LECTURE 2
SAMPLED DATA ANALYSIS
LECTURE 2 - SAMPLED DATA ANALYSIS
• Sampling
• Shannon’s Sampling Theory
• Aliasing (Frequency folding)
• Zero-Order-Hold
WHAT IS SAMPLING?
• A continuous-time signal is replaced by a discrete sequence of
numbers that represents the signal value at certain (usually equally spaced) time intervals.
• A microprocessor based controller measures the physical process at discrete sample times and transmits new control signals at
discrete sampling times— sampled systems.
What is Sampling?
• A continuous-time signal is replaced by a discrete
sequence of numbers that represents the signal value at certain (usually equally spaced) time intervals.
• A microprocessor based controller measures the
physical process at discrete sample times and transmits new control signals at discrete sampling times—
sampled systems.
0 T 2T 3T 4T 5T
x(t)
x(t)
Samplex(kT) = x*(t)
x*A sequence of number
x*(t) :
sampled signalEFFECT OF SAMPLING
• “Sampling” creates certain effects that need to be understood.
• It is also important to understand whether it is possible, and if so how to reconstruct a continuous signal from its sampled data.
ME561 Lecture2- 3
Effect of Sampling
• “Sampling” creates certain effects that need to be understood.
• It is also important to understand whether it is
possible, and if so how to reconstruct a continuous signal from its sampled data.
0 T 2T 3T 4T 5T
x(t) reconstruct
x(t)
x(kT)
0 T 2T 3T 4T 5T
A SIMPLE LOOK AT ALIASING A Simple Look at Aliasing…
• Sampling frequency needs to be fast enough…
(Ex2_1)
0 0.5 1 1.5 2
-1.5 -1 -0.5 0 0.5 1 1.5
Time
Signal Amplitude
Orignal Signal Sampled Signal
-1 -0.5 0 0.5 1 1.5
Signal Amplitude
Original Signal Sampled Signal "o"
sampled Signal "x"
Twice as fast as the signal is fast enough?
WHAT IS SAMPLING
ME561 Lecture2- 5
What is Sampling? (revisit)
Mathematical representation of sampling
—the continuous-time signal is modulated with a train of (uniformly spaced) impulses
Taking periodic samples from a continuous-time signal x(t) to produce a sampled signal x(kT).
δ T δ
k
t t kT
( ) = ( − )
=−∞
∑
∞a train of impulses
CHARACTERISTICS OF IMPULSE FUNCTIONS Characteristics of Impulse Functions
• A time function with unitary area, with growing amplitude and shrinking duration.
• When it is multiplied to another time function
• Also known as the
Dirac Delta Function– Paul Dirac (1902- 1984), English physicists
δ τ τ ( )
d( )
tt
=
z
−∞1
f t ( ) ( δ − t a dt ) = f a ( )
−∞
z
∞The shifting property, true for all functions continuous at t=a.
L
δ ( )
t= δ τ ( )
e−sτ⋅
dτ =
−∞
z
∞1
( ) 0 when t t 0 & ( ) t dt 1 (Area = 1)
δ
∞δ
= ≠ ∫
−∞=
SAMPLE OF A CONTINUOUS FUNCTION
ME561 Lecture2- 7
