輪椅㆖㆘車㉂動搬運裝置之設計開發
李明義 陳世宏
長庚大學機械工程研究所
摘 要
目前國內無障礙環境及相關設施並不夠周全,尤其在交通、建築設施大多 以正常人之需要來設計,鮮少考慮到輪椅乘坐者及年長者之特殊需要。以上下 車為例,由於目前各種交通工具上並未加裝供輪椅上下車之裝置,造成輪椅乘 坐者必須倚靠他人協助才能上下車,不但費時、費力,而且在搬運過程對輪椅 乘坐者也有潛在的危險。因此,本研究主要目的係設計開發一套輪椅上下車自 動搬運裝置,可固設於箱型車之後車廂內部,讓輪椅乘坐者能在無旁人的協助 下方便自行操控升降台,使其能連同輪椅順利且安全地上下車。本項設計之特 色為兩組電動缸同步致動升降平台、斷電時手動安全操控機制、折收與升降動 作採相同兩組電動缸以兩段式完成、單晶片微電腦回饋控制功能以及安全防滑 落安全擋板設計等。
關鍵詞:輪椅上下車、自動化、機構設計、殘障者。
DESIGN AND DEVELOPMENT OF AN AUTOMATED WHEELCHAIR LIFTING DEVICE
Ming-Yin Lee Shi-Hung Chen
Graduate Institute of Mechanical Engineering Chang Gung University
Taoyuan, Taiwan 259, R.O.C
Key Words: wheelchair lift, automation, mechanism design, disabled.
ABSTRACT
This paper describes the development of an automatic wheelchair lift- ing device which is fixed inside a full-size van. A wheelchair user and wheelchair can be transferred from the ground level to the vehicle floor level and back again safely, automatically, and all by the wheel-chair user.
The development process included the mechanism’s conceptual design, motion simulation, engineering analysis, prototypig development and test- ing. This device can help wheel chair users to overcome environmental bar- rier, to improve independence of their daily living, and to decrease loading on the care-giver.
㆒、前 言
根據內政部統計,我國領有殘障手冊者約有57 萬人,
其中肢體殘障者約佔25 萬人,這些下肢殘障者大多需仰賴 輪椅代步[1];除此,我國 65 歲以上之老人人口也於民國 82 年超過全國人口之 7%,使我國正式邁入高齡化社會;
這群年長者由於年齡的增長及疾病之困擾,常會造成肌肉
(a)雙懸臂平行四連桿式 (b)單懸臂旋轉移入式 圖 1 機構概念設計圖
骨骼功能之衰退,必須仰賴輪椅來代步。
雖然近年來政府積極提倡無障礙空間的改善,從公共 建築設施加設殘障專用斜坡道、導盲磚,到最近的捷運列 車加裝輪椅升降裝置、277 號殘障公車及復康巴士的興辦 與實施,都是為殘障朋友解決交通問題之具體成效。除此,
政府也鼓勵民間各機構、企業團體及學界分工合作,致力 於殘障者輔具的開發,讓殘障者能獲得更好的生活品質。
