Volume 10, 1, March 2005, pp. 1-14
空載雷射掃描資料於推估樹冠高度之應用
詹進發
1摘要
森林生態系經營有賴於詳實之林分結構資訊,傳統地面調查需耗費大量人力、物力、經費與時間,
不易獲得迅速且正確之資訊。空載雷射掃描儀具有高密度測點與穿透樹冠間隙之特性,可迅速獲取林分 之三度空間資料,適合用於林分結構相關資料之蒐集。本研究利用以 Leica ALS40 掃描陽明山地區所獲取 之空載雷射掃描資料,產生林分數值表面模型,進而以林分數值表面模型與數值高程模型之差推估樹冠 高度模型,並與 11 個地面樣區實測樹高比較,以評估其準確度。結果顯示以 LIDAR 資料估測樹冠高度普 遍有低估之現象,若能提高數值表面模型與數值地形模型之精度,應可建立較準確之樹冠高度推估模式。
關鍵詞:空載雷射掃描、樹冠高度、數值表面模型、數值高程模型
1. 前言
遙測技術應用於林業已有多年,其應用範圍 如:自然資源調查、病蟲害調查、森林火災調查、
野生動物棲息地調查、生物量之推估、植生綠度分 析、植群生態變遷、生態環境變遷監測等。近年來 遙測技術發展迅速,遙測影像的光譜解像力與空間 解像力均提高甚多,例如:HYDICE(Hyperspectral Digital Imagery Collection Experiment) 、 AVIRIS(Airborne Visible/Infrared Imaging Spectrometer) 、 CASI(Compact Airborne Spectrographic Imager)之影像資料均超過兩百個光 譜波段,IKONOS 衛星影像之空間解像力可達一公 尺,QuickBird 衛星影像更提昇至約 61 公分的空間 解像力,使得遙測技術對不同地物之辨識能力大為 增加,更大幅提昇遙測技術之實用性。遙測技術有
許多優點,然而地形遮蔽與天候之影響,亦使其應 用受到限制。此外,由於多光譜影像對於植生覆蓋 之穿透能力不佳,因此無法直接測得林分結構,其 他如林分材積、生物量等森林資源重要資訊,也僅 能藉由模式間接推估。
空載雷射掃描(LIDAR,LIght Detection And
Ranging)與 RADAR (RAdio Detection And Ranging)
均屬主動式(active)遙測技術,兩者之最主要的差別 在於其掃描時所發射出之電磁波的頻率高低,RADAR 利用較長波長之電磁波對地面進行掃 描,而LIDAR 則是利用較短波長之電磁波。由於 LIDAR 遙測技術具有高解像力與穿透能力,因此 在國外不同學術研究領域均普遍受到重視,相關研 究成果極為豐碩,例如:Kaufman et al.(2003)利用 LIDAR 和其他主動式空間遙測系統重建粗、細氣
1國立政治大學地政學系助理教授
收到日期:民國 93 年 09 月 10 日 修改日期:民國 93 年 10 月 19 日 接受日期:民國 93 年 10 月 22 日
航測及遙測學刊 第十卷 第一期 民國 94 年 3 月 2
溶膠之垂直剖面;Babichenko et al. (2001)以 LIDAR 研 究 海 洋 中 有 機 體 之 三 度 空 間 分 布 ;Cracknell (1999) 指 出 遙 測 技 術 包 括 高 光 譜 影 像 、 SAR 、 LIDAR 均可有效監測河口及濱海區域;Utkin et al.
(2002)利用 LIDAR 偵測森林火災;Davenport et al.
