Proceedings of the 1996 IEEE
International Conference on Robotics and Automation Minneapolis, Minnesota
-
April 1996Petri Net Based
Dynamic
Scheduling
of
an Elevator
System
Chu-Hui
Lin
and
Li-Chen
Fu
Department of Computer Science and Information Engineering,
National Taiwan University, Taipei, Taiwan,
R.O.C.
Abstract
In this paper, a hybrid model of a multiple elevator system is proposed
,
consisting of a timed place Petri net ( T P P N ) model and a set of control rules imple- mented via the so-called control places in t h e T P P S model. The Petri net model is a highly modulized structure, whose constituent modules can be classi- fied into three types: Basic Movement Module. Load- ing/Unloading Module, and Direction Reversing Mod- ule. The whole complete model is a combination of the copies of the above three modules. Since the fir- ing sequences of the T P P N equate the evolution of the modeled system, they can be regarded as a schedule.A
heuristic search algorithm,A*
search, is thus used on the reachability graph of the T P P N model t o obtain the desirable schedule. To show t h e feasibility of the proposed method, an emulatorof
the elevator system is constructed for demonstration. The experiment re- sult for a 15-floor building with four elevators is shown t o be satisfactory.1
Introduction
N brief, an elevator group supervisory control sys-
I
tem(GSCS) is used t o supervise multiple elevators and t o ensure t h a t they are operated efficiently. The elevator group control system must decide which of several elevator cars should respond t o a call made by passengers, in order t o provide the highest possible level of services. To build a good elevator G S C S for solving the elevator scheduling problem, we need t obuild an elevator model first t o represent the coopera- tion of multiple elevators. Petri net [l, 21 has evolved into a n elegant and powerful graphical modeling tool for asynchronous, concurrent event-driven system and, therefore, is chosen here as a suitable modeling tool.
However, the elevator G S C S is usually involved with human behaviors and preferences. Very often, there
may not exist a n optimal scheduling solution and, hence, the control system must be flexible enough t o handle all possibly incoming situation. In view of this, a hybrid Petri net model is thus introduced in this pa- per t o serve the purpose, i.e., besides the conventional timed place Petri net model, several heuristic rules and control places are introduced t o enrich the flexibility of the aggregate model. Specifically speaking, these additional rules in the model will affect the general be- havior of the Petri net through direct adding/removing of tokens in the control places. Upon the occurence of an external event, the model will search for the feasi- ble rules t o adjust the marking of the resulting Pet,ri net, whereby the hybrid model will run properly t o produce an adequate scheduling result t o handle that external situation.
To facilitate the construction of the Petri net model of an elevator system, we first develop several fun- damental modules, each of which models a kind of mechanism in the elevator system and merge a number of copies of these modules t o synthesize the complete model of the whole elevator system. Since the schedul- ing problem of the elevator system is involved with multiple objectives, a set of rules are used t o assist the scheduling process by setting u p the proper crite- ria on the Petri net. These rules check the existing as well as the predicted call requests of an elevator syc tem and grossly determine the candidate elevator L ~ I S
for serving these call requests. Thus, such Petri net based scheduling system can determine a more precise schedule in pursuit of the expected optimality.
To date, there are researchers who have proposed to
apply colored Petri net to model real-time systems and have used the elevator system as examples [3,4]. How- ever, these models are only for system with one eleva- tor car and are in lack of the coordination ability which is necessary for an elevator
GSCS.
Due t o the fast de- velopment of computer technology, integrated circuit(IC)
and micro-computer have been widely employed nowadays in modern elevator systems. On the adventof this increasingly improving computation environ- ment, artificial intelligence (AI) technique has been introduced into the elevator
GSCS
[5, 61. Also, fuzzy control logics and expert systems are also used t o anal- yse the traffic pattern and t o predict the possibly in- coming call requests of elevator cars [tj, 7, 81. Appar- ently, utilization of the AI related techniques and ex- pert systems in the context of elevator system control is an indispensable trend.2 Petri Net Modeling
of
an Elevator
System
A Petri net can be drawn as a bi-partite graph whose nodes is a set of places and a set of transitions, which are linked t o each other by arcs. Places are rep- resented by circles, transitions by bars, and directed arcs by arrows. T h e multiplicity of arcs is represented by a slash line on arcs with a number (the multiplicity is not indicated when it is 1). Tokens are represented by small black dots or non-negative integers inside the places.
The mnrkin,g of a P N a t any time instant depicts the positlion of the tokens with respect t o the places of the P N . The firing of transitions incurs the P N
to change from a n odd marking t o a new marking. The marking of a P N helps t o define the state of the modeled system. Thus, t h e changes of states from the initial marking t o all its reachable markings yield the dynamic behavior of the modeled system.
2.1
Problem Definition
In general, the elevator group consist of multiple elevators or elevator cars. Each elevator has its own car controller and these is a group controller t o coordi- nate the behavior of the elevator system. The elevator halls and the car is furnished with hall buttons and car buttons, respectively.
