國立臺灣大學工學院機械工程學研究所 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
電動車輪內馬達之動態減振探討與分析
Dynamic Analysis and Improvement for the Electric Vehicle with In-Wheel Motor
周牧民 Chou,Mu-Ming
指導教授:劉 霆 博士 Advisor: Liu, Tyng, Ph.D.
中華民國 102 年 7 月
July,2013
ii
誌謝
感謝恩師 劉霆教授這兩年來於研究上的指導及生活中的關懷,令學 生於研究所求學期間受益良多,並使本論文得以順利完成。同時感謝口試 委員鍾天東教授與尤正吉教授撥冗審閱我的論文,勘正錯誤,並提供諸多 寶貴意見,使本文更趨於完善。MMT 的生活有學長的殷勤指教,更是使 我成長的一大動力,感謝正平、羿名、振逵學長的教導。同一屆的戰友們,
郭神宋神柏緯家維,謝謝你們容忍我常常問東問西,有你們我的論文才生 的出來,有你們我才能夠快快樂樂的畢業平平安安的回家。感謝烏龜學長,
碩二的這年為你找了一個烏龜學妹,希望你會喜歡。常常在午夜時分論文 打到一半沒有靈感的時後去找您討教,看您優游自在地在水裡游來游去,
人生彷彿又找到了另一個出口,不禁文思泉湧,振筆疾書。
當然,還要感謝我最愛的家人,是你們使我於精神上及物質上皆不虞 匱乏,得以全心投入研究,順利完成學業。在此,僅將本論文獻給我最親 愛的家人與朋友們。
iii
電動車輪內馬達之動態減振探討與分析
周牧民
摘要
輪內馬達可以簡化車輛傳動系統並有節省較大的車室空間的優勢,目前電動 車發展上被視為一個主要方向,但是輪內馬達造成簧下質量增加的結果,會讓車 輛動態特性有明顯的影響。針對輪內馬達電動車,本研究探討設計方法以期能夠 改善車輛的舒適性與操控性。本研究首先就並聯式輪內馬達懸吊系統,研究系統 的特性參數彈簧值、阻尼值的影響並做最佳化運算,針對目標舒適性與貼地性找 到相對應的二次懸吊值解。其次則是增加電動車簧上的電池組的自由度,利用動 態減振原理設計出一套電池動態減振系統,以消減車身震動。電池動態減振系統 有許多設計參數,諸如自然頻率、阻尼比、配置等都會對該系統的效用產生顯著 影響,故本研究將在四分之ㄧ車與二分之ㄧ車數值模型上進行參數模擬討論。最 後,分別統整上述兩種方法模擬出的結果,找出系統參數的調整方向,期望能夠 改善輪內馬達電動車的動態特性。
關鍵字:輪內馬達、動態減振、簧下質量、車輛動態特性
iv
Dynamic Analysis and Improvement for the Electric Vehicle with In-Wheel Motor
Chou Mu-Ming Abstract
In-wheel motor may simplify the transmission systems of the vehicle and make a larger car room space allocation, so it is an important direction in the development of vehicle electrification. However, in-wheel motor build-in the unsprung mass, which obviously influence vehicles dynamic. The research will focus on the effect of in-wheel motor and the design method for the electric vehicles to improve the handling and ride comfort of vehicle. This research ,firstly ,is to analyze damping and spring coefficients of second suspension which build-in the unsprung mass and next optimize the second suspension system. Then, this research is to design a new system, called battery dynamic absorbers system base on the dynamic vibration absorbers theory. This system may provide the force ,which lower the vibration of the car body.
In order to design Battery dynamic absorbers system, there are characteristics that this study will discuss such as damping ratio, natural frequency and the location of this system. This research will use quarter car and bicycle car model to analyze the influence of this three variables. Finally, this study analyze the data from the simulation, finding the ways of coefficient adjusting, hoping to improve the performance of in-wheel motor electric vehicle.
Keywords: in-wheel motors, dynamic vibration absorber theory, unsprung mass, vehicle dynamic characteristics
v
目錄
口試委員審定書………...……….ii
