a new fast watershed algorithm, named P-Watershed, for image sequence segmentation is proposed. By utilizing the temporal co-herence property of the video signal, this algorithm updates wa-tersheds instead of searching wawa-tersheds in every frame, which can avoid a lot of redundant computation. The watershed process can be accelerated, and the segmentation results are almost the same as those of conventional algorithms. Moreover, an intra-inter watershed scheme (IP-Watershed) is also proposed to further im-prove the results. Experimental results show that this algorithm can save 20%–50% computation without degrading the segmenta-tion results. This algorithm can be combined with any video seg-mentation algorithm to give more precise segseg-mentation results. An example is also shown by combining a background registration and change-detection-based segmentation algorithm with P-Wa-tershed. This new video segmentation algorithm can give accurate object masks with acceptable computation complexity.
Index Terms—Fast algorithm, image segmentation, predictive
watershed, video segmentation, watershed.
I. INTRODUCTION
W
ATERSHED transform, which can separate an image into many homogeneous nonoverlapped closed regions, has been widely applied in image segmentation algorithms. It is also applied to image sequences as a core operator of video seg-mentation, which is a key technique in MPEG-4 content-based encoding systems [1]. Video segmentation algorithms with wa-tershed transform [2]–[6] are taken as mainstream since they can generate object masks with accurate boundaries.Many watershed algorithms have been proposed [7]–[11]. Vincent and Soille proposed a watershed algorithm using immersion simulations [7]. With sorting before the flooding process and with priority queue, this algorithm is dramatically faster than any former ones. Beucher and Meyer’s algorithm also uses immersion simulations [8], [9]. Two types of al-gorithms are included: one creates watershed pixels and the other produces a complete tessellation of an image. An ordered queue is used in this algorithm, whose concept is similar to that of Vincent and Soille’s algorithm; however, the minima of the input image need to be detected and labeled first, thus increases the complexity of this algorithm. Dobrin et al.. proposed a fast watershed algorithm named split-and-merge algorithm [10]. It can solve the isolated area problems of the former two
Manuscript received May 21, 2002; revised August 5, 2002. This work was supported in part by SiS Education Foundation. This paper was recommended by Associate Editor H. Sun.
The authors are with the DSP/IC Design Lab, Graduate Institute of Elec-tronics Engineering, Department of Electrical Engineering, National Taiwan University, Taipei 106, Taiwan, R.O.C. (e-mail: [email protected]; [email protected]; [email protected]).
Digital Object Identifier 10.1109/TCSVT.2003.811605
transform for video segmentation is often required to produce a tessellation of an image, where the isolated area problem would not occur. Moga et al.. proposed a watershed algorithm suitable for parallel implementation [11]. With parallel computation, the watershed algorithm can be further accelerated. However, it is also complex and requires a powerful platform, which is impractical for general cases.
Although Vincent and Soille’s algorithm provides fast computation, it is still not fast enough for real-time video segmentation. Moreover, video segmentation is different from image segmentation. The temporal information is important in video signal processing. Applying image-signal-processing algorithms on each frame for the video signal will lead to redundant computation.
This paper proposes a predictive watershed algorithm (P-Wa-tershed) for image sequence segmentation on the basis that wa-tersheds are highly related to original frame data. It “updates” watersheds instead of recalculating watershed transform frame by frame. The watershed process can be accelerated, and the re-sults are almost the same as those of conventional watershed al-gorithms. Furthermore, the segmentation results can be further improved with the intra-inter watershed scheme (IP-Watershed). The concepts of watershed and Vincent and Soille’s algo-rithm will be introduced in Section II. Section III and Section IV describe the proposed algorithm and the simulation results, re-spectively. In Section V, predictive watershed is employed with a prior video segmentation algorithm to improve the perfor-mance. Finally, Section VI provides a conclusion.
II. WATERSHED
This section introduces the concept and a conventional al-gorithm of watershed. First, the concept of morphological wa-tershed and immersion simulation are shown. Then the famous Vincent and Soille’s algorithm is presented, which is an impor-tant benchmark algorithm to be compared with the proposed al-gorithm.