(2000)以 LIDAR 推估農田中作物之高度,藉以改 善預測鳥類族群之模式;St-Onge and Achaichia (2001)結合 LIDAR 與航空攝影以量測林分高度;
Smith et al. (2002)提出利用 LIDAR 與 SAR 對森林 中每木直徑估計的比較;Lefsky et al.(2001)評估多 種遙測系統應用在美西花旗松純林之森林調查、監 測及繪圖。有鑒於LIDAR 之優異測量能力,美國 航空及太空總署(NASA, National Aeronautics and Space Administration) 積 極 推 動 VCL(Vegetation Canopy Lidar)衛星遙測計畫,其目標為藉由裝置在 距地表400 公里軌道的衛星上之 LIDAR 系統偵測 地球之三度空間結構,尤其是植群之垂直與水平結 構,以及地表之地形(Blair et al., 1999)。
國內有關LIDAR 之研究尚屬起步階段,2002 年四月間農委會引進LIDAR 進行九二一地震災區 形變測量,採用兩套不同的商業化系統重複作業,
一為Optech ALTM 2033 儀器,另一為 Leica ALS40 儀器。兩次作業測得的雷射測點地面平面解析度大 部 分 區 域 優 於 1m , LIDAR 測 高 成 果 與 地 面 GPS-RTK 測量之檢核點比較,均方根誤差小於 12cm (史天元、彭淼祥,2002)。以往因缺乏資料,
而使LIDAR 之相關研究停滯不前,在引進 LIDAR 技術之後,已有以LIDAR 資料進行研究之成果陸 續發表,如邵怡誠、陳良健(2003)應用 LIDAR 資 料於DTM 生產及房屋偵測;史天元、彭淼祥(2003b) 將空載雷射掃描之成果與航空測量數據高程精度 進行比較;陳良健等(2003)結合 LIDAR 資料與數 位空照影像建立三維建物區塊;王淼等(2003)提出 LIDAR 點雲資料的處理方法,以萃取出隱含於資 料中的平面資訊。
樹冠高度為林分結構之重要參數,由雷射點雲 資料可分離出地面點與非地面點,常用的方法可粗 分 為 兩 類 , 一 為 利 用 統 計 方 式 濾 波(statistical filter) , 另 一 為 形 態 學 方 式 濾 波 (morphological filter)。大部分的濾波皆假設利用空載雷射掃描系 統所得三維點雲中最低點為地表回波,此假設於都 市、開闊地或是疏林地大致成立,但於密林地時其 反 射 訊 號 極 有 可 能 來 自 於 下 層 植 被(understory vegetation),使得地表高程被高估,因此,於密林 區樹高有普遍低估的情形(Næsset, 1997)。Sithole and Vosselman (2003)比較用於分類空載雷射點雲 資料之八種演算法,發現多數演算法在地景較單純 時表現良好,對於較複雜之地景則仍有一些困難。
本文主要目的乃在於探討LIDAR 技術之特性,以 及如何利用 LIDAR 資料產生數值表面模型(DSM, Digital Surface Model) 與 數 值 高 程 模 型 (DEM, Digital Elevation Model),據以推估樹冠高度,並與 地面實測樹高比較,以評估其準確度。
2. 研究材料與方法
2.1 研究試區概述
本研究試區位於陽明山國家公園內,海拔高度 分布自200 m 至 1120 m,氣候類型屬亞熱帶氣候 區與溫帶氣候區。陽明山國家公園成立於 1985 年,以大屯火山群為主體,總面積約11455 公頃,
地質構造多屬安山岩,特殊的火山地形與地質為本 區獨特之地形景觀資源。由於受緯度、海拔、地質 與東北季風之影響,本區之植物景觀極為豐富,大 致可分為水生、草原及森林植被三大類,除了亞熱 帶雨林、暖溫帶常綠闊葉林與山脊矮草原等不同的 植物帶外,亦可見到通常分布於中央山脈海拔二千 五百公尺以上的高山植物,維管束植物種類超過
1200 種,種類繁多的植群也孕育了多樣化的動物 群落。植物相主要為天然闊葉樹混合林、芒草原、
矢竹林與人工造林等,闊葉林以樟科植物為主,如 紅楠、大葉楠等,另有多種特有或稀有植物(陽明 山國家公園,2004)。