誌謝………...iii
摘要... iv
abstract………...v
目錄………...……vi
圖目錄... viii
表目錄... xiii
符號彙整... xiv
第 1 章 緒論... 1
1-1 前言... 1
1-2 文獻回顧 ... 4
1-3 研究動機與目的 ... 7
1-4 研究內容與方法 ... 8
1-5 論文架構 ... 9
第 2 章 理論基礎... 10
2-1 動態減振原理 ... 10
2-1-1 無阻尼動態減振 ... 10
2-1-2 有阻尼動態減振 ... 14
2-1-3 最佳化動態減振 ... 16
2-2 四分之ㄧ車懸吊通用模型 ... 18
2-3 二分之ㄧ車懸吊通用模型 ... 21
vi
2-4 小結... 31
第 3 章 動態模擬條件與環境... 32
3-1 隨機路面系統模擬 ... 32
3-2 舒適性評價 ... 36
3-3 操控性評價 ... 38
第 4 章 輪內馬達懸吊系統運動分析... 40
4-1 參數設定 ... 40
4-2 四分之ㄧ車懸吊系統分析 ... 43
4-2-1 操控性分析 ... 43
4-2-2 舒適性分析 ... 49
4-3 小結 ... 56
第 5 章 電池質量動態減振系統模擬... 57
5-1 四分之ㄧ車懸吊系統運動分析 ... 58
5-1-1 操控性分析 ... 59
5-1-2 舒適性分析 ... 63
5-1-3 小結 ... 66
5-2 電池動態減振系統參數設定探討 ... 67
5-2-1 不同自然頻率 ... 67
5-2-2 不同阻尼比 ... 72
5-2-3 小結 ... 77
5-3 二分之一懸吊系統運動分析 ... 78
5-3-1 四種型態比較 ... 80
5-3-2 電池動態減振系統參數 ... 87
5-3-3 電池動態減振系統配置 ... 91
vii
5-3-4 電池質量………...………...95
5-4 小結 ... 98
第 6 章 總結... 100
6-1 總結 ... 100
6-2 未來展望 ... 103
參考文獻... 104
附錄 A ... 107
viii
圖目錄
圖 1-1 通用汽車輪內馬達運用[1]... 2
圖 1-2 輪內馬達的運用 ... 2
圖 1-3 Bridgestone 的輪內馬達懸吊系統 ... 5
圖 1-4 二自由度與三自由度懸吊系統 ... 6
圖 1-5 二分之一車六自由度振動模型與四分之一車並聯式模型 ... 6
圖 1-6 研究流程 ... 8
圖 2-1 無阻尼動態減振系統 ... 11
圖 2-2 無阻尼動態減振響應圖 ... 12
圖 2-3 1/ω2、2/ω2與 m2/m1關係圖 ... 14
圖 2-4 有阻尼動態減振系統 ... 15
圖 2-5 有阻尼動態減振響應圖 ... 16
圖 2-6 調諧減振系統 ... 17
圖 2-7 二自由度振動模型 ... 18
圖 2-9 四分之ㄧ車三自由度通用模型 ... 19
圖 2-10 二分之ㄧ車分析模型[16]... 21
圖 2-11 二分之一車系統七自由度振動模型 ... 22
圖 2-12 電池質量減振系統位置關係圖 ... 24
圖 3-1 ISO 路面粗糙度圖 ... 34
圖 3-2 ISO 2631 坐姿座標圖 ... 37
圖 3-3 車輪轉向力與輪胎貼地力關係圖 ... 39
圖 4-1 操控性指標三種型態比較 ... 44
圖 4-2 不同次彈簧 K 值操控性分析比較 ... 45
圖 4-3 不同次阻尼 C 值操控性分析比較... 47
ix
x
圖 4-4 貼地力變化二次懸吊最佳參數解(K=26.6kN/m、C=560N/m) ... 48
圖 4-5 簧上加速度三種型態比較 ... 49
圖 4-6 不同次彈簧 K 值簧上加速度頻譜分析 ... 50
圖 4-7 不同次彈簧 K 值簧上加速度 0~30Hz 方均根圖 ... 51
圖 4-8 不同次彈簧 K 值簧上加速度 4~8Hz 方均根圖 ... 51
圖 4-9 不同次阻尼 C 值簧上加速度頻譜分析………..53
圖 4-10 不同次阻尼 C 值簧上加速度方均根圖 ... 53
圖 4-11 簧上加速度二次懸吊最佳參數解 0~30Hz 模擬 ... 54
圖 4-12 簧上加速度二次懸吊最佳參數解 4~8Hz 模擬 ... 55
圖 5-1 兩種模型質量分配關係 ... 58
圖 5-2 簧下質量的轉移函數(H1x1
/
x0)頻譜分析 ... 60圖 5-3 ISO 路面粗糙度 C 級之 PSD 貼地力振幅頻域分析 ... 60
圖 5-4 ISO 路面粗糙度 C 級之 RMS 貼地力振幅時域分析 ... 61
圖 5-5 路面衝擊貼地力 g 值時域變化圖 ... 62
圖 5-6 電池與車體相對位移關係 ... 62
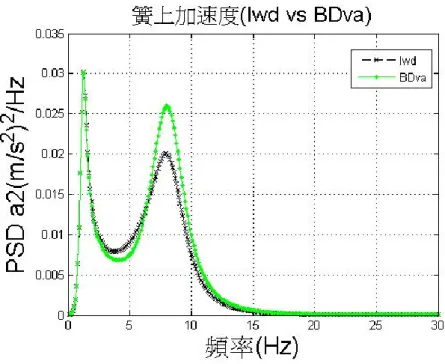
圖 5-7 C 級路面之 PSD 加權後加速度頻譜分析 ... 63
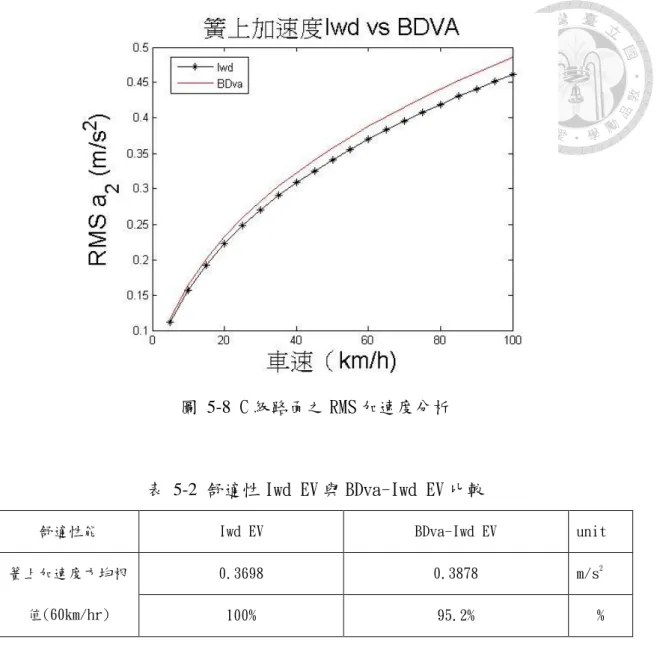
圖 5-8 C 級路面之 RMS 加速度分析 ... 64
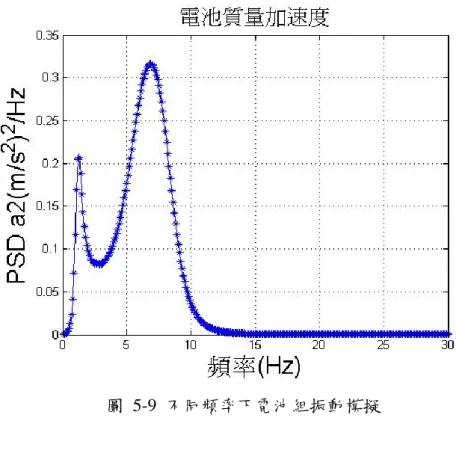
圖 5-9 不同頻率下電池組振動模擬 ... 65
圖 5-10 不同電池減振組自然頻率對簧上質量轉移函數頻譜分析 ... 67
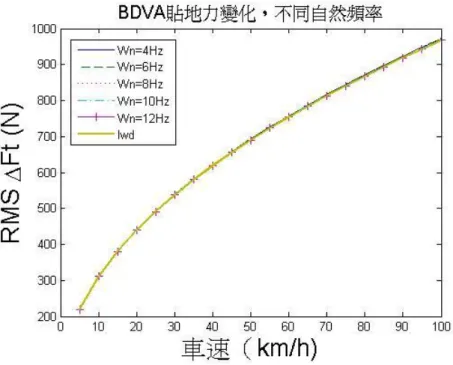
圖 5-11 不同電池減振組自然頻率對貼地力變化頻譜分析 ... 68
圖 5-12 不同電池減振組自然頻率對貼地力變化時域分析 ... 68
圖 5-13 不同電池減振組自然頻率對 30mm 路面衝擊時域變化圖 ... 69
圖 5-14 不同電池減振組自然頻率對簧上加速度頻譜分析 ... 70
圖 5-15 不同電池減振組自然頻率對簧上加速度時域分析 ... 70
圖 5-16 不同電池減振組阻尼比對簧上質量轉移函數頻譜分析 ... 72
xi
