Volume 26, No.2, 2021, pp. 95-115 DOI:10.6574/JPRS.202106_26(2).0003
1 國立成功大學測量及空間資訊學系 碩士 收到日期:民國 110 年 01 月 30 日
2 國立成功大學測量及空間資訊學系 教授 修改日期:民國 110 年 03 月 17 日
* 通訊作者, E-mail: [email protected] 接受日期:民國 110 年 03 月 31 日
地面雷射掃描儀混合模式校正系統及 系統性誤差分析
林烜生
1*曾義星
2摘要
為了更合理地描述地面雷射掃描儀系統性誤差,本研究提出自率定法結合個別組件校正的混合模式 校正理論,共採用 FARO S350、Trimble SX10 與 RIEGL VZ-400 進行測試。根據 t-test (95%信心區間) 結 果,使用系統性誤差改正參數的確能有效描述儀器系統性誤差模式,其中常數項與線性項改正參數已足 以描述本研究三款掃描儀的系統性誤差模式,而帶入個別組件校正得到的參數更能達到約制的效果,呈 現本研究提出之理論具有更謹慎地進行地面雷射掃描儀校正與評估系統性誤差分析的潛力。
關鍵詞:地面雷射掃描儀、地面光達、校正、系統性誤差
1. 前言
近年來,三維雷射掃描技術廣泛地被應用於空 間測繪領域,其突破了傳統測繪技術的限制,對現 今空間資訊領域產生革命性的影響,是一種創新、
強大而有力的量測工具 (吳建廷,2013)。
現今多數地面雷射掃描儀的觀測精度都優於 使用者的需求,然而,實際上儀器的觀測精度仍會 受許多因子影響,例如儀器規格侷限;因年久耗損 致儀器品質不良;量測物體表面材質;溫度、光照 等環境因素影響;人為操作不當等。而前述因子會 透過誤差傳播而影響成果點雲品質。若在儀器出廠 前未經過嚴謹率定、儀器出廠後亦長時間未送回原 廠檢修,儀器受外力碰撞、自然老化等等其他因素,
日積月累造成儀器內部產生問題,將導致掃描結果 含有系統性誤差存在,進而影響儀器之觀測精度。
因此,從事空間測繪領域的專家學者需要一套嚴謹 有效的地面雷射掃描儀校正方法來檢定儀器的系 統性誤差,並能透過分析擬合出最貼近誤差值變化 的數學模型來加以改正,藉此提高儀器觀測精度 (賴志凱,2004、蔡漢龍,2007、Lichti, 2010a)。
到目前為止,所謂「校正」一直與儀器誤差的 確定有關,即由於機械缺陷或設計不良而導致實際 儀器與理想儀器之間的差異 (Schulz, 2008)。由於地 面雷射掃描儀硬體較為精密複雜,即便使用者發現 儀器存在系統性誤差,非專業人士亦無法自行拆解、
調校儀器。本研究旨在探討如何在不拆解儀器的情 形下對地面雷射掃描儀進行校正,期望能了解儀器 誤差模式及減輕其對掃描結果的影響。
多年來,Lichti 和其他先進發表了許多有關地 面雷射掃描儀使用自率定法進行校正的一系列論 文,討論了地面雷射掃描儀可能的誤差來源和相關 改正參數 (Lichti & Licht, 2006、Bae & Lichti, 2007、
Lichti, 2007、Lichti, 2010a、Lichti, 2010b、Chow et al., 2010、Lichti et al., 2011、Chow et al., 2013、Lerma
& García-San-Miguel, 2014、Ge, 2016),自率定法是 以室內布設平面式校正標達到雷射掃描儀自我校 正的方式,以改正參數適當地建立儀器的系統性誤 差模型,藉此改善儀器的觀測成果精度。國內亦有 許多先進針對地面雷射掃描儀校正方法、校正場地 與反射標設計進行探討,提出適合的校正方法來對 掃描誤差與精度進行評估,建立完整之儀器誤差分
析建模、精度量測及系統誤差來源分析 (賴志凱,
2004、蔡漢龍,2007、曾義星等,2008、吳建廷,
2013)。
經 Lichti & Licht (2006)、Lichti (2007) 驗證,
自率定法已被確定能有效模擬儀器的系統性誤差,
由於前述文獻大部分校正場地設置於室內環境,測 距距離較短,故無法評估地面雷射掃描儀於測距上 的長距離 (>30 m) 或長週期性誤差變化。
因此本研究以自率定法為基準,提出了自率定 法結合個別組件校正的混合模式校正理論,並提出 了結合室外標準基線場和室內校正場的混合模式 校正方法進行驗證。
本研究利用室外標準基線場進行測距校正,分 析儀器於 266 m 內的測距誤差是否具有系統性變化,
計算其常數項和線性項系統性誤差改正參數並將 其加入自率定法計算作為約制,避免平差計算過度 修正,藉此增加自率定法使用之系統性誤差數學模 型的合理性與準確性。
2. 地面雷射掃描儀幾何
地面雷射掃描儀 (Terrestrial Laser Scanner, TLS) 具有快速獲取高密度、高精度的物體表面點雲資料 的能力 (吳建廷,2013)。地面雷射掃描儀又可依有 效距離、掃描方式及觀測精度等不同特性來分類 (蔡漢龍,2007)。
地面雷射掃描儀主要由雷射測距儀、反射稜鏡、
伺服馬達與電腦構成,其運作原理是以雷射測距儀 發射雷射光,應用接收雷射反射訊號的時間差計算 距離;以伺服馬達驅動掃描儀作水平與垂直方向旋 轉並紀錄角度;以電腦或儀器介面設定掃描範圍及 掃描參數;以電腦紀錄每發雷射之觀測量,其基本 觀測量是距離、兩個正交的角度及記錄回訊之強度 值,並藉此計算得到各點雲的三維空間坐標,如圖 1 所示。
由於設計上的差異,造成不同廠牌儀器可能具 有不同的掃描角定義,通常可依兩個測角 (水平方 向、垂直方向) 掃描順序區分為橫掃式、縱掃式兩 種。
因雷射掃描儀設計規格與製造技術日益成熟,
目前常見的地面雷射掃描儀多以縱掃式為主,此類 儀器內部僅有以伺服馬達驅動的垂直方向反射稜 鏡,而儀器本身可做全角度的水平方向旋轉,因此 通 常 縱 掃 式 地 面 雷 射 掃 描 儀 的 水 平 視 角 範 圍 (HFOV) 通常可達 360°,垂直視角範圍 (VFOV) 則 通常可達 80°以上,如圖 2 所示。
圖 1 地面雷射掃描儀定位
圖 2 RIEGL VZ-400 掃描儀 (縱掃式) 縱掃式地面雷射掃描儀觀測紀錄如圖 3,其中 γ 與 δ 為水平角度與垂直角度,S 為斜距,掃描點 P 的三維坐標 ( , , ) 可以式(1) 表示。
圖 3 縱掃式地面雷射掃描儀觀測紀錄
"= S × cos( )
=
"× sin( )
"× cos( ) S × sin( )
... (1)
=
S × cos( ) × sin( ) S × cos( ) × cos( )
S × sin( )
從圖 3、式(1)可發現,針對同一掃描點 P,不 同的掃描角定義將會導致坐標值需要使用特定公 式計算,雖然可以利用幾何原理推導橫掃式與縱掃 式儀器之間的轉換公式,但此種儀器在掃描方式上 的根本差異,也許可能會反映在儀器的誤差模式上。
(蔡漢龍,2007)
利用前述掃描原理及掃描方式可以得到在儀 器坐標系中地面雷射掃描儀中心至掃描點雲的三 維坐標差、回訊之強度值及色彩資訊。
該坐標系統是以掃描儀的雷射發射中心為原 點 S,Y 方向指向掃描儀正面方向與水平面交點,
Z 方向與儀器垂直軸平行指向天頂,X 方向垂直於 YSZ 平面構成右手定則坐標系統,為一局部坐標系 統,如圖 4 所示。
圖 4 地面雷射掃描儀儀器坐標系統示意圖 縱掃式地面雷射掃描儀坐標系與物空間坐標 系之關係可表示如圖 5,其中 S 為掃描儀的雷射發 射中心,P 點為待測點的位置,O 點為物空間坐標 系的原點。ρ 為 S 到 P 的距離,α 為儀器坐標系中 S 與 P 點之間的垂直角,θ 為其水平角,( , , )為 儀器坐標系與物空間坐標系的旋轉角度參數。由物 空間坐標系轉換到儀器坐標系的數學式可寫為如 式(2)。
圖 5 縱掃式掃描儀坐標系與物空間坐標系關係圖
=
− ... (2)
其中, , , 為待測點在儀器坐標系位置;
( , , ) 為 待 測 點 在 物 空 間 坐 標 系 位 置 ; , , 為掃描儀雷射發射中心在物空間坐標
系位置; 、 、 為分別繞物空間坐
標系的 X、Y、Z 軸旋轉 , , 角度之旋轉矩陣。
又一般地面雷射掃描儀量測值可理解為測距 觀測量 ( ) 與角度觀測量 ( 、 ) 的組成,故 針對縱掃式雷射掃描儀可將式(2)改寫為下式(3)~式 (5),形成地面雷射掃描儀觀測方程式。
= + + ... (3)
= tan ... (4)
= tan ... (5)
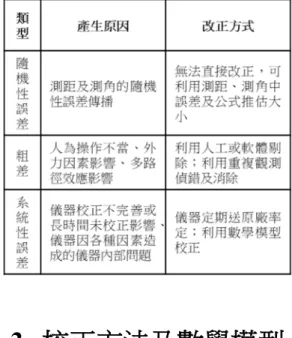
在地面雷射掃描儀龐大的成果點雲中可能含 有許多不同種類誤差,此處以傳統測量對觀測誤差 的基本觀念將其分為三類:隨機性誤差、粗差、系 統性誤差,如表 1。
表 1 地面雷射掃描儀的誤差分類與誤差來源
3. 校正方法及數學模型
3.1 校正方法
本研究提出了自率定法結合個別組件校正的 混合模式校正理論,並提出了結合室外標準基線場 和室內校正場的混合模式校正方法進行驗證。
