Division
Instructor: Kuan Jen Lin
E-Mail: [email protected] Dept. of EE, FJU, Taiwan Room: SF 727B
Most slides are revision of PowerPoint files
gotten from textbook website.
Division
Chapter 16 Division by Convergence Chapter 15 Variations in Dividers
Chapter 14 High-Radix Dividers
Chapter 13 Basic Division Schemes
Topics in This Part
Review Division schemes and various speedup methods
• Hardest basic operation (fortunately, also the rarest)
• Division speedup methods: high-radix, array, . . .
• Combined multiplication/ division hardware
• Digit-recurrence vs convergence division schemes
13 Basic Division Schemes
Chapter Goals
Study shift/subtract or bit-at-a-time dividers and set the stage for faster methods and variations to be covered in Chapters 14-16
Chapter Highlights
Shift/subtract divide vs shift/add multiply Hardware, firmware, software algorithms Dividing 2’s-complement numbers
The special case of a constant divisor
Shift/Subtract Division Algorithms
Notation for our discussion of division algorithms:
z Dividend z
2k–1z
2k–2. . . z
3z
2z
1z
0d Divisor d
k–1d
k–2. . . d
1d
0q Quotient q
k–1q
k–2. . . q
1q
0s Remainder, z – (d × q) s
k–1s
k–2. . . s
1s
0Initially, we assume unsigned operands
Division of an 8-bit number by a 4-bit number in dot notation.
Dividend Subtracted bit-matrix z
s Remainder
Quotient Divisor q
d
q d 2
3 3–
q d 2
2–
2q d 2
1–
1q d 2
0–
0Division versus Multiplication (1/2)
Division is more complex than multiplication:
Need for quotient digit selection or estimation
Overflow possibility:
the high-order k bits of z must be strictly less than d; the quotient of a 2k bit number divided by a k bit number may have a width of more than k bits.
Dividend Subtracted bit-matrix z
s Remainder
Quotient Divisor q
d
q d 2 3 – 3
q d 2 2 – 2
q d 2 1 – 1
q d 2 0 – 0
Division versus Multiplication (2/2)
Pentium III latencies
Instruction Latency Cycles/Issue
Load / Store 3 1
Integer Multiply 4 1
Integer Divide 36 36
Double/Single FP Multiply 5 2
Double/Single FP Add 3 1
Double/Single FP Divide 38 38
Division Recurrence
Division with left shifts
s
(j)= 2s
(j–1)– q
k–j(2
kd) with s
(0)= z and
|–shift–| s
(k)= 2
ks
|––– subtract –––|
(There is no corresponding right-shift algorithm)
Dividend Subtracted bit-matrix z
s Remainder
Quotient Divisor q
d
q d 2 3 3 –
q d 2 2 2 –
q d 2 1 1 –
q d 2 0 0 –
Integer division is characterized by z = d × q + s 2
–2kz = (2
–kd) × (2
–kq) + 2
–2ks
z
frac= d
frac× q
frac+ 2
–ks
fracDivide fractions like integers; adjust the remainder
No-overflow condition for fractions is:
z
frac< d
frack bits k bits
2z 2
kd
0
Division Recurrence Steps
Initialization
Iterations
One digit arithmetic left-shift of s (j) to produce rs (j)
Determination of the quotient digit q j+1 by the quotient-digit selection function;
The index of q could be different
Generation of the divisor multiple d × q j+1
Subtraction of dq j+1 from rs (j) .
On-the-fly conversion of the quotient
Or done in the termination step
Termination:
make sign(s)=sign(d)), conversion
Examples of Basic Division
Integer division Fractional division
====================== =====================
z 0 1 1 1 0 1 0 1 z
frac. 0 1 1 1 0 1 0 1
2
4d 1 0 1 0 d
frac. 1 0 1 0
====================== =====================
s
(0)0 1 1 1 0 1 0 1 s
(0). 0 1 1 1 0 1 0 1 2s
(0)0 1 1 1 0 1 0 1 2s
(0)0 . 1 1 1 0 1 0 1 –q
32
4d 1 0 1 0 {q
3= 1} –q
–1d . 1 0 1 0 {q
–1=1}
––––––––––––––––––––––– ––––––––––––––––––––––
s
(1)0 1 0 0 1 0 1 s
(1). 0 1 0 0 1 0 1 2s
(1)0 1 0 0 1 0 1 2s
(1)0 . 1 0 0 1 0 1
–q
22
4d 0 0 0 0 {q
2= 0} –q
–2d . 0 0 0 0 {q
–2=0}
––––––––––––––––––––––– ––––––––––––––––––––––
s
(2)1 0 0 1 0 1 s
(2). 1 0 0 1 0 1 2s
(2)1 0 0 1 0 1 2s
(2)1 . 0 0 1 0 1
–q
12
4d 1 0 1 0 {q
1= 1} –q
–3d . 1 0 1 0 {q
–3=1}
––––––––––––––––––––––– ––––––––––––––––––––––
s
(3)1 0 0 0 1 s
(3). 1 0 0 0 1 2s
(3)1 0 0 0 1 2s
(3)1 . 0 0 0 1
–q
02
4d 1 0 1 0 {q
0= 1} –q
–4d . 1 0 1 0 {q
–4=1}
––––––––––––––––––––––– ––––––––––––––––––––––
s
(4)0 1 1 1 s
(4). 0 1 1 1
s 0 1 1 1 s
frac0 . 0 0 0 0 0 1 1 1
q 1 0 1 1 q
frac. 1 0 1 1
====================== =====================
Notice the index of q
What is the
residual of
0.0112 / 0.1?