圖 5-17 不同電池減振組阻尼比對貼地力變化頻譜分析 ... 73
圖 5-18 不同電池減振組阻尼比對貼地力變化時域分析 ... 73
圖 5-19 不同電池減振組阻尼比對 30mm 路面衝擊時域變化圖 ... 74
圖 5-20 不同電池減振組阻尼比對簧上加速度頻譜分析 ... 75
圖 5-21 不同電池減振組阻尼比對簧上加速度時域分析 ... 75
圖 5-22 不同電池減振組阻尼比之電池組與車身相對位移 ... 76
圖 5-23 四種二分之一車模型重量配置示意圖 ... 79
圖 5-24 行走模式 PSD 簧上加速度頻譜分析 ... 81
圖 5-25 行走模式 RMS 簧上加速度時域分析 ... 82
圖 5-26 行走模式 PSD 俯仰角加速度頻譜分析 ... 82
圖 5-27 行走模式 PSD 貼地力變化頻譜分析 ... 83
圖 5-28 行走模式 PSD 貼地力變化時域分析 ... 84
圖 5-29 跳動模式 PSD 簧上加速度頻譜分析 ... 85
圖 5-30 跳動模式 RMS 簧上加速度時域分析 ... 85
圖 5-31 俯仰模式 PSD 簧上加速度頻譜分析 ... 86
圖 5-32 俯仰模式 PSD 簧上加速度頻譜分析 ... 86
圖 5-33 不同設計參數貼地力變化頻譜 ... 87
圖 5-34 不同減振組自然頻率 PSD 簧上加速度頻譜 ... 88
圖 5-35 不同減振組自然頻率 RMS 簧上加速度時域分析 ... 89
圖 5-36 不同減振組阻尼比 PSD 簧上加速度頻譜 ... 90
圖 5-37 不同減振組阻尼比 RMS 簧上加速度時域分析 ... 91
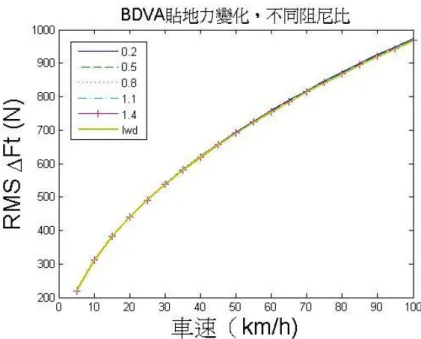
圖 5-38 不同電池組位置 PSD 貼地力變化頻譜圖 ... 92
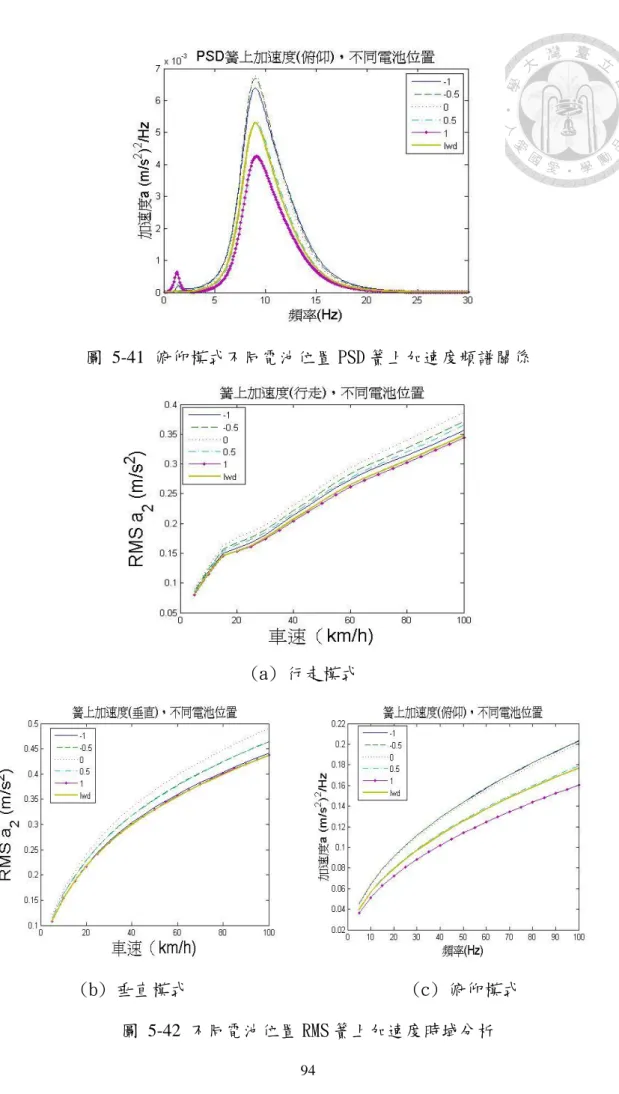
圖 5-39 行走模式不同電池位置 PSD 簧上加速度頻譜關係 ... 93
圖 5-40 垂直模式不同電池位置 PSD 簧上加速度頻譜關係 ... 93
圖 5-41 俯仰模式不同電池位置 PSD 簧上加速度頻譜關係 ... 94
xii
圖 5-42 不同電池位置 RMS 簧上加速度時域分析 ... 94
xiii
表目錄
表 3-1 ISO 路面粗糙度(16) ... 34
表 3-2 加權函數的參數表 ... 37
表 4-1 各懸吊模型參數表 ... 42
表 4-2 次彈簧 K 值操控性分析比較 ... 46
表 4-3 次阻尼 C 值操控性分析比較 ... 47
表 4-4 貼地力變化優化程度比較表………50
表 4-5 次彈簧 K 值舒適性分析比較 ... 51
表 4-6 次阻尼 C 值舒適性分析比較 ... 53
表 4-7 簧上加速度優化程度比較表 ... 55
表 5-1 四分之ㄧ車模型參數設定 ... 59
表 5-2 舒適性 Iwd EV 與 BDva-Iwd EV 比較 ... 64
表 5-3 ISO 12405-2 電池組垂直方向上振動測試條件 ... 65
表 5-4 BDva-Iwd EV 不同減振組自然頻率與 Iwd EV 之操控性比較 ... 69
表 5-5 BDva-Iwd EV 不同減振組自然頻率與 Iwd EV 之舒適性比較 ... 71
表 5-6 BDva-Iwd EV 不同減振組自然頻率電池組與車身相對位移關係 ... 71
表 5-7 BDva-Iwd EV 不同減振組阻尼比與 Iwd EV 之操控性比較 ... 74
表 5-8 BDva-Iwd EV 不同減振組自然頻率與 Iwd EV 之舒適性比較 ... 76
表 5-9 BDva-Iwd EV 不同減振組阻尼比電池組與車身相對位移關係 ... 76
表 5-10 四種二分之一車型態參數表 ... 80
xiv
符號彙整
a
加權後簧上加速度加總m
1~3 四分之一車懸吊系統的質量1~3 1~3 2 4
f r
m
、m
、 、m m
二分之一車懸吊系統的質量c
1~4 四分之一車懸吊系統的阻尼係數1~3 1~3 4
f r
c
、c
、c
二分之一車懸吊系統的阻尼係數k
1~4 四分之一車懸吊系統的彈簧係數1~3 1~3 4
f r
k
、k
、k
二分之一車懸吊系統的彈簧係數s
拉普拉斯轉換符號t
d 前後輪路面輸入時間差t
m 簧下質量轉移比例0~3 0~3 0~3
x 、 x 、 x
四分之一車懸吊系統的質量塊垂直位移、速度、加速度0~3 0~3 0~3
f f f
x
、x
、x
二分之一車前懸吊系統的質量塊垂直位移、速度、加速度0~3 0~3 0~3
r r r
x 、 x 、 x
二分之一車後懸吊系統的質量塊垂直位移、速度、加速度z 懸吊系統的垂直位移矩陣
z
位移的均方根值Ft 輪胎貼地力之變化
v p d
H H
、 、 、H H
系統之轉移函數Ip
車輛俯仰角之轉動慣量Le 車輛前後軸距
L
f 簧上質量重心到前軸的水平距離L
r 簧上質量重心到後軸的水平距離xv
L
4 電池質量到簧上質量重心的水平距離C 阻尼係數矩陣
K
彈簧係數矩陣M
懸吊系統之質量矩陣V 車速
R 、 r
座標轉換矩陣F
g seat t
S
、S
、S
路面、乘座點、貼地力變化的功率密度函數Z
懸吊系統的垂直位移矩陣之拉普拉斯轉換Z
0~3 四分之一車懸吊系統的質量塊垂直位移之拉普拉斯轉換0~3 0~3
f r
Z
、Z
二分之一車懸吊系統的質量塊垂直位移之拉普拉斯轉換Z
seat 二分之一車乘坐點之垂直位移
車輛俯仰角
車輛俯仰角之拉普拉斯轉換
空間角頻率1
第一章 緒論
1-1 前言
二十世紀石油危機以來,人們便意識到不可以過度仰賴石油,而不斷的找 尋新的替代能源。汽車是石油快速消耗的重要原因之一,因此為了要減少汽油 的消耗,業界有許多公司都在致力研發替代能源車,而電動車變成是一個十分 重要的選項,期許未來能夠有效的減少能源問題。引擎車除了會消耗掉許多石 油資源,其燃燒石化燃料時產生大量二氧化碳等氣體會汙染我們寶貴的地球,
相對使得電動車無排汙之優點更受關注,即使當油價回跌讓電失去成本優勢,