2.2 研究材料
2.2.1 空載雷射掃描資料
行政院農業委員會於2002 年引進空載雷射掃 描技術,委由交通大學執行空載雷射掃描儀資料獲 取計畫,利用Optech ALTM 2033 與 Leica ALS40 雷射掃描系統獲取包括九二一地震災區、新竹地 區、陽明山等地之資料(史天元、彭淼祥,2002、
2003a)。本研究所使用之資料為 2002 年 4 月 14 日 利用Leica ALS40 掃描陽明山地區所獲得之資料,
涵蓋範圍如圖1 所示,覆蓋面積約 57 km2 (5.4 km x 10.5 km)。圖中顯示掃描範圍裡有許多地方並未獲 得資料,此乃由於掃描作業進行時陽明山地區有濃 厚雲層覆蓋所致。
Leica ALS40 系統主要包括雷射掃描儀(laser scanner)與載具方位記錄系統(aircraft position and orientation system, POS),藉由全球定位系統(GPS) 量測載具之空間位置(latitude, longitude, altitude),
慣性量測系統(inertial measurement unit, IMU)記錄 載具姿態(roll, pitch, heading),以及量測掃描儀與 地面的距離與掃描角度,便可解算反射雷射脈衝之 地面點的三維空間座標(Leica Geosystems, 2002),
Leica ALS40 之 主 要 規 格 如 表 1 所 示 (Leica Geosystems, 2002;史天元、彭淼祥,2002)。
空載雷射掃描資料包括測點之E、N、H 座標 及反射強度值I,其座標系統為 TWD97,其高程值 為橢球高,全部掃描點資料共計22,734,756 點,去 除無資料之部分後,掃描資料點密度約為 0.62
pts/m2,資料檔案約812 MB。此外,本研究另取得 以商業軟體TerraScan 將原始資料分類後所獲得之 地面(ground)與覆蓋面(surface)資料,雷射掃描作業 之飛航參數與資料檔詳如表2。
2.2.2 圖籍資料與地面樣區 調查資料
為檢核雷射掃描資料之估測成果,本研究另取 得多項圖籍資料包括:數值高程模型、衛星影像 (QuickBird, SPOT)、正射影像(1:5000)、地形圖 (1:1000)、行政區界圖、控制點圖與地面樣區調查 資料等,為陳永寬等(2003)執行台北市加速保安林 檢訂管理計畫之研究成果,主要供判釋土地覆蓋類 型、座標校正與比較LIDAR 之測量成果。數值高 程模型由台北市政府提供,網格大小為 4 m × 4 m,由於資料量十分龐大,僅切取與 LIDAR 資料 涵蓋範圍重疊之數值高程模型供分析使用。地面樣 區面積大小為 0.01 公頃,樣區之中心位置以 GPS 衛星定位儀配合全測站測量其座標,每一樣區均詳 細調查胸高直徑(DBH, diameter at breast height)大 於5 cm 之林木株數、樹種、胸高直徑、樹高,由 調查人員填寫於調查記錄表中。
2.2.3 軟硬體設備
本研究所使用的系統平台為安裝 Microsoft Windows 2000/XP 之一般個人電腦,軟體系統包 括:ESRI (Environmental Systems Research Institute) 所研發之地理資訊系統ArcGIS、PCI Geomatics 所 研發之遙測影像處理軟體Geomatica、SAS 統計分 析軟體。圖形資料之格式轉換、處理、分析與展示 均 使 用 ARC/INFO 提 供 之 AML (Arc Macro Language),及以 C 程式語言自行開發之軟體工具。
航測及遙測學刊 第十卷 第一期 民國 94 年 3 月 4
圖 1. 陽明山地區空載雷射掃描資料涵蓋範圍圖
表 1. Leica ALS40 主要系統規格(Leica Geosystems, 2002;史天元、彭淼祥,2002)
表 2. 雷射掃描作業之飛航參數與資料檔 飛航航高 1200-2200 m (AGL)
掃描角度 35°
掃描頻率 29.4 Hz