校正方法可分為兩部分,首先是自率定法,該 方法假設測距與兩個測角間誤差獨立不相關,所以 分別給予其獨立的系統性誤差改正參數組合來描 述地面雷射掃描儀的系統性誤差模式。其次是測距 校正,用於評估地面雷射掃描儀於測距上的長距離 (>30 m) 或長週期性誤差變化,此處利用室外標準 基線場 (長 266 m) 進行,分析地面雷射掃描儀於 266 m 內測距誤差的系統性變化,並計算其常數項 和線性項改正參數,於評估其有效性後將其加入自 率定法計算作為約制,避免平差計算過度修正,藉 此增加自率定法使用之系統性誤差數學模型的合 理性與準確性。
3.1.1 測距校正
以特定設備、方法對儀器內部組件 (例如測距 儀和旋轉組件) 獨立進行校正,可稱為個別系統組 件校正。本研究基於 ISO 17123-4:2012 (ISO, 2012),
參考電子測距儀 (EDM) 的校正方法,提出了以室 外標準基線場對地面雷射掃描儀進行測距校正的 方法。
標準基線場建置的目的即在於提供標準基線,
以評估待校正儀器是否有常數項誤差及線性項誤 差,藉此驗證測距儀器的品質,而我國各基線場之 管理及維護係依內政部國土測繪中心「內政部國土 測繪中心電子測距基線場管理要點」規定辦理。(邱 明全等,2007)
3.1.2 自率定法
自率定法 (Self-calibration) 是一種有效且被廣 泛使用的地面雷射掃描儀校正方法(Lichti & Licht, 2006、Bae & Lichti, 2007、Lichti, 2007、Lichti, 2010a、
Lichti, 2010b、Chow et al., 2010、Lichti et al., 2011、
Chow et al., 2013、Lerma & García-San-Miguel, 2014),
該方法的前提是將地面雷射掃描儀系統的所有組 件作為一整體考慮,針對個別組件誤差 (例如,測 距儀、水平度盤) 與由於組件間軸向未對準而導致 的誤差 (例如,垂直指標差、橫軸誤差) 利用改正參 數建立適當的數學模型來模擬系統性誤差。
自率定法無需借助特殊設備即可執行,僅需要 一個結構穩固的房間,但是,房間內測站與校正標 的網型分布必須仔細設計,以確保網型具有強大的 幾何特性,從而最大程度地提高計算出的系統性誤 差改正參數準確性,有關更多網型設計的詳細信息,
請參考 Lichti (2007,2010b),而自率定法亦需要大 量的多餘觀測量,其能有效協助自率定法識別殘差 中含有的系統性誤差趨勢並採用正確的數學模型 模擬。
3.1.3 混合模式
如前述,自率定法能有效模擬該儀器的系統性 誤差,但僅以自率定法獲得的系統性誤差改正參數 並無法驗證其合理性與代表意義,且多數儀器的掃 描有效距離遠大於室內空間,利用小於 30 m 的室 內空間來評估其系統性誤差似乎略嫌不足,故本研 究結合自率定法與測距校正,將地面雷射掃描儀測 距組件利用室外標準基線場 (長 266 m) 獨立進行 測距校正,計算其加常數 C 和乘常數 S 作為自率定 法中測距部分的系統性誤差改正參數。
本研究提出之混合模式方法,意即在直接考量 整體的自率定法中合理加入利用個別部件校正方
法測定的改正參數作為約制,避免平差計算過度修 正,藉此增加自率定法使用之系統性誤差數學模型 的合理性與準確性。
3.2 數學模型
3.2.1 測距校正數學模型
參照 ISO 17123-4:2012 (ISO, 2012)電子測距儀 校正方式,以地面雷射掃描儀掃描立於基樁上的校 正標並計算求得水平距離 (地面雷射掃描儀量測距 離 ),再利用比較法的方式(圖 6),透過地面雷射 掃描儀量測距離 ( ) 與室外標準基線場標準距 離 ( ) 計算儀器誤差 (器差∆ )(式(6)),再以器差 (∆ ) 為縱軸,基線場標準距離 ( ) 為橫軸,並使 用一元線性回歸方程式(式(7)) 計算儀器的常數項 (加常數 C) 和線性項 (乘常數 S) 系統性誤差改正 參數(式(8) ~式(9)),利用 t-test 確定加常數 C 和乘 常數 S 在 95%信心區間內是否有效。
圖 6 測距校正比較法示意圖
∆ = − ... (6) y = mx + b ... (7)
=∑ ×∑( ∆ ) ∑ ×∑( × ∆ )
×∑ (∑ ) ... (8)
= ×∑( × ∆ ) ∑( )×∑( ∆ )
×∑ (∑ ) ... (9) 加常數 C 和乘常數 S 代表該地面雷射掃描儀於 測距方面的常數項與線性項系統性誤差,亦可利用 式(10)及式(11)計算地面雷射掃描儀量測距離校正 值 ( ) 及校正後的剩餘誤差 ( ) 。
= + ( × ) + ... (10)
= − ... (11)
本研究以此方法評估該地面雷射掃描儀之測 距誤差,並將得到之加常數 C 和乘常數 S 帶入自率 定法計算,比較計算成果之差異。
3.2.2 自率定法數學模型
本研究參考 Lichti 和其他先進文獻建置室內校 正場以評估地面雷射掃描儀器差以及測距、角度方 面的改正參數。先於室內校正場布設反射校正標,
再利用標準件 (全測站) 量測校正標在物空間坐標 系位置真值( , , ),以Ref 表示。再以待校件 (地面雷射掃描儀) 掃描校正標計算得到校正標在 物空間坐標系位置量測值( , , ),以Mea 表示。
經由比對同一校正標兩者差值計算器差(Diff ),詳 如式(12)。
Diff = Mea − Ref ... (12) 將前述地面雷射掃描儀觀測方程式 (式(3) ~式 (5)) ,加入系統誤差改正參數 (∆ 、∆ 、∆ ) 來 描述地面雷射掃描儀的系統性誤差數學模型,形成 自率定法觀測方程式 (式(13) ~式(15)) 。
+ = + + − ∆ ... (13)
+ = tan − ∆ ... (14)
+ = tan − ∆ ... (15)
由於部分的系統性誤差數學模型無法以單一 參數描述,故需要以較複雜的改正參數組合來處理,
例如以常數項加上線性項改正參數的系統性誤差 改正模型如下式(16) ~式(18):
∆ = + × ... (16)
∆ = + × ... (17)
∆ = + × ... (18)
而參數的選擇有無限多種可能,改正參數組合 的合理性需經過統計檢定進行顯著性測試來決定,
亦即先不要加入系統性誤差改正參數進行計算,分 析觀測量之殘差分布統計性質,再與加入改正參數 組合的計算成果比較,藉此評估校正成效。
3.2.3 混合模式數學模型
混合模式結合自率定法與測距校正,於自率定 法中引入以較嚴謹的測距校正計算得到之加常數 C 和乘常數 S 作為自率定法中測距部分的系統性誤差 改正參數,意即將式(16)修改為式(19),其導致系統 性誤差改正參數解算結果產生明顯不同,藉此讓自 率定法的校正成果能更合理且正確。
∆ = C + × ... (19)
4. 校正程序與場地設置
4.1 校正程序
測距校正在室外標準基線場執行,校正方法如 電子測距儀的校正方法,先將儀器利用求心基座定 心定平後,依序設置在 0 m、5 m 基樁,分別觀測設 置在 5 m、23 m、31 m、59 m、77 m、95 m、143 m、
266 m 基樁上之校正標,每段基線觀測 1 次,共 15 測站,經軟體計算求得水平距離,與室外標準基線 場標準距離相比對,得到每段距離的器差,並進行 校正計算及統計分析,求得儀器的常數項誤差、線 性項誤差。
自率定法在室內校正場執行,將儀器依序架設 於室內校正場內金屬樁 (S1~S4) 上,利用求心基 座定心定平後,分別面向東、南、西、北方進行全 景掃描作業,完成 S1 金屬樁掃描作業後,再依序進 行 S2、S3 及 S4 樁位掃描,每樁位觀測 4 次,共 16 測站,經軟體計算求得校正標坐標量測值,再與校 正標坐標真值相比對,計算得到器差,並進行校正 計算及統計分析,求得儀器的系統性誤差數學模型 以及改正參數。
因此,完整校正流程依序為:室外標準基線場 標準值量測→室外標準基線場地面雷射掃描儀量 測→室內校正場標準值量測→室內校正場地面雷
射掃描儀量測→校正程式計算,如圖 7 所示。
圖 7 校正程序示意圖
4.2 校正標設計
4.2.1 室外標準基線場校正標
經查市售已有適用於本研究標準基線場距離,
且可固定於基樁上的地面雷射掃描儀專用校正標,
考量研究成本與適用性,決定將該專用校正標結合 求心基座作為本研究室外標準基線場校正標使用,
該設計能針對不同需求,利用金屬桿將校正標延長 升高,避免人車經過時產生遮蔽,藉此讓校正場作 業更有彈性(圖 8)。
圖 8 室外標準基線場校正標
4.2.2 室內校正場校正標
本研究利用金屬架將校正標與牆面間隔一段 距離並沿著整個室內校正場牆面架設,使反射標與 背景牆面位於不同平面以利後續自動標心偵測。
校正標與固定座之製作規格設計如圖 9。目前 製作之校正標直徑為 10 cm,經實際測試,在合理 掃描密度 (點雲間距) 下,本研究撰寫之程式已可