但電動車無排汙之特色仍將成為各大國大力推動的主因。大國之中如美國在 2002 年加州空氣資源局通過汽車 CO2 管制法以來,政府開始要介入電動車的發 展,主導方式是由政府限制各項環保與能源標準作為手段,讓車廠把有效降低 車輛污染與提高能源效率課題正式納入主要發展方向,而超低排放、高效率之 電動車更是當中最佳選擇。
國內外從電動車的動力到行車的性能等都有各種不同的研究。例如國外車 廠為因應政策與趨勢,推出許多電動車,如美國 Tesla Roadster、歐洲 Mini E、
Smart Ed、日本 Mitsubishi iMiEV 以及國內 Luxgen EV+等車廠。從這些車廠研 發的車輛當中可發現大多將馬達直接取代引擎,其傳動仍需要變速箱、傳動軸 最後驅動輪胎,傳動過程中將會浪費 10~15%的能量,將這此型的電動車稱為一 般型態的電動車(Conventional Drive Electric Vehicle,Cond EV)。為了提升效率有 部分研究便開始將傳動系統取消直接在車輪配置馬達直接驅動,之後便將此稱 為『輪內馬達』(In-wheel motor or hub motor)。
電動車藉由馬達直接帶動輪胎提供車輛所需的推力,此種模式的電動車在
2
美國通用汽車已有相關的車輛如圖 1-1,Cargo Pick-up concept truck 概念車(圖 1-2 左)、日本則有 SIM-Drive 八輪車(圖 1-2 右),Mitsubishi COLT EV 與 Honda FCX concept,都是利用輪內馬達完成的車輛。這些車輛中特色是動力容易配置不受 傳動機構影響,僅需將電能傳輸至驅動馬達即可,不需考慮傳動軸的配置,相 對之下底盤配置設計更為簡單。
圖 0-1 通用汽車輪內馬達運用[1]
(a) Cargo Pick-up concept truck[1] (b)SIM-Drive [2]
圖 0-2 輪內馬達的運用
車輛以輪內馬達當做獨立驅動系統,發現較一般型態電動車有三項優點:效 率—直驅輪框,減少傳動動能損耗。空間—減少傳動元件的空間讓整車底盤有 更大的運用空間。轉向—左右輪馬達利用動態扭力差控制改變車輛轉向性能。
這些優點可奠定輪內馬達在電動車發展上的一個重要方向。但相對之下也有其 有兩項缺點:簧下質量(unsprung mass)過重—馬達隨功率或扭力增加而增加重 量,且置於輪框導致簧下質量過重,使得在實際行駛中會有舒適性不佳的問題,
以及因輪胎貼地力下降導致行駛穩定性不佳的問題。馬達尺寸受限—輪框內安
3
置馬達,故馬達尺寸受限於輪框尺寸,輪框尺寸同時也受限於簧下質量。
經由以上說明得知,簧下質量會造成車輛動態特性不佳的影響,這個問 題是目前 in-wheel motor car 所面臨的問題之一。然而,車輛懸吊系統之目的 即是希望提供車輛良好的乘坐舒適性與操控穩定性。因此,本文即是希望透 過懸吊系統的研究,以及利用簧上質量電池模擬動態減震,期望藉由此種方 式能改善簧下質量增加所造成的不良影響,以提供車輛應有之乘坐舒適性與 操控穩定性。
4
1-2 文獻回顧
簧下質量對於車輛之乘坐舒適性與貼地性之影響,許早以前就已有學者、
專家對其進行研究,在車輛工程及動力學的相關書籍中亦皆有簡略提及。現 今大多數車廠從事車輛設計開發時,則是以使用輕量化材料或結構簡化之方 式,盡可能減輕簧下質量,增加汽車行駛的乘適性以及操控性。輪內馬達系 統為了直驅不需要變速系統,故特性上造成需要高扭力低轉速的輪內馬達,
此種高扭力馬達重量大多可達 20~50kg,而其馬達主要重量來自於磁鐵與線圈 的電磁系統結構,這些結構笨重且無法輕巧化,也就是說簧下質量無可避免 地會增加 5 成以上的重量。
為因應車輛動力系統導入輪內馬達帶來空間尺寸限制,以及簧下質量過 大造成操控性及乘適性的問題,近年來已經有不少學者以及車場提出實際改 善方案,其大致可以分成三類:1.減輕簧下質量、2.採用主動式懸吊 3.動態減 振系統導入。而其中利用動態減振方式可以轉移較多的簧下質量,而不需要 耗費額外的能源,故動態減振在輪內馬達電動車的應用將會是本研究所要探 討的重點。
動態減振原理(Dynamic vibration absorbers theory)[9]。是在一個振動系統 中將欲減振的頻率設定為減振頻率,再新增一個單自由度振動系統設定原始 共振頻率為前述的減振頻率,加入後兩個振動系統會在減振頻率下發生振動 抵銷,進而提升減振效果。知名輪胎公司普利司通於 2003 年 9 月發布了「普 利司通動態減震器型輪內馬達系統(Bridgestone dynamic-damper type in-wheel motor system)」如圖 1-3。此系統是由 Go Nagaya 等工程師因應輪內馬達驅動 系統發展了「先進動態減震機構(advanced dynamic-damper mechanism)」[6]。
將電動馬達透過一組彈簧與減震器安裝於車軸上,並使馬達相對車軸動作進 行反向運動,以獲得動態減震器的作用。經由研究分析與實驗結果發現,此
5
減震機構可改善輪內馬達增加簧下質量所導致對車輛乘坐舒適性與操控穩定 性之影響,減少了簧下質量共振頻率附近的輪胎受力變化,提供車輪與路面 良好的接觸性,並減緩簧上質量之振動,改善了車輛乘適品質。H. Fukuda 等 人在 1969~1990 年[7]~[11]運用動態減振原理,在原始車輛主懸吊系統的二 自由度(圖 1-4a)新增一個單自由度振動系統,變成三自由度並聯式懸吊(圖 1-4b),這個新增單自由度系統稱為第二懸吊。H. Ghoneim 等人[10]研究得知,
當簧下質量增加影響輪胎跳動情況下,增加第二懸吊可以有效的壓致著輪胎 的跳動,達到良好的減振效果,提昇操控性,並間接降低簧上質量加速度。
D. Hrovat 於 1988 年的四分之一車模型下最佳化主動式懸吊的研究中[4],在 主動式的雙自由度懸吊下加入被動式第二懸吊,與原始二自由度無第二懸吊 的懸吊系統比較,相同的簧上加速度方均根值時,輪胎跳動減少 83%。又將 被動式第二懸吊,與主動式第二懸吊比較,發現可以再降低 35%的輪胎彈跳。