Main Factors Affecting the Overall Execution Time and Cost
Radix r
Quotient-digit set
Redundant signed digit?
Representation of the residual
CSA?
Quotient-digit selection
Programmed Division
Register usage for programmed division.
Rs Rq
Rd
0 0 . . . 0 0 0 0 2 d k
Carry Flag
Shifted Partial
Remainder Shifted Partial Quotient
Partial Remainder
(2k – j Bits) Partial Quotient (j Bits)
Next quotient digit inserted here
Divisor d
Assembly Language Program for Division
Programmed division using left shifts.
{Using left shifts, divide unsigned 2k-bit dividend,
z_high|z_low, storing the k-bit quotient and remainder.
Registers: R0 holds 0 Rc for counter
Rd for divisor Rs for z_high & remainder Rq for z_low & quotient}
{Load operands into registers Rd, Rs, and Rq}
div: load Rd with divisor load Rs with z_high load Rq with z_low {Check for exceptions}
branch d_by_0 if Rd = R0 branch d_ovfl if Rs > Rd {Initialize counter}
load k into Rc {Begin division loop}
d_loop: shift Rq left 1 {zero to LSB, MSB to carry}
rotate Rs left 1 {carry to LSB, MSB to carry}
skip if carry = 1
branch no_sub if Rs < Rd sub Rd from Rs
incr Rq {set quotient digit to 1}
no_sub: decr Rc {decrement counter by 1}
branch d_loop if Rc 0 {Store the quotient and remainder}
store Rq into quotient store Rs into remainder d_by_0: ...
d_ovfl: ...
d_done: ...
Rs Rq
Rd
0 0 . . . 0 0 0 0 2 dk
Carry Flag
Shifted Partial
Remainder Shifted Partial Quotient
Partial Remainder
(2k ?j Bits) Partial Quotient (j Bits)
Next quotient digit inserted here
Divisor d
Register usage
for programmed
division.
Time Complexity of Programmed Division
Assume k-bit words
k iterations of the main loop
6 or 8 instructions per iteration, depending on the quotient bit
Thus, 6k + 3 to 8k + 3 machine instructions, ignoring operand loads and result store
k = 32 implies 220 + instructions on average This is too slow for many modern applications!
Microprogrammed division would be somewhat better
Restoring Hardware Dividers
Shift/subtract sequential restoring divider.
Quotient q
Mux
Adder c
out0 1
Partial remainder s (initial value z)
Divisor d
Shift Shift
Load
1 c
in(j)
Quotient digit selector q
k–jMSB of 2s
(j–1)k
k
k
Trial difference
Indirect Signed Division
In division with signed operands, q and s are defined by z = d × q + s sign(s) = sign(z) |s | < |d | Examples of division with signed operands
z = 5 d = 3 ⇒ q = 1 s = 2 z = 5 d = –3 ⇒ q = –1 s = 2 z = –5 d = 3 ⇒ q = –1 s = –2 z = –5 d = –3 ⇒ q = 1 s = –2
Magnitudes of q and s are unaffected by input signs Signs of q and s are derivable from signs of z and d Will discuss direct signed division later
(not q = –2, s = –1)
Example of Restoring Unsigned Division
=======================
z 0 1 1 1 0 1 0 1 2
4d 0 1 0 1 0
–2
4d 1 0 1 1 0
=======================
s
(0)0 0 1 1 1 0 1 0 1 2s
(0)0 1 1 1 0 1 0 1 +(–2
4d) 1 0 1 1 0
––––––––––––––––––––––––
s
(1)0 0 1 0 0 1 0 1 Positive, so set q
3= 1 2s
(1)0 1 0 0 1 0 1
+(–2
4d) 1 0 1 1 0
––––––––––––––––––––––––
s
(2)1 1 1 1 1 0 1 Negative, so set q
2= 0 s
(2)=2s
(1)0 1 0 0 1 0 1 and restore
2s
(2)1 0 0 1 0 1 +(–2
4d) 1 0 1 1 0
––––––––––––––––––––––––
s
(3)0 1 0 0 0 1 Positive, so set q
1= 1 2s
(3)1 0 0 0 1
+(–2
4d) 1 0 1 1 0
––––––––––––––––––––––––
s
(4)0 0 1 1 1 Positive, so set q
0= 1
s 0 1 1 1
q 1 0 1 1
=======================
No overflow, because
(0111)
two< (1010)
twoNonrestoring and Signed Division
The cycle time in restoring division must be long enough to allow:
Shifting the registers
Allowing signals to propagate through the adder Determining and storing the next quotient digit Storing the trial difference, if required
Quotient q
Mux
Adder c out
0 1
Partial remainder s (initial value z)
Divisor d
Shift Shift
Load
1 c in
(j)
Quotient digit selector q k–j
MSB of 2s (j–1) k
k k Trial difference
Nonrestoring division to the rescue!
Assume q
k–j= 1 and subtract Store the result as the new PR
(the partial remainder can
become incorrect, hence
the name “nonrestoring”)
Justification for Nonrestoring Division
Why it is acceptable to store an incorrect value in the partial-remainder register?