脈衝頻率 38 KHz
全部掃描點 22,734,756 (812 MB) 地面點 1,686,303 (60 MB) 覆蓋面點 15,892,054 (580 MB)
點密度 0.62 pts/m2
最大雷射脈衝頻率 45 KHz
雷射波長 1.064 μm
最大雷射掃描頻率 70 Hz
掃描角度 10-75°
作業航高 500-3000 m (AGL)
水平精度 15-75 cm
高程精度 15-50 cm
多重目標 每一脈衝最多可記錄五個反射訊號
工作溫度 0-35°
環境溼度 10-90%
2.3 研究方法
2.3.1 圖籍資料處理
本研究所取得之圖籍資料原為TWD67 座標,為 便於與LIDAR 資料比較與套疊分析,需將所有圖籍 資料轉換成TWD97 座標。台北市政府所提供之 4 m 解析度DEM 高程為正高,除座標轉換之外,尚需將 正高轉換為橢球高。第一步先將圖形資料之點位座 標轉換成文字檔,並保留其屬性資料。其次利用內 政部提供之「台灣地區大地基準及座標系統轉換計 算 程 式 (MTWDCON, Modified TaiWan Datum CONversion program)」,將點位資料轉換成 TWD97 座標,然後將點位資料與屬性資料匯入ArcGIS 空間 資料庫以產生具有TWD97 座標之圖檔,並建立位相 (topology)關係。圖籍資料之格式轉換與座標轉換,
均利用AML 與 C 語言撰寫軟體,將其處理過程自動 化。
衛 星 影 像 主 要 供 判 釋 研 究 區 域 土 地 覆 蓋 類 型,QuickBird 影像原為 UTM 座標系統,本研究以 PCI Geomatica OrthoEngine 模組將影像做正射糾正 (Orthorectification),並轉換為 TWD97 座標系統,影 像空間解析度為黑白0.7 m,彩色 2.8 m。
2.3.2 樹冠高度模型(canopy height model, CHM)推估
欲從空載雷射掃描獲取之龐大的離散三維點雲 資料中獲取樹冠高度模型,必須先於其中分離出地 面點及非地面點如:植被、建物等,並進一步內插 使成為常用等間距之網格(Grid)形式或是不規則三 角網(TIN, Triangulated Irregular Network),進而建立 有效之DEM 與 DSM,兩者之差距即可供推估樹冠 高度模型。
由表 2 可知陽明山地區之雷射掃描資料分類所
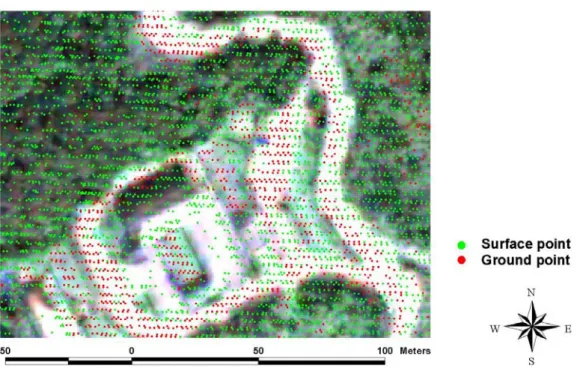
獲得之地面資料點數量遠小於覆蓋面資料點數,此 乃由於研究試區之植被茂密,雷射光束難以直接到 達地面所致。將雷射點雲資料與衛星影像套疊(圖 2、
圖 3),亦可證實地面點多發生於建物、裸露地或植 被稀疏之處。由於推估樹高需有地面高程資料,既 有之地面點顯然不足以涵蓋所有研究範圍,因此需 先設法推估全面之地面高程。為利於與 4m 解析度 之DEM 套疊運算與比較,所有由雷射掃描資料所產 生之網格式資料均轉換成與 DEM 具有相同網格大 小與座標原點。本研究採用兩種方法推估全面地面 高程,其一為先以LIDAR 地面點建立不規則三角網 (LIDAR_TIN),然後計算每一 4 m × 4 m 網格中心點 座標,將此座標值與LIDAR_TIN 以線性內差法推算 與該點相對應之地面高程值。另一種方法為從所有 點雲資料中找出落於4 m × 4 m 網格之點,以高程最 低者為其地面高程,此方法所得到之地面高程在密 林區可以預期會有較大偏差。由於LIDAR 地面點涵 蓋不足,若據以產生數值高程模型,恐難獲得精確 之成果,因此本文另以既有之4m × 4m 數值地形模 型 代 表 地 面 高 程 , 並 據 以 建 立 不 規 則 三 角 網 (DEM4M_TIN)。為求得樹高,由離散覆蓋面點之平 面座標與 DEM4M_TIN 及 LIDAR_TIN 以線性內差 法推算與該點相對應之地面高程值,覆蓋面點之高 程減去相對應之地面高程,即可得到樹高。此外,
並求出落於4m × 4m 網格之所有雷射掃描點的最大 高程值,將其減去地面高程,即可得到規則網格之 樹冠高度模型。由於原始雷射掃描資料極為龐大,