然而目前國內無障礙環境及設施並不夠周全,就以輪 椅乘坐者上下車為例,由於目前各種交通工具上並未加裝 供輪椅上下車之裝置,造成輪椅乘坐者必須倚靠他人協助 才能上下車,不但費時、費力,而且在搬運過程中對輪椅 乘坐者也有潛在的危險;另外,國外雖有輪椅上下車搬運 設備,但是價格昂貴且難以符合國人體型,使用上不方便;
基於以上原因,本研究之主要目的在於開發一套本土化輪 椅上下車自動搬運裝置,其特色為:(1)兩組電動缸同步 致動升降平台,取代傳統油壓致動方式,減少油壓系統複 雜的周邊設備,也可避免漏油、增加維修之便利性;(2)
增加緊急手動安全操控機制,可供斷電時切換為人工操 作,使升降平台可安全起降;(3)平台升降及折疊收放採 用兩組相同之電動缸以兩段式達成,收放機構採雙曲柄滑 塊機構與滑輪組合方式,構造簡單,維修方便;(4)採用 單晶片微電腦控制架構,增加升降動作之平順與安全;(5)
升降平台離地自動驅動防滑落安全擋板,合乎安全規範也 可增加系統之安全性。
㆓、文獻調查
歐美國家於 1970 年起便強調融合運輸系統之軟硬體 設施以滿足各類使用者不同運輸需求[2],並且具備完善安 全規範以保護使用者安全。目前國內外有關輪椅上下車輔 助設施之安全規範大致以美國身心障礙法(ADA)最具代 表性,其中規定標準升降平台尺寸121(76 公分以上、兩 側護邊高10.7 公分、防滑落擋板高度 20 公分以上[3];此 外,國內交通部運輸研究所也彙整相關規範,如升降平台 最低載重272 公斤、升降速度不得大於 16 公分/每秒、水
平或垂直加速度不超過0.3G 等。其他周邊措施還包括殘障 運輸車輛之外觀標示、輪椅停靠空間尺寸、輪椅於殘障者 安全固定設施、按鈕設置、聲音導引等[4]。
根據調查,目前市售之輪椅上下車自動搬運裝置,其 機構之設計大致上可分為單懸臂與雙懸臂兩種形式。
Deacon 於 1973 年首次開發出雙懸臂平行四連桿機構,利 用鍊條牽動雙懸臂可使平台產生升降機制[5];美國 Crow River 公司於 1994 年開發出一種單懸臂平行四連桿裝置 [6];此外,美國 Ricon 公司所開發之雙懸臂平行四連桿機 構,整合了平台升降、收放及安全防護等功能,為目前市 售最常見之機種[7];日本 Lift 公司推出單懸臂輪椅上下車 機構,為典型油壓驅動之機種[8];而國內何秋明先生也提 出以鋼索懸吊輪椅結構之自動上下車搬運裝置,其原理係 利用馬達捲揚鋼索,將病患和輪椅一併懸吊後再轉進車輛 內[9]。由文獻調查中可知,國內多仰賴國外進口產品,不 但價格昂貴,而且在國內維修不易、另外部份機種不適合 國內中小型箱型車居多之環境,這些因素是本研究開發之 動機。
㆔、研究方法與步驟
本研究之輪椅上下車自動搬運裝置機構設計步驟可分 為機構概念設計、機構運動學分析、平行四連桿機構骨架 設計、安全扶手與平台折收機構開發設計、防滑落安全擋 板機構設計、斷電緊急手動機構開發設計、電動缸配置設 計、電動缸同步控制器開發設計等部份。茲分別敘述如後:
1.機構概念設計
輪椅搬運裝置最主要的動作即為升降台的上升與下降 運動,在升降過程中還必須考慮升降台是否能保持與地面 平行,避免輪椅使用者有滑出升降台的情形發生;本研究 所考慮之升降台設計方案有下列兩種:
為突破傳統輪椅上下車自動搬運裝置採用油壓致動方 式,造成周邊設備複雜及漏油之缺點,本研究係採電動缸 致動方式,如圖1(a)所示為典型雙懸臂平行四連桿機構,
r1
r2
ψ
X Y
x y
P O
T S
車體
Q
R
r3 r5 r4
r6
P θ
θ
θ1
X O
r7
Q R T Y
S
圖 2 平行㆕連桿機構向量分析圖
其特點包括設備簡單、穩定、高承載能力等,運動方式係 利用電動缸推動平行四連桿之對角樞軸,使升降平台產生 上升且往車內移之運動路徑,而達到升降搬運目的;另一 項概念設計如圖1(b)所示,係利用一組垂直升降電動缸 與一組線性滑軌產生升降與內移之機制,可幫助輪椅使用 者在不離開平台情況下進出車輛。本研究在考慮機構穩定 度及載重容量等因素下,選擇方案(a)之雙懸臂平行四連桿 式機構,配合安全法規進行開發設計。