綜合前述,動態減振理論下的第二懸吊系統可以提供優秀的壓抑輪胎跳動效 果,並以有實際的模型應用。
圖 1-3 Bridgestone 的輪內馬達懸吊系統[6]
6
(a)二自由度模型[5] (b)三自由度串並聯模型[8]
圖 0-4 二自由度與三自由度懸吊系統
在 2010 年之後,相繼有 R.VOS 等人[12]~[15]利用質量轉移的概念解決簧下 質量過重的問題。梁誌明[13]針對四分之一車三自由度模型與二分之一車六自由 度模型如圖 1-5,分別就不同種動態減震型態作探討分析,並利用次系統功能圖,
拓樸分析出較可能實現的機構行式,最後提出並聯式的懸吊系統為其較可行的 方案。
Xf1 Xr1
Xf3 Xr3
Xf0 Xr3
X2 Φ Le Lf
kf1
kf2
kf3 kr3
kf3
kr1
m2
mf1
mf3 mr3
mr1
cf2
cf3
cf1 cr1
cr3
cr2 kf4 cf4 cr4 kr4
m
1m
3m
2(a)二分之一車模型 (b)四分之一車模型 圖 0-5 二分之一車六自由度振動模型與四分之一車並聯式模型
在文獻探討當中,動態減震原理的應用是將輪內馬達視為減震質量,再對 該減震質量相關配置對車體的乘適性以及操控性影響研究,分為頻域和時域探 討,並找尋較佳的設計方法。本研究將先針對第二懸吊阻尼器以及彈簧,做最 佳化分析,而後再利用車身上的電池質量,試探討如將動態減震原理也應用在 電池質量上,對車體的乘適性與操控性是否也會有所優化。
7
1-3 研究動機與目的
輪內馬達為現今電動車主要發展趨勢之一,其優點在於動力可以直接傳遞 到輪胎上,不需要經過額外的傳動機構,所以能夠有效的提升能源使用效率。
但是在車輛動態分析上,輪內馬達會造成車體簧下質量過重,造成舒適性與操 控性下降,影響車輛整體動態表現。對於簧下質量過重的問題,主要有兩個問 題解決方向,第一為減少簧下質量,第二為加入動態減振系統。雖然在文獻中 已有紀載許多有關於動態減振系統的研究,但是大多是在簧下加入減振系統,
並無利用簧上多出的質量(電池)做減振系統,故本研究希望能將簧下質量減振系 統優化,並探討簧上質量減振系統對車輛動態的影響。
本論文第一部分在不改變原始懸吊系統之下,加入二次懸吊系統,將過多 的簧下質量轉移成減振質量,形成輪內馬達二次懸吊電動車(Motor Dynamic vibration absorber of In-Wheel Drive Electric Vehicle,MDva-Iwd EV)。輪內馬達二 次懸吊電動車有兩個重要的變數,分別為二次懸吊的彈簧彈性係數與阻尼值,
本研究目的在找到兩變數對舒適性與操控性最佳解,使車輛動態優化。第二部 分則是加入電池質量減振系統,將電池質量當作避震質量塊,行成電池動態減 振電動車(Battery Dynamic vibration absorber of In-Wheel Drive Electric
Vehicle,BDva-Iwd EV)。此部分的目的為探討電池質量減振系統的效應,並找出 此系統設計與調整的基本規則。
8
1-4 研究內容與方法
圖 1-6 為本論文的研究流程圖,首先會閱覽過去的文獻資料,了解在建立車 體懸吊模型時有哪些不同的參數會影響我們探討的目標值,確認後即開始著手 建立模型。本研究的目的為改善輪內馬達造成簧下質量過重的問題,故會建立 兩種不同的通用模型來探討分析,分別為四分之ㄧ車模型與二分之ㄧ車模型。
四分之ㄧ車模型會用來進行兩個部份的研究,一是接續著梁誌明[13]的論文討論,
找尋最佳的二次懸吊彈簧阻尼值,二是模擬電池質量減振系統,觀察該系統的 特性以及系統彈簧及阻尼值改變後如何影響目標值,最後再進行數據整理分析。
二分之ㄧ車模型的部分則會針對電池質量減振系統進行討論,在不同的電池擺 放位置之下,會如何影響舒適性和操控性,最後在進行數據整理分析並尋求電 池質量減振系統的設計與調整基本規則。
文獻回顧
理論基礎與車輛模型參數確認
四分之一車 通用模型建立
二分之一車 通用模型建立
二分之一車 電池質量減振系統
模擬驗證 四分之一車
輪內馬達懸吊參數 最佳化
四分之一車 電池質量減振系統
模擬驗證
模型參數計算 模型參數計算
數據整理分析
圖 1-6 研究流程
9
1-5 論文架構
論文共分六個章節,各章節內容如下所述:
第一章 緒論
介紹本論文的研究背景,回顧歷年相關的文獻並說明研究動機與目的。
第二章 理論基礎
本章節內容包含動態減振理論介紹,並利用牛頓力學基礎建立四分之ㄧ車 三自由度簡化模型與二分之ㄧ車七自由度簡化模型。
第三章 路況輸入
本章節介紹第二章推出的數學模型其輸入訊號,依照國際標準組織之定義,
一般使用隨機振動的方式來表示一般路面的輸入,最後再介紹人體加速度加權 函數以及車輛振動指標。
第四章 輪內馬達電動車懸吊參數對車輛動態特性影響
針對輪內馬達減振系統於設計上的主要參數如懸吊彈簧係數、減震阻尼係 數進行不同參數變化之分析,並探討其對於車輛動態特性的影響。最後在不改 變原懸吊值的狀況下,對輪內馬達懸吊阻尼係數與彈性係數做最佳化。
第五章 電池質量減振系統運動分析
應用動態減振理論所推出的電池質量減振系統,會在此章節做二分之ㄧ車 以及四分之ㄧ車的模擬分析。對其減振系統設計參數,如系統自然頻率、阻尼 比等進行參數討論。此外,在二分之ㄧ車數值模型上還會分析不同電池擺放位 置對車輛動態特性的影響。
第六章 總結與未來方向
討論分析本論文研究結果,並提出未來發展方向以及建議。
10
第二章 理論基礎
本章首先介紹動態減振理論,再來推導車輛數學模型,分為四分之ㄧ車通 用模型與二分之一車通用模型。當馬達放置於輪框內時,稱做輪內馬達,而輪 內馬達的優點在於能夠直接傳遞能量,不需要傳動機構因此能減少能量損失,
但是輪內馬達的最大缺點就是會使汽車簧下質量增加,導致的問題如車輛舒適 性下降,輪胎的彈跳增加使得操控性不佳等等。這些問題將會由推導出來的數 學模型進行模擬,以數值的方式評論各參數對舒適性與操控性的影響。
2-1 動態減振原理