需耗費大量之硬碟儲存空間與電腦運算時間,本文 僅從原始資料擷取涵蓋1 km × 1 km 之測試資料,進 行演算分析試驗,並將其結果與地面樣區調查資料 比較,以檢核其推估值之精確度。
航測及遙測學刊 第十卷 第一期 民國 94 年 3 月 6
圖2. QuickBird 衛星影像與 LIDAR 覆蓋面點(surface point)及地面點(ground point)套疊圖
圖 3. QuickBird 衛星影像與 LIDAR 地面點(ground point)套疊圖
3. 結果與討論
圖 4、圖 5 分別為由以 LIDAR 地面點建立之 LIDAR_TIN 經 內 插 推 估 之 數 值 高 程 模 型 (DEM_GROUND),以及由 4 m × 4 m 網格之最低高 程值所產生之數值高程模型(DEM_MIN),圖 6 為 4 m 解析度數值高程模型(DEM_4M),圖 7 為擷取落於 4 m × 4 m 網格中之所有 LIDAR 觀測值的最大高程值 所產生之DSM。
從圖 4 可以明顯看出因地面點涵蓋不足而造成 許多具有平滑面的三角網,無法表現地形的細微變 化。DEM_MIN 相較於 DEM_4M 則有較多的起伏變 化,此乃因為DEM_MIN 記錄的是 4 m × 4 m 網格中 之最低高程值,在密林中往往並非真正地面點。圖7 的DSM 顯示植群濃密區域影像表面較為平滑,植群 較稀疏處則高低起伏較大而有較為複雜的紋理,試 驗區左上方的道路在圖5 和圖 7 中均清晰可見。
圖8 為 DSM 與 DEM_GROUND 相減所得到之 CHM (CHM_GROUND),圖 9 為 DSM 與 DEM_MIN 相減所得到之CHM (CHM_MIN),圖 10 為 DSM 與 DEM_4M 相減所得到之 CHM (CHM_DEM4M)。
CHM_MIN 為 4 m × 4 m 網格中最大高程減去最小高 程,所得到之樹高值最高為29.680 m,最小為 0 m,
亦即沒有植生覆蓋的地面點。CHM_GROUND 所得 到之樹高值介於 -10.404 m 與 43.921 m 之間,
CHM_DEM4M 所得到之樹高值介於 -8.280 m 與 31.680 m 之間,兩者皆有樹高為負值之不合理現象,
顯 示 在 部 分 區 域 覆 蓋 面 點 的 高 程 值 低 於 DEM_GROUND 與 DEM_4M 的地面高程,此應為 LIDAR 測得之高程過於低估所致。經檢視樹高之空 間分布狀況,發現樹高值為負者大多數發生於建 物、道路、裸露地與疏林區域。這些區域以 LIDAR 量測理應較少受到植生覆蓋的干擾,其量測值偏 低,應可推論LIDAR 量測值存在系統性的誤差。
雷射掃描資料至今仍多由系統研發廠商負責資 料蒐集與處理,然後將成果交付使用者,其資料分 析演算法為何,廠商常基於商業利益不願說明。而 諸如系統之率定(calibration)、航線平差、控制點之數 量與分布等,對於資料之品質很重要,卻無標準之 實施程序,因此使用者往往無法確知資料之精度與 可靠性(Baltsavias, 1999)。本研究取得之 LIDAR 資料 由系統研發廠商之工程師處理原始數據,並分類為 地面點與覆蓋面點,其演算法為何,以及處理程序 是否完整,吾人僅由最終之數據實在難以得知。為 驗證LIDAR 量測數據之精度與 DEM_4M 之品質,
本研究以GPS 量測 27 個控制點,並以控制點之平面 座標經線性內插解算 DEM4M_TIN 與 LIDAR_TIN 相對應點位之高程,以供相互比較,表 3 為其比較 之結果。
表3 顯示 GPS 控制點之高程平均高於 DEM_4M 約0.4121 m,其中誤差為 0.9214 m。LIDAR 地面點 高程相較於GPS 控制點有低估之現象,其平均誤差 1.5000 m,中誤差為 0.9357 m。若將 LIDAR 地面點 高程與DEM_4M 比較,其絕對誤差介於 0.0001 m 與 15.9124 m 之間,平均比 DEM_4M 低 0.4446 m,中 誤差為2.3765 m。由此可知 LIDAR 量測數值確實存 在系統性誤差,若僅與GPS 控制點比較,其值偏低 約1.5 m,若比較 LIDAR 地面點、DEM_4M 及 GPS 控制點之相對數據,則其值偏低約0.857 m。史天元 與彭淼祥在九份二山以同一掃描儀所得數據驗證其 高程,其誤差期望值為 –0.960 m,與本研究所得結 果頗為相近,其誤差來源主要為系統率定未完全所 致(史天元、彭淼祥,2002)。