Sampling of a Continuous Function
* ( ) ( )
T( ) ( ) ( )
k
x t x t δ t
∞x t δ t kT
=−∞
= ⋅ = ∑ −
Sampled signal
Continuous-time
signal Impulse train
0 T 2T 3T 4T 5T
x*
0 T 2T 3T 4T 5T
x(t)
⊗
⊗
0 T 2T 3T 4T 5T
δT Impulse Train
( ) ( )
T
k k
t t kT
δ =∞ δ
=
∑
=−∞ −• The sampling process can be interpreted as an amplitude
modulation (AM) process, where the C.T. signal x(t) is modulated by a carrier signal
δ
T(t) with a carrier frequencyω
S = 2π
/ T rad/sec, i.e.LAPLACE TRANSFORM OF SAMPLED SIGNAL Laplace Transform of Sampled Signal
By definition
X *( ) s = x *( ) t = x *( ) ⋅ e d
−s−∞
z
∞L τ
ττ
* ( ) ( ) ( )
( ) ( ) ( )
s k
s skT
k k
X s x kT e d
x e kT d x kT e
τ
τ
τ δ τ τ
τ δ τ τ
∞ ∞ −
−∞ =−∞
∞ ∞ − ∞ −
=−∞ −∞ =−∞
= − ⋅
= ⋅ − =
∫ ∑
∑ ∫ ∑
Define z e =
Ts( ) *( ) ( )
kTs( )
kk k
X z X s
∞x kT e
− ∞x kT z
−=−∞ =−∞
= = ∑ ⋅ = ∑ ⋅
The
“z-transform”
SIMPLE USAGE OF Z-TRANSFORM
• Given X(kT), find X(z)
• Given X(z), find X(kT)
X(z) = X*(s) = ∑
∞k=−∞
x(kT) ⋅ e
−kTs= ∑
∞k=−∞
x(kT) ⋅ Z
−kFREQUENCY INTERPRETATION OF SAMPLING Frequency Domain Interpretation of Sampling
Since δ
T(t) is periodic => can be represented by Fourier series
δ(t kT) C e
k
N
j T N t N
− = ⋅
=−∞
∞ F
HG I KJ
=−∞
∑ ∑
∞ 2πwhere C
Nare the Fourier coefficients
C
NT e
j T N tdt
T
T t kT
k
=
−⋅
=−∞
∑
∞ −F HG I KJ
z
−1
22
2 δ( )
π
T t e dt
T
j T N t T
=
T⋅
−F =
HG I KJ
z
−1
21
2
2
δ( )
π
δ (t kT )
T e
k
j T N t N
− =
=−∞
∞
F
HG I KJ
=−∞
∑
1∑
∞ 2πME561 Lecture2- 11
Frequency Domain Interpretation of Sampling(cont.)
Define the sampling frequency as (rad/sec)
ω S = 2π TX s x t x e d
e d
x e d x
T e d
T x e e d
T x e d
s
s
s s
j N s
s jN
x t kT
t kT e
k
k
j N N
N
N
S
S
S
*( ) *( ) *( )
( ) ( )
( ) ( )
( ) ( )
( )
= = ⋅
= ⋅
= L
NM O
QP ⋅ = L
NM O
QP ⋅
= ⋅ ⋅
⋅
−
−∞
∞
−
−∞
∞
−
−∞
∞ −
−∞
∞
−
−∞
∞
− −
−∞
∞
z z
z z
z z
−
−
=
=−∞
∞
=−∞
∞
=−∞
∞
=−∞
∞
=−∞
∞
∑
∑ ∑
∑
L
τ τ
τ
τ τ τ τ
τ τ
τ τ
τ
τ
τ τ
ω τ τ
ω τ
τ δ
δ
1
ω τ1 1
a f b g
b g
∑
X s
T X s jN S
N
*( ) = ( − )
=−∞
∑
∞1 ω
where X(s) is the Laplace
transform of x(t)
Frequency Domain Interpretation of Sampling(cont.)
ω X(jω)
1
ω0 -ω0
H(j
ω)
T x(t)
X(jω) x*(kT)
X*(jω) xR(t)
XR (jω)
ω0
-ω0 ωS
-ωS
1/T
X*(jω)
(ωS – ω0) ω
H(jω)
T
ωC -ωC
ω XR(jω)
1
ω0 -ω0
X s
T X s jN S
N
*( ) = ( − )
=−∞
∑
∞1 ω
The frequency content is duplicated and created at multiple of The sampling frequency . There is a gain of 1/T due to sampling.
ωS = 2π T
Ideal
Frequency Domain Interpretation of Sampling(cont.)
ω X(jω)
1
ω0 -ω0
H(j
ω)
T x(t)
X(jω) x*(kT)
X*(jω) xR(t)
XR (jω)
ω0
-ω0 ωS
-ωS
1/T
X*(jω)
(ωS – ω0) ω
H(jω)
T
ωC -ωC
ω XR(jω)
1
ω0 -ω0
X s
T X s jN S
N
*( ) = ( − )
=−∞
∑
∞1 ω
The frequency content is duplicated and created at multiple of The sampling frequency . There is a gain of 1/T due to sampling.
