行政院國家科學委員會專題研究計畫 成果報告
偏光膜瑕疵自動檢測系統之開發
計畫類別: 個別型計畫
計畫編號: NSC94-2212-E-011-027-
執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日 執行單位: 國立臺灣科技大學高分子工程系
計畫主持人: 黃昌群
計畫參與人員: 湯燦泰 黃保綺
報告類型: 精簡報告
處理方式: 本計畫可公開查詢
中 華 民 國 95 年 10 月 17 日
行政院國家科學委員會補助專題研究計畫成果報告
偏光膜瑕疵自動檢測系統之開發
Development of an automated inspection system for polarizing film defects
計畫類別:
■
個別型計畫 □ 整合型計畫 計畫編號:NSC 94-2212-E-011-027執行期間:94 年 08 月 01 日至 95 年 07 月 31 日
計畫主持人:黃昌群 共同主持人:
計畫參與人員:湯燦泰 黃保綺
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立台灣科技大學高分子工程系
中 華 民 國 95 年 10 月 17 日
行政院國家科學委員會專題研究計畫年度報告 自動化學門專題計畫
計畫編號:NSC 94-2212-E-011-027
執行期限: 94 年 08 月 01 日至 95 年 07 月 31 日 主持人:黃昌群 台灣科技大學高分子工程系
E-mail: [email protected] 計畫參與人員:湯燦泰 黃保綺 一、中文摘要
由於偏光膜的廣泛應用,使得偏光膜日 益受到重視,其表面瑕疵檢測對提昇偏光膜 產品品質扮演很重要的角色。目前檢測是人 工方式進行,不但枯燥,且人眼疲勞極易造 成瑕疵判斷錯誤,因此本計劃利用影像處理 與分類器開發偏光膜瑕疵自動檢測系統,所 檢測偏光膜瑕疵包括雲狀色差、條狀色差、
點狀色差、刮痕與貼合不良,此皆為偏光膜 製程中常見的瑕疵種類。在影像處理過程 中,利用中值濾波器減少影像脈衝雜訊,由 於雲狀色差及條狀色差與正常灰階相近,無 法以一固定門檻值完整分割所有瑕疵類別,
故以統計式門檻值決定法選擇每張影像最佳 門檻值以完整分割出偏光膜瑕疵區域,並選 擇瑕疵區域之平均亮度、面積、熵值和之前 分割瑕疵的最佳門檻值做為瑕疵特徵,我們 搜集80 個樣本進行實驗,其中 20 個或 48 個 樣 本 做 為 倒 傳 遞 類 神 經 網 路 (Back-propagation neural network, BPNN)、理 想解類似度順序偏好法(Technique for order preference by similarity to ideal solutions, TOPSIS) 與 模 糊 類 聚 法 (Fuzzy c-means clustering algorithm, FCM)的資料庫,在 60 個 測試樣本中,其辨識率分別 98%、98%和 65%,而 32 個樣本之辨識率分別為 100%、
97%和 22%,驗證 BPNN 和 TOPSIS 即使以 較少樣本做為資料庫,也可獲得相當高辨識 率,兩者皆可成功應用於偏光膜瑕自動疵檢 測系統。
關鍵詞:偏光膜瑕疵,理想解類似度順序偏 好法,類神經網路,模糊類聚法,
影像處理,自動檢測
Abstract
Polarizing films receive a growing attention because of their extensive applications.
The inspection of their surface defects plays a critical role in leveling up product qualities.
Currently, polarizing film defects are inspected by the human, which is tedious and easily leads to wrong judgments due to tiredness of eyes.
This proposal applies image processing and appropriate classifiers to develop an automated inspection system for polarizing film defects.
The polarizing film defects include cloudy chromatism, stripy chromatism, spotted chromatism, scratches, and pasting wrong, which are commonly occurred during processing. In image processing, the median filter is used to reduce the impulse noise of images. Since gray levels of cloudy and stripy chromatisms are close to those of normal samples, we cannot segment entire defect-areas of five kinds of defects by a fixed threshold value. Therefore, the statistical threshold value decision method is used to choose an optimal threshold value of each image in segmenting the entire defect-area. Moreover, the average intensity, area, entropy of the defect area and the optimal threshold value in defect segmentation are selected as features. We gather a total of eighty samples for experiments.
Twenty or forty-eight samples of them are chosen for the data bases of the back- propagation neural network(BPNN), technique for order preference by similarity to ideal solutions(TOPSIS) and fuzzy c-means clustering algorithm(FCM). For the three classifiers, the recognition rates are 98%, 98%
and 65%, respectively for sixty testing samples and 100%, 97% and 22%, respectively for thirty-two testing samples. The BPNN and TOPSIS can achieve a high recognition rate even using fewer samples for the data base.
Both classifiers can be successfully applied to automated inspection systems for polarizing film defects.