A. Morphological Waterhsed
Watershed transform is originally developed in the field of topography, and it is found to be useful in digital image pro-cessing. The first step of morphological watershed is morpho-logical gradient. The gradient level of an image is then seen as the altitude level to form a topology surface. Water flooded into this surface will flow to the lower parts of this surface because of gravity. As shown in Fig. 1, water will flow to the minimum of each catchment basin. If we give the water in each
catch-ment basin a special label and keep flooding water, water from
454 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 13, NO. 5, MAY 2003
Fig. 1. Illustration of watersheds.
different catchment basins will interflow at watersheds.
Water-sheds, which correspond to parts of an image with a high
gra-dient level, are then detected, and they can be used to separate an image into many homogeneous closed regions.
The flooding process is often done with two mechanisms: im-mersion or rainfall. The imim-mersion simulation is more popular and is described below. First, we pierce holes at the minimum of each catchment basin, and water is flooded from these holes to form small lakes. When water from different catchment basins is going to interflow, a “dam” is built. After the whole surface is flooded, these dams correspond to the watersheds of this image.
B. Vincent and Soille’s Algorithm
Vincent and Soille’s algorithm [7] is the most famous and is deemed as the fastest watershed algorithm [12]. This algorithm can be briefly illustrated in Fig. 2 and by the following steps.
Step 1) Morphological gradient is applied in the whole frame to find the gradient value of every pixel. Step 2) All the pixels are first sorted according to their
gra-dient level. Pixels with lower gragra-dient level will be manipulated first.
Step 3) As shown in Fig. 2(a), pixels with the lowest gradient level of an image are first found, and pixels of each connected region are given a special label.
Step 4) Pixels are then processed from the lower to higher gradient level. In each level, pixels with labeled neighbors are first added to the priority queue, as the two white balls shown in Fig. 2(b). The label of the pixel at the beginning of the queue is determined by its labeled neighbors, and the pixel is then removed from the queue. After all pixels with labeled neigh-bors are processed, pixels without labeled neighneigh-bors are found and given a new label, as the black ball shown in Fig. 2(b).
Step 5) After all pixels are labeled, the boundaries between regions with different labels are the watersheds of this image. In Fig. 2(c), the surface is divided into four regions, and three watersheds are detected. Although this algorithm is efficient since each pixel of the image is accessed only once in the flooding process, the compu-tation load is still large. For video segmencompu-tation, large temporal information redundancy exists. Therefore, applying a morpho-logical gradient filter, address sorting, and flooding process on every pixel every frame introduces large redundant
computa-Fig. 2. Illustration of Vincent and Soille’s watershed process.
tion, which makes this algorithm inefficient for video segmen-tation.
III. PROPOSEDWATERSHEDALGORITHM
For image sequences segmentation, Vincent and Soille’s al-gorithm can be further accelerated when considering temporal coherence of sequences. The core concepts of the proposed al-gorithm are as follows.
1) Watersheds are highly related to the original image se-quences.
2) Temporal coherence of image sequences leads to redun-dant computation when watershed transform is applied to the whole image frame by frame, that is, the process can be accelerated with “updating” scheme.
3) The computational intensity of sorting and flooding in the watershed algorithm is proportional to the number of processed pixels, that is, reducing the number of pixels can accelerate the process.
4) Since watershed is a global operation, the algorithm should be modified in the updating area to keep the globalization.
With these concepts, a new fast algorithm is proposed as fol-lows.
A. Predictive Watershed
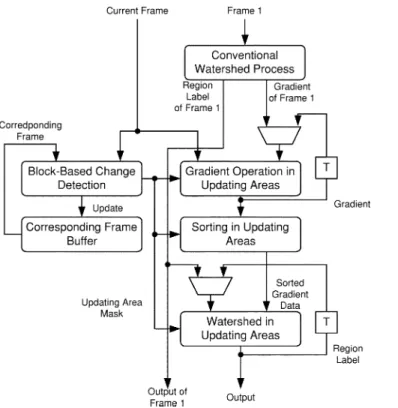
The block diagram of the proposed watershed algorithm is shown in Fig. 3. The first frame of an image sequence is processed with the conventional Vincent and Soille’s algorithm, while keeping the region label and gradient information, as shown in Fig. 4(a). The corresponding frame stores the original frame data to whom the current watersheds correspond and is set to be the same as the first frame at this time. An updated
area mask (UAM) is used to indicate the changing parts of the
Fig. 3. Block diagram of the proposed watershed algorithm.
need to be updated. Since the UAM is set to be zero in the first frame, gradient operation in updating areas and watershed
in updating areas just pass the gradient values and the region
labels of the first frame to the memories (or the delay elements), as shown in Fig. 4(a).