ωS = 2π T
Ideal
ME561 Lecture2- 13
Problem When ω
S< 2 ω
0ω X(jω)
1
ω0
-ω0 -2ωS -ωS 0 ωS 2ωS
××
2π/Tω0
-ω0 ωS
-ωS
1/T
X*(jω)
(ωS – ω0) ωS /2
ωS > 2ω0
1/T
X*(jω)
(ωS – ω0) ωS -ωS
-2ωS 2ωS
ωS < 2ω0
To reconstruct the (frequency content of the) original signal, a
necessary (but perhaps not sufficient) condition is that ω
S> 2ω
0SHANNON’S SAMPLING THEORY
• B.S. in EE & MATH, UMICH, 1932
• M.S. in EE, MIT, 1937
• “A Symbolic Analysis of Relay and Switching Circuits”
• The paper was a landmark in that it helped to
change digital circuit design from an art to a science
• Ph.D. in EE, MIT, 1940
• “An Algebra for Theoretical Genetics”
• Bell Labs & MIT
SAMPLING THEORY
ME561 Lecture2- 14
Shannon's Sampling Theorem
• (Sampling) Given a continuous-time band-limited signal x(t) with X(j ω)=0 for , x(t) can be uniquely determined by its samples x*(t) = x(kT), where k = 0,
±1, ±2, , if the sampling frequency ω
S> 2 ω
0Where
(Reconstruction) Given the sampled signal x*(t) = x(kT), x(t) can be reconstructed by processing x*(t) through an ideal low pass filter with cutoff frequency greater than ω
0and less than ( ω
S− ω
0) and a gain T in the pass band and 0 in the blocked region. The continuous-time signal can be computed from the sampled signal by the interpolation formula
ω ω >
0ω
S= 2π T
x t x kT
t kT t kT
S
k S
( ) ( )
sin ( )
( )
=
L
−NM O
−
QP
=−∞
∑
∞ω
ω 2
2
ME561 Lecture2- 14
Shannon's Sampling Theorem
• (Sampling) Given a continuous-time band-limited signal x(t) with X(jω)=0 for , x(t) can be uniquely determined by its samples x*(t) = x(kT), where k = 0,
±1, ±2, , if the sampling frequency ωS > 2ω0 Where
(Reconstruction) Given the sampled signal x*(t) = x(kT), x(t) can be reconstructed by processing x*(t) through an ideal low pass filter with cutoff frequency greater than ω0 and less than (ωS − ω0) and a gain T in the pass band and 0 in the blocked region. The continuous-time signal can be computed from the sampled signal by the interpolation formula
ω ω> 0
ωS
= 2Tπ
x t x kT
t kT t kT
S
k S
( ) ( )
sin ( )
( )
=
L
−NM O
−
QP
=−∞
∑∞
ω
ω 2
2
Proof of Shannon's Sampling Theorem
• The proof for the first half (sampling) of the sampling theorem has been sketched out in previous
discussions.
• We only need to figure out the “reconstruction” part
ω X(jω)
1
ω0 -ω0
H(j ω)
T x(t)
X(jω) x*(kT)
X*(jω) xR(t)
XR (jω)
ω0
-ω0 ωS
-ωS
1/T
X*(jω)
(ωS – ω0) ω
H(jω)
T
ωC -ωC
ω XR(jω)
1
ω0 -ω0
ME561 Lecture2- 16
Proof of Shannon's Sampling Theorem
H(jω)
T
ωC -ωC
H j T
SS
( ω ) ω ω
= ω ω <
RS >
T 0 for for 2 2
Ideal low pass filter (with a gain of T)
Sampled signal frequency
X j T X j
R
S S
( ) *( )
ω ω ω ω
= ⋅ ω ω <
RS >
T 0 for for 2 2
If the ideal low pass filter is used, we have, between [- ω
S/2. ω
S/2], X
R(j ω)=X(jω).
• Reconstruction with an ideal low-pass filter H(j ω ):
Perfect reconstr
( ) ( ) uction ! ! !
x t
Rx t
⇒ =
Proof of Shannon's Sampling Theorem (cont.)