Keywords:Polarizing film, Back-propagation neural network, Fuzzy c-means clustering algorithm, Technique for order preference by similarity to ideal solutions, Image processing, Automated inspection
二、緣由與目的
在偏光膜(Polarizing film)製造過程中,主 要可分成染色、拉伸、貼合、乾燥與整理等 步驟,而每個步驟皆有可能造成偏光膜瑕 疵,若以本計劃所探討的瑕疵而言,在染色 與乾燥製程中,容易形成雲狀、條狀與點狀 色差等瑕疵,所造成的原因有含浸的 I2 濃 度、含浸的 kI2濃度、含浸處理液的溫度與含 浸時間等製程參數;在貼合製程中常常造成 貼合不良的瑕疵;而拉伸製程與切割整理 中,容易產生刮痕瑕疵的原因,包括延伸PVA 膜的速度與延伸倍數等製程參數[1]。然而這 些常見的偏光膜瑕疵,需在加工製程後才會 顯現出來,且在檢測品質上並無一定的標 準,因此常常引起液晶顯示器(Liquid crystal display, LCD)產業之上、下游工廠的爭議;其 次製程中染色、延伸及成品表面,因異物混 入造成表面缺陷及染色時著色度不均,影響 到偏光膜的偏光度、透過率及耐久度,使得 偏光膜的品質降低[2-6],因此利用後段的偏 光膜外觀瑕疵檢測,分析前段製程所造成的 原因,進而提高製程安定性、偏光膜良率與 偏光膜光學性能。
目前產業檢測偏光膜瑕疵的方式,先將 兩片偏光膜相差90 疊合置於平面光板上,以0 人工方式進行外觀檢測,然而人工檢測是一 項高重覆性、枯燥乏味的工作,容易造成人 眼疲勞,判別取決於個人的經驗,沒有一定 準則,再則本計劃所探討偏光膜常見的瑕疵 種類中,如雲狀色差與條狀色差,瑕疵區域 與正常區域顏色相近、點狀色差瑕疵區域較 小、刮痕(Scratches)較細長等原因,皆可能造 成人工不易檢測而忽略其瑕疵,唯有檢測瑕 疵方法予以標準化,方可確保偏光膜產品品
質均一性,因此應用電腦視覺技術克服人工 檢測的缺失,亦是偏光膜外觀瑕疵自動檢測 發展的趨勢。此外,偏光膜的應用範圍相當 廣泛,除了LCD 之外,亦可用於太陽眼鏡、
攝影器材濾光鏡、防眩護目鏡、汽車車頭防 眩處理、光量調節器、偏光顯微鏡與特殊醫 療用眼鏡等用途,若能全面管制偏光膜外觀 品質,勢必擴大偏光膜應用的範圍並且增加 其效能,故本計劃所採用影像處理與分類的 技術,經由外觀檢測判定偏光膜雲狀色差、
條狀色差、點狀色差、刮痕與貼合不良常見 的瑕疵種類。
偏光膜影像經過中值濾波器消除雜訊 後,接著開始偵測偏光膜瑕疵的區域,其中 之一方式為決定一適當的門檻值,將正常區 域與瑕疵區域予以分割;一般採用蠻力法 (Brute-force)[7],利用直方圖(Histogram)在明 顯的波峰波谷灰階位置,找尋門檻值做為分 割瑕疵區域的依據,但本計劃所探討雲狀色 差與條狀色差與正常的灰階相近,且每一類 瑕疵影像灰階分布直方圖的波谷處不明顯,
無法依蠻力法決定一門檻值而將每一類瑕疵 分割完整,必需藉由動態門檻值決定法分割 瑕疵區域,即依每一張影像灰階差異決定其 自身門檻值,常用的門檻值決定法,包含統 計式(Statistical)、消息理論式、動差守恆式 (Moment-preserving) 與 最 近 配 對 式 (Pairwise nearest neighbor)等四種。Otsu[8]從統計的觀 點,提出最佳門檻值的決定必需滿足這兩個 條件,第一個是每一群族之間的變異數和為 最大,此意味著群與群之間距離是分得最 開,第二個是每一群族本身的變異數和為最 小,表示每一群本身的灰階是最近似的,依 此條件決定影像的最佳門檻值;Kapur 等人[9]
採用一個類似Otsu 的概念,使用消息理論的 平均消息量,亦稱為熵(Entropy),量度此影 像分割的門檻值;Tsai[10]提出動差守恆的概 念,原始影像經門檻值分割後,灰階範圍從 原來的 0 至 255 降到少數幾個灰階值,而分 割 後 的 影 像 仍 具 有 原 始 影 像 的 某 些 動 差 (Moment)值,期許經過運算後能夾帶更多的 訊息;由於統計式或消息理論式的門檻值決 定法,在選擇兩個以上的門檻值時,其時間 複雜度相當地高,而Chung 與 Chen[11]提出
最近配對式門檻值決定法,可改善執行的速 度與保留重要特徵兩大優點。綜合以上所 言,從執行速度與處理後的影像品質一起考 量時,在門檻數目大於或等於 2 時,最近配 對式是一個不錯的選擇,若門檻數目等於 1 時,建議使用統計式或消息理論式來進行影 像的分割[7],故本計劃採用統計式來決定最 佳門檻值,以完整分割出偏光膜的瑕疵區域。
瑕疵分類主要的概念,是透過影像特徵 (Feature)的抽取,依照這些瑕疵特徵經由分類 器區分瑕疵的類別,一般分類器可分成監督 式與非監督式兩大類[12],依不同特徵選擇不 同的分類器,達到瑕疵影像分類之目的。根 據文獻記載,影像特徵抽取與分類技術應用 的領域非常地廣泛,Tsai 等人[13]利用灰階共 用矩陣,擷取梭織物瑕疵六個紋理特徵,以 倒傳遞類神經網路做為分類器,可辨識正常 布面、棉結、斷經、斷緯和油污等五種梭織 物瑕疵;Chen[14]以光譜傅立葉轉換的影像 處理方式,計算 X 軸與 Y 軸上的功率譜 (Power spectra),選取 93 個重要的特徵值,