航測及遙測學刊 第十卷 第一期 民國 94 年 3 月 8
圖 4. 由 LIDAR_TIN 經內插推估之數值高程模型 (DEM_GROUND)
圖 5. 由 4 m × 4 m 網格之最低高程值所產生之數 值高程模型(DEM_MIN)
圖 6. 4 m 解析度數值高程模型(DEM_4M) 圖 7. 由 4 m × 4 m 網格中之最大高程值所產生之 DSM
圖 8. DSM 與 DEM_GROUND 相減所得到之樹冠高度模型(CHM_GROUND)
圖 9. DSM 與 DEM_MIN 相減所得到之樹冠高度模型(CHM_MIN)
圖 10 為 DSM 與 DEM_4M 相減所得到之樹冠高度模型(CHM_4M)
表 3. 地面控制點(GCP)、LIDAR 地面點與 DEM 三者高程之比較
高程差 觀測點數 平均誤差 (m)
平均絕對誤差 (m)
最大絕對誤差 (m)
最小絕對誤差 (m)
標準差 (m) Gh – Dh 27 0.4121 0.7811 1.8735 0.0167 0.9214
Gh – Lt 27 1.5000 1.6891 2.5522 0.1294 0.9357 Lh – Dh 23157 -0.4446 1.7409 15.9124 0.0001 2.3765
註: Gh 表 GCP 之高程,Dh表由 DEM4M_TIN 內插推估之高程,Lt 表由 LIDAR_TIN 內插推估之高程,Lh 表 LIDAR 測得地面點之高程。
航測及遙測學刊 第十卷 第一期 民國 94 年 3 月 10
為驗證由 LIDAR 資料推估之樹冠高度模型的 精度,本研究以 11 個地面樣區實際測量的樹高與 CHM_4M 做比較,樣區調查日期為 2003 年 3 月 25 日,其結果如表 4 所示,GPS 控制點與樣區位置如 圖11 所示。表中顯示除樣區 7 與 8 之外,以 LIDAR 估測之樹冠高度普遍有低估之現象。以離散覆蓋面 點估測樹冠高度平均誤差為-5.67m 至 1.95m,以規則 網格最大高程估測樹冠高度表現較佳,其誤差介於 -5.46m 至 1.31m 之間。Næsset(1997)利用僅紀錄最後 回波值之雷射掃描系統依胸高斷面積(basal area)加
權計算平均樹高。樣區平均樹高自8 m 至 24 m,利 用所有雷射掃描系統偵測點位計算得之樹高資料較 地真資料約低估4.1 m 至 5.5 m,若以網格式方式處 理雷射掃描系統所得資料並取網格內回波值之最大 高程值為網格值時,所得平均樹高較地真資料之偏 差值為-0.4 m 至 1.6 m。本研究結果與 Næsset 之研究 結果類似,兩者之差異可能因離散覆蓋面點所對應 之地面高程為由 TIN 內插所得,規則網格點則直接 對應到該網格之DEM 高程,相較之下前者之地面高 程誤差可能偏高。
表 4. LIDAR 資料推估之樹高與地面樣區實測樹高之比較 樣區編號 樣木株數 地 面 實 測 樹
高 平 均 值 ( m )
離 散 覆 蓋 面 點 估 測 樹 高 平 均 值 ( m )
規 則 網 格 最 大 高 程 估 測 樹 高 平 均 值 ( m )
1 36 8.40 2.90 3.94
2 27 8.60 2.70 4.19
3 28 7.28 3.96 4.22
4 43 8.16 5.34 5.50
5 31 6.84 2.59 3.45
6 31 7.27 5.13 3.93
7 44 6.72 7.06 6.84
8 33 6.15 8.10 7.46
9 18 6.51 4.74 5.05
10 29 7.01 2.69 3.72
11 26 8.64 2.97 3.18
圖 11. 地面控制點與地面樣區位置圖
