以推估其條紋週期約為 1.6mm,在 CCD 上可以約可以看到 4 條亮紋,實際能分析之最小相位差約為2 160。實驗 儀器如圖 21、圖 22 所示。 圖 21 雙狹縫 x 暗紋位移 光強度 間距圖 22 CCD
在此實驗架構下,我們將 CCD 感光區域直接放置於雙狹縫干涉圖形上 來擷取圖像,如圖 23 所示。當輸入不同灰階值時,CCD 上擷取到圖樣後, 在水平方向取樣,即可畫出繞射圖形之亮暗紋位置,如圖 24、圖 25 所示。
(a)CCD 擷取之影像
(b)水平取樣結果
圖 24 輸入相對灰階為 0 時,CCD 擷取之干涉圖形及水平方向取樣圖形 歸一化強度
(a) CCD 擷取之影像 (b) 水平取樣結果 圖 25 輸入相對灰階為 128 時,CCD 擷取之干涉圖形及水平方向取樣圖形 由於擷取之影像時之雜訊干擾,必頇將圖形再經由一低通濾波處理來去 除雜訊,才能得到較平滑的曲線,最後就可以在此曲線上找到極大值(亮紋) 或極小值(暗紋),如圖 26 所示。 Pixel 歸一化強度
圖 26 低通濾波處理後,輸入相對灰階為 0 與 128 之干涉條紋位移 圖 26 中藍線為輸入灰階為 0 之干涉條紋,紅線為輸入灰階為 128 之干 涉條紋。最後我們選定入射光之偏振方向為與 y 軸順時鐘夾 80°,檢偏片之 光軸與 y 軸夾 60°時,則其振幅調制量較為均勻,並且可以調制 0 至 2 的 相位。以此偏振角度進行實驗,輸入不同灰階時,取得調制之振幅及相位 量,輸入灰階對應相位及振幅調制結果如圖 27 所示。 圖 27 輸入灰階對應相位及振幅調制圖 實驗測量結果,振幅調制在輸入灰階 64 至 160 之間最為均一,相位調 制則是從輸入灰階從 0 至 148 之間較為線性,整體而言仍然能達到調制相 位達2 之功能。 0 0.2 0.4 0.6 0.8 1 1.2 0 1 2 3 4 5 6 7 0 32 64 96 128 160 192 224 256 歸一化振幅 相位(rad) 灰階 相位 振幅 歸一化強度 Pixel 灰階=0 灰階=128
第四章 LCOS 光學重建電腦全像片實驗結果
本章中我們架設光學成像系統,來重建我們設計的相位電腦全像片。首 先我們將介紹實驗架構,我們觀察到 LCOS 表面不平整造成之重建影像誤 差,並以電腦模擬驗證之。接著藉由改變電腦全像片之解析度,觀察遠場 繞射條件限制。最後比較 IFTA 與 SIFTA 之成像品質、灰階影像成像結果以 及繞射效率。4.1 光學實驗架構
4.1.1 成像系統 我們架設一光學成像系統如圖 28 所示。 圖 28 光學成像系統 實驗中使用的雷射為 532nm 之半導體雷射幫泵之固態雷射,根據第三 章之結果,設計通過半波板之出射光其偏振方向與 y 軸夾 80°,偏振片與 y 軸夾 60°,y 軸定義與光學桌垂直。使用的傅立葉透鏡,其焦距分別為 , ,因此傅立葉透鏡一與透鏡二之距離為 96 ,焦 半波版 透鏡 檢偏片 電腦 輸入電腦全像片 投影屏幕 Nd:YVO4 光圈 分光鏡 LCOS 空間濾波器 Laser 遠場繞射距離 傅立葉透鏡一 傅立葉透鏡二 成像一 縮小電腦全像片 遮罩距比 。 首先為確定成像一之位置,我們以圖 29 做為測試用的目標影像,其解 析度為200 200,並以 IFTA 設計其電腦全像片。 圖 29 測試用目標影像 由(18)式預估,在傅立葉透鏡後一焦平面上,也就是在其後 84 處, 我們將可以觀察到電腦全像片之重建影像。然而實際上在後焦平面上之成 像卻不甚清晰,最清晰的影像約成像於透鏡後約 80 處。我們將透鏡一換 成 38 焦距之透鏡,並以 CCD 擷取影像,發現最清晰之成像仍然位於焦 平面前,約在透鏡後 37 處。CCD 放置於 38 焦距透鏡後 37 以及 38 處擷取之影像如圖 30 所示。 (a)透鏡後 37cm 擷取影像 (b)透鏡後 38cm 擷取影像 圖 30 不同位置擷取之影像 在我們的系統當中,應該有某個誤差導致了這個結果。在前人的參考文