2 2
( )
2 2
( ) 2
2 ( )
2
2
( ) 1 ( ) ( )
2 2
1 1
( ) ( )
( )
( )
sin 2
( ) (
( )
2
S S
S S
S S
S
S
j kT j t j t kT
k k
j t kT j t kT
k k
S S
S
k S
x t T x kT e e d T x kT e d
x kT e d x kT e
j t kT t kT
x kT x k
t kT
ω ω ω ω ω
ω ω
ω ω
ω ω
ω ω
ω ω
ω ω ω
ω ω
∞ ∞
− −
− −
=−∞ =−∞
∞ ∞ −
−
=−∞ − =−∞ −
∞
=−∞
= π ⋅ ⋅ ⋅ = π ⋅
= = ⋅
−
−
= − =
∑ ∑
∫ ∫
∑ ∫ ∑
∑ ) sinc
S( 2 )
k
T
ω
t kT∞
=−∞
−
⋅
∑
x t x t X j e d
T X j e d
R R
j t
j t
S S
( ) ( ) ( )
* ( )
= = ⋅
= ⋅ ⋅
−∞
∞
−
z z
1 2 1
2
22
π π
ω ω
ω ω
ω
ω
ω ω
sin( )
sinc( ) x
x =
Proof of Shannon's Sampling Theorem (cont.)
2 2 ( )
2 2
( ) 2
2 ( )
2
2
( ) 1 ( ) ( )
2 2
1 1
( ) ( )
( )
( )
sin 2
( ) (
( )
2
S S
S S
S S
S
S
j kT j t j t kT
k k
j t kT j t kT
k k
S S
S
k S
x t T x kT e e d T x kT e d
x kT e d x kT e
j t kT t kT
x kT x k
t kT
ω ω ω ω ω
ω ω
ω ω
ω ω
ω ω
ω ω
ω ω ω
ω ω
∞ ∞
− −
− −
=−∞ =−∞
∞ ∞ −
−
=−∞ − =−∞ −
∞
=−∞
= π ⋅ ⋅ ⋅ = π ⋅
= = ⋅
−
−
= − =
∑ ∑
∫ ∫
∑ ∫ ∑
∑
) sinc S ( 2 )k
T ω t kT
∞
=−∞
−
⋅
∑
x t x t X j e d
T X j e d
R R
j t
j t
S S
( ) ( ) ( )
* ( )
= = ⋅
= ⋅ ⋅
−∞
∞
−
z z
1 2 1
2
22
π π
ω ω
ω ω
ω
ω
ω ω
sin( )
sinc( ) x
x =
OBSERVATIONS
ME561 Lecture2- 18
Observations
The frequency ω
N= ω
S/ 2 plays an important role in the sampling process. This frequency is called the Nyquist Frequency.
The reconstruction is only valid for signals that contains no frequency components higher than the Nyquist frequency ω
N= ω
S/ 2.
ω0
-ω0 ωS
-ωS
1/T
X*(jω)
(ωS – ω0) ωS /2
ωS > 2ω0
1/T
X*(jω)
(ωS – ω0) ωS -ωS
-2ωS 2ωS
ωS < 2ω0
OBSERVATIONS Observations
• To achieve perfect reconstruction of the original signal at a specific time t*,
⇒ we will need all values of x(kT), past, present and future ! May be OK for some signal processing applications,
however, its not very practical for control applications …
( ( * )
( *) ) sinc
2
R S
k
t kT x
t k
x
∞T ω
=−∞
−
= ∑ ⋅
ME561 Lecture2- 20
Ex2_2 Direct Implementation of SST
x t x kT
t kT t kT
S
k S
( ) ( )
sin ( )
( )
=
L
−NM O
−
QP
=−∞
∑
∞ω
ω 2
2
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-0.2 0 0.2 0.4 0.6 0.8 1 1.2
Time (sec)
Amplitude Original Signal
Reconstructed Signal Sampled Signal
Why the lag?
sampled signal did not contain values before t = 0 and only has finite terms.
ALIASING Aliasing
• When the condition ω
S> 2 ω
0( ω
N> ω
0) is violated, the frequency content in the sampled data will be contaminated .