輸入倒傳遞類神經網路進行 13 種瑕疵的分 類,其中以油污、軋梭與緯紗結圈等三種瑕 疵,最容易產生辨識錯誤;Shiau 等人[15]將 棉網影像做三值化處理,分割棉網、棉粒、
雜質的影像外形,計算棉粒與雜質的個數與 面積,應用倒傳遞類神經網路作為分類器,
其 辨 識 率 可 達 99.63 % ; Krishnapuram 與 Keller[16] 論 述 模 糊 聚 類 法 大 多 源 自 於 Bezdek 的 C-平均模糊聚類法,其方法與衍生 法成功地被應用影像上,特別是在樣本分類 (Pattern classification) 與 影 像 分 割 (Image segmentation)上;Chiang 和 Hsu[17]在資料分 析上,整合模糊分類器與決策樹(Decision tree),預測每個種類的可能性,取代決定單 一種類的方法;Su 與 Chou[18]採用點對稱距 離(Point symmetry distance)量測的觀點,修正 模糊聚類法於資料聚類(Data clustering)與人 臉檢測上;根據上述文獻的記載,倒傳遞類 神經網路與C-平均模糊聚類法為常用的兩種 分類器。
從距離量測的觀點,亦有許多文獻探討 分類的問題,Liu[19]搜集 1034 個人臉影像,
以貝氏(Bayesian)分類器為基本架構,若使用
機率密度函數(Probability density functions) 可找尋出 887 個人臉影像,而貝氏辨別特徵 (Bayesian discriminating features) 可 找 尋 出 1018 張影像,成功地提高人臉的檢測的精確 性;Windyga[20]運用小波架構與最小分類誤 差(Minimum classification error)訓練方法於 織 物 的 瑕 疵 分 類 , 計 算 歐 幾 里 德 距 離 (Euclidean distance)做為分類之依據,在 329 種瑕疵樣本與 328 非瑕疵樣本中分類出九種 的瑕疵類別,辨識率可達93.1%;Amet 等人 [21]結合小波理論與共生矩陣方法,將纖維織 物瑕疵影像作分割,擷取四種共生矩陣特徵 值,藉由馬氏距離(Mahalanobis distance)法對 影像做瑕疵分類;Liu[22]利用紅外線影像來 檢測印刷電路板(Printed circuits boards)點焊 之瑕疵,將資料轉換成灰階特徵值,分別計 算統計指標平均值與標準差,應用最小距離 (Minimum distance)法的歐幾里德距離進行 點焊瑕疵分類;Alapurane 與 Westman[23]以 層 級 向 量 連 接 元 件 (Hierarchical vector connected components)來分割木製品外觀瑕 疵,並採用一般與改良式的 K 鄰近區域 (Nearest-neighbor)分類器進行瑕疵分類,辨識 率可達85-90%;李[24]比較 K 個最鄰近法、
線性辨別分析法(Linear discriminant analysis) 和馬氏距離法等統計分類器,與倒傳遞類神 經 網 路 、 放 射 基 準 機 能 網 路(Radial basis function) 和 學 習 向 量 量 化 網 路 (Learning vector quantization)等類神經分類器,評估分 類的正確率。
綜合以上文獻所言,目前現有的分類器 包括類神經網路、模糊聚類、貝氏法、馬氏 距離法、最小距離法、鄰近區域法、線性辨 別分析法與決策樹等,分類器皆以距離量測 觀點做為瑕疵分類的依據,而理想解類似度 順序偏好法(Technique for order preference by similarity to ideal solutions, TOPSIS)[25]亦利 用歐幾里德距離量測概念做為決策方案之排 序,常被應用於資訊業、服務品質、半導業、
油田開發、國際行銷、港口位置選擇與多重 品質評準等領域的決策系統中,其演算法是 計算群體中的理想解與負理想解,以評估方 案的優劣順序,即可決定所選擇方案為距離 理想解最近,而距離負理想解最遠,因此本
計劃依此概念將 TOPSIS 法應用於瑕疵分類 器上,衡量每個瑕疵測試樣本與理想解的相 對距離,找尋瑕疵種類排序中最小值做為瑕 疵辨識的依據,最後利用不同數量的瑕疵測 試樣本,評估TOPSIS、類神經網路與模糊類 聚法三種分類器的辨識能力。
本計劃探討常見瑕疵包括雲狀色差、條 狀色差、點狀色差、刮痕與貼合不良,首先 採用影像前處理的中值濾波器減少影像雜 訊,統計式門檻值決定法選擇最佳閥值分割 偏光膜瑕疵的區域,選擇瑕疵區域之平均亮 度、面積、熵及分割門檻值做為瑕疵特徵,
應用 TOPSIS 法、倒傳遞類神經網路與模糊 類聚法分類器進行瑕疵種類分類,依據不同 數量20 個或 48 個的訓練樣本,探討其對測 試樣本之辨識結果。結果顯示即使在較少訓 練樣本情況下,TOPSIS 與 BPNN 幾乎可成 功辨識所有的測試樣本。
三、研究方法