2.機構運動㈻分析
本研究為瞭解前述圖1(a)機構概念設計方案之平行四 連桿運動特性,亦進行了機構運動學分析以確認機構運動 軌跡。如圖2、3 所示,本項輪椅上下車機構運動方式係以 改變電動缸桿件r3 位移,尋求前桿 r6 端點 P 之運動軌跡,
座標定義以O 點為原點且 X 軸與 r1 向量重疊,待求出 P 點X、Y 座標後進行座標轉換,以確認機構運動軌跡與車 體間之運動關係,避免機構運作時與車體發生碰撞。
設r1//r4;r2//r5 且 r1=(r4−QR);r2=r5 ) cos 2 1 ( 2 1 2
32=r 2+r 2+ r ⋅r θ r
⋅
−
= − −
) 2 1 ( 2
1 2 cos 1 32 2 2
r r
r r θ r
∴ (1)
) 1 sin(
6 ) 1 4 ( cos
5 θ+ − + θ −π
=r r r r
Px (2)
) 1 cos(
6 sin
5 θ− θ −π
=r r
Py (3)
將式(1)中θ代入(2)、(3)式中可得:
) 1 sin(
6 ) 1 4 ) (
2 1 ( 2
1 2
5 32 2 2 + − + θ −π
⋅
−
= − r r r
r r
r r r r
Px (4)
圖 3 平行㆕連桿機構示意圖
) 1 cos(
) 6 2 1 ( 2
1 2 cos 3
sin 5
2 2
1 2 − θ −π
⋅
−
= − − r
r r
r r r r
Py (5)
如圖3 所示,為了轉換 P 點座標成分 Px、Py,為另一座標
系之座標x、y,首先定義座標系轉換矩陣 Φ 如下(式中ψ
為X-Y 和 x-y 兩組座標系之夾角):
−
= Φ
1 0 0
0 cos sin
0 sin cos
φ φ
φ φ
(6)
∵ (7)
Φ
=
PzPyPx z
yx
π
− θ
−
⋅
−
−
π
− θ +
−
+
⋅
−
−
Φ
=
∴ −
0
) 1 cos(
) 6 2 1 ( 2
1 2 cos 3
sin 5
) 1 sin(
6 ) 1 4 ) (
2 1 ( 2
1 2 5 3
0
2 2 1 2
2 2 2
r r r
r r r r
r r r r
r r r r r
yx
(8)
為尋求最佳之平行四連桿組中各連桿之尺寸(r1, r2, r4, r5),由以上推導可知,在已知 θ1、r6、ψ以及電動缸行程 量r3 之條件下,可由式(8)計算出平台升降過程移動之 軌跡,作為下節設計平行四連桿機構骨架之運算依據。
3.平行㆕連機構骨架設計
平行四連桿機構之尺寸關係到整體機構是否可裝置在 箱型車上正常運作,若連桿長度過短,則機構安裝深度(離 保險桿之距離)愈淺,若連桿長度過長,則機構折收後之
圖 4 前桿端點運動軌跡圖
整體高度可能超越車箱內部高度,而與車體發生碰撞,因 此本研究在進行雙懸臂平行四連桿機構開發設計前,還進 行了兩項工作:一、確認市售車種車箱內部各部位尺寸;
二、評估連桿長度與機構安裝之深度。由前節市售箱型車 調查結果,一般常見箱型車內部高度約1350~1415 mm,
車台高度約500~525 mm,在確認車箱尺寸後,本研究也 利用前節運動學推導結果,實際代入各連桿參數,以每10 mm 行程為單位可模擬前桿端點運動軌跡(如圖 4 所示),
由軌跡模擬可確定升降高度可達600 mm,安裝深度約 300 mm,機構折收整體高度小於 1350 mm,符合一般箱型車 使用。
4.安全扶手與平台折收機構開發設計
根 據 美 國 身 心 障 礙 法 (ADA ) 規 定 , 安 全 扶 手
(Handrails)須採用可拆卸之模組化設計方式,扶手圓管 直徑必須為3 公分,且可承受任何方向 45 公斤之力量而不 會變形。本研究所設計之安全扶手係裝設於平行四連桿之 前桿機構上,供使用者搭乘升降平台時扶撐用,為使設計 能避免和國外相關專利設計衝突,本設計係採用兩組曲柄 滑塊機構和動滑輪、定滑輪組,當進入折收狀態時,安全 扶手牽引動滑輪拉動鋼索使平台完成折收動作。