於 30 m 內正確辨識該校正標中心,因此該校正標 作為本研究室內校正場 (最長距離小於 10 m) 的校 正標使用已十分足夠。
圖 9 室內校正場校正標
4.3 校正場設置與量測 4.3.1 室外標準基線場
本研究選定國土測繪中心辦公大樓前安全島 黎明基線場 (現為電子測距儀校正場) 作為室外標 準基線場 (圖 10)。黎明基線場於地表穩定平坦、通 視、日照植被均勻及地質狀況良好之地點設置有 9 支穩固之鋼筋混凝土基樁,各基樁在一直線上作適 當之分布且基樁上設有可直接架設儀器之強制定 心基座。
圖 10 黎明基線場
該基線場之管理及維護係依內政部國土測繪 中心「內政部國土測繪中心電子測距基線場管理要 點」規定辦理,每年使用經國家度量衡標準實驗室 校正合格之電子測距經緯儀檢測,並利用整體嚴密 平差方程式,採用間接平差法進行最小二乘平差計 算標準距離,詳細過程可參閱邱明全等(2007)。
室外標準基線場共設置 0 m、5 m、23 m、31 m、59 m、77 m、95 m、143 m 及 266 m 等 9 支樁,
掃描儀首先置於 0 m 站並定心定平,分別於 5 m 至 266 m 等 8 站架設校正標並觀測;然後將儀器移設 於 5m 站並定心定平,再向 23 m 至 266 m 等 7 站架 設校正標並觀測,共有 15 測站,如圖 11 所示。
由於儀器掃描參數的名稱會隨各廠牌有各自 不同的定義,建議以校正標面點雲間距小於 2 cm 為 基準,針對校正標範圍進行加密掃描,避免遮蔽或 缺漏情形。
圖 11 室外標準基線場掃描作業示意圖
4.3.2 室內校正場
自率定法無需借助特殊設備即可執行,僅需要 一個具有適當大小的房間,本研究選定國土測繪中 心黎明辦公區莊敬樓 1 樓辦公室作為室內校正場,
量測員需要在室內校正場中從數個不同的測站位 置和起始方向獲取校正標的重複觀測點雲資料。
於室內校正場設置 S1、S2、S3 及 S4 等 4 支金 屬樁,且金屬樁上設有強制定心基座,並布設 20 個 鋁擠型柱,柱上固定 4 個校正標,共有 80 個校正 標,鋁擠型柱放置位置標示為 T01 到 T20,如圖 12 所示。
本研究以 Leica 全站儀 (Leica TS09 PLUS 1”) 作為標準件來量測室內校正場校正標標準值,全站 儀量測作業以無稜鏡模式正倒鏡觀測取平均值。首 先將全站儀架設於金屬樁 S1 位置,並於金屬樁 S4 架設反射稜鏡作為後視使用,兩者皆利用求心基座 定心定平,藉此建立室內校正場的區域坐標系統。
從 T01 鋁擠型柱開始依序量測至 T20 鋁擠型柱,每 支鋁擠型柱皆由下而上量測校正標 (T011~T014),
完成金屬樁 S1 掃描作業後,再重複此順序,依序進 行金屬樁 S2、S3 及 S4,量測全部的校正標與金屬 樁坐標。標準值計算採用最小約制自由網平差,以 金屬樁 S1 作為約制,將此 4 站 (金屬樁 S1~S4) 的 角度與距離觀測量進行整體平差,計算各校正標之 三維坐標。
圖 12 室內校正場校正標分布示意圖 為了進行重複觀測的精度評估,分析單站觀測 彼此間的再現性量測精度,可以將 4 站全數觀測整 體平差的坐標成果與 4 次單站測量成果相比對,可 計算 320 組(Y, X, Z)的較差量,由較差量進行統計 分析,統計量如表 2 所示。其中,較差量的標準差 數值,其統計意義是校正標重複 4 次測量的再現性 量測精度,平面為 0.6 mm,高程為 0.2 mm。
表 2 標準值重複觀測精度評估
本研究以地面雷射掃描儀掃描設置於室內校 正場的校正標並計算求得三維坐標,再利用比較法 的方式,將求得的校正標坐標量測值與室內校正場 校正標坐標標準值進行比較分析,透過自率定法識 別殘差中所有的系統性誤差並採用正確的系統性
誤差改正參數組成誤差模型來模擬系統性誤差。
將地面雷射掃描儀依序架設於室內校正場內 金屬樁 (S1~S4) 上,利用求心基座定心定平後,
進行全角度全區域掃描 (Full_Angle 全景掃描) 作 業,完成架設 S1 金屬樁掃描作業後,依序進行 S2、
S3 及 S4,重複作業,並計算成果。
由於儀器參數的名稱會隨各廠牌有各自不同 的定義,建議以校正標面點雲間距小於 0.5 cm 為基 準,避免遮蔽或缺漏情形。
4.4 系統性誤差數學模型測試組合
如前章所述,參數的選擇有無限多種可能,即 使是同一型號的掃描儀也有可能因為使用年限跟 保存狀況不同,而各自有不同的系統性誤差改正參 數。
本研究提出下列 7 種不同的改正參數組合,並 採用 3 種不同廠牌之地面雷射掃描儀進行實地量測 作業,利用 t-test 進行顯著性測試來決定改正參數 組合的合理性,期望藉此找到普遍性通用的系統性 誤差改正參數組合,達到作為地面雷射掃描儀校正 通解 (general solution) 的目標。
4.4.1 無附加參數
第一個測試組合為「無附加參數」,觀測方程式 如式(3) ~式(5),此組合主要是作為選擇改正參數的 先驗資訊,以及作為衡量不同參數組合的基準,藉 由比較改正參數加入前後誤差模式的變化,評估該 系統性誤差數學模型是否有效以及其改善率。
亦即先不要加入系統性誤差改正參數進行平 差,平差後分析三個原始觀測量之殘差分布趨勢,
再與其他系統性誤差數學模型測試組合計算成果 比較,分析殘差的系統性變化是否因此消除或減小。
4.4.2 簡易參數自率定模式
第二個測試組合為「簡易參數自率定模式」,由 於現今地面雷射掃描儀設計與製造技術日益成熟,
掃描儀因設計缺陷或製造不良造成的系統性誤差 應相對減少,此組合假設掃描儀於測距與測角 (水 平、垂直方向) 僅含有常數項誤差與線性項誤差,
其餘相對微小之系統性誤差忽略不計,其數學模式 為式(16) ~式(18)。
4.4.3 簡易參數混合模式
第三個測試組合為「簡易參數混合模式」,為本 研究提出之混合模式方法,意即簡易參數自率定模 式之變形,將地面雷射掃描儀測距組件利用室外標 準基線場 (長 266 m) 獨立進行測距校正,計算其加 常數 C 和乘常數 S 作為自率定法中測距部分的系統 性誤差改正參數 (式(19)),其餘同「簡易參數自率 定模式」。
4.4.4 物理參數自率定模式
第四個測試組合為「物理參數自率定模式」,該 系統性誤差數學模型係由 Lichti (2007)與 Ge (2016) 提出,該測試組合中使用的系統性誤差改正參數皆 具有明確的物理解釋 (表 3) ,根據文獻測試結果,
使用該模型已足以消除大部分的系統性誤差,且能 減少解算需要之觀測量及避免複雜改正參數組合 造成過度模擬的效果。其水平角改正參數修改為式 (20),其餘同「簡易參數自率定模式」。
∆ = + ... (20)
表 3 基礎物理改正參數
參數 代表意義
雷射測距儀固有的常數項誤差項。
雷射測距儀固有的線性項誤差項。
水平角量測系統隨垂直角呈正割變化的 週期性 (360°) 誤差項,該誤差假定是由 視準軸誤差引起。
水平角量測系統隨垂直角呈正切變化的 週期性 (360°) 誤差項,該誤差假定是由 橫軸誤差引起。
垂直角量測系統固有的常數項誤差項 (垂直指標差) 。
垂直角量測系統固有的線性項誤差項。
4.4.5 物理參數混合模式
第五個測試組合為「物理參數混合模式」,為本 研究提出之混合模式方法,意即物理參數自率定模 式之變形,與簡易參數混合模式相同,將測距校正 得到之加常數 C 和乘常數 S 作為自率定法中測距部 分的系統性誤差改正參數 (式(19)) ,其餘同「物理 參數自率定模式」。
4.4.6 Lichti 自率定模式
第六個測試組合為「Lichti 自率定模式」,據其 研究文獻(Lichti, 2007、Ge, 2016)指出,此數學模型 (式(21)~式(23)) 應可以適用於大部分地面雷射掃 描儀,本研究將 Lichti 組合作為最嚴謹考量的標準,
比較其與其他組合校正效果之差異,藉此評估作為 通解是否仍需要使用如此多的改正參數。
∆ = + ∗ + +
4 + 4
+
+ + ... (21)
4 + 4
∆ = + + 2
+ 2 + + 3 .... (22)
+ 4
∆ = + + +
3 + 3 ... (23)
4.4.7 Lichti 混合模式
第七個測試組合為「Lichti 混合模式」,為本研 究提出之混合模式方法,以測距校正得到之加常數 C 和乘常數 S 取代 Lichti 自率定模式的測距部分中 的 和 (式(21)) ,其餘同 Lichti 自率定模式。
5. 實驗成果與分析
本研究選用 FARO S350、Trimble SX10、RIEGL VZ-400 縱掃式地面雷射掃描儀進行測試,規格如表 4 所示。
表 4 測試之地面雷射掃描儀規格
5.1 系統性誤差數學模型測試組合
5.1.1 掃描成果
室外標準基線場觀測得到之點雲成果如表 5 所示。可以發現儘管以相同操作步驟進行量測,但 由於儀器品質與設計規格不同,各儀器的點雲成果 在反射強度、點雲密度與點雲品質上仍有差異,約 在 59 m 後可以明顯看出三款儀器在雜訊、變形、反 射強度與點雲密度上的不同。