Shifted partial remainder at start of the cycle is u
Suppose subtraction yields the negative result u – 2
kd
Option 1: Restore the partial remainder to correct value u, shift left, and subtract to get 2u – 2
kd
Option 2: Keep the incorrect partial remainder u – 2
kd,
shift left, and add to get 2(u – 2
kd) + 2
kd = 2u – 2
kd
Example of Nonrestoring Unsigned Division
=======================
z 0 1 1 1 0 1 0 1 2
4d 0 1 0 1 0
–2
4d 1 0 1 1 0
=======================
s
(0)0 0 1 1 1 0 1 0 1
2s
(0)0 1 1 1 0 1 0 1 Positive, +(–2
4d) 1 0 1 1 0 so subtract ––––––––––––––––––––––––
s
(1)0 0 1 0 0 1 0 1
2s
(1)0 1 0 0 1 0 1 Positive, so set q
3= 1 +(–2
4d) 1 0 1 1 0 and subtract
––––––––––––––––––––––––
s
(2)1 1 1 1 1 0 1
2s
(2)1 1 1 1 0 1 Negative, so set q
2= 0 +2
4d 0 1 0 1 0 and add
––––––––––––––––––––––––
s
(3)0 1 0 0 0 1
2s
(3)1 0 0 0 1 Positive, so set q
1= 1 +(–2
4d) 1 0 1 1 0 and subtract
––––––––––––––––––––––––
s
(4)0 0 1 1 1 Positive, so set q
0= 1
s 0 1 1 1
q 1 0 1 1
=======================
No overflow: (0111)
two< (1010)
twoApplying “if sign(s) = sign(d) then qk–j = 1 else qk–j = -1 “, we get 11-11, that
equals 1011
Graphical Depiction of Nonrestoring Division
300
200
100
0
–100 117
234
74
148
–12 296
136 272
112
s(0)
s(1)
s(2)
s(3)
s =16s(4)
2 –160
×
×2 ×2
×2
–160
–160
–160
Partial remainder
(a) Restoring
148
300
200
100
0
–100 117
234
74
148
–12
–24 136
272
112
s(0)
s(1)
s(2)
s(3)
s =16s(4)
2 –160
×
×2
×2
×2
–160
+160
–160
Partial remainder
(b) Nonrestoring
Example
(0 1 1 1 0 1 0 1)
two/ (1 0 1 0)
two(117)
ten/ (10)
tenNonrestoring Division with Signed Operands
Restoring division
q
k–j= 0 means no subtraction (or subtraction of 0) q
k–j= 1 means subtraction of d
Nonrestoring division
We always subtract or add
It is as if quotient digits are selected from the set {1, −1}:
1 corresponds to subtraction −1 corresponds to addition Our goal is to end up with a remainder that matches the sign
of the dividend
This idea of trying to match the sign of s with the sign z, leads to a direct signed division algorithm
if sign(s) = sign(d) then q
k–j= 1 else q
k–j= −1
Example: q = . . . 0 0 0 1 . . .
. . . 1
−1
−1
−1 . . .
Quotient Conversion and Final Correction
Partial remainder variation and selected quotient
digits during nonrestoring division with d > 0
d
0
−d
+d
−d
−d
−d +d
+d
×2 ×2
×2
×2
×2
−
1 1
−1
−1 1 1 z
0 1 0 0 1 1 1 1 0 0 1 1 1 Quotient with digits
−1 and 1
Final correction step if sign(s) ≠ sign(z):
Add d to, or subtract d from, s; subtract 1 from, or add 1 to, q
Check: −32 + 16 – 8 – 4 + 2 + 1 = −25 = −64 + 32 + 4 + 2 + 1
Replace
−1s with 0s
Shift left, complement MSB, and set LSB to 1 to get the 2’s-complement quotient
1 1 0 1 0 0 0
Example of Nonrestoring Signed Division
========================
z 0 0 1 0 0 0 0 1 2
4d 1 1 0 0 1
–2
4d 0 0 1 1 1
========================
s
(0)0 0 0 1 0 0 0 0 1
2s
(0)0 0 1 0 0 0 0 1 sign(s
(0)) ≠ sign(d), +2
4d 1 1 0 0 1 so set q
3=
−1 and add ––––––––––––––––––––––––
s
(1)1 1 1 0 1 0 0 1
2s
(1)1 1 0 1 0 0 1 sign(s
(1)) = sign(d),
+(–2
4d) 0 0 1 1 1 so set q
2= 1 and subtract ––––––––––––––––––––––––
s
(2)0 0 0 0 1 0 1
2s
(2)0 0 0 1 0 1 sign(s
(2)) ≠ sign(d), +2
4d 1 1 0 0 1 so set q
1=
−1 and add ––––––––––––––––––––––––
s
(3)1 1 0 1 1 1
2s
(3)1 0 1 1 1 sign(s
(3)) = sign(d),
+(–2
4d) 0 0 1 1 1 so set q
0= 1 and subtract ––––––––––––––––––––––––
s
(4)1 1 1 1 0 sign(s
(4)) ≠ sign(z),
+(–2
4d) 0 0 1 1 1 so perform corrective subtraction ––––––––––––––––––––––––
s
(4)0 0 1 0 1
s 0 1 0 1
q
−1 1
−1 1
========================
p = 0 1 0 1 Shift, compl MSB 1 1 0 1 1 Add 1 to correct
1 1 0 0 Check: 33/(−7) = −4
On-The-Fly Conversion
Source: Ercegovac and Lang,
“Digital Arithmetic”, pp. 257
Nonrestoring Hardware Divider
Shift-subtract sequential nonrestoring divider.