獻[18][19]中,他們觀察到 LC-R 2500 其表面並非光學平整,而是呈現一具 有弧度之曲面。因此我們設計了麥克森干涉實驗,觀察我們所使用的 LCOS 是否也具有相同之狀況。麥克森干涉實驗如圖 31 所示。 圖 31 麥克森干涉實驗架構圖 首先我們將 LCOS 電源關閉,其麥克森干涉結果如圖 32 所示。 圖 32 LCOS 與平面鏡之麥克森干涉圖形 由圖 32 之結果顯示,在未施加電壓時,實驗中使用的 LCOS 表面呈現 一曲面之不平整。圖中在箭頭方向上共可以看到大約 4 至 5 圈的暗紋。光 由反射面反射時,曲面變化會使得光走了兩倍的距離,如圖 33 所示,因此 LCOS 之曲面變化約有 2 至 2.5 個波長,也就是約 1 至 1.3 左右,一般 而言我們所謂的光學平整其平面之變化要小於 ,此 LCOS 表面已經不符 合光學平整之條件 。
(a)击面 (b)凹面 圖 33 反射面光程差示意圖 然而無論是击面或凹面,其都會造成環狀的干涉條紋,因此並無法由 32 圖來判斷 LCOS 之表面,究竟是一击出或是凹陷的曲面。在此我們利用 LCOS 輸入不同灰階時,其條紋位移方向來判別。 首先假設此曲面為击出之球面,當我們以一平行光入射,則從其中心 向右水平取樣之反射光可以寫成: (27) 接著此反射光與平面之麥克森干涉可以寫成: (28) 而當 LCOS 輸入灰階訊號時,根據第三章之結果,反射光將多出一相位 延遲,輸入灰階後之麥克森干涉寫成: (29)
最後看到的條紋分佈為(29)式之絕對值平方。 (30) 同理,若曲面為凹陷的球面,則其麥克森干涉條紋分佈寫成: (31) 由於 為一固定之相位差,可以視為常數看待。從(30)式中可以知道, 當多出之相位差 大於零時,击面反射的干涉條紋將會向中心移動。同樣的, 對於凹面反射而言,多出一大於零的相位差 則會使干涉條紋向外移動。 根據以上結果,我們輸入整面之灰階訊號,使 LCOS 反射之光場有一 相位延遲,其麥克森干涉實驗結果如圖 34 所示。 (a)輸入灰階為 0 時 (b)輸入灰階為 100 時 (c)輸入灰階為 150 時 圖 344 輸入不同灰階時,麥克森干涉圖形
由圖 37 之結果發現,隨著輸入灰階增加,其干涉圖形暗紋向內移動, 如紅色箭頭標示,因此我們可以判斷 LCOS 表面應該為一击面。
4.1.2 表面不平整現象之電腦模擬
然而此不平整現象是否就是造成成像誤差之原因?因此接著我們模擬 LCOS 上不平整效應造成之相位差,並加在我們設計的電腦全像片上,如圖 35 所示。 圖 35 不平整相位差之模擬 與電腦全像片之表示方式類似,圖 35 中灰階為 0 之黑色就代表相位為 0,灰階為 1 之白色就代表相位為 ,其餘灰階值依此類推。將此灰階分佈 乘上 並取自然指數後,就變成此击面之相位分佈。接著將相位分佈乘上 電腦全像片後,就可以得到經此击面相位分佈後的電腦全像片。其電腦模 擬重建影像如圖 36 所示。 圖 36 電腦模擬 LCOS 表面不平整之重建影像圖 36 之電腦模擬與圖 30(b)之實驗結果類似,因此我們推斷 LCOS 表 面不平整就是造成成像位置偏移之原因。由於清晰的成像稍微向前移動, 因此傅立葉透鏡二之位置,也將會稍微往前移動以符合此清晰影像之位 置。
4.2 光學成像實驗