本計劃以影像處理配合分類器來檢測 偏光膜表面瑕疵,而這些瑕疵中,每種瑕疵 具有其獨特之特徵,因此在進行這些瑕疵檢 測時,先利用影像處理擷取瑕疵特徵,以 TOPSIS 法為分類器,計算測試樣本與每一類 瑕疵訓練樣本群特徵值的距離,判定距離最 短的瑕疵類別為測試樣本的瑕疵種類,最後 與常被應用在影像分類的倒傳遞類神經網路 和模糊類聚法比較,在不同數量訓練樣本條 件下,評估各個分類器的辨識性能,驗證本 計劃所提 TOPSIS 法可應用於偏光膜瑕疵之 分類。茲將研究方法與進行步驟分成搜集樣 本與影像擷取、影像中值濾波器、瑕疵影像 分割、瑕疵特徵擷取與瑕疵分類器,詳述如 下:
3.1 搜集樣本與影像擷取
本計劃建構偏光膜瑕疵自動檢測系統 之機構,將標準偏光膜裝置於彩色攝影機鏡 頭中,而偏光膜測試樣本置於平面光板上,
兩片偏光膜相差90 度擺放,利用背光源照射 通過測試偏光膜與標準偏光膜,將測試樣本 的影像投射至彩色攝影機中,如圖 1 所示,
傳送至電腦中儲存瑕疵影像,圖形大小為 256
256× 像素,搜集25 個雲狀色差、9 個條 狀色差、26 個點狀色差、11 個刮痕與 9 個貼 合不良常見偏光膜的瑕疵種類,總共80 個偏 光膜瑕疵樣本。
3.2 中值濾波器
在進行影像處理過程中,因光源、照片顆 粒雜訊、資料傳輸誤差及光電轉換過程所產 生的雜訊等因素的影響,而造成影像受到雜 訊的干擾,增加分析上的困難,亦可能導致 檢測分析過程中的錯誤,無法正確地獲得真 實影像處理後的結果,因此檢測前需要對影 像品質進行改善,而在影像消除雜訊方面,
濾波器是最簡單且最實用的方法。若以空間 線性濾波器而言,低通濾波處理可衰減影像 中高頻的部份,使影像平均鄰近區域的灰階 值趨於平滑,雖可降低雜訊但影像邊緣和細 節區域造成擴散與模糊;高通濾波強化影像 中高頻部份產生銳化的效果,獲得較佳的影 像邊緣,但雜訊卻無法有效地消除;對於傳 統線性濾波器的缺點,已有許多非線性濾波 技術被提出討論與分析,而中值濾波器是最 常被用來消除雜訊,不僅可用來過濾孤立的 雜訊,更可保留原始影像的銳利度,克服線 性濾波器在處理脈衝干擾及掃描雜訊的問 題,所以中值濾波器是最常被使用來消除雜 訊的方式,得到較接近真實的影像。其運算 流程先將像素及其周圍若干鄰近像素,按照 灰階值大小依次進行排序,取序列中間值作 為該像素的灰階值,使它更接近鄰域,並且 有效地消除孤立濾波遮罩內灰階值的突鋒訊 號,例如濾波器使用3×3大小的遮罩,將圖 2 中的九個灰階值,從小排到大的序列{1, 1, 2, 2, 2, 2, 3, 3, 200},此序列的中值為 2,利用 此中值將圖中(1, 1)位置之灰階值 200 取代,
完成中值濾波器處理的流程。
3.3 瑕疵影像分割
一般影像分割可依據每一個區域中具 有相似或相同的灰階、紋理等特性,而在區 域邊界變化較為劇烈,將影像分割成數個不 同特性的區域,影像分割的方式可依據邊緣 偵測的概念,檢測出局部不連續的區域而連
成邊界,利用這些邊界將影像分成不同的區 域;或者以區域成長的方式,結合相似特性 的像素分成數個不同區域。然而本計劃所檢 測偏光膜雲狀與條狀色差瑕疵之影像,每個 區域的差異不是非常明顯,表示邊界與邊界 之間並無強烈變化,若以固定門檻值做為分 割瑕疵的準則,將無法完整分離所有五種偏 光膜瑕疵的瑕疵區域,因此本計劃擬採用 Otsu 所提的統計式門檻值決定法來決定門檻 值,以分離正常與瑕疵的區域範圍。
根據相關文獻記載,Otsu[26]從統計的 觀點,決定最佳門檻值必需滿足兩個條件,
第一個是每一群族之間的變異數和為最大,
此意味著群與群之間距離是分得最開,第二 個是每一群族本身的變異數和為最小,表示 每一群本身的灰階是最近似的,依此條件試 圖決定影像的最佳門檻值;而本計劃利用所 得最佳門檻值T ,將影像中的像素分成正常∗ 與瑕疵區塊,如圖3 所示的C1與C2,在C1區 內 的 任 一 像 素 其 灰 階 值 f(x,y) 必 定 滿 足
≤ ∗
≤ f(x,y) T
0 ,且C2區內的任一像素其定 滿足T∗+1≤ f(x,y)≤255。
令影像的大小 N 為影像寬度乘以影像高 度,且灰階值範圍為0≤i≤I −1,I 表示灰階 個數共有 256 個,而灰階值 i 的機率表示成
N i n
P()= i ,此處n 表示在影像中灰階值 i 出i 現 的 次 數 , 又 依 據 機 率 原 理 可 獲 得
1 ) (
1 0
∑− =
= I
i
i
P ,假設C1內的像素個數所佔有比例
為 ∑∗
=
= T
i
i P
0
1 ()
ω ,而C2內的像素個數所佔有比
例 為
∑
−+
= ∗
= 1
1
2 ( )
I
T i
i
ω P , 以 上 二 式 必 滿 足
2 1
1+ω =
ω 。 此 時 便 可 算 出C1的 期 望 值 為
∑∗
=
×
= T
i
i i U P
0 1
1
) (
ω , 而 C2 的 期 望 值 為
∑
−+
= ∗
×
= 1
1 2
2
) (
I
T i
i i U P
ω ,利用 U1和 U2,進一步計 算C1和C2本身的變異數可表示為
∑∗
=
−
= T
i
i U P i
0 1
2 1 2
1
) ) (
( ω
σ (1)
∑
−+
= ∗
−
= 1
1 2
2 2 2
2
) ) ( (
I
T i
i U P
i ω
σ (2)
此 時 C1 和 C2 本 身 的 變 異 數 和 為
2 2 2 2 1 1
2 ωσ ωσ
σW = + ,在C1和C2之間的變異數 可表示為
2 2
2 2 1
1
2 = ( − T∗) + ( − T∗)
B ω U U ω U U
σ (3)
其中UT∗表示整個原始影像的平均值,可表 示為 ∑−
=