Quotient
k
Partial Remainder
Divisor
add/sub
k-bit adder k
c
outc
inComplement
q
k2s (j?) MSB of
Divisor Sign
Complement of
Partial Remainder Sign
Division by Constants
Software and hardware aspects:
As was the case for multiplications by constants, optimizing compilers may replace some divisions by shifts/adds/subs; likewise, in custom VLSI circuits, hardware dividers may be replaced by simpler adders Method 1: Find the reciprocal of the constant and multiply (particularly efficient if several numbers must be divided by the same divisor)
Method 2: Use the property that for each odd integer d, there exists an odd integer m such that d × m = 2 n – 1; hence, d = (2 n – 1)/m and
Number of shift-adds required is proportional to log k Multiplication by constant Shift-adds
L ) 2
1 )(
2 1 )(
2 1 2 ( )
2 1 ( 2 1 2
4
2n n
n n
n n
n
zm zm
zm d
z
− − −−
= + + +
= −
= −
Example: Division by a Constant
L ) 2
1 )(
2 1 )(
2 1 ( 2 )
2 1 ( 2 1 2
4
2 n n
n n
n n
n
zm zm
zm d
z − − −
− = + + +
= −
= −
Example: Dividing the number z by 5, assuming 24 bits of precision.
We have d = 5, m = 3, n = 4; 5 × 3 = 2
4– 1
Instruction sequence for division by 5
q ← z + z shift-left 1 {3z computed}
q ← q + q shift-right 4 {3z(1 + 2
–4) computed}
q ← q + q shift-right 8 {3z(1 + 2
–4)(1 + 2
–8) computed}
q ← q + q shift-right 16 {3z(1 + 2
–4)(1 + 2
–8)(1 + 2
–16) computed}
q ← q shift-right 4 {3z(1 + 2
–4)(1 + 2
–8)(1 + 2
–16)/16 computed}
L ) 2
1 )(
2 1 )(
2 1 16 ( 3 )
2 1 ( 2
3 1
2 3 5
16 8
4 4
4 4
−
−
− = + − + +
= −
= z − z z
z
5 shifts
4 adds
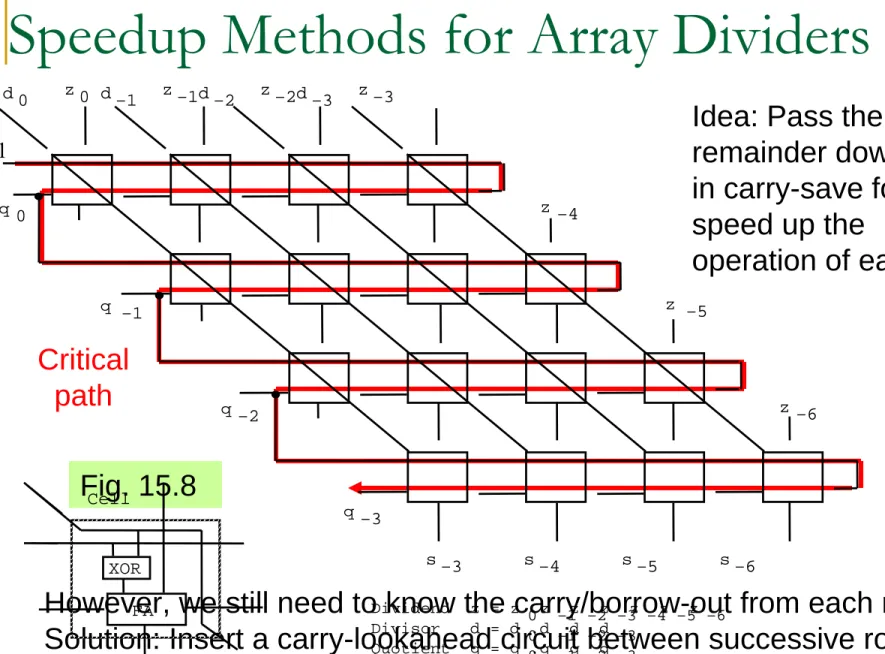
Preview of Fast Dividers
Like multiplication, there are but two ways to speed it up:
a. Reducing the number of operands (divide in a higher radix) b. Adding them faster (keep partial remainder in carry-save form)
a x
p 2 x a 0
0
x a 2 1 1
x a 2 2 2 2 3 x a 3
×
(a) k × k integer multiplication
z
s Di visor q
d
q d 2 3 3 –
q d 2 2 2 –
q d 2 1 1 –
q d 2 0 0 –
(b) 2k / k integer di vision
Both (a)
Multiplication and (b) division can be considered as
multioperand
addition problems.
There is one complication that makes division inherently more difficult:
The terms to be subtracted from (added to) the dividend are not known a priori but become known as quotient digits are computed;
quotient digits in turn depend on partial remainders
14 High-Radix Dividers
Chapter Goals
Study techniques that allow us to obtain more than one quotient bit in each cycle (two bits in radix 4, three in radix 8, . . .)