4.2.1 遠場繞射成像實驗
由 4.1 節之討論,在傅立葉透鏡二後約 才能得到一個清楚成像,因 此傅立葉透鏡二之後焦平之電腦全像片,約縮小為原來的 倍,畫 素大小縮小為約 。受限於實驗室空間,縮小之電腦全 像片至投影屏幕距離最遠為 。因此在投影屏幕上,我們預估看到零階 繞射之影像大小為 。由(12)式知,在遠場繞射條件 限制下,我們最多能顯示約 解析度的電腦全像片。 首先我們以圖 37 之兩個二元影像做為目標影像,在此先不做畫素間隔 以及避開 DC 之影像處理,兩張影像之解析度皆為 。以 IFTA 設 計其電腦全像片,相位取樣皆為 128 階,遞迴圈數皆為 150 圈。 (a)交大校徽 (b)中文字”光” 圖 37 未修正設計之目標影像 不加遮罩時之重建影像如圖 38 所示。(a)圖 37(a)之光學重建影像 (b)圖 37(b)之光學重建影像 圖 38 IFTA 光學重建影像 由於相機正對影像拍攝時,將會遮蓋到投影的影像,因此拍攝時相機會 從旁邊稍微傾斜一個角度拍照,實驗照片會看起來有點歪斜。圖 38 之零階 繞射影像大小,皆約為 ,影像中心有明顯之一 DC 光點,旁邊有多 階繞射影像,與我們預測的結果符合。接著我們將鏡頭拉近,觀察局部放 大影像,如圖 39 所示。
(a)圖 38(a)局部放大圖 (b)圖 38(b)局部放大圖 圖 39 未修正設計重建影像之局部放大圖 從圖 39 中可以發現,重建影像中有許多密佈的暗紋,這些就是兩點間 互相破壞性干涉造成之結果,這與我們在 2.2.2 節之電腦模擬結果符合。
4.2.2 遠場繞射實驗
接著我們想要知道,是否一定要符合遠場繞射才能得到良好成像,根據 (17)式,真正顯示的影像解析度為電腦全像片之四分之一。而在 4.2.1 節之 系統架構中,電腦全像片最大解析度為160 160,因此能顯示之最大影像 也解析度為40 40。 由於影像實際解析度不高,在此使用輪廓變化較為簡單的英文字母 F 做 為目標影像,如圖 40 所示。圖 40 目標影像“F” 接著我們以 IFTA 將其設計為電腦全像片,目標影像為將圖 40 改變解析 度,解析度共有40 40,60 60,80 80,100 100,150 150等五個不 同解析度。經由 2.3.1 節之修正設計後,其電腦全像片解析度為,160 160, 240 240,320 320,400 400,600 600。實驗中放置遮罩以去除 DC 以及多階繞射影像,其光學重建結果如圖 41 所示。 (a)解析度40 40 (b) 解析度60 60
(c) 解析度80 80 (d) 解析度100 100 (e) 解析度150 150 圖 41 不同解析度之“F”字樣重建影像 由圖 41 之重建影像中發現,解析度為100 100及150 150之影像,其 相鄰畫素之間已經出現互相干涉的現象。接著我們放大影像,放大觀察其 局部影像,如圖 42 所示。
(a)解析度40 40 (b)解析度60 60
(c)解析度80 80 (d)解析度 0 0
(e)解析度 0 0
從圖 42 中發現,80 80解析度之影像,其相鄰畫素之間仍有干涉現象, 但是已經不太明顯。雖然根據遠場繞射條件限制,能顯示之影像只有40 40, 然而實際上即使稍微超過其限制,我們仍然能觀察到成像。
4.2.3 二元影像之光學成像