= ×
∗
1 0 I
i i
T N
i
U n 。最後,在σW2 、σB2、σT2∗
之間必定滿足此關係σW2 +σB2 =σT2∗,其中σT2∗
為原始影像的變異數且為一固定值,故本計 劃僅需找到一個門檻值T 使得∗ C1和C2本身 變異數和為最小,或者C1和C2之間變異數和 最大即可,其演算法是從 0 至 255 的範圍逐 一設定為灰階門檻值,從之間找尋最小的σW2 值,其相對應的灰階值T 為原始影像分割∗ C1 和C2兩區的最佳門檻值。
3.4 瑕疵特徵擷取
在擷取瑕疵特徵前,一般常會從瑕疵的 形狀、大小、發生位置、紋理及顏色等方向 觀察影像,而本計劃所檢測常見偏光膜瑕疵 包括雲狀色差、條狀色差、點狀色差、刮痕 與貼合不良,選擇瑕疵區塊的面積、亮度平 均值、熵(Entropy)值與之前瑕疵分割最佳門 檻值T 為偏光膜瑕疵特徵,計算所獲得的瑕∗ 疵特徵值,應用 TOPSIS 法、倒傳遞類神經 網路及c-平均模糊聚類法分類。
(1)瑕疵區域面積(A)
原始影像經二值化分割後,計算瑕疵影 像封閉曲線內像素數的總合,即為瑕疵的面 積 A。
(2)瑕疵區域亮度平均值( p )
A j i p p
g g
N
i N
i
∑ ∑
−=
−
= = 1 0
1 0
) , (
(4)
其中為 p( ji, )瑕疵區域像素(i,j)之灰階值,
N 為瑕疵影像之大小。 g
(3)熵(ENT)
∑ ∑−
=
−
=
−
=
1 0
1 0
) , ( log ) , (
g g
N
i N
j
j i g j
i g
ENT
∑ ∑−
=
−
=
= 1
0 1 0
) , (
) , ) (
,
( Ng g
i N
j
j i p
j i j p
i
g (5)
其中g( ji, )為對應像素(i,j)灰階值正規化後 的數值,此項參數是計算影像灰階矩陣中,
元素排列混亂的程度,當影像灰階矩陣中所 有元素較平均的分佈在各個角落時,此項的 特徵值為較小,而當所有元素較聚集在同一 個地方時,則有較大值。
3.5 瑕疵分類器
本計劃搜集五種瑕疵共 80 個偏光膜瑕 疵樣本,在不同數量進行訓練與測試,第一 個以 20 個為訓練樣本,60 個為測試樣本,
第二個以 48 個為訓練樣本,32 個為測試樣 本,以便探討 TOPSIS 法、倒傳遞類神經網 路與模糊類聚法三種瑕疵分類器之辨識率。
(1)TOPSIS 法[27]
定義四種特徵值之理想解(Positive-ideal solutions)是由五種瑕疵訓練樣本群特徵值與 測試樣本特徵值之間距離最小所組成的集 合,負理想解(Negative-ideal solutions)是特徵 值距離最大所組成的集合,依照歐幾里得計 算距離的方式,衡量測試瑕疵與理想解和負 理想解的距離,再逐一求出與每個理想解之 相對距離,最後從 TOPSIS 指標中找尋最小 的 距 離 , 作 為 辨 識 瑕 疵 種 類 的 依 據 ; 而 TOPSIS 法採用理想解相對接近值排列各瑕 疵的優先順序,其優點能同時考慮理想解及 負理想解的情況,可避免一瑕疵距離理想解 最近,同時距離負理想解也最近的問題,達 到分類器區分瑕疵種類之目的。然而TOPSIS 法乃是考慮每個測試瑕疵樣本與理想解和負 理想解的距離,俾使測試瑕疵距離理想解最 近,而離負理想解最遠,其分析過程如下所 示:
步驟一:建立各瑕疵訓練樣本群與測試樣本 瑕疵特徵值之間的距離矩陣
本計劃定義式(6)分別計算測試樣本與 各類瑕疵中訓練樣本群特徵值的距離d , ij
n h d
n
k
ijk ij
∑=
−
= 1
)2
( λ
, i=1,2,...,m, l
j=1,2,..., (6) 其中瑕疵族群數量 m 為 5,表示偏光膜常見 五種瑕疵,瑕疵特徵數量 l 為 4,表示四種瑕 疵特徵,h為測試樣本特徵值,λijk為訓練樣 本特徵值,n 為訓練樣本中同一種瑕疵種類 λijk的個數,最後可得一5×4的距離矩陣,如 式7 所示。
⎥⎥
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎢⎢
⎣
⎡
=
54 53 52 51
44 43 42 41
34 33 32 31
24 23 22 21
14 13 12 11
d d d d
d d d d
d d d d
d d d d
d d d d
D (7)
步驟二:距離矩陣正規化
將距離矩陣予以正規化,可避免因數值 大 的 特 徵 值 主 導 瑕 疵 辨 識 的 方 向 ; 利 用 TOPSIS 法轉換資料的方式如下:
∑=
= m
i ij ij ij
d R d
1 2
(8)
步驟三:將距離矩陣乘以瑕疵特徵的權重值 各個瑕疵特徵的權重方面,則憑藉設計 者專業經驗給定,本計劃選擇四個特徵值權 重皆為0.25,再將R 乘以加權值(ij W )形成另j 一新的決策矩陣,如式(9)所示。
ij j
ij W R
V = (9)
步驟四:決定理想解和負理想解
在相同特徵中,測試樣本與所有可供評 選瑕疵族群距離最短,以A+j表示為理想解,
代表測試樣本與某一類瑕疵特徵最類似,將 所有特徵組合而成最理想解集合。
} 4 ,.., 1
| 5 ,.., 1 ,
{min = =
=
+ V i j
A ij (10)
在相同特徵中,測試樣本與所有可供評 選瑕疵族群距離最遠,以A−j表示為負理想 解,代表測試樣本與某一類瑕疵特徵最不類 似,將所有特徵組合而成負理想解集合。