Chapter Highlights
Radix > 2 ⇒ quotient digit selection harder Remedy: redundant quotient representation Carry-save addition reduces cycle time
Implementation methods and tradeoffs
Basics of High-Radix Division
Division with left shifts
s
(j)= r s
(j–1)– q
k–j(r
kd) with s
(0)= z and
|–shift–| s
(k)= r
ks
|––– subtract –––|
Dividend z
s Remainder
Quotient Divisor q
d
(q q ) d 4
1–
32 tw o
4
0d (q q )
–
10 tw o
Radix-4 division in dot notation
k digits k digits
r z q
k–jr
kd
0
Examples of High-Radix Division
Radix-4 integer division Radix-10 fractional division
====================== =================
z 0 1 2 3 1 1 2 3 z
frac. 7 0 0 3
4
4d 1 2 0 3 d
frac. 9 9
====================== =================
s
(0)0 1 2 3 1 1 2 3 s
(0). 7 0 0 3 4s
(0)0 1 2 3 1 1 2 3 10s
(0)7 . 0 0 3
–q
34
4d 0 1 2 0 3 {q
3= 1} –q
–1d 6 . 9 3 {q
–1= 7}
––––––––––––––––––––––– ––––––––––––––––––
s
(1)0 0 2 2 1 2 3 s
(1). 0 7 3
4s
(1)0 0 2 2 1 2 3 10s
(1)0 . 7 3
–q
24
4d 0 0 0 0 0 {q
2= 0} –q
–2d 0 . 0 0 {q
–2= 0}
––––––––––––––––––––––– ––––––––––––––––––
s
(2)0 2 2 1 2 3 s
(2). 7 3
4s
(2)0 2 2 1 2 3 s
frac. 0 0 7 3
–q
14
4d 0 1 2 0 3 {q
1= 1} q
frac. 7 0
––––––––––––––––––––––– =================
s
(3)1 0 0 3 3 4s
(3)1 0 0 3 3
–q
04
4d 0 3 0 1 2 {q
0= 2}
–––––––––––––––––––––––
s
(4)1 0 2 1
s 1 0 2 1
q 1 0 1 2
======================
Difficulty of Quotient Digit Selection
What is the first quotient digit in the following radix-10 division?
_____________
2 0 4 3 | 1 2 2 5 7 9 6 8
The problem with the pencil-and-paper division algorithm is that there is no room for error in choosing the next quotient digit
In the worst case, all k digits of the divisor and k + 1 digits in the partial remainder are needed to make a correct choice
12 / 2 = 6
122 / 20 = 6
1225 / 204 = 6
12257 / 2043 = 5
Suppose we used the redundant signed digit set [–9, 9] in radix 10
Then, we could choose 6 as the next quotient digit, knowing that we can
recover from an incorrect choice by using negative digits: 5 9 = 6 - 1
Radix-2 SRT Division (1/3)
The new partial remainder, s
(j), as a function of the shifted old partial remainder, 2s
(j–1), in radix-2 nonrestoring division.
Algorithm in Ch 13.4
–2d 2d
d
–d
q =–1 q =1
2s
(j–1)s
(j)–j –j
d –d
s
(j)= 2s
(j–1)– q
–jd
with s
(0)= z
s
(k)= 2
ks
q
–j∈ {
−1, 1}
Robertson’s Diagram
Axes: the shifted residual 2s (j–1) and the next residual s (j)
It shows the possibilities to choose q and keep the next residual bounded.
P-D Diagram
Shifted residual (Partial remainder) vs. divisor
Diagrams for Quotient Selection
–2d 2d d
–d q =–1 q =0
q =1
2s
(j–1)s
(j)–j
–j –j
–d d
Radix-2 SRT Division (2/3)
q
–j= 0 requires shifting only, which was faster than shift-and-subtract
But how can you tell if –d ≦ 2s (j-1) < d?
s
(j)= 2s
(j–1)– q
–jd with s
(0)= z s
(k)= 2
ks
q
–j∈ {
−1, 0, 1}
•Allowing 0 as a quotient digit in nonrestoring Division
q -j =0 for –d ≦ 2s (j-1) < d
–2d 2d d
–d q =–1
q =0
q =1
2s
(j–1)s
(j)–j
–j
–j
d
–d
–1/2 1/2
–1 1
–1/2 1/2
Radix-2 SRT Division (3/3)
The relationship between new and old partial remainders in radix-2 SRT division.
Comparison with constants −½ and ½ is quite simple 2s ≥ +½ means 2s = (0.1xxxxxxxx)
2’s-compl2s < −½ means 2s = (1.0xxxxxxxx)
2’s-complIf 2s
(j–1)< ½ then q
–j= - 1 else if 2s
(j–1)≧ ½
then q
–j=1 else q
–j=0 endif
endif
Radix-2 SRT Division with Variable Shifts
S
(0)is adjusted to be in [-1/2, 1/2/).
We use the comparison constants −½ and ½ for quotient digit selection For 2s ≥ +½ or 2s = (0.1xxxxxxxx)
2’s-complchoose q
–j= 1
For 2s < −½ or 2s = (1.0xxxxxxxx)
2’s-complchoose q
–j=
−1 Choose q
–j= 0 in other cases, that is, for:
0 ≤ 2s < +½ or 2s = (0.0xxxxxxxx)
2’s-compl−½ ≤ 2s < 0 or 2s = (1.1xxxxxxxx)
2’s-complObservation: What happens when the magnitude of 2s is fairly small?