為方便討論,4.2.1 及 4.2.2 節之電腦全像片是以 IFTA 設計,接著我們 要比較使用 IFTA 以及 SIFTA 設計之電腦全像片,其光學重建影像之差別。 由 2.4 節之電腦模擬,對一個二元影像而言,IFTA 在強度為 0 之部份雜訊 較 SIFTA 多。在此我們以圖 43 等三張圖做為目標影像,影像之實際解析度 為50 50。 (a)中文字“交” (b)中文字“大” (c)中文字“電” 圖 43 二元影像實驗目標影像我們分別以 IFTA 及 SIFTA 設計圖 43 之電腦全像片,由於 LCOS 之相 位調制可達 256 階,因此三張電腦全像片之相位取樣都設定為 256 階。由 2.4 節之收斂判斷,利用 IFTA 計算,此三張影像分別需要 110、108、115 個遞迴圈數。而以 SITFA 則分別需要 120、115、134 圈。因此設計電腦全 像片時,其相位取樣皆為 256 階,遞迴圈數則以以上之圈數。其光學重建 影像如圖 44、圖 45 所示。
(a)“交”之重建影像 (b)“大”之重建影像
(c)“電”之重建影像
(a)“交”之重建影像 (b)“大”之重建影像 (c)“電”之重建影像 圖 45 SIFTA 之電腦重建影像 由圖 45 之 IFTA 及 SIFTA 光學重建影像結果發現,對二元影像而言, IFTA 之重建影像在強度為零的地方仍有許多雜訊,而 SIFTA 在強度為零的 地方雜訊則較低。
4.2.4 灰階影像之光學成像
接著我們想要知道,IFTA 及 SIFTA 對於灰階影像之重建效果。我們設 計一具有四階強度之灰階影像,如圖 46 所示。圖 46 四階之灰階測試影像 由左至右之灰階分別為0、1 3、 2 3、1,也代表了目標影像之能量比。我們 將圖 46 分別以 IFTA 及 SIFTA 設計之電腦全像片並重建之,其光學重建影 像如圖 47 所示。 (a)IFTA 灰階重建影像 (b)SIFTA 灰階重建影像 圖 47 四階灰階重建影像 圖 47 中,IFTA 之光學重建影像,即使相同灰階之部份仍然看得出強度 分佈不均勻,而 SITFA 之強度分佈則較為一致。接著我們使用光功率計量 測其能量,每一個灰階部份由上而下各取 10 個點平均,其結果如表 6 所示。
表 6 IFTA 與 SIFTA 設計灰階影像之重建影像平均能量分佈 灰階值 IFTA 能量比 SIFTA 能量比 0.138 0.0185 0.405 0.343 0.781 0.704 1 1 從表 6 之結果中,使用 IFTA 設計之重建影像,其強度大於零之灰階值 能量比為 0.405:0.781:1。而利用 SIFTA 設計之重建影像,能量比為 0.0185:0.343:1。而灰階值為零之部份,IFTA 明顯有較多雜訊產生。 從圖 47 及表 6 之結果發現,IFTA 之重建影像強度分佈較不均勻,並且 在灰階為零的地方仍然有許多雜訊,在灰階的重建上比例偏差也較多。而 SIFTA 重建影像對於灰階之重建比例較為正確,在灰階為零之處的雜訊也 較低。
由於 SIFTA 之成像品質明顯較 IFTA 佳,接著我們試著以 SIFTA 設計不
同之灰階圖片之電腦全像片,目標圖片如圖 48 所示,解析度為50 50,其 灰階取樣皆為 8 階。 (a)卡通人物哆啦 A 夢 (b)田家柄光電大樓 圖 48 灰階目標影像 光學重建影像如圖 49 所示。
(a)哆啦 A 夢 (b)田家柄光電大樓 圖 49 灰階之光學重建影像
4.2.5 繞射效率分析