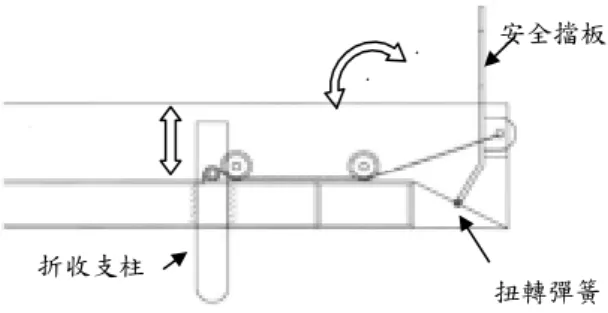
5.防滑落安全擋板(Roll Stop)開發設計
根據ADA 安全規定,升降平台之前端須加裝安全防 滑落擋板,擋板高度不得低於10 cm,擋板寬度不得小於 出入寬度之92%,並且當擋板完全直立時,必須要能承受
( 用 扭
直
圖 5 安全防滑落安全擋板機構示意圖
6.斷電緊急手動機構開發設計
本研究為增加輪椅上下車機構在失去電力供應時,具 有緊急切換為手動操作之功能,特別設計了一組手動曲柄 搖桿,其可配合系統在斷電時使平台進行折疊、收放之動 作。由於市售輪椅上下車自動搬運裝置係採油壓致動方 式,當斷電時則係採手動幫浦與洩油閥進行機構上升或下 降,而本設計使用加維公司研製之SJ455 型電動缸,因此 斷電手動機構之設計是一組與電動缸尾座相配合之套筒,
套筒內還設置有一組傘形齒輪可進行變速與轉向,進行手 動操控時,外加一具手搖曲柄同步旋轉升降平台兩側懸臂 內固設之電動缸輸出螺桿,以達到機構升降之目的。本設 計之緊急手動操作,另外也考慮符合ADA 安全法規所規 定的升降速度不得大於16 cm/sec。
7.電動缸配置設計
本系統係採用直流電動缸為機構主要驅動組件,馬達 規格為永磁式DC-12V,馬達轉速 3600R.P.M 配合 8 T/inch 螺桿,基本原理係以馬達傳動,經減速箱產生低速高扭矩 之輸出,帶動螺桿旋轉,使外覆套筒產生線性移動,齒輪 減速比20:1,因此線性速度範圍為 9~11 mm/sec。
為使升降平台能平順地升降,本研究係採兩組電動缸 同步輸出,透過機構組合達成升降台升降與折疊之動作,
如前節運動學分析,當升降平台升降總高度為 650 mm 時,電動缸所需總行程為350 mm,電動缸升降行程為 237.3 mm,佔電動缸總行程約 70.3%、折疊行程為 100.1 mm,
佔29.7%,單組電動缸有效出力約為 600 KG。
8.電動缸同步控制器開發設計
本研究控制器之設計係採『單晶片微電腦速度回饋控 制』架構,控制器之基本原理係以裝設在電動缸底座內部 之速度感測元件,將兩支電動缸輸出螺桿旋轉角度轉換為 脈衝之電氣訊號,再將訊號傳至單晶片微電腦進行訊號比 較,微電腦以脈衝頻寬調變(PWM)方式即時調整轉速較 高之電動缸功率,降低較高速之電動缸電壓,同時較低速 之電動缸則以全功率運轉。
此外,控制器中設有位置記憶功能,當其中一組電動 缸因外力停止動作時,微電腦將計算兩組電動缸之誤差
安全擋板
折收支柱 扭轉彈簧
1340N(約 136.7 kg)之側向力量,其主要係防止輪椅滑動 rolling off)移出平台造成意外。因此本研究之設計係採 一組折收支柱,透過鋼索及滑輪組機構,帶動一組裝有 轉彈簧之擋板(如圖5 所示),當折收支柱接觸地面時,
滑輪可自動牽動鋼索使擋板向內攤平,方便使用者進出車 台,當升降平台上升時則擋板會因扭轉彈簧之扭力回復成 立狀態,達到安全防滑落之目的。經過估算,檔板折收 支柱工作行程44 mm,鋼索工作行程 88 mm,因此如果平 台升降速率為20 mm/s 時,擋板收放時間為 2.2sec。
τ
>
− 2
1
m V
V
NO
YES YES
Vm1 壓降 Vm2 壓降
中斷PWM 訊號 誤 差 量 記 憶
2
1 m
Vm > V
m
NO
初 始 化
指 令 輸 入
P W M 輸出
兩 組 馬 達
速 度 反 饋
圖 6 電動缸同步控制流程圖
量,當誤差量超越設定之誤差值時電動缸將完全停止動 作,待外在障礙排除後,微電腦讀取記憶體內部記錄之誤 差量,使電動缸位置達到補正之效果,回復故障前之狀態,
此功能可防止平台升降過程中因故障而傾斜,故具有安全 防護之功能。
圖6 為本研究所設計之兩組電動缸同步控制流程,首 先當電源輸入時,系統會自動設定執行參數(如工作週期、
加減速時間、I/O 埠),隨使用者觸發升降平台啟動訊號時,