2s = (0.00001xxxx)
2’s-compl2s = (1.1110xxxxx)
2’s-complChoosing q
–j= 0 would lead to the same condition in the next step;
generate 5 quotient digits 0 0 0 0 1 Generate 4 quotient digits 0 0 0
−1 Use leading 0s or leading 1s detection circuit to determine how many quotient digits can be spewed out at once
Statistically, the average skipping distance will be 2.67 bits
Example Unsigned Radix- 2 SRT Division
========================
z . 0 1 0 0 0 1 0 1 d 0 . 1 0 1 0
–d 1 . 0 1 1 0
========================
s
(0)0 . 0 1 0 0 0 1 0 1
2s
(0)0 . 1 0 0 0 1 0 1 ≥ ½, so set q
−1= 1 +(−d) 1 . 0 1 1 0 and subtract
––––––––––––––––––––––––
s
(1)1 . 1 1 1 0 1 0 1
2s
(1)1 . 1 1 0 1 0 1 In [−½, ½), so set q
−2= 0 ––––––––––––––––––––––––
s
(2)= 2s
(1)1 . 1 1 0 1 0 1
2s
(2)1 . 1 0 1 0 1 In [−½, ½), so set q
−3= 0 ––––––––––––––––––––––––
s
(3)= 2s
(2)0 . 1 0 1 0 1
2s
(3)1 . 0 1 0 1 < −½, so set q
−4=
−1
+d 0 . 1 0 1 0 and add
––––––––––––––––––––––––
s
(4)1 . 1 1 1 1 Negative,
+d 0 . 1 0 1 0 so add to correct ––––––––––––––––––––––––
s
(4)0 . 1 0 0 1
s 0 . 0 0 0 0 0 1 0 1
q 0 . 1 0 0
−1 Uncorrected BSD quotient q 0 . 0 1 1 0 Convert and subtract ulp
========================
In [−½, ½), so okay
0.1000
-0.0001
0.0111
-0.0001
0.0110
Using Carry-Save Adders
Constant thresholds used for quotient digit selection in radix-2 division with q
k–jin {–1, 0, 1} .
–2d 2d
d
–d q =–1
q =0 q =1
2s
(j–1)s
(j)–j
–j
–j
–d d
–1/2 0
Choose –1 Choose 0 Choose 1
–1/0 0/+1
Overlap Overlap
You can choose 0 or 1
in the overlay region
Quotient Digit Selection Based on Truncated PR
Sum part of 2s
(j–1): u = (u
1u
0. u
–1u
–2. . .)
2’s-complCarry part of 2s
(j–1): v = (v
1v
0. v
–1v
–2. . .)
2’s-complApproximation to the partial remainder:
t = u
[–2,1]+ v
[–2,1]{Add the 4 MSBs of u and v}
t := u
[–2,1]+ v
[–2,1]if t < –½
then q
–j= –1 else if t ≥ 0
then q
–j= 1 else q
–j= 0 endif
endif
–2d 2d
d
–d q =–1
q =0 q =1
2s(j–1) s(j)
–j
–j
–j
–d d
–1/2 0
Choose –1 Choose 0 Choose 1
–1/0 0/+1
Overlap Overlap
Error in t
The 4-bit number t=(t 1 t 0 .t -1 t -2 ) 2/s0compl can be compared to the constants -1/2 and 0 based on only the three bit
values t 1 , t 0 and t -1 .
Regardless of sign, truncating the t -2 results in the
maximum truncated value being ½ (when the trye carry- in to t -2 is 1 and t -2 is 1.).
Still in overlay region:
If t < -1/2, the true value of 2s
(j–1)is guaranteed to be less than 0.
If t < 0, we are guaranteed to have 2s
(j–1)< ½ ≦ d.
Divider with Partial Remainder in Carry-Save Form
Carry v
Mux
Adder
0 1
Divisor d
k k
Carry-save adder Select
q
–j4 bits Shift left
2s
+ulp for 2’s compl
Sum u
Non0 (enable) Sign
(select) 0, d, or d’
Carry Sum
Why We Cannot Use Carry-Save PR with SRT Division
Overlap regions in radix-2 SRT division.
–2d 2d
d
–d q =–1
q =0
q =1
2s
(j–1)s
(j)–j
–j
–j
d
–d
1 – d
–1 1
–1/2 1/2
1 – d
The overlay can become arbitrarily small as d
approaches 1.
Choosing the Quotient Digits
A p-d plot for radix-2 division with d ∈ [1/2,1), partial remainder in [–d, d), and quotient digits in [–1, 1].
d p
Infeasible region (p cannot be ≥ 2d)
Infeasible region (p cannot be < −2d)
.100 .101 .110 .111 1.
00.1
00.0
11.1
10.0 10.1 11.0 01.1
01.0
−00.1 −01.0 −01.1 −10.0
d 2d
−2d −d Worst-case error
margin in comparison
Choose 1
Choose −1 Choose 0
−1 1
−1 max
−1 min
1 min 1max
0 max
0 min
OverlapOverlap
0
Use p-d plot to understand the q selection and derive the
needed precision
(number of bits
to look at).
Design of the Quotient Digit Selection Logic
4-bit adder
Combinational logic
Non0 Sign
Shifted sum = (u
1u
0. u
−1u
−2. . .)
2’s-complShifted carry = (v
1v
0. v
−1v
−2. . .)
2’s-complApprox shifted PR = (t
1t
0. t
−1t
−2)
2’s-complNon0 = t
1′ ∨ t
0′ ∨ t
–1′ = (t
1t
0t
−1)′
Sign = t
1(t
0′ ∨ t
−1′)
Radix-4 SRT Division
New versus shifted old partial remainder in radix-4 division with q
–jin [–3, 3].
Radix-4 fractional division with left shifts and q
–j∈ [–3, 3]
s
(j)= 4 s
(j–1)– q
–jd with s
(0)= z and s
(k)= 4
ks
|–shift–|
|–– subtract ––|
Two difficulties:
How do you choose from among the 7 possible values for q
−j? If the choice is +3 or −3, how do you form 3d?
–4d 4d
d
–d
4s
(j–1)–3 –2 –1 0 +1 +2 +3
s
(j)Building the p-d Plot for Radix-4 Division
A p-d plot for radix-4 SRT division with quotient digit set [–3, 3].
d p
Infeasible region (p cannot be ≥ 4d)
.100 .101 .110 .111
10.1
10.0
01.1
00.0 00.1 01.0 11.1
11.0
d 2d Choose 2
Choose 0 Choose 1
3
1
2 max
2 min
1 min
1 max
0 max ve O ap rl
0
3d 4d
Choose 3
3 min
2
ve O arl p
ve O arl p Uncertainty
region Uncertainty
region
Uncertainty region:
because of truncation.