表 5 部分室外標準基線場點雲成果 測站 FARO
S350
Trimble SX10
RIEGL VZ-400
0m_5m
0m_23m
0m_31m
0m_59m
0m_77m
0m_95m
0m_143m
0m_266m
為減少人工於點雲資料中判讀校正標中心造 成之差異,本研究參考了國外文獻(Ge & Wunderlich,
2015),採用自動化辨識校正標中心位置的設計,流 程分為四個步驟,分別是:辨識校正標標面、萃取 標面黑白交界處的點位、擬合線段計算標面中心點 位置、RANSAC 解算,將辨識得到的校正標中心坐 標量測值作為後續平差計算的觀測量使用。
5.1.2 測距校正計算成果
計算成果如表 6 所示,其中 為計算得到的地 面雷射掃描儀觀測距離,若為 NULL 值則代表該標 面點雲無法辨識或品質不佳遭人工剔除; 為基線 標準距離; 為利用式(10)計算之觀測距離校正值;
加常數 C 和乘常數 S 則為利用式(7)、(8)計算得到 的常數項和線性項系統性誤差改正參數。
比較校正前後數值與標準值之差異與其標準 偏差評估其有效性 (表 7) ,其顯示使用本研究提出 之測距校正能有效改善觀測距離精度,將加常數 C 和乘常數 S 視為真值帶入混合模式計算進行其他參 數的校正。
5.2 系統性誤差數學模型測試組合
5.2.1 掃描成果
如 5.1.1 所述,為減少人工誤判機率,本研究以 程式於點雲中自動辨識校正標中心位置並對應其 標號,惟點雲品質不良或點雲不完整時 (圖 13、圖 14),自動化辨識仍有可能會失敗,此時須由人工介 入調整自動辨識成果或剔除錯誤辨識成果 (圖 15),
以確保觀測量品質。惟三款儀器之室內校正場點雲 極為相似,故僅展示部分點雲成果作為代表,如圖 16~圖 18。
5.2.2 混合模式校正計算成果
校正標中心偵測完成後,即進行三款地面雷射 掃描儀的混合模式校正計算與系統性誤差數學模 型組合測試,除了透過平差計算標準偏差 (Standard Deviation, STD) 來評估內部精度外,另外也透過與 校正標坐標標準值比較,計算均方根誤差 (Root- Mean-Square Error, RMSE) 藉此評估外部精度,所 使用的系統性誤差改正參數也在計算過程中一併 求解,成果如表 8、表 9、表 10。
如 4.4 所述,本研究提出 7 種不同的改正參數
組合,並以「無附加參數」作為衡量不同參數組合 的基準,藉由比較改正參數加入前後 STD 與 RMSE 的變化,以及 t-test 顯著性測試的成果,評估該系統 性誤差數學模型組合是否有效以及其改善率。
圖 13 標面點雲品質不良
圖 14 標面點雲不完整
圖 15 錯誤偵測成果
圖 16 FARO S350 點雲成果
圖 17 Trimble SX10 點雲成果
圖 18 RIEGL VZ-400 點雲成果
表 6 測距校正計算
測站 FARO S350 Trimble SX10 RIEGL VZ-400 標準距離 (m) (m) (m) (m) (m) (m) (m)
0m_5m 5.0003 4.9980 5.0012 4.9984 5.0003 4.9993 4.9980 0m_23m 23.0269 23.0271 23.0331 23.0306 23.0355 23.0345 23.0285 0m_31m 30.9891 30.9904 30.9940 30.9917 30.9898 30.9888 30.9890 0m_59m 59.0176 59.0227 59.0188 59.0169 59.0126 59.0115 59.0147 0m_77m NULL NULL 77.0188 77.0171 77.0207 77.0196 77.0187 0m_95m 95.0104 95.0204 NULL NULL 95.0163 95.0151 95.0187 0m_143m NULL NULL NULL NULL 142.9941 142.9929 142.9872 0m_266m NULL NULL NULL NULL NULL NULL 265.9997 5m_23m 18.0286 18.0281 18.0314 18.0288 18.0272 18.0262 18.0304 5m_31m 25.9904 25.9909 25.9921 25.9897 25.9943 25.9933 25.9900 5m_59m 54.0090 54.0134 54.0162 54.0142 54.0181 54.0170 54.0166 5m_77m NULL NULL 72.0208 72.0191 72.0180 72.0169 72.0204 5m_95m 90.0061 90.0154 90.0210 90.0195 90.0186 90.0175 90.0205 5m_143m NULL NULL 137.9898 137.9891 NULL NULL 137.9891 5m_266m NULL NULL 261.0011 261.0023 NULL NULL 261.0015
觀測量 9 12 12
S(ppm) 137 15 -2
C(m) -0.0030 -0.0028 -0.0009
表 7 測距校正成果數據分析 FARO
S350
Trimble SX10
RIEGL VZ-400
−
平均值(mm) -3.1 1.7 1.1
−
標準偏差(mm) 4.5 1.8 3.1
−
平均值(mm) 0.0 0.0 0.0
−
標準偏差(mm) 2.7 1.4 3.1 有關 FARO S350 計算成果,觀察表 8 中「無附 加參數」部分可呈現儀器原始的量測品質,其在測 距方面的 STD 約 0.5 mm,符合其規格之測距準確 度 , 惟 角 度 方 面 的 STD 較 大 , 水 平角 方 面 約 0.000430 rad (約 0.025°),垂直角方面約 0.000405 rad (約 0.023°),遠大於其規格之測角精度,初步判斷原 因可能是室內空間太小,測距偏短導致測角誤差較 為明顯,進一步將測距、水平角與垂直角的改正量 繪製成圖 19,可發現除了偶有粗差外,整體改正量 變化趨勢為趨近於 0 的平坦直線,呈現了儀器內部 的穩定度。
本研究亦利用外部檢核方法評估 FARO S350 之掃描精度,意即比較平差計算得到的校正標量測 值與校正標標準值差異 (器差),可將比較結果繪製 成圖 20,可發現整體器差趨勢以線性項變化為主,
且器差值於 XYZ 軸向均分布於 2 mm,符合其規格 精度,而其 RMSE 值於 XYZ 軸向均小於 1 mm,亦 符合其規格精度。
針對表 8 中自率定模式部分,與「無附加參數」
比較,使用自率定模式的測試組合,的確對計算成 果的 STD 與 RMSE 有正面影響,意即加入的系統 性誤差改正參數確實能有效吸收觀測量中含有的 誤差。使用的改正參數隨著「簡易參數自率定模式」、
「物理參數自率定模式」與「Lichti 自率定模式」越 來越複雜,而計算成果的 STD 與 RMSE 也越來越 好,因此初步判斷參數數量與改善程度有直接關係,
但其改善的幅度極小,經有效位數取位後已無法顯 示。
圖 19 FARO S350 無附加參數改正量
圖 20 FARO S350 無附加參數各軸向器差
為了量化不同自率定模式測試組合顯著的程 度,對距離、水平角及垂直角改正量利用 t-test 進行 統計檢定,結果如表 8。與「無附加參數」比較,除 水平角方面外,在 95%信心區間下「簡易參數自率 定模式」、「物理參數自率定模式」與「Lichti 自率定 模式」皆為顯著,而若以「簡易參數自率定模式」
為基準,則「物理參數自率定模式」與「Lichti 自率 定模式」皆不顯著,該模式中僅使用常數項與線性 項系統性誤差改正參數,因此可推論 FARO S350 的 系統性誤差模式中以常數項與線性項為主。
針對表 8 中混合模式部分,與「無附加參數」
比較,除水平角方面外,在 95%信心區間下「簡易 參數混合模式」、「物理參數混合模式」與「Lichti 混 合模式」皆為顯著,而若以「簡易參數自率定模式」
為基準,在 95%信心區間下「簡易參數混合模式」、
「物理參數混合模式」與「Lichti 混合模式」在距離 方面亦仍為顯著,由於自率定模式與混合模式之差 異在於是否使用測距校正得到加常數與乘常數作 為改正參數,因此可推論 FARO S350 使用自率定模 式得到之常數項、線性項改正參數與測距校正得到 之加常數與乘常數有明顯不同且其會造成解算成 果有顯著差異。
又從表 8 可發現,儘管對應的自率定模式、混 合模式測試組合其數學模式類似,但參數解算成果 卻不同,如「簡易參數」中兩者解算的 b0、b1、c0、
c1 皆不相同,初步推論為混合模式中帶入測距校正 得到之加常數與乘常數達到約制平差計算的效果,
讓計算成果更合理。
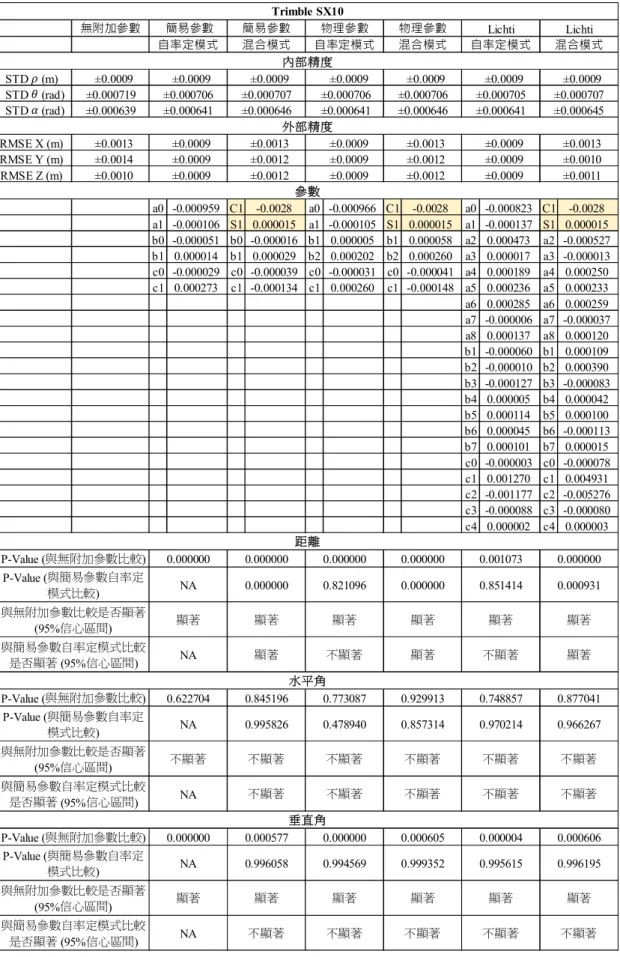