系統將會自動轉換為PWM 訊號驅動電動缸,再由光學編 碼器讀取電動缸旋轉軸產生之脈衝訊號,並傳回控制器進 行誤差比較,完成電動缸回授控制之機制。
另外,電動缸尾部齒輪箱內還設有簡易光學編碼器,
當電動缸運轉時產生脈衝用以回授馬達轉速。本系統使用 光遮斷轉速偵測元件(Photo interrupter),配合 16 組放射 狀光閘,當光線通過或不通過偵測器時,感測器即輸出高 或低電位訊號,每轉動一轉,即輸出十六個高低脈衝(16 pulse/r),此信號經由運算放大器進入計數器,再經由多工 器將計數器資料分別讀入微電腦中,最後利用程式將此資 料轉換為馬達轉速,達成本系統速度偵測之功能。
㆕、機構運動模擬分析
本研究為了確保各機構元件在平台升降過程之運動軌
圖 7 Working Model 機構模擬示意圖
圖 8 模擬升降機構運動軌跡圖
跡合乎設計規範,也利用Working Model 2D 軟體,進行 平台機構運動模擬分析,首先將平行四連桿組之各連桿 尺寸依前節運動學推算結果代入,另外也將各連桿質 量、密度等參數輸入,圖7、8 為本研究電腦模擬之模式 建構與運動軌跡分析結果。模擬分析後可以確認當電動 缸輸入速度為10mm/sec 時,其升降平台上下總時程為 32 秒,除此,由升降平台之運動軌跡亦可確認其不致與車 箱底座發生干涉。
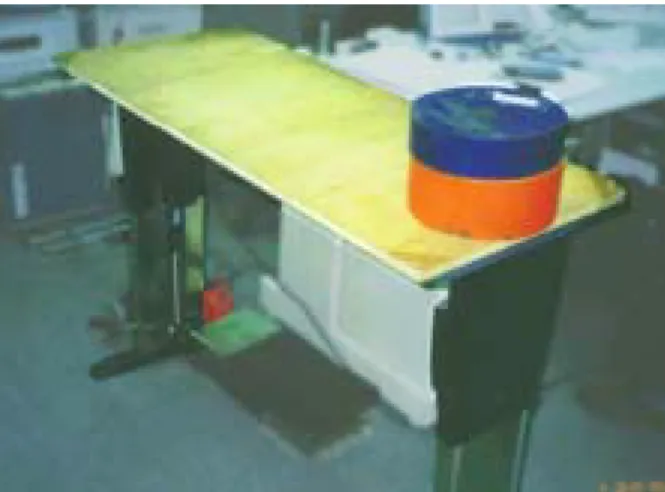
㈤、實體製作與測試
本研究為能確認上述設計具有實用性,也實體製作原 型機,原型機採全鋼骨結構製成,主要元件包括升降平台 機構及車箱模擬架台;升降平台上鋪設有鐵板網,平台兩 側固設之平行四連桿中各架設一組電動缸,電動缸則是採 用單晶片微電腦控制架構。實體原型機製作完成後,本研 究也進行多項功能測試(如圖9~11 所示),測試結果發現 升降機構在無負載情況下上升時間約38 秒、下降時間 36 秒;承載輪椅使用者(體重75KG)時上升時間約 40 秒、
圖 9 實體升降測試過程
圖 10 平台折收測試過程
下降時間34 秒,使用過程平順、低噪音。
㈥、結 論
本研究之目的主要係為了解決輪椅乘坐者克服上下車 不便之問題,自行開發並實體製作一套「輪椅上下車自動 搬運裝置」,目前已完成雛型實體製造,並申請專利中。未 來研究方向為探討將雙懸臂改為單懸臂式升降機構之可行 性,並且朝向低成本、高載重之設計目標進行設計改良,
以期能開發出安全、可靠且符合本土化居家環境之上下車 搬運機具,幫助推動國內無障礙交通運輸之發展,讓身心 障礙者有更多機會參與社會活動。
圖 11 電動缸同步控制砝碼載重測試
參考文獻
1. 內政部統計通報,「八十八年十九周—身心障礙者之年 齡」,台北(1999)。
2. 交通部運輸研究所,大眾運輸工具上殘障者輔助設施之 設置與使用問題,台北(1997)。
3. 交通部運輸研究所,固定路線無障礙運輸服務之運轉操 作,台北(1996)。
4. 交通部運輸研究所,殘障者輔助設施規格及檢驗研究,
台北(1996)。
5. Deacon, S. C., “Wheelchair Lift,” United States Patent (1973).
6. Stoen, J. J., “Foldable Platfrom Wheelchair lift with Safety Barrier,” United States Patent (1995).
7. Ricon Corporation , “Locking Wheelchair Lift,” United States Patent (1997).
8. 日本Lift株式會社,“Lift Gate”,日本神奈川縣,(1999)。
9. 何秋明,輪椅收取裝置,中華民國專利公報,第21卷第 32期(1993)。
88 年 11 月 19 日 收稿 89 年 01 月 18 日 初審 89 年 05 月 04 日 複審 89 年 05 月 17 日 接受