From the second frame, the proposed watershed algorithm named predictive watershed (P-Watershed) takes over, and the conventional watershed process is turned off, as presented in Fig. 4(b). The current frame and corresponding frame are input into block-based change detection to form updating area mask
(UAM), and the corresponding frame is then updated with the current frame and UAM. These two frames are first separated
into small blocks, whereas the selection of block size will be discussed in Section IV. The operation executed in block-based
change detection can be formulated, for each block, as the
fol-lowing equations: (1) if and block i else (2) if else (3)
where CFrame is the current frame, CorFrame is the corre-sponding frame, and is the sum of absolute difference of the th block of the current frame and corresponding frame. is the threshold to decide if the content of a block is “changing.” It can be decided with a significance test [13] where the users can choose the significance level according to the applications, and the threshold can be decided according to the significance level. The test statistic is the sum of absolute value of frame
dif-Fig. 4. Procedures of the proposed watershed algorithm for (a) the first frame and (b) the other frames.
ference. The threshold value is decided by required significance level. Their relation is shown in the following equation:
(4) where is the significance level, is the threshold value, is the sum of absolute difference of a block, and denotes the null hypothesis that there is no change at the current block. The selection of the threshold depends on the environments and the applications. Namely, for smaller camera noise, can be smaller. For higher correctness requirements, a smaller can be chosen; however, the penalty will be the higher false alarm rate. Note that the change detection here is different from that for video segmentation. Unlike video segmentation, where un-covered background should be avoided, in predictive watershed, it is used to indicate the changing parts of the frame, including uncovered regions and occluded regions. The watersheds in the
456 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 13, NO. 5, MAY 2003
Fig. 5. Illustration of the proposed watershed process.
changing parts are then updated regardless of whether they be-long to foreground or background objects.
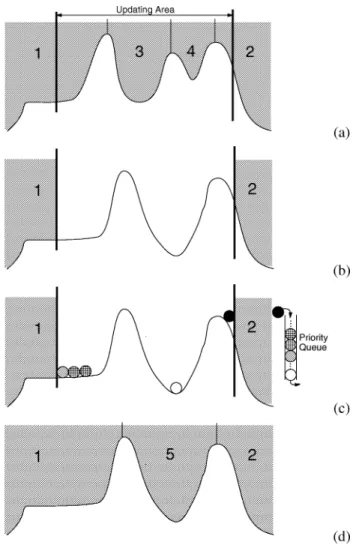
The generated UAM can indicate the changing parts of the image and the corresponding watersheds to be updated. Next, morphological gradient and sorting are applied only to pixels in the updating area (UA), which is indicated by UAM. The water-shed process is then also applied only in UA. The whole process is shown in Fig. 5 and involves the following steps.
Step 1) Fig. 5(a) shows the region labels and gradient values of the previous frame, and the updating area is marked.
Step 2) As shown in Fig. 5(b), region labels and gradient values in UA are removed, and morphological gra-dient operation is then employed in UA to generate gradient values of the current frame. Gradient
op-eration in updating areas in Fig. 4(b) executes the
operations of this step.
Step 3) Pixels in UA are sorted according to the gradient level, which is executed in sorting in updating areas in Fig. 4(b).
Step 4) Pixels in UA are then processed from lower to higher gradient level. In each level, the process is the same as Step 4 of Vincent and Soille’s algorithm. Note that neighbors outside UA are also taken into considera-tion, as shown in Fig. 5(c). The twilled ball has a
Fig. 6. Example of the proposed watershed algorithm. (a) Watersheds of previous frame. (b) Updating area mask. (c) Watersheds in the updating area, which will then be used to update the watersheds of previous frame. (d) Watersheds of current frame, which is generated by updating watersheds in (a) by watersheds in (c). The difference between (a) and (d) can be found clearly around the ball.
neighbor point outside UA in region 1; therefore, it will be also labeled as region 1. Similarity, the black ball will be labeled as region 2. After all pixels with labeled neighbors are processed in each level, pixels without labeled neighbors are found and given a new label, as the case of the white ball shown in Fig. 5(c). In Fig. 4(b), watershed in updating areas takes charge of this step.