以LIDAR 資料估測樹冠高度與地面實測樹高不 符之原因,大略可歸納如下:
1. 地面樣區測量時間較 LIDAR 資料獲取之時 間晚了將近一年,林木之自然增生導致測量 數據之不同。
2. 地 面 測 量 林 木 以 樹 底 至 樹 梢 之 距 離 為 樹 高,LIDAR 測得之點位則可能為低於樹梢之 樹幹、枝條、葉部等,因此有普遍低估樹高 之趨勢。
3. 樹高之推估係以 DEM 之高程為參考值,且 DEM 係由正高經內插推算橢球高,DEM 之 精度為何仍待蒐集更多資料,以便進一步的 檢驗。
4. LIDAR 系統之量測精度因施測之方式與地 表覆蓋、地形等因子之影響而有所不同,亦 可能為產生誤差之來源。
5. 雷射掃描系統本身之率定若未完全,亦可能 影響其量測精度。以本研究所取得之資料為 例,其系統誤差即可能影響樹高估測之精 度。
4. 結論
本研究之目的為利用空載雷射掃描資料獲取樹 冠高度資料,綜合研究成果可獲得以下結論:
1. 本研究所取得之空載雷射掃描資料點雲密 度為0.6 pt/m2,用於推估數值高程模型難以 獲得精確結果,未來應嘗試以其他輔助資料 提高數值高程模型估測之精度。
2. LIDAR 技術有助於直接獲取樹冠高度資 料,以 LIDAR 資料估測樹冠高度普遍有低 估之情形,若有較精確之數值高程模型,樹 高之估測精度應可提升。
3. 本研究以 1 km x 1 km 試區實驗樹冠高度模
型推估方法,雖已獲致初步成果,惟LIDAR 系 統 之 量 測 精 度 因 施 測 之 方 式 與 地 表 覆 蓋、地形等因子之影響而有所不同,因此不 同 區 域 獲 得 的 樹 冠 高 度 模 型 精 度 也 將 不 同,為提昇樹冠高度模型之估測精度,宜再 蒐集更多樣區資料以供比較。
謝誌
本研究承蒙行政院國家科學委員會計畫補助 (NSC 92-2313-B-004-001),台北市政府建設局、行政院 農業委員會林務局農林航空測量所、台灣大學陳永 寬教授、交通大學史天元教授等提供資料,始得以 完成,謹此致謝。
參考文獻
王淼、賴志恆、曾義星,2003。LIDAR 資料之八分 樹分割與合併,第二十二屆測量學術及應用研 討會論文集,中正理工學院,台灣桃園,77-85。
史天元、彭淼祥,2002。九二一地震災區空載雷射 掃描作業成果初步報告,第二十一屆測量學術 及應用研討會論文集,交通大學,台灣新竹,
449-456。
史天元、彭淼祥,2003a。空載雷射掃描數據精度評 估程序之研究,第二十二屆測量學術及應用研 討 會 論 文 集 , 中 正 理 工 學 院 , 台 灣 桃 園 , 247-256。
史天元、彭淼祥,2003b。以空載雷射掃描與航空攝 影測量製作數值高程模型之比較,農委會92 年 度試驗研究計畫研究報告,共54 頁。
邵怡誠、陳良健,2003。利用光達資料於 DTM 生產 及房屋偵測,第二十二屆測量學術及應用研討
航測及遙測學刊 第十卷 第一期 民國 94 年 3 月 12
會論文集,中正理工學院,台灣桃園,87-94。
陳永寬、詹進發、成晨光、葉堃生、郭家隆,2003。
台北市保安林檢訂管理,「台北市九十一年度加 速保安林檢訂管」研究成果報告,台北市政府 建設局,共330 頁。
陳良健、賴彥中、饒見有,2003。結合光達資料與 數位空照影像建立三維建物區塊,第二十二屆 測量學術及應用研討會論文集,中正理工學 院,台灣桃園,273-280。
陽明山國家公園,2004。陽明山國家公園網站─草山 風采:
http://www.ymsnp.gov.tw/HTML/CHI/INTRO/IN TRO-INDEX.HTM (2004/6/24)。
Babichenko, S.M., L. Poryvkina, A.E. Dudelzak, and P.
Wassmann, 2001. Spectroscopic lidar sensing in three-dimensional profiling of marine organics, International Journal of Remote Sensing, 22:385-402.