最後,我們想探討此系統之繞射效率,繞射效率定義為重建影像之光強 總和除上入射光之比例。 E o i 式中 o為零階之重建影像光強總和, i為入射 LCOS 之光強。 在我們的光學系統中,由於 LCOS 反射率只有 75%,從 LCOS 出射之 光將只有入射光的 75%。接著反射光經由分光鏡改變出射方向,將損失 50% 能量。通過檢偏片時,經由實際測量,平均將會損失 30%能量。最後重建 影像中,零階繞射影像只佔全部重建影像之 91%。DC 光點為畫素間隙造成, LCOS 之填充因子(Fill Factor)為 91%,經過濾除濾除 DC 後能量將再乘上 91%。最後,由於影像設計之關係,只有零階繞射中之 1/4 部份為目標影像, 其餘部份佔據之能量依據不同編碼法以及不同圖片,各佔不等之能量比例。 因此最後重建影像之能量可以寫成。 o i 75 50 70 91 91 0 2174 i 式中 為圖片經由不同編碼法設計後,佔零階繞射之能量比例。 IFTA 以及 SIFTA 之理論之繞射效率,以及光學重建影像之繞射效率, 如表 7、表 8 所示。 (32) (33)表 7 IFTA 重建影像之理論及實驗繞射效率 目標影像 A 理論繞射效率 光學繞射效率 0.955 0.208 0.183 0.940 0.204 0.180 0.948 0.206 0.175 0.949 0.206 0.181 表 8 SIFTA 重建影像之理論及實驗繞射效率 目標影像 A 理論繞射效率 光學繞射效率 0.819 0.178 0.156 0.845 0.184 0.157 0.847 0.184 0.164 0.840 0.183 0.159 由表 7 及表 8 之實驗結果可以發現,SIFTA 之繞射效率都比 IFTA 低, 這是因為 SIFTA 沒有限制雜訊區之振幅,因此實際貢獻給目標影像的能量 較少。然而實際之繞射光強 SIFTA 約為 IFTA 之 85%左右,直接觀察影像 時並不容易分別出來,因此其差別並不明顯。
4.3 實驗結果討論
根據實驗結果,在此將要探討系統中之參數:設計全像片之演算法、遠 場繞射成像限制、影像解析度、灰階表現、光學效率以及全彩影像。(1)演算法:在實驗中我們分別光學重建 IFTA 及 SIFTA 之影像,由於空間 光調制器的特性,我們只能使用重建影像的部份區塊做為目標影像。在此 情況下 SIFTA 的編碼方式就可以利用其他不顯示的區塊做為校正目標影像 使用,雖然繞射效率較 IFTA 稍低,然而在雜訊比例以及灰階影像重建,其 表現都比 IFTA 還要好。而從 2.5 節之運算時間分析,IFTA 與 SIFTA 之運 算時間差距不多,從實驗結果發現,在我們的投影系統中,SIFTA 是比 IFTA 還要適用的演算法,在後面的討論中,我們就只針對 SIFTA 的重建結果分 析。 (2)光學繞射系統:由於直接遠場繞射成像其限制過遠,因此我們利用一 4f 系統縮小全像片,使我們可以在較短距離即可利用遠場繞射成像。遠場繞 射限制與繞射孔徑大小成平方比,在我們的系統中,遠場繞射之距離可以 減少為原先之 1/64,並可在距離繞射系統後 1.5m 處重建解析度50 50,大 小為 27cm 之影像。然而50 50解析度對於一投影顯示系統仍嫌太低,若要 投影更高解析度之影像,則必頇加大投影距離,或是使用更高解析度的 SLM, 以及使用焦距比例更大的透鏡等方法。 (3)灰階影像顯示:由 4.2.4 節之實驗結果,SIFTA 重建影像能量比例與目標 影像之灰階相符,因此重建灰階影像是有機會實現的。 (4)光學效率:在通過許多元件後,繞射效率約低於兩成,扣除元件本身之 反射率以及多階繞射和零階,有一半的能量被分光鏡分開,而有部份的光 強則是被檢偏片擋住。因此若是能去除分光鏡及檢偏片,則繞射效率可以 增加兩倍以上,在前人研究中有人設計入射光與 LCOS 夾一角度[20],並且 也可以達到良好之相位調變,因此若是能使用此架構,則可避免繞射光延 原路反射,並且可不需要分光鏡,以提高繞射效率。 然而,由於不同的影像設計的電腦全像片,其重建影像繞射效率都不相 同。而使用繞射成像,所有入射的光都對重建影像有貢獻,因此若是入射 光之強度固定時,不同的重建影像亮度將會有所變動。舉例來說,假設現 有兩個影像,其中影像一共有 50 個強度單位為 1 的點,其繞射效率為 20%。 影像二有 200 個強度為 1 的點,繞射效率為 15%。當入射光能量為 100 時, 影像一之重建影像中,每一個強度為一的點之平均光強為 0.4 。影 像二之重建影像每點之平均強度則為 0.075 。因此相同灰階的值,