Step 5) After all pixels are labeled, the boundaries between regions with different labels are the watersheds of this image. In Fig. 5(d), two watersheds are detected. An example of P-Watershed is shown in Fig. 6. In Fig. 6(a), the previous frame and its watersheds are shown. The UAM is shown in Fig. 6(b), and the watersheds in UA are then generated as shown in Fig. 6(c). Finally, in Fig. 6(d), the watersheds of the current frame are formed by updating the watersheds in UA. The difference between Fig. 6(a) and (d) can be found clearly around the ball.
Only parts of pixels are processed, hence the proposed algo-rithm is faster than the conventional watershed algoalgo-rithm. Pixels inside UA are processed with the conventional algorithm, and the region labels and gradient information outside UA are also taken into consideration; therefore, the globalization property is also kept with this scheme.
B. Hybrid Scheme
Although the segmentation results are almost the same as those of the conventional watershed algorithms, the proposed algorithm may introduce error in the following conditions. First, change detection is not sensitive enough. Second, the minimum of a catchment basin is included in UA, and a part the catch-ment basin is not included. Third, the scenes change a lot. The error will propagate in the proposed predictive watershed algo-rithm. The error propagation can be interrupted by inserting a
Fig. 8. Block size analysis showing that 82 8 is the optimal block size.
frame where watersheds are generated with the conventional al-gorithm. These watersheds do not need information from the previous frame, so we have the term “intra watershed” (I-Water-shed). The I-Watershed and P-Watershed hybrid scheme, called IP-Watershed, is illustrated in Fig. 7. It can accelerate the wa-tershed process and maintain accuracy at the same time.
The time to insert an I-Watershed can be decided with the fol-lowing two strategies to interrupt the error propagation. To deal with the first and the second error conditions described above, we can insert an I-Watershed frame after a fixed number of P-Watershed frames. The fixed interval to insert an I-Watershed frame depends on the threshold and the error rate required for the applications. After is decided, the error accumula-tion behavior, which is the amount of increasing error for each frame, is also decided. An I-Watershed should be inserted when the accumulated error exceeds the required error rate. The less the error accumulated in each frame, the longer the interval to insert an I-Watershed frame; the tighter the error requirement, the shorter the interval. On the other hand, to deal with the third condition, scene change condition, the error rate is monitored in each frame. An I-Watershed frame is inserted dynamically when the monitored error rate exceeds a required value. These two strategies can be employed simultaneously to interrupt error propagation effectively. An example is presented in Section IV.
IV. SIMULATIONRESULTS
Block size analysis for determining the optimal block size is shown in Fig. 8. The accuracy of the segmentation results is evaluated by the difference in region number, that is, the less average difference in region number between the results of the conventional algorithm and the proposed one, the higher the ac-curacy. Since regions in UA and outside UA are both processed with the conventional watershed algorithm, the positions of wa-tersheds must be very close to those of the conventional algo-rithm, and only the over-segment problem may occur; the re-gion number information is enough to evaluate the accuracy of
Fig. 9. Region number of different run-time situations.
watersheds, i.e., the closer the region number is between the result the of the conventional watershed transform and that of the proposed one, the more accurate the proposed algorithm is. The ratio of the run time of the proposed algorithm to that of the conventional watershed algorithm is used as another crite-rion in this analysis. For each block size, a different threshold value is tested to decide the runtime-accuracy curve shown in Fig. 8. The lower the threshold, the higher the runtime ratio, and the lower the average difference of region number. The test sequence is Children. Fig. 8 shows that 8 8 is the optimal block size because it can provide higher accuracy with less run time than other choices. Several sequences were tested to give a similar conclusion.
The region number corresponding to a different run time is shown in Fig. 9. As can be seen, when the run time increases, the similarity between the results of the conventional watershed and the proposed one also increases. When the run time is reduced to 61%, the region number is still very similar to the reference results.
The segmentation results of Vincent and Soille’s algorithm and the proposed one are shown in Fig. 10. Sequences Akiyo,
Hall Monitor, and Mother and Daughter were tested on a
PC with a Pentium-III 800-MHz processor. The execution time compared with Vincent and Soille’s algorithm is shown in Table I. Only core operations of watershed are recorded, namely, the gradient operation, sorting process, and flooding process. Note that the average difference in region number is fixed at 5% in these experiments. The simulation results show that the proposed algorithm can save 20%–50% of the compu-tation. Moreover, the results of the conventional and proposed algorithms are similar, as shown in Fig. 10. Consequently, the proposed algorithm can reduce computational intensity while maintaining segmentation quality.