The choice between q=3 or q=2
depends not
only the p but
also on one
bit, d
-2.
–4d 4d d
–d
4s
(j–1)–3 –2 –1 0 +1 +2 +3
s
(j)2d/3
–2d/3 8d/3
–8d/3
Restricting the Quotient Digit Set in Radix 4
Fig. 14.13 New versus shifted old partial remainder in radix-4 division with q
–jin [–2, 2].
Radix-4 fractional division with left shifts and q
–j∈ [–2, 2]
s
(j)= 4 s
(j–1)– q
–jd with s
(0)= z and s
(k)= 4
ks
|–shift–|
|–– subtract ––|
For this restriction to be feasible, we must have:
s ∈ [−hd, hd) for some h < 1, and 4hd – 2d ≤ hd
This yields h ≤ 2/3 (choose h = 2/3 to minimize the restriction)
d p
.100 .101 .110 .111
10.1
10.0
01.1
00.0 00.1 01.0 11.1
11.0
Choose 2
Choose 0
Choose 1
1
2 min
1 min 2 max
1 max
0 max
0 2
ve O a rl p
ve O a rl p Infeasible region
(p cannot be ≥ 8d/3)
8d/3
5d/3
4d/3 2d/3
d/3
Building the p-d Plot with Restricted Radix-4 Digit Set
A p-d plot for radix-4 SRT division with quotient digit set [–2, 2].
Depends
on d
General High-Radix Dividers
Carry v
CSA tree
Adder Divisor d
k k
Select q
–jShift left
2s Sum u
Multiple generation /
selection
Carry Sum
q
–j. . .
| | d q
–jor its complement
Process to derive the details:
Radix r
Digit set [–α, α] for q
–jNumber of bits of p (v and u) and d to be inspected
Quotient digit selection unit (table or logic)
Multiple generation/selection scheme
Conversion of redundant q to
2’s complement
15 Variations in Dividers
Chapter Goals
Discuss practical aspects of designing high-radix division schemes and cover other types of fast hardware dividers Chapter Highlights
Building and using p-d plots in practice Prescaling simplifies q digit selection Parallel hardware (array) dividers
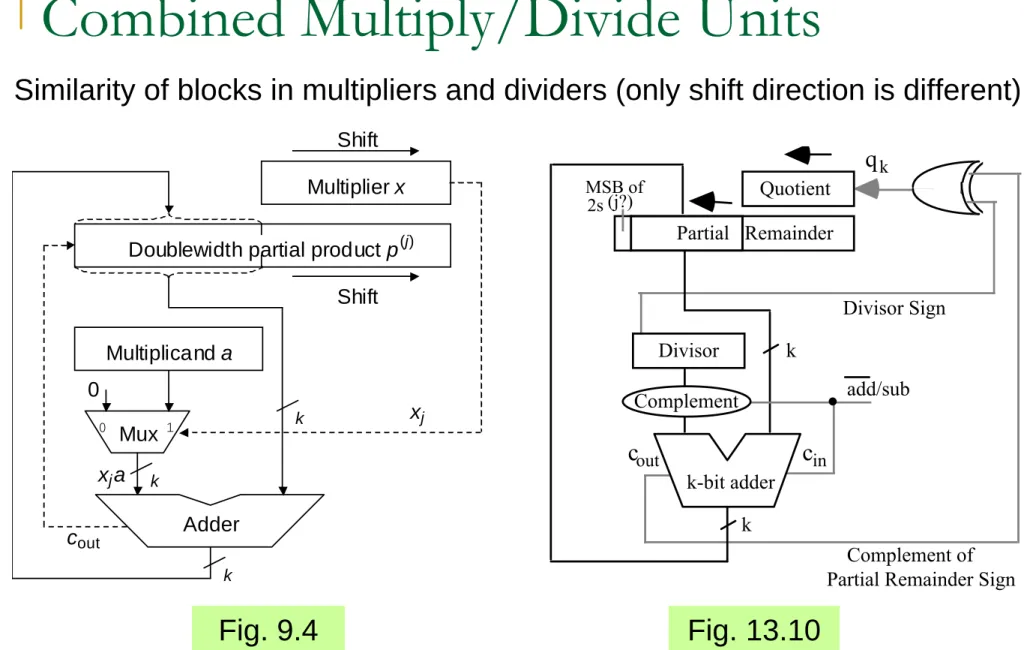
Shared hardware in multipliers/dividers
Square-rooting not special case of division
Quotient Digit Selection Revisited
Radix-r division with quotient digit set [–α, α], α < r – 1 Restrict the partial remainder range, say to [–hd, hd)
From the solid rectangle in Fig. 15.1, we get rhd – αd ≤ hd or h ≤ α/(r – 1) To minimize the range restriction, we choose h = α/(r – 1)
The relationship between new and shifted old partial remainders in radix-r division with quotient digits in [–α, +α].