由於本研究重點在於將動態減振原理用在輪內馬達系統以及電池動態減 振系統,因此透過了解動態減振原理,可以更清楚了解到該原理將如何應用 到車子上,減振頻率、阻尼比該如何設定能降低目標主體的激頻振福,或使 激發的頻率避開共振頻率。根據謝志誠[25]的研究,本小節將介紹有阻尼動態 減振系統與無阻尼動態減振系統作以及較佳化減振系統。
2-1-1 無阻尼動態減振
當一個物體受到外力而產生振動時,刺激的振動頻率如果接近物體的自然 頻率,將會產生共振,造成整個物體劇烈震動,甚至會崩壞。為了要減少物體 的共振效應,我們將引進一套自然頻率與物體自然頻率相同的動態減振系統,
用來使激發的頻率避開共振頻率。
11
圖 2-1 無阻尼動態減振系統
圖 2-1 為簡化的振動模型,此系統振動主體為 m1,以彈簧係數 k1的彈簧 固定為一端,減振質量為 m2,以彈簧係數 k2的彈簧與主體相連接,形成一減振 系統,其系統動態方程式為(2.1)。
1 1 1 1 2 1 2 0
2 2 2 2 1
( ) sin ( ) 0
m x k x k x x F t m x k x x
(2.1) 輸入為一正弦波訊號,可假設此諧波解為式(2.2),代入(2.1)中求解,其質量 m1、m2的穩態振幅 X1、X2可以表示為式(2.3)與式(2.4)。( ) sin 1, 2
j j
x t X t j
(2.2)2
2 2 0
1 2 2 2
1 2 1 2 2 2
( - )
= ( )( )
k m F
X k k m k m k
(2.3)2 0
2 2 2 2
1 2 1 2 2 2
=( )( )
X k F
k k m k m k
(2.4) 為了要使目標主體 m1的振幅縮至為零,我們假設 X1=0,也就是分子的部分 為零,如式(2.5)。我們的目標在使振動頻率避開主體自然頻率,故我們假設在未 加入減振質量 m2前,主體所受外力頻率為ω2ω
12=k1/m1,則減振系統可以被設
m2
12
計為式(2.6)。
2 2
2
=
k
m
(2.5) 2 2 12 1
=
k k
m m
(2.6)我們可以定義δst=F0/k1,ω1=(k1/m1)1/2 為主體的系統自然振頻,ω2=(k2/m2)1/2
為減振系統的自然振頻。此時式(2.3)、式(2.4)可以改寫為式(2.7)、(2.8),並依照 式(2.7)做出圖 2-2 無阻尼動態減振系統響應。
2
1 2
2 2
2 2
1 1 2 1
1 ( ) [1 ( ) ][1 ( ) ]
st
X
k k
k k
(2.7)
2
2 2
2 2
1 1 2 1
1
[1 ( ) ][1 ( ) ]
st
X
k k
k k
(2.8)
圖 2-2 無阻尼動態減振響應圖
圖 2-2 y 軸表示主體振幅與輸入振幅比,x 軸表示輸入頻率與主體自然頻率 比。兩個凸起的峰值與結合後系統的兩個振頻有關係。當 X1=0 時,ω與ω1比 為 1,換句話說ω=ω1=ω2,代入式(2.8)可以改寫成式(2.9)
13
2 1 0
2 2
st
F X k
k k
(2.9)式(2.9)有一物理意義,顯示減振質量的彈簧施以主體一相反之力 k2X2=-F0, 此力平衡掉外力,使主體位移 X1減至零。從圖 2-2 也可以看出動態減振系統雖 然會消減掉激頻ω,但仍會有兩個共振頻率1,2產生。我們可以利用式(2.10) 與式(2.11)求得1和2與減振系統頻率ω2的關係,如式(2.12)。
2 2 2 1 2 2 2
1 1 1 1 1 1
( )
k k m m m
k m m k m
(2.10)4 2 2 2 2 2 2
2 1 2 1 1
( ) ( ) ( ) 1 (1
m
)( ) 1 0m
(2.11)
2 2 2
1 1
2 2 2 1/ 2
1 2 2 2
2 1 1 1
2 2 2 2
2 1
[1 + (1 + )( ) ] ( ) {[1 + (1 + )( ) ] 4( )}
2( ) ( )
m m m m
(2.12)
圖 2-2 可以看出,只有在單一刺激頻率ω=ω1的情況下振幅為零,而當輸入 頻率高於或低於ω1的時候,便有可能跑到兩個系統共振頻率1和2。其頻率比
1/ω2和2/ω2與質量比 m2/m1的關係如圖 2-3 所示。14
圖 2-3 1/ω2、2/ω2與 m2/m1關係圖
2-1-2 有阻尼動態減振
前一小節我們介紹無阻尼動態減振,本章節將在動態減振系統上面再加上 一組阻尼器,藉此將主體的自然頻率轉移成兩個共振頻率,並使其共振頻率的 峰值降低。圖 2-4 為此簡化模型示意圖,式(2.13)為有阻尼減振系統的動態方程 式。
15
圖 2-4 有阻尼動態減振系統
1 1 1 1 2 1 2 2 1 2 0
2 2 2 2 1 2 2 1
( ) ( ) sin ( ) ( ) 0
m x k x k x x c x x F t m x k x x c x x
(2.13) 令式(2.14)為解的形式,代入動態方程式後求解可得穩態解為式(2.15)( ) i t 1, 2
j j
x t X e
j
(2.14)2
2 2 2 0
1 2 2 2 2 2
1 1 2 2 2 2 2 1 1 2
1 2 2
2 2
2 2 2
( )
[( )( ) ] ( )
( )
( )
k m ic F
X k m k m m k i c k m m
X k i c
X k m i c
(2.15)
其中我們定義下列各參數的意義,推得其振幅大小比值為式(2.16)、(2.17)
=
c
1 /c
c
阻尼比值0/ 1
st
F k
系統輸入振幅2 / 1
f
減振系統自然頻率與主體自然頻率比值/ 1
g
外力頻率與主體自然頻率比值2 1
=
m
/m
減振質量與主體質量比值F
0sinωt
16
2 2 2 2 1/2
1
2 2 2 2 2 2 2 2 2 2
(2 ) ( )
(2 ) ( 1 ) [ ( 1)( )]
st
X g g f
g g g f g g g f
(2.16)2 4 1/2 2
2 2 2 2 2 2 2 2 2 2
(2 )
(2 ) ( 1 ) [ ( 1)( )]
st
X g f
g g g f g g g f
