Liquid Crystal Lens for Axially Distributed
Three-Dimensional Sensing
Yi-Pai Huang*, Chih-Wei Chen
Department of Photonics & Institute of Electro-Optical Engineering/Display Institute,
National Chiao Tung University, Hsinchu, 30010, Taiwan
Myungjin Cho
Electrical, Electronic, and Control Engineering, Hankyong National University,
Ansung, 456-749, South Korea
Bahram Javidi
Electrical and Computer Engineering Department, University of Connecticut,
Storrs, Connecticut 06269, USA
In this paper, we present a novel three-dimensional (3D) sensing system which can demonstrate 3D acquisition. The proposed system is using an electronically tunable liquid crystal (LC) lens with axially distributed sensing method. Therefore, multiple 2D images with slightly different perspectives by varying the focal lengths of the LC lens without mechanical movements of an image sensor can be recorded. And then the 3D images are further reconstructed according to the ray-back projection algorithm. The preliminary functionalities are also demonstrated in this paper. We believe that our proposed system may useful for a compact 3D sensing camera system
Keywords: Liquid crystal lens, axially distributed sensing.
1. INTRODUCTION
Three-dimensional integral imaging (InIm) has become a popular technique for 3D sensing and visualization. In integral imaging system, lens array or camera array is used to record 3D information from the scene. Then, the 3D scene can be reconstructed numerically or optically1-6 from the recorded 2D images, which have different perspectives between each one. Another method, axially distributed sensing (ADS) 7-8, for 3D acquisition is also proposed to capture multiple 2D images with slightly different perspectives for 3D scene by moving single image sensor along its optical axis. The object is located at a certain distanceaway from the closest camera position. Then the camera translates along its optical axis and takes numbers of plane images. The object in the multiple 2D images will have different magnification because each image is captured at different distances from the object. Finally, 3D images can be reconstructed by ray back-propagation method. However, the movement of the image sensor is unpractical for a compact system. The tunable liquid crystal (LC) lens9-13 whose focal length can be electronically changed has been proposed. Varying the focal length electronically, the multiple 2D images with slightly different perspectives can be obtained. In this paper, we propose a 3D image sensing system by combining the axially distributed sensing technique with the tunable liquid crystal lens. Therefore, a new axially distributed sensing system without moving the image sensor can be obtained. Finally, the preliminary results of computational 3D reconstruction also demonstrate our approach.
2.
PRINCIPLE
To get the better focusing ability of liquid crystal lens, the refractive index distribution in the LC layer played an important role. From the formula of GRIN lens14, the effective refractive index (neff) distributionmust consist with the
parabolic curve which derived in Eq. (1). Here Δn is ne (extraordinary) - no (ordinary), d is the cell gap, r is the lens
radius, and f is the focal length. In this paper, we proposed a high resistance Liquid Crystal (HR-LC) lens15-16 which coated a high resistance material on the controlled electrodes layer as shown in Fig. 1. Using the high-resistance layer,
*[email protected]; phone +886 3 571-2121 ext 52924; fax +886 3 573-7681 Invited Paper
Three-Dimensional Imaging, Visualization, and Display 2013, edited by Bahram Javidi, Jung-Young Son, Proc. of SPIE Vol. 8738, 873804 · © 2013 SPIE · CCC code: 0277-786X/13/$18 · doi: 10.1117/12.1518457
Proc. of SPIE Vol. 8738 873804-1
4Wr
iliatto"04011
x
LC Lens (fi)++
.
++
.'
+++
'.
.
Object z;.
.
. + + .+ "'"'1+
d;Z
Sensor zi=z1+4 di=drAd¡Figure 1. Sketch of the proposed high resistance LC lens 2
2
r
n
d
f
(1) the gradient changed potential distribution can be easily produced. Applying the different voltages between the center electrode, planar electrode, and edge electrode (see Fig.1), the electric field is generated. Thus the LC molecules will reorient according to the electric field. Finally, the parabolic curve of Δn could be approached. In this paper, we used a HR-LC lens whose diameter and LC-cell gap were designed as 2mm and 60m, respectively. The LC material is E7 (Merck) and aligned with x-direction. The polarization of incident light is also aligned with the x direction. Finally, the focal length can be varied between 4cm to ∞ when switching driving voltages from 5Vrms to 0Vrms (1KHz frequency,square wave).