有關 Trimble SX10 計算成果,觀察表 9「無附 加參數」部分,可發現 Trimble SX10 在測距方面的 STD 約 0.9 mm,符合其規格之測距準確度,角度方 面的 STD 亦偏大,水平角方面約 0.000719 rad (約 0.041°),垂直角方面約 0.000639 rad (約 0.037°),遠 大於其規格之測角精度,初步判斷原因同 FARO S350,其改正量趨勢如圖 21 所示,可發現整體改正 量變化趨勢為趨近於 0 的平坦直線,無明顯粗差。
圖 21 Trimble SX10 無附加參數改正量
比較 Trimble SX10 平差計算得到的校正標量測 值與校正標標準值差異 (器差),成果如圖 22 所示,
可發現整體器差趨勢以線性項變化為主附帶輕微 正弦週期變化,且器差值於 XYZ 軸向均分布於 2 mm 內,符合其規格精度,而其 RMSE 值於 XYZ 軸 向約 1 mm 左右,亦符合其規格精度。
針對表 9 中自率定模式部分,與「無附加參數」
比較,與 FARO S350 成果相同,意即呈現加入改正 參數確實能有效吸收誤差的現象。其亦呈現隨著數 學模型越來越複雜,而計算成果的 STD 與 RMSE 也越來越好的現象,但其改善的幅度亦極小。
為了量化不同自率定模式測試組合顯著的程 度,利用 t-test 進行統計檢定,結果如表 9。與 FARO S350 相同,與「無附加參數」比較,除水平角方面 外,在 95%信心區間下,三個自率定模式測試組合 皆為顯著,而若以「簡易參數自率定模式」為基準,
則其餘兩者皆不顯著,意即 Trimble SX10 的系統性 誤差模式中亦以常數項與線性項為主。
表 8 校正計算及統計檢定成果 (FARO S350)
無附加參數
STD (m) ±0.0005 STD (rad) ±0.000430 STD (rad) ±0.000405
RMSE X (m) ±0.0007 RMSE Y (m) ±0.0007 RMSE Z (m) ±0.0006
a0 -0.000465 C1 -0.0030 a0 -0.000479 C1 -0.0030 a0 -0.000430 C1 -0.0030 a1 -0.000044 S1 0.000137 a1 -0.000041 S1 0.000137 a1 -0.000049 S1 0.000137 b0 0.000032 b0 0.000050 b1 0.000074 b1 0.000112 a2 -0.000367 a2 -0.001439 b1 -0.000007 b1 0.000125 b2 0.000077 b2 0.000058 a3 -0.000084 a3 -0.000108 c0 0.000049 c0 0.000013 c0 0.000049 c0 -0.000001 a4 0.000027 a4 0.000046 c1 -0.000244 c1 -0.001066 c1 -0.000239 c1 -0.001252 a5 0.000008 a5 0.000090 a6 0.000110 a6 0.000070 a7 0.000061 a7 0.000048 a8 0.000019 a8 -0.000096 b1 0.000035 b1 0.000019 b2 0.000049 b2 -0.000077 b3 0.000038 b3 0.000107 b4 0.000023 b4 0.000018 b5 -0.000019 b5 0.000064 b6 0.000019 b6 0.000063 b7 0.000014 b7 0.000046 c0 -0.000046 c0 -0.000196 c1 -0.006005 c1 0.001407 c2 0.006066 c2 -0.002340 c3 -0.000008 c3 -0.000013 c4 -0.000055 c4 -0.000079
0.993295
顯著
NA 不顯著 不顯著 不顯著 不顯著 不顯著
顯著 顯著 顯著 顯著 顯著
NA 0.998151 0.781089 0.997282 0.996390
0.000000 0.039256 0.000000 0.044061 0.000003 0.016504 0.967960
垂直角 水平角
0.406990 0.863466
P-Value (與無附加參數比較)
NA 0.996658 0.074001 0.889893 0.883247
不顯著 顯著 不顯著 顯著
不顯著
NA 不顯著 不顯著 不顯著 不顯著 不顯著
不顯著 不顯著 不顯著 不顯著 不顯著
0.000000
顯著
顯著
0.727063 0.947799
0.000000
顯著 顯著 顯著 顯著
0.722561 0.922056
P-Value (與簡易參數自率定 模式比較) 與無附加參數比較是否顯著
(95%信心區間) 與簡易參數自率定模式比較
是否顯著 (95%信心區間) 與簡易參數自率定模式比較
是否顯著 (95%信心區間)
P-Value (與無附加參數比較) P-Value (與簡易參數自率定
模式比較) 與無附加參數比較是否顯著
(95%信心區間) 與簡易參數自率定模式比較
是否顯著 (95%信心區間)
距離 P-Value (與無附加參數比較)
P-Value (與簡易參數自率定 模式比較) 與無附加參數比較是否顯著
(95%信心區間)
0.000000 0.000000 0.000089 0.000000 0.399665 0.000000 0.649908
0.000000 NA
顯著
NA
0.000000 FARO S350
參數
±0.0011 ±0.0013 Lichti 混合模式
±0.0006
±0.000451
±0.000413
±0.0014 ±0.0005
±0.0006 Lichti 自率定模式
±0.0005
±0.000427
±0.000404
±0.0005
±0.0007
物理參數 混合模式
±0.0006
±0.000462
±0.000417 物理參數
自率定模式
±0.0005
±0.000405
±0.000428
±0.0005 ±0.0007
簡易參數 混合模式
±0.0006
±0.000416
±0.000455
±0.0013 ±0.0011 ±0.0017 簡易參數
自率定模式
±0.0005
±0.000428
±0.000405
±0.0005 ±0.0012
±0.0012 ±0.0018 內部精度
外部精度 ±0.0005 ±0.0005
表 9 校正計算及統計檢定成果 (Trimble SX10)
無附加參數
STD (m) ±0.0009 STD (rad) ±0.000719 STD (rad) ±0.000639
RMSE X (m) ±0.0013 RMSE Y (m) ±0.0014 RMSE Z (m) ±0.0010
a0 -0.000959 C1 -0.0028 a0 -0.000966 C1 -0.0028 a0 -0.000823 C1 -0.0028 a1 -0.000106 S1 0.000015 a1 -0.000105 S1 0.000015 a1 -0.000137 S1 0.000015 b0 -0.000051 b0 -0.000016 b1 0.000005 b1 0.000058 a2 0.000473 a2 -0.000527 b1 0.000014 b1 0.000029 b2 0.000202 b2 0.000260 a3 0.000017 a3 -0.000013 c0 -0.000029 c0 -0.000039 c0 -0.000031 c0 -0.000041 a4 0.000189 a4 0.000250 c1 0.000273 c1 -0.000134 c1 0.000260 c1 -0.000148 a5 0.000236 a5 0.000233 a6 0.000285 a6 0.000259 a7 -0.000006 a7 -0.000037 a8 0.000137 a8 0.000120 b1 -0.000060 b1 0.000109 b2 -0.000010 b2 0.000390 b3 -0.000127 b3 -0.000083 b4 0.000005 b4 0.000042 b5 0.000114 b5 0.000100 b6 0.000045 b6 -0.000113 b7 0.000101 b7 0.000015 c0 -0.000003 c0 -0.000078 c1 0.001270 c1 0.004931 c2 -0.001177 c2 -0.005276 c3 -0.000088 c3 -0.000080 c4 0.000002 c4 0.000003
不顯著 不顯著
與簡易參數自率定模式比較