(2.17)在 f=1 與 μ=0.05 時,對式 2.16 作圖,表示|X1/δst|與外力振頻比
g
/ 1的關係。如圖 2-5 所示。
圖 2-5 有阻尼動態減振響應圖
當阻尼比無窮大時 ζ=∞,C2值為無窮大,此時可以將減振質量與主體質量 相連接,也就是可將此系統是為一總質量為 m1+m2=(21/20)m1彈簧係數為 k1的 單一自由度系統,當共振發生時 X1→∞,g=ω/ω1=1/ 1+
=0.976。若阻尼值 為零時ζ=0,將呈現無阻尼動態減振系統的兩個峰值共振型態,如圖 2-5 所示。此圖也表示我們可以在 C2=0 與 C2=∞之間找到一個適當的值,使系統的振幅峰 值達到最小。
2-1-3 最佳化動態減振
由圖 2-5 可以看出不論 ζ 值為何,都會通過點 A、B。這兩個位置的值,可 以將ζ=0、ζ=∞代入到式(2.16)化簡而得出式(2.18)。
17
2 2 2
4 2 1 2
2 ( ) 0
2 2
f f f
g g
(2.18) 式(2.18)可以得出兩根g
A、g
B,代入式(2.16)中可分別求得兩座標 A、B,而 最有效率的減振系統為當 A=B 時出現,此情況可已表示成式(2.19)。當質量比 μ=1/20,減振系統自然振頻與主體自然振頻比滿足式(2.19)時,其|X1/δst|與外力振 頻比g
/ 1的關係關係如圖 2-6 所示,此時稱為調諧減振系統。調諧減振系 統尚未得到最佳的阻尼比ζ 和對應的|X1/δst|,當 A 與 B 點峰值愈平坦時愈好得到 最佳的ζ。1
f
1
(2.19)圖 2-6 調諧減振系統
為得到最佳化的ζ 值,我們先將式(2.19)代入式(2.16),再將其對 g 作微分以找到 曲線 X1/δst的斜率,最後再設定 A、B 點斜率為零,即可得到式(2.20)、(2.21)
A: 3 (3- )
= 2
8(1 )
A
(2.20)B: B2 3 (3+ )
= 2
8(1 )
(2.21)18
兩式平均以後,可得最佳阻尼比為式(2.22),而其所對應的 X1/δst較佳值為式(2.23)
3
3 8(1 )
optimal
(2.22)1 2
( )optimal 1
st
X
(2.23)2-2 四分之ㄧ車懸吊通用模型
四分之ㄧ車懸吊可以探討單一車輪的運動性質,二自由度懸吊模型為最簡 單的車輛動態分析模型,包括主懸吊彈簧阻尼與輪胎車身等元件,如圖 2-7 所示。
而本小節我們所推導的模型為三自由度懸吊通用模型,其中懸吊模型裡包括主 懸吊彈簧、主懸吊阻尼、副懸吊彈簧、副懸吊阻尼、輪胎、車身、減振質量等 元件,用來探討當各種不同的垂直振動輸入時,各項原件的運動變化。四分之 ㄧ車模型通常分為簧上質量(sprung mass) m2與簧下質量(unsprung mass) m1 以及輪胎減振系統與主懸吊減振系統。此模型有許多的線性假設,EX:兩組彈簧 與阻尼皆為線性變化,各元件質量不隨著運動狀態改變且皆成線性變化,輪胎 與地面貼第力恆為正,此假設成立之下則可為此模型建立二階線性微分方程 式。
m
1m
2
m
1m
2m
3圖 2-7 二自由度振動模型 圖 2-8 三自由度振動模型
文獻[13]中提到四分之ㄧ車三自由度模型分為簧上質量、減振質量、簧下質
19
量三個部分。簧上質量一般包含四分之ㄧ車身、部分懸吊架質量等;簧下質 量包含輪圈、輪胎、部分懸吊架質量等,而減振質量為馬達以及減振懸吊機 構組。四分之一通用三自由度模型配置如圖 2-9 所表示。
m
1m
2m
3X
1X
3X
0k
2k
3c
2c
3X
2k
4c
4k
1c
1圖 2-9 四分之ㄧ車三自由度通用模型 (m1:簧下質量,m2:簧上質量,m3:減振質量)
當模擬輪內馬達懸吊系統時,m1、m2、m3分別為簧下質量、簧上質量、減振質 量,四組減振系統分別為 k1~k4、c1~c4,而在模擬電池減振系統時,m1、m2、 m3則分別表示簧下質量,電池質量以及四分之ㄧ車體質量。路面、質量 m1、質 量 m2、質量 m3絕對位移為 X0、X1、X2、X3,速度為x0、x1、x2、x3、x3,加 速度為x0、x1、x2、x3。各質量、彈簧係數與阻尼係數經簡化皆是為固定值,
不隨著時間運動型態而變化。對圖 2-9 進行動力分析後可以得式(2.24)、( 2.25)、
( 2.26)。
1 1 1 1 0 1 1 0 2 1 2
2 1 2 3 1 3 3 1 3
( ) ( ) ( )
( ) ( ) ( ) 0
m x c x x k x x c x x
k x x c x x k x x
(2.24)2 2 2
(
1 2)
2(
1 2)
4(
3 2)
4(
3 2) 0
m x c x x k x x c x x k x x
(2.25)3 3 3
(
1 3)
3(
1 3)
4(
3 2)
4(
3 2) 0
m x c x x k x x c x x k x x
(2.26) 令位移z=
x1 x2 x3
T,式(2.24)~式(2.26)可整理成式如下式20
1 1 2 3 2 3
2 2 2 4 4
3 3 4 3 4
1 2 3 2 3 1 0 1 0
2 2 4 4
3 4 3 4
0 0
0 0 z+ z
0 0
+ z= 0
+ 0
m c c c c c
m c c c c
m c c c c
k k k k k k x c x
k k k k
k k k k
(2.27)
整理成 MCK(3x3)矩陣方程式為
Mz+Cz+Kz=
k x1 0c x1 00 0
T1
3*3 2
3
0 0
0 0
0 0
m
M m
m
1 2 3 2 3
3 * 3 2 2 4 4
3 4 3 4
c c c c c
C c c c c
c c c c
1 2 3 2 3
3*3 2 2 4 4
3 4 3 4
k k k k k
K k k k k
k k k k
(2.28)
為了要在頻域上面做分析,將式(2.28) 經過拉普拉斯轉換後,將此方程式由 時域轉為頻域。令輸出為
Z L z
( )、輸入Z
0 L x
( )0 ,將式(2.28)進行轉換得式 (2.29)。1 1
2
(M ) 0 Z