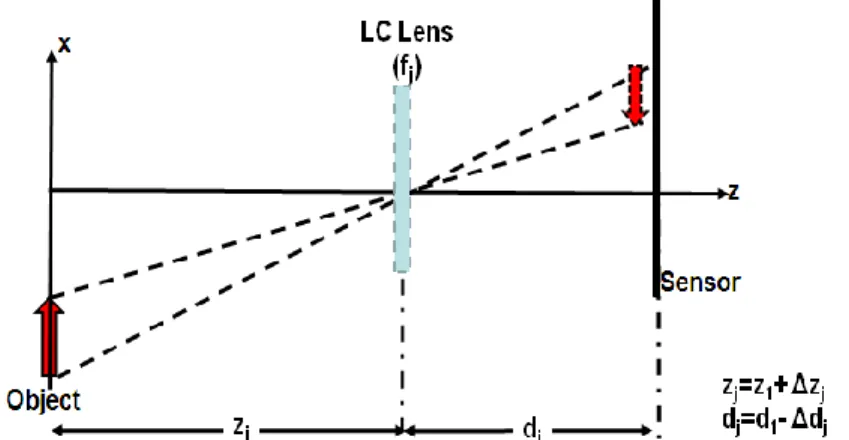
The proposed axially distributed sensing system with HR-LC lens is shown in Fig. 2. The object is located in front of the LC lens and away from the optical axis in order to obtain different perspectives of the objects. A sensor is fixed and placed a distance away from the LC lens. Changing the focal lengths of the LC lens, multiple 2D images with different magnifications (perspectives) can be captured. For instance, the magnification factor Mj between the first image (the image taken by shortest focal length) and j-th image
(see Fig.3) can be described by Eq. (2).
1 1 j j j
z
d
M
z
d
(2)Following, the 3D images can be reconstructed by using these multiple 2D images and ray-back projection algorithm. According to the ray-back projection algorithm, all 2D images are projected with different magnification factors on the reconstruction plane at zr. Then the reconstructed 3D image I(x, y, zr) can be obtained by superposing all
the projected images with different magnification factors as the following:
Figure 2.The proposed 3D sensing system: axially distributed sensing using HR-LC lens.
Proc. of SPIE Vol. 8738 873804-2
1 0
1
( , ,
)
,
,
K r j r j j jx
y
I x y z
E
z
K
M
M
(3where Mj is the corresponding magnification factor between the selected jth elemental image and the first elemental
image as described in Eq. (2), Ej is the magnified jth elemental image, and K is the total numbers of recorded 2D images.
3. EXPERIMENTAL RESULT
The functionality of the proposed 3D axially distributed sensing system is demonstrated by the optical experiment. A totem is located at approximately 15mm in front of the LC lens. A cell phone camera is used and fixed behind from the LC lens to capture all in-focused 2D images. For the capturing processing, the driving voltage of the LC lens is swept from 5Vrms to 0Vrms (0.3V/step) so that the focal length changed from 4cm to ∞. Hence, the total K=14 2D images can be
recorded sequentially. Figure 3 (a)(b) shows an example of the captured first and twelfth 2D images. We can distinguish the slightly difference (magnification of the object) between the two images. Using computational reconstruction and all 2D recorded images, 3D image can be reconstructed. Figure 3(c)(d) shows the reconstruction results at z=5mm and z= 15mm away from the LC lens. For the reconstructed image at z=5mm, the totem is blurred [See Fig. 3(c)]; on the contrary, the totem becomes focused in the reconstructed image at z=15mm. [See Fig. 3(d)].Consequently, the preliminary results successfully demonstrated our proposed method.
(a) (b) (c) (d)
Figure 3. (a) Recorded 2D images with different focal lengths of HR-LC lens for (a) the first image (fLC=4cm) and the
twelfth image (fLC=20cm), and (b) computational 3D reconstruction of the scenes at 5mm and 15mm.
4.