是否顯著 (95%信心區間) NA 不顯著 不顯著 不顯著
0.995615 0.996195 與無附加參數比較是否顯著
(95%信心區間) 顯著 顯著 顯著 顯著 顯著 顯著
P-Value (與簡易參數自率定
模式比較) NA 0.996058 0.994569 0.999352
與簡易參數自率定模式比較
是否顯著 (95%信心區間) NA 顯著 不顯著 顯著 不顯著 顯著
水平角
與無附加參數比較是否顯著
(95%信心區間) 不顯著 不顯著 不顯著 不顯著 不顯著 不顯著
0.000004 0.000606 P-Value (與無附加參數比較) 0.000000 0.000577 0.000000 0.000605
垂直角
0.970214 0.966267
與簡易參數自率定模式比較
是否顯著 (95%信心區間) NA 不顯著 不顯著 不顯著 不顯著 不顯著
P-Value (與簡易參數自率定
模式比較) NA 0.995826 0.478940 0.857314
0.748857 0.877041 P-Value (與無附加參數比較) 0.622704 0.845196 0.773087 0.929913
顯著 顯著
與無附加參數比較是否顯著
(95%信心區間) 顯著 顯著 顯著 顯著
0.001073 0.000000 P-Value (與簡易參數自率定
模式比較) NA 0.000000 0.821096 0.000000 0.851414 0.000931
距離
P-Value (與無附加參數比較) 0.000000 0.000000 0.000000 0.000000 Trimble SX10
參數
±0.000707 ±0.0009
±0.000645
±0.0013 ±0.0010 ±0.0011 ±0.0009
±0.000705
±0.0009 ±0.0009 ±0.0009 外部精度
±0.0009 ±0.0009
±0.0009 ±0.0013
±0.0012 ±0.0012 ±0.0009
±0.0009
±0.0009
±0.000707
±0.000646
±0.0013 ±0.0012 ±0.0012 ±0.0009
±0.0009
±0.000706
±0.000641
混合模式
±0.0009 ±0.000706 ±0.000641
±0.0009
±0.000706
±0.000646 內部精度
±0.000641
Lichti Lichti
自率定模式 混合模式 自率定模式 混合模式 自率定模式
簡易參數 簡易參數 物理參數 物理參數
針對表 9 中混合模式部分,與 FARO S350 相 同,可發現與「無附加參數」比較,除水平角方面 外,三個混合模式皆為顯著,而若以「簡易參數自 率定模式」為基準,三個混合模式在距離方面亦仍 為顯著,因此可推論 Trimble SX10 使用自率定模式 得到之常數項、線性項改正參數與測距校正得到之 加常數與乘常數有明顯不同且其會造成解算成果 有顯著差異。
又從表 9 可以發現,數學模式類似的自率定模 式、混合模式測試組合,其參數解算成果並不相同,
與 FARO S350 相同,初步推論為混合模式中帶入加 常數與乘常數能達到約制平差計算的效果。
圖 22 Trimble SX10 無附加參數各軸向器差
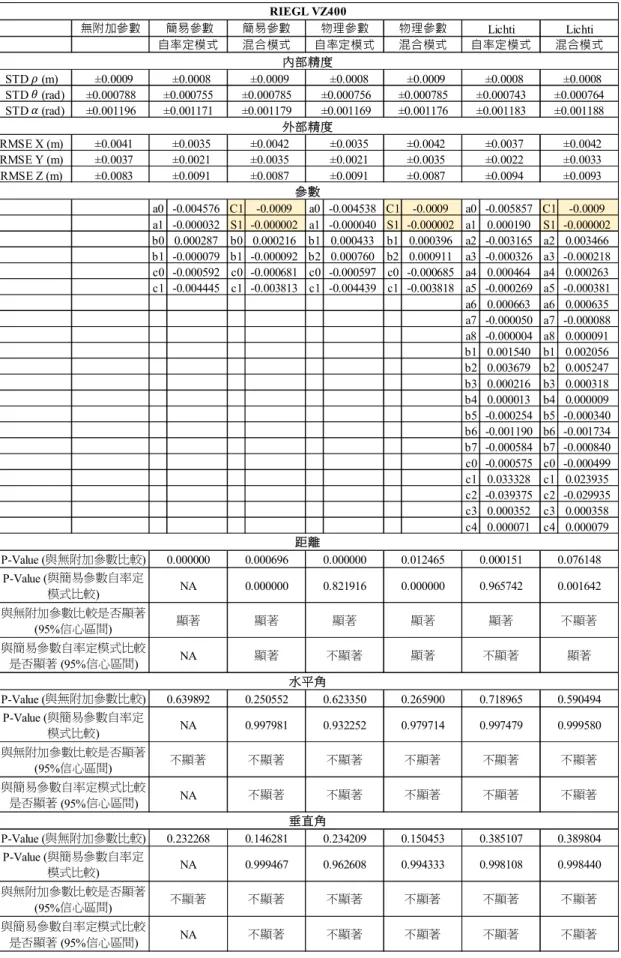
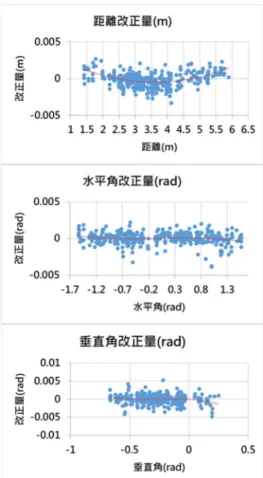
有關 RIEGL VZ-400 計算成果,觀察表 10「無 附加參數」部分,可發現 RIEGL VZ-400 在測距方 面的 STD 約 0.9mm,符合其規格之測距準確度,而 角度方面的 STD 亦偏大,水平角方面約 0.000788rad (約 0.045°),垂直角方面約 0.001196 rad (約 0.069°),
遠大於其規格之測角精度,除了測距偏短導致測角
誤差較為明顯外,該儀器已使用逾 5 年未回廠檢校 亦可能是原因之一,其改正量趨勢如圖 23 所示,可 發現與前兩台儀器不同,整體改正量變化趨勢並非 為趨近於 0 的平坦直線。
比較 RIEGL VZ-400 平差計算得到的校正標量 測值與校正標標準值差異 (器差),成果如圖 24 所 示,可發現整體器差趨勢以線性項變化為主附帶正 弦週期變化,且器差值於 XY 軸向分布於-10~5 mm 內,於 Z 軸向分布於-15~15 mm 內,相同現象同樣 反映於 XYZ 軸向之 RMSE,尤其 Z 軸向之 RMSE 已將近 8 mm。
針對表 10 中自率定模式部分,與前兩款儀器 相同,呈現加入改正參數確實能有效吸收誤差的現 象。除垂直角方面之外,整體而言,亦呈現使用越 複雜的數學模型,STD 與 RMSE 越好的現象,推斷 儀器垂直角部分組件可能含有問題,導致儀器的垂 直角誤差無法以目前的數學模式完善描述。
為了量化不同自率定模式測試組合顯著的程 度,利用 t-test 進行統計檢定,結果如表 10。與前 兩款儀器不同,與「無附加參數」比較,在 95%信 心區間下,三個自率定模式測試組合僅在測距方面 顯著,而若以「簡易參數自率定模式」為基準,則 皆不顯著,此處可初步判斷 RIEGL VZ-400 在測距 方面的系統性誤差模式中亦以常數項與線性項為 主。
針對測試組合中混合模式部分,從表 10 可發 現,與前兩台儀器相同,可發現與「無附加參數」
比較,距離方面「簡易參數混合模式」、「物理參數 混合模式」為顯著,而若以「簡易參數自率定模式」
為基準,三個混合模式在距離方面亦仍為顯著,意 即 RIEGL VZ-400 使用自率定模式的參數解算成果 與測距校正得到之加常數與乘常數有明顯不同且 其會影響校正成果。
又從表 10 可以發現,與前兩款儀器相同,數學 模式類似的自率定模式、混合模式測試組合,其參 數解算成果並不相同,初步推論為混合模式中帶入 加常數與乘常數能達到約制平差計算的效果。
表 10 校正計算及統計檢定成果 (RIEGL VZ-400)
無附加參數
STD (m) ±0.0009 STD (rad) ±0.000788 STD (rad) ±0.001196
RMSE X (m) ±0.0041 RMSE Y (m) ±0.0037 RMSE Z (m) ±0.0083
a0 -0.004576 C1 -0.0009 a0 -0.004538 C1 -0.0009 a0 -0.005857 C1 -0.0009 a1 -0.000032 S1 -0.000002 a1 -0.000040 S1 -0.000002 a1 0.000190 S1 -0.000002 b0 0.000287 b0 0.000216 b1 0.000433 b1 0.000396 a2 -0.003165 a2 0.003466 b1 -0.000079 b1 -0.000092 b2 0.000760 b2 0.000911 a3 -0.000326 a3 -0.000218 c0 -0.000592 c0 -0.000681 c0 -0.000597 c0 -0.000685 a4 0.000464 a4 0.000263 c1 -0.004445 c1 -0.003813 c1 -0.004439 c1 -0.003818 a5 -0.000269 a5 -0.000381 a6 0.000663 a6 0.000635 a7 -0.000050 a7 -0.000088 a8 -0.000004 a8 0.000091 b1 0.001540 b1 0.002056 b2 0.003679 b2 0.005247 b3 0.000216 b3 0.000318 b4 0.000013 b4 0.000009 b5 -0.000254 b5 -0.000340 b6 -0.001190 b6 -0.001734 b7 -0.000584 b7 -0.000840 c0 -0.000575 c0 -0.000499 c1 0.033328 c1 0.023935 c2 -0.039375 c2 -0.029935 c3 0.000352 c3 0.000358 c4 0.000071 c4 0.000079
不顯著 不顯著
與簡易參數自率定模式比較
是否顯著 (95%信心區間) NA 不顯著 不顯著 不顯著
0.998108 0.998440 與無附加參數比較是否顯著
(95%信心區間) 不顯著 不顯著 不顯著 不顯著 不顯著 不顯著
P-Value (與簡易參數自率定
模式比較) NA 0.999467 0.962608 0.994333
不顯著 不顯著
垂直角
P-Value (與無附加參數比較) 0.232268 0.146281 0.234209 0.150453 0.385107 0.389804 與簡易參數自率定模式比較
是否顯著 (95%信心區間) NA 不顯著 不顯著 不顯著