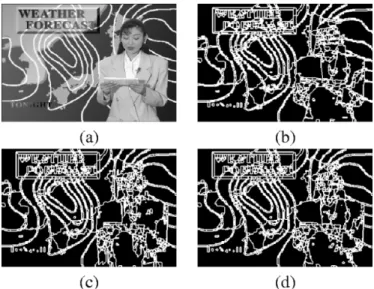
The simulation results of IP-Watershed are shown in Figs. 11 and 12, where Weather is used as the test sequence. Both strate-gies to insert I-Watershed frame described in Section III-B are employed. The threshold is found to be 320 by significance test. If the error rate is evaluated by the region number difference ratio (RNDR), which is the ratio of the region number difference to the region number of current frame derived with conventional watershed algorithm (reference region number), the error rate curve is shown in Fig. 13. If we set RNDR , the fixed interval should set as about 20 frames, namely, an I-Watershed frame is inserted every 20 frames. On the other hand,
I-Water-458 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 13, NO. 5, MAY 2003
Fig. 10. (a), (d), (g) Original frame of sequence Akiyo, Hall Monitor, and Mother and Daughter. (b), (e), (h) Watersheds generated with the conventional watershed algorithm. (c), (f), (i) Watersheds generated with the proposed algorithm. The 50th frame of these sequences is shown.
TABLE I
RUN-TIMECOMPARISONBETWEEN THEPROPOSEDALGORITHM ANDVINCENT ANDSOILLE’s ALGORITHM
shed frames are also inserted dynamically to deal with scene change condition. The values of RNDR cannot be obtained in real cases since the region number of current frame derived with conventional watershed algorithm are not available; therefore, we use an estimated RNDR (ERNDR) value to evaluate the error rate, where the reference region number is substituted by the region number of nearest prior I-Watershed frame. In these experiments, we set ERNDR , that is, if the monitored ERNDR value is higher than 5%, an I-Watershed frame is in-serted. Fig. 11 shows that compared with P-Watershed, IP-Wa-tershed can give results more similar to those of conventional algorithms. Note that I-Watershed frames are inserted at frame 1, 21, 41, 61, 81 according to the first strategy and frame 14
Fig. 11. Simulation results of the IP-Watershed (test sequence: Weather).
according to the second strategy. The segmentation quality can be improved with IP-Watershed as shown in Fig. 12, where the result of IP-Watershed [Fig. 12(d)] is more similar to that of the conventional algorithm [Fig. 12(b)] than that of P-Water-shed [Fig. 12(c)]. The lower middle regions of Fig. 12(b)–(d) are, respectively, magnified to Fig. 14(a)–(c) to show the results more clearly. The results show that although the segmentation result of IP-Watershed is slightly different than that of the con-ventional algorithm, it is better than that of the P-Watershed al-gorithm, where the over-segmentation problem occurs. V. VIDEOSEGMENTATION BYUSE OFPREDICTIVEWATERSHED
The proposed fast algorithm can be combined with video seg-mentation to improve the segseg-mentation results. An example is
Fig. 12. (a) Original frame of sequence Weather. Watersheds generated with (b) the conventional watershed algorithm, (c) the P-Watershed algorithm, and (d) the IP-Watershed. (d) is more similar to (b) than (c).
Fig. 13. Region number difference ratio curve of sequence Weather under
Th = 320.
Fig. 14. Detailed segmentation results of: (a) the conventional watershed algorithm; (b) the P-Watershed algorithm; and (c) the IP-Watershed.
presented in this section, where a new video segmentation algo-rithm is proposed. The block diagram of the proposed algoalgo-rithm is shown in Fig. 15. It is developed from the real-time change de-tection and background registration based algorithm proposed in [14], [15], as well as the predictive watershed algorithm.