} 4 ,.., 1
| 5 ,.., 1 ,
{max = =
=
− V i j
A ij (11)
步驟五:計算各瑕疵族群與理想解和負理想 解間的距離
計算分離度第 i 類瑕疵與理想解集合 A 之間的距離可表為 +
∑=
+
+ = 4 −
1
)2
(
j
j ij
i V V
S (12)
計算分離度第 i 類瑕疵與負理想解集合 A 之間的距離可表為 −
∑=
−
− = 4 −
1
)2
(
j
j ij
i V V
S (13)
步驟六:計算各瑕疵與理想解之相對距離。
求出各類瑕疵距離理想解之遠近程度 L ,如式(14)所示,最小值使測試瑕疵距離i
理想解最近,而離負理想解最遠,即可區分 測試樣本歸屬第 i 類瑕疵。
− +
+
= +
i i
i
i S S
L S (14)
(2) 倒 傳 遞 類 神 經 網 路 (Back-propagation neural network)
根據倒傳遞類神經網路的學習過程,一 次以一個訓練樣本的方式進行,每一層的神 經元只接受來自前一層各神經元的輸出向量 作為輸入向量,乘以加權值再減掉偏權值,
經由雙曲線轉換函數轉換成另一新值,輸出 至下一層神經元,直至輸出層為止,將所有 訓練樣本都學習過一次,即可稱為一個學習 回合,網路將訓練樣本反覆學習,直至網路 學習達到所要求的收斂範圍內為止。在整個 網路學習過程中,以學習因子控制每次最陡 坡降法最小誤差函數之步幅,進而調整加權 值及偏權值大小;當輸入每一個訓練樣本 時,網路小幅度調整神經元與神經元之間的
加權值大小,與修正隱藏層和輸出層之偏權 值,然而網路學習過程中,有時會發生落入 局部極值的問題,或產生加權值修正過大或 不足的情形,此時必須以慣性因子來解決此 問題,改善收斂過程中振盪的現象,期許訓 練達到收斂範圍內為止。
本計劃將偏光膜瑕疵樣本在不同數量 進行訓練與測試,在網路學習階段,網路架 構設定為輸入層四個節點,分別代表平均亮 度、面積、熵及最佳門檻值,隱藏層四個節 點與輸出層五個節點,分別為雲狀色差、條 狀色差、點狀色差、刮痕與貼合不良,而本 計劃以均方根誤差(Root mean squared error, RMSE)量測誤差差距[28],決定網路訓練的 誤差程度是否收斂,如式(15)所示:
N M
Y T RMSE
M
i N
j
ij ij
×
−
=
∑∑
=1 =1
)2
(
(15)
其中 M 為訓練樣本總數,N 為輸出層神經元 數目,T 為第ij i個樣本第 j 個輸出神經元的目 標輸出值,Y 為第ij i個樣本第 j 個輸出神經元 的推論輸出值。最後根據訓練所得的類神經 網路進行瑕疵分類,測試執行速度與辨識 率,完成應用類神經網路於偏光膜瑕疵分類 之步驟。
(3)模糊類聚法
在1981 年 Bezdek[29]提出 c-平均模糊類 聚 法 (Fuzzy c-means clustering algorithm, FCM),之後常被用於影像處理的影像分類 上,其做法是將一連串未知或不確定影像資 訊,經過模擬矩陣反覆運算,達到接近績效 指數(Performance index)最小化,找出最佳 的分類聚集中心(Cluster center),最後,依 據不同影像之特徵,分析每個影像的類別。
一個由n個向量資料所形成的圖形集合 }
,..., ,..., ,
{x1 x2 xk xn
X = , 其 中 x 為 一 向 量k
[ k k kp] p
k x x x R
x = 1 2 . . ∈ ,假設在 P 維 空間,若將圖形集合做 c 群的模糊分割,即
} ,..., ,..., ,
{ 1 2 i c
P= µ µ µ µ , 其 中 µi 必 須 滿 足
∑ ( )
= c =
i
k i x
1
µ 1及
∑
( )=
<
< n
i
k
i x n
1
0 µ 之條件;為求
最佳類聚中心點v ,藉由資料點i x 至類聚中k 心點之距離與資料點歸屬於某一類聚之程 度,Bezdek[30]定義模糊虛擬分割 P 的績效 指數(Jm(P))為
[
( )]
∑∑= =
−
= n
k c
i
i k m k i
m P x x v
J
1 1
) 2
( µ (16)
其中 xk −vi 2表示x 至k v 的歐幾里德距離。i 此績效指數是一種量測的方法,它將所屬類 聚內的所有資料點與各類聚中心點距離的加 總,當Jm(P)愈小時,表示模糊分割的效果 愈佳,因此,FCM 就是在尋找最小績效指數
) (P
Jm 的模糊分割。根據式(16)針對類聚中心 與歸屬度各別進行偏微分求極值,若模糊分 割的中心點位置為v1,v2,...,vi,...,vc,而第 i 個 類聚中心點的一般式為:
[
( )] [
( )]
∑
∑
=
= =n
k
m k i n
k
k m k i i
x x x v
1 1
µ µ
, 1≤ m≤∞ (17)
其中m為類聚加權值,作為類聚間的分離指 數;當m→∞時,分離結果愈模糊,而m→1 時,分群結果愈明顯。m值大小尚無任何理 論上的判斷標準,一般m值取 2。由式(17) 可知類聚中心點v 是類聚歸屬度i µi的平均權 重,亦是資料點x 在第k m階對模糊集合的歸 屬度,其歸屬度 µi為
( )
1
1
1 1
2 2
−
=
−
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
−