0.997479 0.999580 與無附加參數比較是否顯著
(95%信心區間) 不顯著 不顯著 不顯著 不顯著 不顯著 不顯著
P-Value (與簡易參數自率定
模式比較) NA 0.997981 0.932252 0.979714
不顯著 顯著
水平角
P-Value (與無附加參數比較) 0.639892 0.250552 0.623350 0.265900 0.718965 0.590494 與簡易參數自率定模式比較
是否顯著 (95%信心區間) NA 顯著 不顯著 顯著
0.965742 0.001642 與無附加參數比較是否顯著
(95%信心區間) 顯著 顯著 顯著 顯著 顯著 不顯著
距離
P-Value (與無附加參數比較) 0.000000 0.000696 0.000000 0.012465 0.000151 0.076148 P-Value (與簡易參數自率定
模式比較) NA 0.000000 0.821916 0.000000
RIEGL VZ400
參數
±0.0008 ±0.0009 ±0.0008 ±0.0009 ±0.0008
±0.0091 ±0.0087 ±0.0091 ±0.0087 ±0.0094 ±0.0093 ±0.0042 ±0.0022 ±0.0033 ±0.0037
±0.0021 ±0.0035 ±0.0021 ±0.0035
±0.001179 ±0.001169 ±0.001176 外部精度
Lichti Lichti
±0.000785 ±0.000756 ±0.000785 ±0.000743 ±0.000764 ±0.0008
自率定模式 混合模式 自率定模式 混合模式
簡易參數 簡易參數 物理參數 物理參數
±0.000755
±0.001171
±0.0035
自率定模式
±0.001183 內部精度
混合模式
±0.001188
±0.0042 ±0.0035 ±0.0042
圖 23 RIEGL VZ-400 無附加參數改正量
圖 24 RIEGL VZ-400 無附加參數各軸向器差
5.3 綜合比較分析
地面雷射掃描儀會因出廠年代不同、規格設計、
參數設定與使用方式等,而影響其掃描精度,各廠 牌地面雷射掃描儀的掃描精度仍有待進一步評估,
本研究實驗結果僅就受測試儀器之數據進行整理 分析。
由三款地面雷射掃描儀測試結果可以得知:
(1) 本研究提出之方法可以有效評估受測試儀器之 掃描精度,藉此判斷是否必須送回原廠檢校。
(2) 根據三款地面雷射掃描儀測試結果,加入系統 性誤差改正參數的確能有效吸收觀測量中含有 的誤差,對計算成果的 STD 與 RMSE 有正面影 響。
(3) 與「無附加參數」測試組合相比,三款地面雷 射掃描儀測試結果,不論是自率定模式、混合 模式,都是以「簡易參數」測試組合改善最為 顯著,初步可判定常數項與線性項改正參數已 足以描述地面雷射掃描儀的系統性誤差。
(4) 根據三款儀器測試結果,針對數學模式類似的 自率定模式、混合模式測試組合,混合模式的 STD 及 RMSE 雖然皆比自率定模式差,但差異 並不明顯,而參數解算成果卻有明顯不同,初 步推論是帶入的加常數與乘常數發揮了約制平 差計算的效果。
接續前兩項,「簡易參數」測試組合已足以描述 地面雷射掃描儀的系統性誤差,而帶入個別組件校 正得到的參數混合模式更能達到約制的效果,讓計 算成果更為合理。
6. 結論與建議
本研究為未來建立校正實驗室之先期研究,主 要目標為驗證將自率定法結合個別組件校正的混 合模式校正理論。
混合模式校正於引入雷射測距改正參數於室 內校正場的自率定校正方法時,根據三款地面雷射 掃描儀測試結果,加入系統性誤差改正參數的確能 有效吸收觀測量中含有的誤差,對計算成果的 STD 與 RMSE 有正面影響。透過 t-test 進行統計檢定,
與「無附加參數」測試組合相比,7 種不同的改正 參數組合中以「簡易參數」測試組合改善最為顯著,
意即「簡易參數」測試組合已足以描述地面雷射掃 描儀的系統性誤差。
從三款儀器測試結果可發現,針對數學模式類 似的自率定模式、混合模式測試組合的改正參數解 算成果不同,由於混合模式引入的雷射測距改正參 數是以較嚴謹的個別組件校正計算得到,本研究相 信引入加常數與乘常數的混合模式能達到約制的 效果,進而得到更合理的參數解算成果,因此未來 混合模式校正計算應採用「簡易參數混合模式」的 形式。
根據平差計算原理,於自率定法中固定、帶入 任何參數,都必然會對平差結果造成影響,包含其 他未知參數之解算成果與內外部精度。本研究以測 距校正推估儀器加常數 C 及乘常數 S,並視為真值 代入自率定模式中進行其他參數校正之作法,雖經 過 t-test 顯示成果顯著,惟此顯著是否完全代表「正 確」還須進一步研究,如由迴歸模式推估而得之加 常數 C 及乘常數 S 是否帶有誤差,而該誤差是否會 對自率定法的平差結果造成影響。
根據校正計算結果,應用本研究提出之方法來 對地面雷射掃描儀進行校正與系統性誤差分析,的 確可以為地面雷射掃描儀校正帶來正面的影響。估 算合理的系統性誤差改正參數並將其加入自率定 法計算作為約制,避免平差計算過度修正,藉此增 加自率定法使用之系統性誤差數學模型的合理性 與準確性,讓使用者可以更謹慎地了解儀器目前量 測品質,並可依計算結果評估是否該儀器需回原廠 檢校或者以系統性誤差改正參數修正點雲資料。
另根據本研究測距校正部分可推論,儘管地面 雷射掃描儀的確能獲取其宣稱有效距離內的點雲,
卻不一定能保證成果點雲的品質。儀器規格書或校 正成果提供的測角或測距精度僅反映該儀器於特 定條件下的狀況,在不同條件的環境下 (例如遠大 於校正場的距離、特殊反射材質等等),儀器可能無 法達到相同的精度,又或者容易產生雜訊或變形。
未來使用者應依其掃描目的或掃描環境,利用合適 方法評估、挑選符合實際需求的地面雷射掃描儀。
本研究仍有許多待改進之處,以下提供建議:
混合模式除了距離參數外,其他參數成果是否「正 確」還須進一步研究;測距太短將導致測角誤差更 為明顯,未來應挑選更大的室內空間;挑選室外標 準基線場時應注意位置,避免往來人潮導致施測不 易;不同廠牌之掃描參數設定與儀器規格差異,導 致無法以相同標準的點雲資料進行比較,目前此點 尚無法克服。
致謝
本研究承蒙內政部國土測繪中心「109 年度建 立地面三維雷射掃描儀校正系統採購案」 (NLSC- 109-35) 經費補助,謹此致謝。
參考文獻
吳建廷,2013。地面三維雷射掃描儀影響精度因子 之研究,國立交通大學土木工程系博士論文。
[Wu, C.T., 2013. A study on influence factors of the terrestrial LiDAR accuracy, PhD Thesis, National Chiao Tung University, Taiwan, ROC.
(in Chinese)]
邱明全、曾耀賢、林燕山,2007。固定式基樁基線 量測不確定度模式分析及建立之研究-以黎明 基線場為例,地籍測量:中華民國地籍測量學 會會刊,26(4):50-68。[Chiou, M.C., Tseng, Y.H., and Lin, Y.S., 2007. Study on building and analyzing the model of uncertainty of measurement for Li-ming calibration site, Journal of Cadastral Survey, 26(4): 50-68. (in Chinese)]
曾義星、林見福、蔡漢龍、陳鶴欽、曾耀賢,2008。
地面光達系統誤差分析及校正。地籍測量:中 華民國地籍測量學會會刊,27(1):39-50。[Tseng, Y.H., Lin, C.F., Tsai, H.L., Chen, H.C., and Tseng, Y.H., 2008. The analysis of systematic errors and calibration of ground-based LIDAR, Journal of Cadastral Survey, 27(1): 39-50. (in Chinese)]
蔡漢龍,2007。地面光達幾何校正系統設計與實施,
國立成功大學測量及空間資訊學系碩士論文。
[Tsai, H.L., 2007. A design and its implementation of geometric calibration system for ground-based LiDARs, Master Thesis, National Cheng Kung University, Taiwan, ROC. (in Chinese)]
賴志凱,2004。地面雷射掃瞄儀的精度分析與檢定,
國立成功大學測量及空間資訊學系碩士論文。