The algorithm has two modes: a baseline mode for general situations and a shadow-cancellation mode for video sequences influenced by light changing and shadow effects. In baseline mode, gradient filter is bypassed. First, the background registra-tion technique can extract background informaregistra-tion from accu-mulated frame difference of successive frames. The frame dif-ference and background difdif-ference, which is the frame differ-ence between the current frame and background frame, are then thresholded and combined to form an initial object mask. Next, the initial object mask is refined by eliminating the noise
re-Fig. 15. Block diagram of the proposed video segmentation algorithm.
gions in the mask. Meanwhile, the predictive watershed process generates region label information; that is, the current frame is divided into many homogeneous regions, and each region is la-beled with an unique label. Finally, regions are selected by the
refined mask to form the object mask. If the percentage of pixels
in the refined mask within a region is beyond a threshold, the whole part of the region is labeled as a foreground object; oth-erwise, it is regarded as a background region. In the shadow-can-cellation mode, the gradient filter is used to suppress the effect of shadow and light changing.
A. Simulation Results
The segmentation results of the original real-time change de-tection and background registration-based algorithm [14], [15] and the proposed algorithm are shown in Fig. 16(b) and (e) and Fig. 16(c) and (f), respectively. The IP-Watershed algorithm is adapted in these experiments. As seen in the comparison, the proposed algorithm provides more precise segmentation results. The difference of the accuracy can be easily observed around the heads of the children in Fig. 16(b) and (c) and around the face of the mother in Fig. 16(e) and (f). It can improve the segmenta-tion results by fitting the object masks to the regions generated with watershed transform.
Fig. 17 shows the simulation results of sequence Akiyo,
460 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 13, NO. 5, MAY 2003
Fig. 16. Comparison between the segmentation results of (b), (e) the original segmentation algorithm and (c), (f) the proposed algorithm. The boundaries of object masks are more accurate in (c), (f) than those of (b), (e). (a), (b) are the original frames.
Fig. 17. Segmentation results of sequence Akiyo, Mother and Daughter, Hall Monitor, and Children.
are picked from each sequence. The segmentation results are very precise at boundaries.
The run-time analysis, found in Fig. 18, shows that the run time of the previous segmentation algorithm takes 24% of the whole run time. Only 106.64 ms is required to process a single frame on a PC with a Pentium-III 800-MHz processor, and the
Fig. 18. Run -time analysis.
processing speed is 9.4 QCIF frames per second, which is very close to real-time requirement. The algorithm can be further op-timized, and will be included in future work.
VI. CONCLUSION
A new predictive watershed algorithm named P-Watershed for video segmentation is proposed in this paper. Taking into consideration the temporal coherence property of the video signal, the watershed algorithm can be accelerated. It updates watersheds in changing parts while keeping watersheds in other parts of a frame. The watershed process can be accelerated, and the results are almost the same as those of the conventional watershed algorithms. Moreover, the segmentation results can be further improved with the intra-inter watershed scheme, which is named the IP-Watershed. The proposed algorithm can be combined with any video segmentation algorithm to improve the segmentation results.
REFERENCES
[1] T. Sikora, “The MPEG-4 video standard verification model,” IEEE Trans. Circuits Syst. Video Technol., vol. 7, pp. 19–31, Feb. 1997. [2] Annex f: Preprocessing and Postprocessing, ISO/IEC JTC 1/SC
29/WG11 N3056.
[3] D. Wang, “Unsupervised video segmentation based on watersheds and temporal tracking,” IEEE Trans. Circuits Syst. Video Technol., vol. 8, pp. 539–546, Sept. 1998.
gorithm based on immersion simulations,” IEEE Trans. Pattern Anal. Machine Intell., vol. 13, pp. 583–598, June 1991.
[8] F. Meyer, “Color image segmentation,” in Proc. Int. Conf. Image Pro-cessing and Its Applications, 1992, pp. 303–306.
[9] E. R. Dougherty, Ed., Mathematical Morphology in Image Pro-cessing. New York: Marcel Dekker, 1993, ch. 12, pp. 433–481. [10] B. P. Dobrin, T. Viero, and M. Gabbouj, “Fast watershed algorithms:
analysis and extensions,” in SPIE Nonlinear Image Processing V, vol. 2180, 1994, pp. 209–220.
Communication and Image Processing, 2000, pp. 1087–1098. [15] S.-Y. Chien, S.-Y. Ma, and L.-G. Chen, “Efficient moving object
seg-mentation algorithm using background registration technique,” IEEE Trans. Circuits Syst. Video Technol., vol. 12, pp. 577–586, July 2002.