在不同的目標圖片下都有可能顯示不同的強度,這對觀賞影像而言將是一 個不舒服的感受。 但是若是能控制入射光的能量,則此特性反而對於節能有所幫助。我們 只要能先計算重建影像之單位畫素能量,則若單位畫素能量高時,降低入 射光能量,而單位畫素能量低時則加強入射光能量。藉由動態的入射光強 調變,就可以不需要保持較高的入射光能量輸入,進而達到節能的效果。 在我們實驗中之雷射光源無法達到此動態調變的目標,然而這是一個值得 嘗試的方法。 (5)全彩影像:由於成像大小與波長有關,波長越長則重建影像越大,因此 若是使用同一個規格的 SLM,則不同顏色的影像其成像大小將會不同。有 可能的解決方法有兩種,第一種是使用三種不同規格的 SLM,使其畫素大 小正好與使用波長成反比。第二種方法則是設計不同的 4f 系統,使三種不 同波長之電腦全像片縮小,其比例與波長成反比。
第五章 結論
本篇論文探討利用電腦全像片,來達成遠場繞射成像投影顯示系統之研 究。我們比較了一般投影顯示系統與電腦全像投影顯示系統的差別,並分 析電腦全像投影系統的適用場合。 為設計良好品質之電腦全像片,我們使用 IFTA 以及 SIFTA 設計電腦全 像片。接著針對 SLM 之光學成像特性,分析重建影像的特性,並根據其結 果設計目標影像以及光學成像系統,以避免重建影像中之誤差干擾。由電 腦模擬結果顯示,在我們的光學成像系統中,SIFTA 之重建影像品質比 IFTA 佳。接著我們試著利用 GPU 之平行處理運算功能來加速運算,由於人眼反 應時間約為 0.033 秒,經由 GPU 加速運算後,無論是 IFTA 或 SIFTA 在我們的系統當中都可以及時處理並顯示最多100 100解析度的影像。 為了使用 SLM 實現動態顯示電腦全像片,我們量測了 LC-R 2500 矽基 液晶顯示器之特性,希望能找到一適當的工作模式。實驗量測結果,當入 射光之偏振方向與 y 軸夾 80°,檢偏片與 y 軸夾 60°時,LC-R 2500 可以調 制 0 至 2 之相位達至少 160 階,而其振幅調變則可以保持在 0.8 至 1.1 之 內。 最後我們架設一光學系統,並將設計好的電腦全像片以 LCOS 顯示。由 於 LC-R 2500 表面不平整現象,光學系統中對其稍微調整,以達到良好成 像之結果。而受限於實驗室空間,成像屏幕與投影系統之距離為 1.5m,在 此條件下,我們的成像系統可以投影一50 50解析度,大小約 27cm的影像。 經由實驗觀察,SIFTA 之重建影像其均勻度與雜訊比例都較 IFTA 佳,在灰 階影像的顯示中,SIFTA 之灰階能量比例也與目標影像相近。在我們的系 統當中,使用 SIFTA 比 IFTA 更適合設計電腦全像片。 在我們的系統中,若是要呈現更高解析度的影像,或是減小遠場繞射距 離,則必頇使用更高解析度的 SLM 或是改變傅立葉透鏡之焦距比例。為維 持重建影像的能量均一性,未來可以利用動態光強調變達成此目標。
參考文獻
[1] D. Gabor. “A new microscopic principle”, Nature, 161, pp. 777-778, May 1948.