1/T
X*(jω)
(ωS – ω0) ωS -ωS
-2ωS 2ωS
ωS < 2ω0
The frequency components are copied, created and added
to the (true) low-frequency point.
ME561 Lecture2- 22
Aliasing (cont.)
X T X N
s*( ) ω = b g 1 ∑
∞N=−∞( ω − ω ) The frequency content of X*( ω) contains not only
that of X( ω), but also X(ω − ω
S), X( ω + ω
S), X( ω − 2ω
S), X( ω + 2ω
S), ...
Consider only positive frequencies, the spectrum at frequency ω actually includes (is the alias of) all the spectral components at ω, ω
S− ω, ω
S+ ω, 2ω
S− ω , 2ω
S+ ω, ... etc., where ω < ω
N.
Mathematically
ω = |(ω + ω N ) mod (ω S ) − ω N |
ALIASING
Aliasing (cont.)
• Graphical interpretation
• Mathematically,
ω = ( ω
1+ ω
N) mod( ω
S) − ω
NωN ωS 3ωN 2ωS
ωN
Actual Frequency
Sampled Frequency
ω
ω
(ωS − ω ) (ωS + ω ) (2ωS − ω )
ME561 Lecture2- 24
Ex2_1
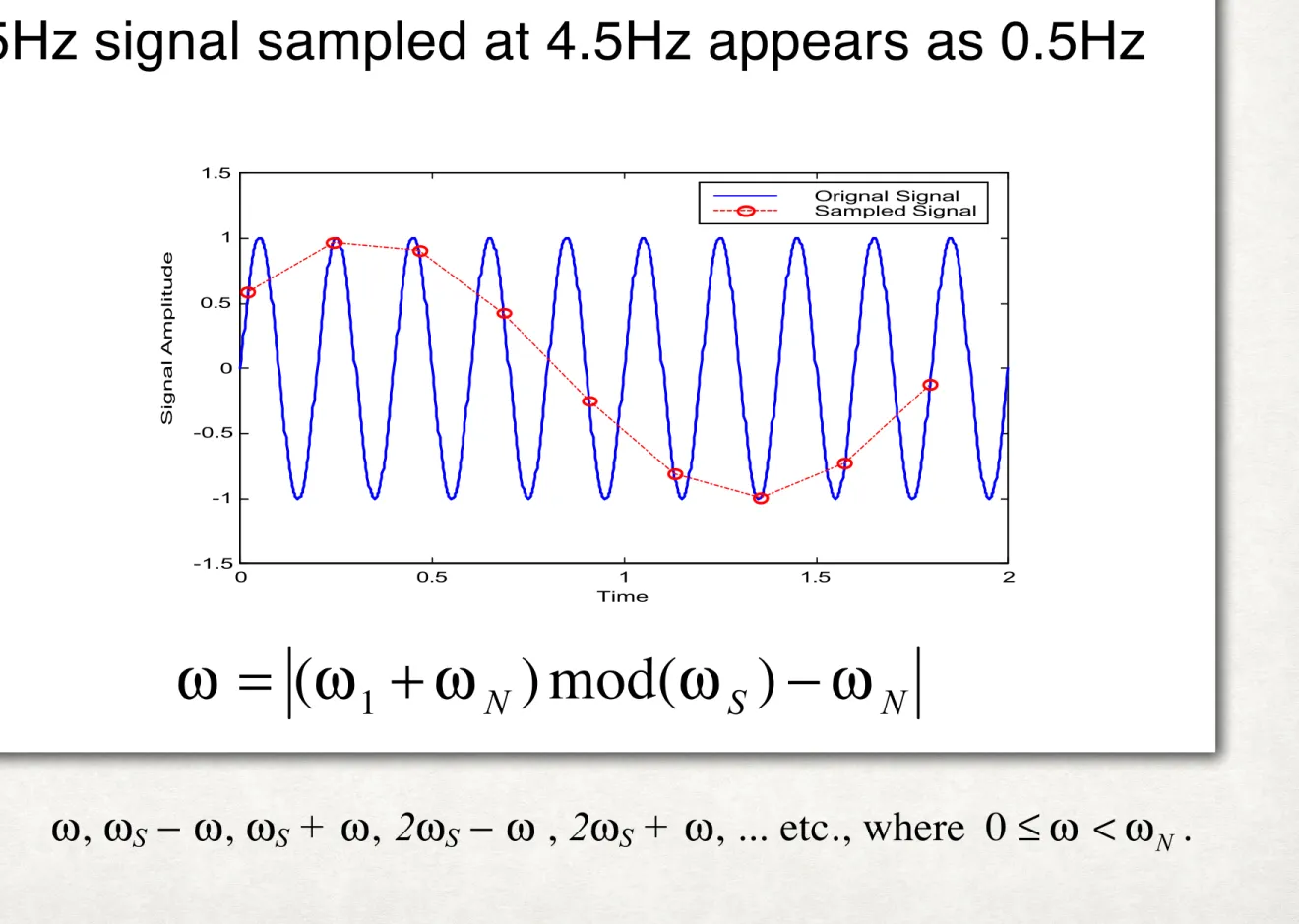
• 5Hz signal sampled at 4.5Hz appears as 0.5Hz
0 0.5 1 1.5 2
-1.5 -1 -0.5 0 0.5 1 1.5
Time
Signal Amplitude
Orignal Signal Sampled Signal
ω = ( ω
1+ ω
N) mod( ω
S) − ω
NME561 FALL 2001
H. Peng and George T.-C Chiu ©1994- 2001 SAMPLING – 9
0 0.1 0.2 0.3 0.4 0.5
-0.2 0 0.2 0.4 0.6 0.8 1 1.2
T i m e ( s e c )
Amplitude O r i g i n a l S i g n a l
R e c o n s t r u c t e d S i g n a l S a m p l e d S i g n a l
Figure 2.8 Signal Reconstruction
The result is illustrated in Figure 2.8. Note that the reconstructed signal is lagging behind the original signal. The reason is that the sampled signal did not contain values before t = 0 and only has finite terms. The interpolation formula is based on infinite series with both past and future samples available.
2 2 . . 3 3 A A l l i i a a s s i i n n g g
Shannon’s sampling theorem assumes that the continuous-time signal does not contain high frequency components outside the window (-ω0 , ω0 ) and the sampling time T is small enough that ωN = π T > ω 0 . When this assumption fails to hold, a phenomenon called aliasing will occur, which is illustrated in Figure 2.6.