00 k c s s Cs K Z
(2.29)
將式(2.29)整理成 Z=H(s)Z0的型式,如式(2.30),且令 H(s)為轉移函數。
1 1
2 1
3 1
(M ) 0 Z
00 k c s Z
s Cs K
(2.30)
1 1
2 1
H
3 1(M ) 0
0 k c s s Cs K
(2.31)
本研究將使用四分之ㄧ車通用模型模擬三自由度並聯式輪內懸吊系統以及 電池質量減振系統。當模擬並聯式輪內懸吊系統時,令 k4、c4為零,即可求得 其轉移函數。當探討電池質量減振系統時,我們令 k2、c2為零即可求轉移函數。
21
2-3 二分之ㄧ車通用模型
一般常見的二分之ㄧ車俯仰車輛模型,為將車輛簡化成車身與前後兩個懸 吊系統雙自由度運動模型[16~17],此模型與四分之ㄧ車模型的差別在於,二分 之ㄧ車除了可以分析車身之跳動行為外(bouncing),更增加了車身俯仰角(pitch angle)的觀察,如圖 2-10 所示。而本篇論文針對輪內馬達二次懸吊電動車與電池 質量動態減振電動車設計出一套二分之ㄧ車通用模型,如圖 2.11 所示,並在此 章節進行推導,後續章節帶入參數模擬討論。將四分之一車的通用三自由度懸 吊運用在前後輪,簧上質量(m2)前後垂直運動自由度變為對重心的垂直位移(x2) 以及俯仰角(ϕ)自由度,再加上一電池質量動態減振系統,故總自由度變為七個 自由度系統。此二分之ㄧ車通用模型有兩個假設,一為前後輪的振動形式為線 性運動,二為假設簧上質量重心 m2的俯仰角變化極小,故tan
sin
。 當m
f3 m
r3
0時,為一般電動車或輪內馬達電動車;而具有前輪或後輪輪內馬達二次懸吊系統,前輪驅動的話mr3
0
,後輪驅動為m
f3
0。電池質量動 態減振系統與簧上質量重心的距離為 l4,當要配置此系統時m 設定為電池質量,
4 無此系統時m
4=0。圖 2-10 二分之ㄧ車分析模型[16]
22
X
f1X
r1X
f3X
r3X
f0X
r3X
2k
f1k
f3k
r3k
r1m
2m
f1m
r3m
r1c
f2c
f3c
f1c
r1c
r3c
r2Le
L
4Φ
m
f3m
4k
4c
4X
4L
rL
fk
f2k
r2圖 2-11 二分之一車系統七自由度振動模型
0 , 0:
f r
x x
前、後輪地面絕對垂直位移,向上為正(unit:m)1 , 1:
f r
x x
前、後輪簧下質量絕對垂直位移,向上為正(unit:m)2 , 2:
f r
x x
前、後絕對垂直位移,向上為正(unit:m)3 , 3:
f r
x x
前、後輪動態減振質量絕對垂直位移,向上為正(unit:m)4:
x
r 電池動態減振質量絕對垂直位移,向上為正(unit:m)2
:
x 簧上質量重心絕對垂直位移,向上為正(unit:m)
:簧上質量俯仰角 ccw 為正(pitch angle)(unit:rad)1 , 1:
f r
m m
前、後輪簧下質量(unit:kg)2
:
m 簧上質量(unit:kg)
23
:
Ip
簧上對重心的俯仰角質量慣性矩(unit:kg-m2)3 , 3:
f r
m m
前、後輪動態減振質量(unit:kg)1 , 1:
f r
k k
前、後輪胎彈簧係數(unit:N/m)2 , 2:
f r
k k
前、後主懸吊彈簧係數(unit:N/m)3 , 3:
f r
k k
前、後第二懸吊彈簧係數(unit:N/m)4:
k
電池動態減振系統懸吊彈簧係數(unit:N/m)1 , 1:
f r
c c
前、後輪胎阻尼係數(unit:N/(m/s))2 , 2:
f r
c c
前、後主懸吊阻尼係數(unit:N/(m/s))3 , 3:
f r
c c
前、後第二懸吊阻尼係數(unit:N/(m/s))f :
c
電池動態減振系統懸吊阻尼係數(unit:N/(m/s)), f , , r 4:
Le L L L 前後軸距長,簧上質量重心到前輪軸距離,簧上質量重心到後
輪軸,電池減振質量到簧上質量重心距離 (unit:m)
對簧上質量(車身)受力分析,得到前後輪系統以及電池質量減振系統給車身 在垂直與俯仰方向的運動方程式。再將前後輪簧下質量以及減振質量的運動方 程式與以建立,透過座標轉換將得到具有簧上重心的位移以及俯仰角,最後可 得 MCK 矩陣化運動方程式。下面實施運動方程式推導,前、後主懸吊以及電池 質量減振系統給車身質量施力分別為
f
f、 、 如下f
rf
42 2 1 2 2 1
2 2 1 2 2 1
4 4 2 2 4 4 2 2 4
( ) ( )
( ) ( )
( ) ( )
f f f f f f f
r r r r r r r
f r f r
f k x x c x x
f k x x c x x
f k Ax Bx X c Ax Bx x
(2.32)
電池質量減振系統給車身的力與該系統所在的位置有關,不同的電池配置位置 會造成不同的彈簧與阻尼壓縮量,在垂直方向與俯仰方向產生不一樣的力與力
24
矩。上列
f 相關計算如下所示。
4X2 X4v Xr2
m4電池與m2接點
l4
lr
圖 2-12 電池質量減振系統位置關係圖
圖 2-12 為電池質量配置圖,可以看出電池質量與車身質心的水平距離為 l4,X4v 為電池減振組與車身的接點。依照幾何關係推算,當 l4>0 也就是電池配置於車 身質心後方時, X4v如式(2.33)所示;當 l4<0 也就是電池配置於車身質心前方時,
X4v如式(2.34)所示。
l4>0
X
4v
K(x
r2 x
2) x
2 (2.33) l4<0X
4v K( x
f2 x
2) x
2 (2.34) 係數:K= | |
4r
l
l
又利用幾何位移關係,可以將前後懸吊的位移
x
f2、x
r2轉換成簧上重心垂直位移 與俯仰角。2 2
2 2 2
2 4 4
2 4
( )
: = = -
f r
r f
f r
f f f
r
f r e f
e e
x x L L x ax bx
L m L m L L
a L b L L L L
L L m m
係數
(2.35)
將式(2.33)、式(2.34)中的