[Lai, C.K., 2004. Accuracy analysis and calibrationof ground-based laser scanners, Master Thesis, National Cheng Kung University, Taiwan, ROC. (in Chinese)]
Bae, K.-H., and Lichti, D., 2007. On-site self- calibration using planar features for terrestrial laser scanners, Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 36 (Part 3/W52):
14-19.
Chow, J.C., Lichti, D.D., and Teskey, W.F., 2010. Self- calibration of the Trimble (Mensi) GS 200 terrestrial laser scanner, Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 38: 161-166.
Chow, J.C.K., Lichti, D.D., Glennie, C., and Hartzell, P., 2013. Improvements to and comparison of static terrestrial LiDAR self-calibration methods, Sensors, 13(6): 7224-7249.
Ge, X., 2016. Terrestrial laser scanning technology from calibration to registration with respect to deformation monitoring, PhD Thesis, Technische Universität München.
Ge, X., and Wunderlich, T., 2015. Target identification in terrestrial laser scanning, Survey Review, 47(341): 129-140.
ISO, 2012. ISO 17123-4:2012 Optics and optical instruments - Field procedures for testing geodetic
and surveying instruments - Part 4: Electro-optical distance meters (EDM measurements to reflectors).
Lerma, J.L., and García-San-Miguel, D., 2014. Self- calibration of terrestrial laser scanners: selection of the best geometric additional parameters, ISPRS Annals of Photogrammetry, Remote Sensing & Spatial Information Sciences, 2(5):219-226.
Lichti, D.D., 2007. Error modelling, calibration and analysis of an AM-CW terrestrial laser scanner system, ISPRS Journal of Photogrammetry and Remote Sensing, 61(5): 307-324.
Lichti, D.D., 2010a. A review of geometric models and self-calibration methods for terrestrial laser scanners, Boletim de Ciencias Geodesicas, 16(1):
3-19.
Lichti, D.D., 2010b. Terrestrial laser scanner self- calibration: Correlation sources and their mitigation, ISPRS Journal of Photogrammetry and Remote Sensing, 65(1): 93-102.
Lichti, D.D., and Licht, M.G., 2006. Experiences with terrestrial laser scanner modelling and accuracy assessment, Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 36(5): 155-160.
Lichti, D.D., Chow, J., and Lahamy, H., 2011.
Parameter de-correlation and model-identification in hybrid-style terrestrial laser scanner self- calibration, ISPRS Journal of Photogrammetry and Remote Sensing, 66(3): 317-326.
Schulz, T., 2008. Calibration of a terrestrial laser scanner for engineering geodesy, PhD Thesis, (Vol.
96): ETH Zurich, Zurich, Switerland.
1Master, Department of Geomatics, National Cheng Kung University Received Date: Jan. 30, 2021
2Professor, Department of Geomatics, National Cheng Kung University Revised Date: Mar. 17, 2021
* Corresponding Author, E-mail: [email protected] Accepted Date: Mar. 31, 2021
Hybrid Calibration System and Systematic Error Analysis for Terrestrial Laser Scanners
Hsuan-Sheng Lin
1*Yi-Hsing Tseng
2Abstract
To describe the systematic error of the Terrestrial Laser Scanners (TLS) more reasonably, based on the self- calibration method, a hybrid calibration theory that combines self-calibration and individual component calibration is proposed. In this study, FARO S350, Trimble SX10 and RIEGL VZ-400 were used to test at the National Land Surveying Center (NLSC). According to the results of t-test (in the 95% confidence interval), using systematic error calibration parameters can effectively simulate the TLS systemic error model. The results also show that the constant and linear calibration parameters are sufficient to describe the systematic errors of the three scanners used in this study, and the calibration parameters obtained from the individual component calibration can achieve a reduced effect. These show that the theory proposed in this study have the potential for more careful analysis of TLS calibration and evaluation of systematic errors.