When aliasing occurs, the original signal cannot be reconstructed even when the ideal low- pass filter H(jω) is used. From Eq. (2.5), if we treat the spectrum of X*(jω) as a function of ω, Eq.
(2.5) can be written as X *( )ω =
b g
1 T∑
N∞=−∞ X (ω − Nωs). Therefore, the frequency content of X*(ω) contains not only that of X(ω), but also X(ω − ωS), X(ω + ωS), X(ω − 2ωS), X(ω + 2ωS), ...Since negative frequency components are used only for mathematics reasons, it is customary to consider only positive frequencies. The spectrum at frequency ω actually includes (is the alias of) all the spectral components in ω, ωS − ω, ωS + ω, 2ωS − ω , 2ωS + ω, ... etc., where 0 ≤ ω < ωN . After sampling, a frequency thus cannot be distinguished from its alias. In general, a frequency component ω1 (ω1 > ωN ) appears as a low frequency component ω (ω < ωN ) after sampling, where
ω = (ω ω1 + N ) mod(ω S ) − ωN (2.9)
and all the frequencies are of the same units, rad/sec or Hz. Figure 2.9 shows a graph of the sampled frequency ω, in Eq. (2.9), versus the actual frequency.
Ex2_3 Example on Aliasing
• For a sampling time T = 0.2 seconds (5 Hz). Three sinusoidal signals (1Hz, 4Hz, and 6Hz) appear to be identical (as 1Hz, or rad/sec), since
ω
S− ω = 5Hz − 1Hz = 4Hz ω
S+ ω = 5Hz + 1Hz = 6Hz
-1 -0.5 0 0.5
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Time (sec)
Signal
6Hz
4Hz
ME561 Lecture2- 26
Ex2_4 Noise Aliasing
• Suppose you are trying to measure the acceleration of a vehicle, which has a limited bandwidth of 1.1Hz. If you select a sampling rate f
S= 11Hz (10 times faster than the system bandwidth), a noise of 700Hz (due to, say, the alternator) will appear as a 4Hz component.