[2] B. R. Brown, A. W. Lohmann. “Complex spatial filtering with binary masks”, Applied Optics, 5, 6, pp. 967-969, June 1966.
[3] Toyohiko Yatagai, ”Stereoscopic approach to 3-D display using computer generated holograms”, Applied Optics,15, 11, pp. 2722-2729, November 1976.
[4] Detlef Leseberg. “Computer-generated three-dimensional image holograms”, Applied Optics, 31, 2, pp. 223-229, January 1992.
[5] Detlef Leseberg, Christian Frere. “Computer-generated holograms of 3-D objects composed of tilted planar segments”, Applied Optics, 27, 14, pp. 3020-3024, July 1988.
[6] Youzhi Li, David bookasis, Joseph Rose. “Computer-generated holograms of three-dimensional realistic objects recorded without wave interference”, Applied Optics, 40, 17, pp. 2864-2870, June 2001.
[7] M. Reicherter, T. Haist, E. U. Wagemann, H. J. Tiziani. “Optical particle trapping with computer-generated holograms written on a liquid-crystal display”, Optics Letters, 24, 9, pp. 608-610, May 1999.
[8] 劉仁崇,「相位電腦全像片的設計與應用」,國立交通大學,碩士論文, 民國93年。
[9] Yong-Ying Wang, Yu-Rong Wang, Yong Wang, Hui-Juan Li, Wen-Jia Sun, “Optical image encryption based on binary Fourier transform computer generated hologram and pixel scrambling technology”, Optics and Lasers in Engineering, 45, pp. 761-765, 2007.
[10] Thomas Dresel, Mathias Beyerlein, Johannes Schwider, “Design of computer-generated beam-shaping holograms by iterative finite-element mesh adaption”, Applied Optics, 35, 35, pp. 6868-6874, December 1996. [11] 遲澤英,陳文建,應用光學與光學設計基礎,一版,東南大學出版社,
[12] L. B. Lesem, P. M. Hirsch, J. . Jordan, Jr. “The Kinoform: A New Wavefront Reconstruction Device”, IBM Journal of Research and Development, 13, 2, pp.150-155, 1969.
[13] R. W. Gerchberg, W. O. Saxton, “A practical algorithm for the
determination of the phase from image and diffraction plane pictures”, Optik, 35, 2, 237-246, 1972.
[14] Frank Wyrowski, Olof Bryngdahl. “ terative Fourier-transform algorithm applied to computer holography”, J. Opt. Soc. Am. A, 5, 7, pp. 1058-1065, July 1988.
[15] J.S. Liu, .J. Caley, M.R. Taghizadeh, “Symmetrical iterative
Fourier-transform algorithm using both and amplitude freedoms”, Optics Communications, 267, pp. 347-355, 2006.
[16] Nobuyuki Masuda, Tomoyoshi Ito, Takashi Tanaka, Atsushi Shiraki, Takashige Sugie. “Computer generated holography using a graphics processing unit”, Optics Express, 14, 2, pp. 603-608, January 2006. [17] Lukas Ahrenberg, Philip Benzie, Marcus Magnor, JohnWatson.
“Computer generated holography using parallel commodity graphics hardware”, Optics Express, 14, 17, pp. 7636-7641, August 2006. [18] Kurt D.Wulff, Daniel G. Cole, Robert L. Clark, Roberto DiLeonardo,
Jonathan Leach, Jon Cooper, Graham Gibson and Miles J. Padgett.
“ berration correction in holographic optical tweezers”, Optics Express, 14, 9, 4170-4715, May 2006.
[19] E. Pleguezuelos, J. Andilla, A. Carnicer, E. Martin-Badosa, S. Vallmitjana and M. Montes-Usategui. “Design of a low-cost, interactive, holographic optical tweezers system”, Optical Trapping and Optical Micromanipulation III, San Diego, August 2006.
[20] Jorge Enrique Rueda, Ana Ludia Romero, Luis Alfonso Guerra.
“Characterization of Reflective TN-LCD, Tuned in Phase-Only Modulation and to Six Wavelengths”, Photonics Society of Poland, 2, 4, 174-176, 2010.