CONCLUSION
We presented a 3D imaging system without any mechanical movement by combining the axially distributed sensing with electronically controlled LC lens. The functionality of the proposed HR-LC lens was demonstrated. And the reconstructed 3D slices were also generated from the recorded 2D images. We believe that the proposed system is easy and powerful for the compact 3D sensing camera application.
5.
ACKNOWLEDGEMENT
This work was supported by National Science Council, for Academic Projects No.NSC99-2221-E-009-066-MY3. We also would like to thank Mr. P. Y. Shieh, and Mr. A. Markman for their valuable discussion and technical support.
6.
REFERENCES
[1] G. Lippmann, “La photographie integrale,” C. R. Acad. Sci. Paris Ser. IV Vol. 146, pp. 446-451, (1908).
[2] J. S. Jang and B. Javidi, “Three-dimensional synthetic aperture integral imaging,” Optics Letters, Vol. 27, pp. 1144-1146, (2002).
[3] F. Okano, J. Arai, K. Mitani, and M. Okui, “Real-time integral imaging based on extremely high resolution video system,” Proceedings of IEEE, Vol. 94, pp. 490-501, (2006).
[4] A. Stern and B. Javidi, “Three-dimensional image sensing, visualization, and processing using integral imaging,” Proceeding of IEEE, Vol. 94, pp. 591-607, (2006).
Proc. of SPIE Vol. 8738 873804-3
[5] R. Martinez-Cuenca, G. Saavedra, M. Martinez-Corral, and B. Javidi, “Progress in 3-D Multiperspective Display by Integral Imaging,” Proceedings of IEEE, Vol. 97, pp. 1067-1077, (2009).
[6] M .J. Cho, M. Daneshpanah, I. Moon, and B. Javidi, “Three-dimensional Optical Sensing and Visualization Using Integral Imaging,” Proceedings of IEEE, Vol. 99, pp. 556-575, (2011).
[7] R. Schulein, M. Daneshpanah, and B. Javidi, “3D Imaging with Axially Distributed Sensing,” Optics Letters, Vol. 34, pp. 2012-2014, (2009).
[8] D. H. Shin, M. J. Cho, and B. Javidi, “Three-dimensional Optical Microscopy Using Axially Distributed Image Sensing,” Optics Letters, Vol. 35, pp. 3646-3648, (2010).
[9] S. Sato, “Liquid-crystal lens–cells with vari able focal length,” Japanese Journal of Applied Physics, Vol. 18, pp. 1679-1684, (1979).
[10] H. W. Ren and S. T. Wu, “Adaptive Liquid Crystal Lens with Large Focal Length Tunability,” Optics Express, Vol. 14, pp. 11292-11298, (2006).
[11] Y. P. Huang, L. Y. Liao, and C. W. Chen, “2D/3D switchable autostereoscopic display with multi-electrically driven liquid crystal lenses,” Journal of Society Information Display, Vol. 18, pp.642- 646 (2010)
[12] C. W. Chen and Y. P. Huang, “Superzone Fresnel Liquid Crystal Lens for Temporal Scanning Auto-stereoscopic Display,” to be published by IEEE Journal of Display Technology.
[13] Y. Liu, H. W. Ren, S. Xu, Y. Chen, L. Rao, T. Ishinabe, and S. T. Wu, “Adaptive Focus Integral Image System Design Based on Fast-Response Liquid Crystal Microlens,” IEEE Journal of Display Technology, Vol. 7, pp. 674-678, (2011).
[14] E. Hecht, [Optics], Addison Wesley, (2002).
[15] A. F. Namov, G. D. Love, M. Y. Loktev, and F. L. Vladimirov, “Control optimization of spherical modal liquid crystal lenses, ” Opt. Express, vol. 4, pp. 344-352, (1999).
[16] C. W. Chen, Y. P. Huang, Y. C. Chang, P. H. Wang, P. C. Chen, and C. H. Tsai, “Cylindrical Liquid Crystal Lenses System for Autostereoscopic 2D/3D Display,” Proceedings of SPIE, 8384-18, (2012).
Proc. of SPIE Vol. 8738 873804-4