Baltsavias, E.P., 1999. A comparison between photogrammetry and laser scanning, ISPRS Journal of Photogrammetry & Remote Sensing, 54:83–94.
Blair, J.B, D.L. Rabine, and M.A. Hofton, 1999. The Laser Vegetation Imaging Sensor: a medium-altitude, digitization-only, airborne laser altimeter for mapping vegetation and topography, ISPRS Journal of Photogrammetry & Remote Sensing, 54:115–122.
Cracknell, A.P., 1999. Remote sensing techniques in estuaries and coastal zones—an update, International Journal of Remote Sensing, 19:485-496.
Davenport, I.J., R.B. Bradbury, G.Q. Anderson, G.R.
Hayman, J.R. Krebs, D.C. Mason, J.D. Wilson, and N.J. Veck, 2000. Improving bird population models using airborne remote sensing, International Journal of Remote Sensing, 21:2705-2717.
Kaufman, Y. J., D. Tanre, J.F. Leon, and J. Pelon, 2003.
Retrievals of Profiles of Fine and Coarse Aerosols Using Lidar and Radiometric Space Measurements, IEEE Transactions on Geoscience and Remote Sensing, 41(8):1743-1754.
Lefsky, M.A., W.B. Cohen, T. A. Spies, 2001. An Evaluation of Alternate Remote Sensing Products for Forest Inventory, Monitoring, and Mapping of Douglas-Fir Forests in Western Oregon, Can . J.
For. Res., 31:78-87.
Leica Geosystems, 2002. ALS40 Airborne Laser Scanner Product Description, Atlanta, Georgia:
Leica Geosystems, 1-10.
Næsset, E., 1997. Determination of mean tree height of forest stands using airborne laser data, ISPRS Journal of Photogrammetry & Remote Sensing, 52:49-56.
Sithole, G., and G. Vosselman, 2003. Comparison of Filtering Algorithms, Proceedings of the ISPRS working group III/3 workshop, 3-D reconstruction from airborne laser scanner and InSAR data, Dresden, Germany, 8-10 October 2003.
Smith, G, A. Persson, J. Hohmgren, B. Hallberg, J.E.S.
Fransson, and L.M.H. Ulander, 2002. Forest Stem Volume Estimation Using High-Resolution Lidar and SAR Data, Geoscience and Remote Sensing
Symposium, IGARSS’02, 2002 IEEE International, 4:24-28.
St-Onge, B. A. and N. Achaichia. 2001. Measuring forest canopy height using a combination of LIDAR and aerial photography data, Workshop on Land Surface Mapping and Characterization Using Laser Altimetry, Annapolis, Maryland, USA, October 22-24, 2001.
Utkin, A.B., A.V. Lavrov, L. Costa, F. Simoes, and R.
Vilar, 2002. Detection of small forest fires by lidar, Applied Physics B, 74:77-83.
Journal of Photogrammetry and Remote Sensing, Volume 10, No.1, March 2005 14
Estimation of Forest Canopy Height Using Airborne Lidar Data
Jihn-Fa Jan
ABSTRACT
Forest ecosystem management depends on detailed information about forest stand structure.
Traditional ground investigation requires vast amount of manpower, resources, costs, and time, hence it is not easy to promptly obtain accurate information by using ground investigation. Airborne laser scanner (LIDAR) is capable of measuring objects at very high density and penetrating gaps among tree crowns, therefore it can rapidly obtain 3D data about forest stands, and can be used for acquiring related data about forest stand structures. This study utilized an airborne laser scanner data set, acquired using Leica ALS40 scanner, of the Yangminshan National Park area to derive digital surface model for the forest canopy.
Furthermore, the forest canopy height model was estimated by computing the difference between the digital surface model and a digital elevation model. The canopy height model was compared to the tree heights measured in eleven ground sample plots in order to assess its accuracy. The results indicate that the forest canopy height is generally underestimated by using the LIDAR data. More accurate forest canopy height model can be achieved, if the accuracy of the digital surface model and digital elevation model can be improved.
Key Words: airborne lidar, canopy height, digital surface model, digital elevation model
Received Date: Sep. 10, 2004 Revised Date: Oct. 19, 2004 Accepted Date: Oct. 22, 2004
1 Assistant Professor, Department of Land Economics, National Chengchi University.