= ∑c −
j
m
j k
i k k
i
v x
v x x
µ (18)
四、實驗結果與討論
本計劃建構偏光膜瑕疵自動檢測系統 之機構,如圖1 所示,搜集 80 個偏光膜瑕疵 影像,其中25 個雲狀色差、9 個條狀色差、
26 個點狀色差、11 個刮痕與 9 個貼合不良常 見 瑕 疵 種 類 , 而 每 一 個 圖 形 大 小 皆 為
256
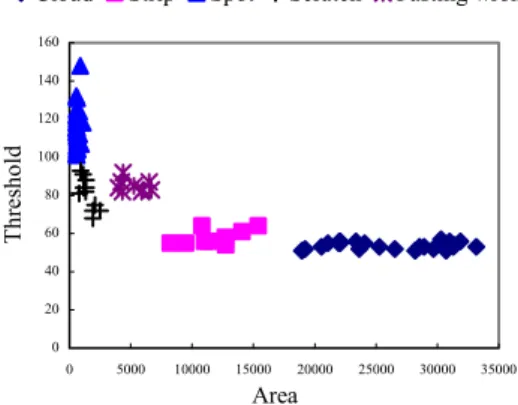
256× 像素。本計劃應用影像處理技術,
選擇最佳門檻值、瑕疵面積、瑕疵平均亮度
及熵四個特徵為檢測系統的輸入參數,其結 果如圖4 與 5 所示,而雲狀色差、條狀色差、
點狀色差、刮痕與貼合不良五個瑕疵種類為 檢測系統的輸出參數,應用倒傳遞類神經網 路、TOPSIS 法與模糊類聚法三種分類器進行 辨識分析。在學習分類階段,倒傳遞類神經 網路輸入層節點為四個特徵值,輸出層節點 為五個瑕疵,隱藏層設為六個節點,在網路 的學習訓練過程中,根據目標值與預測值間 的誤差,以最小陡坡度法調整網路的加權值 與偏權值,其中學習次數設定 10000 次,學 習樣本為20 個,因考量學習速率 η 及慣性因 子 α 值太大,會造成運算過程無法收斂,將 無法達到指定的 RMSE,最後經由試誤法決 定學習速率η 為 0.8,慣性因子 α 為 0.3,而 RMSE 值收斂至 0.004,即可獲得學習階段網 路的加權值及偏權值,依此網路結果進行回 想測試,以60 個瑕疵樣本進行分析,結果顯 示60 個樣本中有 1 個刮痕瑕疵誤判為貼合不 良 , 其 網 路 輸 出 值 為(0.0, 0.0, 0.0, 0.699, 0.701),其辨識率高達 98%;若學習樣本為 48 個時,決定網路相關參數分別為學習次數 設定10000 次、學習速率 η 為 0.8、慣性因子 α 為 0.3,而 RMSE 值收斂至 0.003,以 32 個 瑕疵樣本進行測試,其辨識率高達100%。
本計劃採用TOPSIS 分類器時,先以 20 個做為分類樣本的基準,其中 7 個雲狀色 差、2 個條狀色差、7 個點狀色差、2 個刮痕 與 2 個貼合不良,利用 60 個數據為測試樣 本,其中18 個雲狀色差、7 個條狀色差、19 個點狀色差、9 個刮痕與 7 個貼合不良,將 每一個測試樣本代入式(6)中,計算與基準樣 本之差距,再應用 TOPSIS 分類器計算與理 想解之相對距離,如式(14)所示,其中每一個 瑕疵特徵權重值皆為0.25,最後在 60 個數據 之分類結果,只有 1 個分類錯誤,將刮痕辨 識為貼合不良,其輸出值為(0.69, 0.32, 0.44, 0.12, 0.11),極小值為 0.11 代表貼合不良瑕 疵,故 TOPSIS 分類器之辨識率高達 98%;
若以 48 個做為分類樣本的基準,其中 16 個 雲狀色差、4 個條狀色差、17 個點狀色差、7 個刮痕與4 個貼合不良,利用 32 個數據為測 試樣本,其中9 個雲狀色差、5 個條狀色差、
9 個點狀色差、4 個刮痕與 5 個貼合不良,每
一個瑕疵特徵權重值皆為0.25,最後在 32 個 數據之分類結果,只有 1 個分類錯誤,將刮 痕辨識為貼合不良,其輸出值為(0.66, 0.30, 0.43, 0.12, 0.09),辨識率高達 97%。
本計劃採用FCM 分類器時,先以 20 個 做為分類樣本的基準,類聚加權值為 2.25,
使用式(17)計算聚類中心,其結果分別為 v1={76, 6714.1, 74.33, 1057.3},v2={56, 30369, 53.33, 4437.4} , v3={57.56, 2149, 53.29, 3411.9},v4={74.49, 15491, 63.68, 1951.5},
v5={107.44, 871.01, 106.67, 133.11},利用 60 個數據為測試樣本,將每一個測試樣本代入 式(18)中,計算每個樣本各屬於某群的模糊歸 屬度,最後在 60 個數據之分類結果,共有 21 個分類錯誤,將 8 個雲狀辨識為條狀,6 個條狀辨識為貼合不良,4 個刮痕辨識為點 狀,3 個貼合不良辨識為刮痕,其辨識率為 65%;若以 48 個做為分類樣本的基準,類聚 加權值為 2.25,其結果分別為 v1={79.85, 6084.7, 78.22, 959.96},v2={60, 21960, 54.33, 3495.5} , v3={103.54, 824.89, 107.16, 127.26},v4={65.86, 12061, 58.44, 1721.9},
v5={59.14, 30306, 53.57, 4655.3},利用 32 個 數據為測試樣本,共有25 個分類錯誤,將 2 個雲狀辨識為條狀,1 個雲狀辨識為刮痕,2 個條狀辨識為點狀,3 個條狀辨識為刮痕具 有,9 個點狀辨識為貼合不良,4 個刮痕辨識 為貼合不良,4 個貼合不良辨識為點狀,其 辨識率為22%。
五、結論
本計劃應用倒傳遞類神經網路、TOPSIS 與FCM 三種分類器,將 80 個樣本分成學習 樣本與測試樣本,分別為20/60 與 48/32 個,
進行學習與分類測試,從辨識率結果中發現 BPNN 與 TOPSIS 優於 FCM 分類器;即使學 習樣本較少時,可使用TOPSIS 與 BPNN 分 類器,提高偏光膜瑕疵分類的辨識率。
六、參考文獻:
1. 李世彪,實驗計畫法在碘系偏光膜延伸 染色製程條件之研究,國立台北科技大 學有機高分子研究所碩士論,1999。
2. F. Keilmann, “Polarizer for infrared radiation”, United states patent 5177635, 1993.
3. H. L. Garvin and D. A. Pinnow, “High selectivity thin film polarizer”, United states patent 4289381, 1981.
4. 宋大成,簡介偏光膜,工業材料,140 期,第118-126 頁,1998。
5. 黃朝義,偏光膜介紹,光電產業與技術 情報,20 期,第 40-47 頁,1999。
6. 劉怡君,偏光膜的原理及應用,工業材 料,188 期,第 153-159 頁,2002。
7. 鍾國亮,影像處理與電腦視覺,東華書 局,2004。
8. N. Otsu, “A threshold selection method from gray level histogram”, IEEE Transactions on Systems, Man and Cybernetics, SMC-8, pp. 62-66, 1978.
9. J. N. Kapur, P. K. Sahoo and A. K. C.
Wong, “A new method for gray-level picture thresholding using the entropy of the histogram”, Computer Vision, Graphics and Image Processing, Vol. 29, No. 3, pp. 273-285, 1985.
10. W. H. Tsai, “Moment-preserving thresholding: a new approach”, Computer Vision, Graphics and Image Processing, Vol. 29, No. 3, pp. 377-393, 1985.
11. K. L. Chung and W. Y. Chen, “Fast adaptive PNN-based thresholding algorithms”, Pattern Recognition, Vol. 36, No. 12, pp. 2793-2804, 2003.
12. R. O. Duda, P. E. Hart and D. G. Stork,
“Pattern classification – second edition”, John Wiley & Sons, 2001.
13. I. S. Tsai, C. H. Lin and J. J. Lin,
“Applying an artificial neural network to pattern recognition in fabric defects”, Textile Research Journal, Vol. 65, No. 3, pp. 123-130, 1995.
14. P. W. Chen, “Classifying textile faults with a back-propagation neural network using power spectra”, Textile Research Journal, Vol. 68, No. 2, pp. 121-126, 1998.
15. Y. R. Shiau, I. S. Tsai and C. S. Lin,
“Classifying web defects with back-propagation neural network by color image processing,” Textile Research Journal, Vol. 70, No. 7, pp. 633-640, 2000.
16. R. Krishnapuram and J. M. Keller, “A possibilistic approach to clustering”, IEEE Transactions on Fuzzy Systems, Vol. 1, No.
2, pp. 98-110, 1993.
17. I. J. Chiang and J. Y. J. Hsu, “Fuzzy classification trees for data analysis”, Fuzzy Sets and Systems, Vol. 130, pp.
87-99, 2002.
18. M. C. Su and C. H. Chou, “A modified version of the k-means algorithm with a distance based on cluster symmetry”, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 23, No. 6, pp. 674-680, 2001.
19. C. Liu, “A Bayesian discriminating features method for face detection”, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 25, No. 6, pp.
725-740, 2003.
20. P. S. Windyga, “Fabric defect classification using wavelet frames and minimum classification error training”, Conference Record-IAS Annual Meeting on IEEE Industry Application Society, Vol.
1, pp. 290-296, 2002.
21. A. L. Amet, A. Ertuzun and A. Ercil, “An efficient method for texture defect detection: sub-band domain co-occurrence matrices”, Image and Vision Computing, Vol. 18, No.1, pp. 543-553, 2000.
22. R. Z. Liu, Y. Q. Shi, W. F. Kosonocky and F. P. Higgins, “Infrared solder joint inspection on surface mount printed circuit boards”, Proceedings of the 38th Midwest Symposium on Circuits and System, Vol. 1, pp. 145-148, 1996.
23. P. Alapurane and T. Westman, “Auto visual inspection of wood surfaces”, 11th IAPR International Conference on Pattern Recognition, Vol. 1, pp. 371-374, 1992.
24. 李得盛,應用統計與類神經網路模式於 監督式分類問題,國立交通大學工業工 程與管理系博士論文,2002。
25. K. Yoon and C. L. Hwang, Multiple attribute decision making: a introduction, Sage Publications Inc., 1995.
26. N. Otsu, “A threshold selection method from gray level histogram”, IEEE Transactions on Systems, Man and Cybernetics, SMC-8, pp. 62-66, 1978.
27. C. L. Hwang and S. J. Chen, Fuzzy multiple attribute decision making - method and applications, A State-of-the-Art Survey, Springer-Verlag, New York, 1992.
28. 葉 怡 成 , “ 類 神 經 網 路 模 式 應 用 與 實 作”,儒林圖書公司,1999。
29. J. C. Bezdek, “Pattern recognition with fuzzy objective function algorithms”, Plenum Press, New York, 1981.
30. 李允中、王小璠與蘇木春編著,模糊理 論及其應用,全華科技,2002。
圖1 偏光膜瑕疵自動檢測系統之機構
2 1 200
1 3 2
2
2 3
圖2 3×3子影像
C1 C2
正常區域 瑕疵區域
圖3 影像正常與瑕疵區域
0 20 40 60 80 100 120 140 160
0 5000 10000 15000 20000 25000 30000 35000
Area
Threshold
Cloud Strip Spot Scratch Pasting wrong
圖4 面積與最佳閥值特徵之分佈
0 1000 2000 3000 4000 5000 6000
0 50 100 150
Average intensity
Entropy
Cloud Strip Spot Scratch Pasting wrong
圖5 平均亮度與熵特徵之分佈