–α
r s
(j–1)s
(j)r–1
rhd –rhd
hd
–hd
d
–d
–r+1 –1 0 1 α
rd
–rd – αd d –d 0 αd
Why Using Truncated p and d Values Is Acceptable
A part of p-d plot showing the overlap region for choosing the quotient digit value β or β+1 in radix-r division with quotient digit set [–α, α].
p
d Choose β + 1
Choose β
d min
Overlap region
(h + β + 1)d
A
(h + β)d
(–h + β + 1)d (–h + β)d
B
4 bits of p 3 bits of d
3 bits of p 4 bits of d
Note: h = α / (r – 1)
Standard p
xx.xxxx
Carry-save p
xx.xxxxx
xx.xxxxx
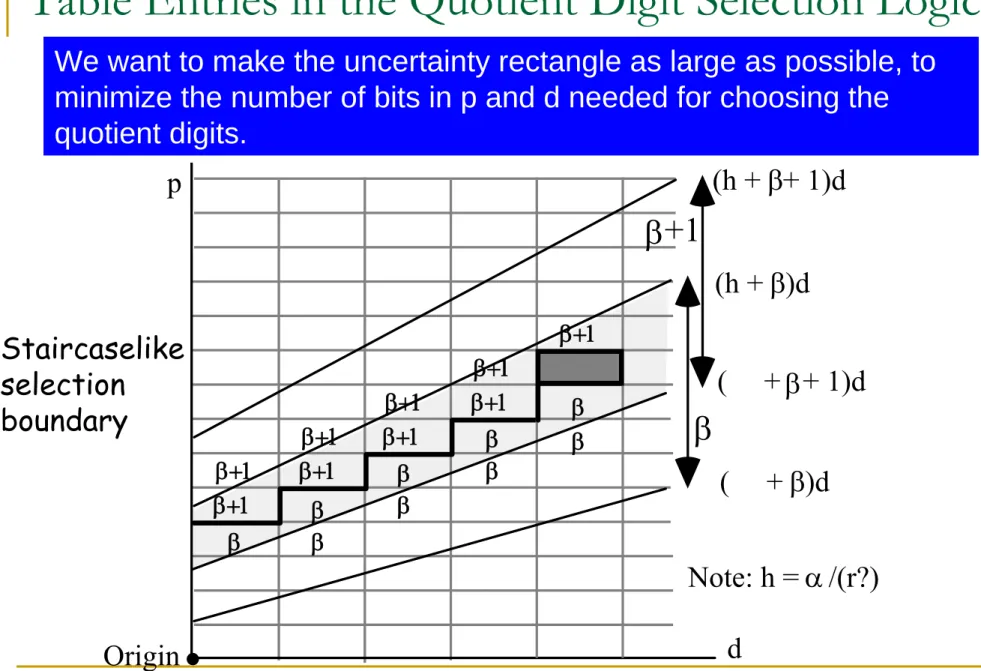
Table Entries in the Quotient Digit Selection Logic
We want to make the uncertainty rectangle as large as possible, to minimize the number of bits in p and d needed for choosing the quotient digits.
p
d
β +1
(h + )d
( + )d (h + + 1)d
( + + 1)d
Note: h = /(r?)
β
β
β
β
β α
β
β+1 β
β
β β
β β
β β β+1 β+1
β+1 β+1
β+1 β+1
β+1
β+1 or δ+1 δ
Origin
Staircaselike
selection
boundary
Using p-d Plots in Practice
Establishing upper bounds on the dimensions of uncertainty rectangles.
Δp p
d
Choose α
Choose α − 1
d
minOverlap region
(h + α − 1)d
(−h + α)d Δd
d
min+ Δd (h + α − 1) d
min( −h + α) d
minSmallest Δd occurs for the overlap region of α and α – 1
α +
−
= −
Δ h
d h
d min 2 1
) 1 2
min ( −
=
Δ p d h
Example: Lower Bounds on Precision
) 1 2
min ( −
=
Δ p d h
Fig. 15.4
Δp p
d
Choose α
Choose α − 1
d min
Overlap region
(h + α − 1)d
(−h + α)d Δd
d min + Δd (h + α − 1) d min
(−h + α) d min
For r = 4, divisor range [0.5, 1), digit set [–2, 2], we have α = 2, d
min= 1/2, h = α/(r – 1) = 2/3
Because 1/8 = 2
–3and 2
–3≤ 1/6 < 2
–2, we must inspect at least 3 bits of d (2, given its leading 1) and 3 bits of p
These are lower bounds (not truncated bits) and may prove inadequate In fact, 3 bits of p and 4 (3) bits of d are required
With p in carry-save form, 4 bits of each component must be inspected
8 / 2 1
3 / 2
1 3 / ) 4 2 / 1
( =
+
−
= −
Δd Δp = ( 1 / 2 )( 4 / 3 − 1 ) = 1 / 6
α +
−
= −
Δ h
d h
d min 2 1
Upper Bounds for Precision
Theorem: Once lower bounds on precision are determined based on Δd and Δp, one more bit of precision in each direction is always adequate
u Δp v
p
d w
Choose a
Choose a − 1
d
minOverlap region
w
(a − 1 + h)d
(a − h)d
Δd A
B
Proof: Let w be the spacing of vertical grid lines
w ≤ Δd/2 ⇒ v ≤ Δp/2 ⇒ u ≥ Δp/2
Some Implementation Details
The asymmetry of quotient digit selection process.
p
d
Choose β + 1
Choose β
d min A
B
d max
−β β + 1
Choose −β + 1 Choose −β
p
d β
β +1
β β
β β
β
δ β+1 β+1 β
β+1 β+1
β+1
β+1 orδ+1 δ
![Fig. 14.13 New versus shifted old partial remainder in radix-4 division with q –j in [–2, 2].](https://thumb-ap.123doks.com/thumbv2/9libinfo/9243955.504579/48.1263.259.1054.134.766/fig-new-versus-shifted-partial-remainder-radix-division.webp)