ω = ( ω
1+ ω
N) mod( ω
S) − ω
N|(700+5.5)mod(11)-5.5| = 4.0
ANTI-ALIASING FILTERING Anti-Aliasing Filtering
• When a sampling rate ω
Sis selected, it is implied that none of the frequency components larger than
ω
N, are of interest, since they cannot be reconstructed from the sampled data.
• Need to filter these components out to avoid contamination (aliasing, frequency folding).
• This anti-aliasing filter bandwidth is usually
selected to be higher than ω
N, but low enough to filter out major noise components.
Some important facts:
ME561 Lecture2- 28
Effects of Anti-Aliasing Filter
• The most significant effect due to anti-aliasing filter is the degradation of closed-loop phase margin.
Computer D/A
F(s) A/D
Anti-Aliasing Filter
G(s)
Plant
ZERO ORDER OF HOLD (ZOH) Zero Order Hold (ZOH)
• Zero order hold is a simple alternative (of SST) to
produce continuous-time signal from discrete-time
(sampled) signal.
SST - HARD TO IMPLEMENT
ME561 Lecture2- 30
SST—Hard To Implement
• SST
• Impulse response of the ideal low-pass filter:
x t x kT
t kT t kT
S
k S
( ) ( )
sin ( )
( )
=
L
−NM O
−
QP
=−∞
∑
∞ω
ω 2
2
-5 -4 -3 -2 -1 0 1 2 3 4 5
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Normalized Time ( t / T )
Impulse Response
h t H j e d
T e d T e
jt
T
jt e e
t T t T
j t
j t T
T j t
T T
j t T j t T
( ) ( )
sin
= ⋅
= ⋅ = ⋅ = ⋅ −
=
F HG I KJ
−∞
∞
− −
−
z z
1 2
1
2 2 2
π
π π π
π π
π π
π π
π π
ω ω
ω
ω
ω ω
b g b g
e j
Non-causal—impossible to implement for time signals
ZOH ZOH
f t ( ) = f kT ( ) for kT ≤ < t ( k + 1 ) T Unit Impulse Response
X s x t t t T
s s e e s
R R
sT
sT
( ) = ( ) = ( ) − ( − )
= −
= −
−
−
L L 1 L 1
1 1 1
G
ZOH(jω)
X*(jω)x*(kT)xR(t) XR (jω)
Time 0
1
Time 0
1
T
G s e
ZOH
s
sT
( ) = − 1
−0 Time 1
T
FREQUENCY RESPONSE OF ZOH
ME561 Lecture2- 32
Frequency Response of ZOH
G j e
j
e e e
j T
T
T e
ZOH
j T j T j T j T j T
( )
sin
ω ω ω
ω ω
ω ω ω ω ω
= − = − =
F HG I KJ
⋅− − − −
1 2
2
2 2 2 1
a f
2G s e
ZOH s
sT
( ) = −1 −
( )
( )
sin 2 ( )
2
( ) sin 2
2
ZOH
ZOH
G j T T
T
G j T T
ω ω
ω
ω ω ω
=
∠ = − + ∠
ME561 Lecture2- 33
Frequency Response of ZOH (cont.)
GZOH T
0.637T
ωN ωS 2ωS 3ωS ω ωS 2ωS 3ωS 0°
–180°
–360°
–540°
–720°
–900°
∠GZOH
ωN ωS 2ωS 3ωS 0
–20
– 40
– 60
G ZOH dB
∠G ZOH
ω (rad/sec) 0°
–180°
–360°
–540°
–720°
–900°
ZOH V.S. IDEAL LOW PASS FILTER ZOH vs. Ideal Low Pass Filter
Hidden oscillation
ME561 Lecture2- 35
ZOH vs. FOH
[ ]
( ) ( ) t KT ( ) (( 1) ) for ( 1)
f t f kT f kT f k T kT t k T
T
= + − − − ≤ < +
ZOH FOH
Astrom and Wittenmark