As
soon as a hall button is pressed, the elevator control system must register the hall call, and select and assign a car in the eleva- tor group t o serve the hall call. After serving the hall call, the elevator must move up/down t o stop at the destination floor sequentially following the assignment order. When all calls are served, the elevator stops and waits for the next call t o arrive, and then repeats the above operation again.Due to the complexity of t h e full model, it is de- composed into several basic modules. Because the hardware architecture of the elevator system is highly symmetric from one floor t o another, various activities
of a n elevator at one floor are first detailedly analy- sized, and then different kinds of macro module are built according t o these activities. Finally, the full model of the elevator system in a n n-floor building is constructed by assembling t h e n copies of each of the above modules. In the following, detailed descriptions of those macro modules are given.
2.2
Basic:
Movement Module
T h e Basi: Movement Module is the fundamental part of the Petri net elevator model.
It
describes the detailed movement of a n elevator between floors. This Petri net module for up-movement is shown in the area enclosed by dotted lines in Fig. 1. In Fig. 2, the com- bination of modules for up-movement and for down- movement it, also shown.In Basic Mo'vement Module, all movements of an elevator is controlled by the so-called. 'ticket', the right t o move t o 1,he next floor for each elevator. When an elevator nee'cls to move from the current floor
i
t o the next adjacent higher floor for example, it must acquire a corresponding ticket tk-i-i+l first and insure t h a t its moving direction is in up-direction before it is allowed t o travel up t o the floor i+
1. For the sake of clarity, the notations of places used in Fig. 1 are explained as follows:floor-i
i
E ( I , ..
.,
lo}, represents the floor a t which the elevator stops. A token in f l o o r i means that, the elevator stops at the i-th floor and pal ks.t k - i - i j - 1 and n o - t k - i - i + l ,
i
E (1,..
. ,9}, represe i t the status of 'ticket' assignment, where tk-i-i+l and no-tk-i-it1 are a pair of exclusive places. At any time, there is one and only one token is placed in one of these two p1;ce.If
a token in place t k - i i + l , it means that the elevator can move from the i-th floor to the ( i + l ) - t h floor; otherwise, it can not.tk-i-i-1 and no-tk-ii-1, i E ( 2 , . . . , l o } , forms another pair of exclusive places, repre- sent whether there is a ticket from the i-th floor t o the (i-1)-th floor.
a s s i g n _ t k - i - i + l and a s s i g n - t k - i + l - i ,
i
E (1,. . .,9}, are control places t o be used t o generate proper tickets according to the control rules and t o insure t h a t the pairs of places t k - i i t l and no-tk-i-iS.1 and tk-i-i- 1 and no-tk-i-i-1 are exclusive.ascending and descending, represent the
direction of an elevator. Although an eleva- tor has both move-up ticket and move-dou-n ticket, the elevator generally moves according to its original direction. Later we will show how the direction can be changed.
speedup-i-ifl, mv_i-i+l, and slow-
down-i-i+l, i E ( 1 , . . . ,9}, represent the two possible trajectories by which the eleva- tor could travel up from the i-th floor to the (i+l)-th floor. When a parked elevator starts to move, it must accelerate first before its ve- locity can reach some constant value and then decelerate till it finally stops at the destina- tion floor. Concerning this, three places are used to represent the process. However, if the elevator is only going to pass by rather than stop at the ( i + l ) - t h floor, it need not decel- erate and then accelerate before and after it passes by that floor. So, the model will pro- vide two different kinds of trajectories: one is to slow down and then is ready to stop, whereas the other is to pass by and than to move directly t o the next floor. Notice these three places are all timed for each of them requires certain amount of time t o complete each corresponding motion phase.
s p e e d u p i i - 1 , mv-i-i-1, and
slowdowni-i-1, i E ( 2 , . . . , l o } , represent another two possible trajectories by which an elevator can travel down from the i-th floor to the (i-1)-th floor.
By repeating this strategy for every i, we can even- tually construct the full model of movement. Some no- tations used in our figures need to be explained here for ease of interpretation, which are, however, not the con- vention in the context of Petri net. In Fig. 1, the gray colored places are timed places, and the places with
the bold circumference, each of which has its unique name, mean that they have been drawn more than once in the figure, e.g. the ascending place in Fig, 1.
2.3
Loading/Unloading Module
The Loading/Unloading Module represents the ac- tion to let passengers get into or get out of the elevator when it stops at a floor. However, they appear in a more complicated form in Fig. 3 due t o the different situations under which an elevator needs t o stop. An elevator must stop at the floors designated by the pas- sengers inside the elevator (through car calls), but it
may not stop at the floors designated by the hall calls for some reason. But when an elevator stops at its destination floor designated by a car call, it can also serve the hall call invoked at the same floor so long as the floor designated by that hall call is on the way along the previous direction. Given the observation, n-e associate these predicates to different transitions t o represent the different situations, each with a com- bination of some pre-conditions. The result is shown in Fig. 3 .
The notations of places which are different from those in the Basic Movement Module are describcd as follows.
1) car-but& i E (1,. .. , l o } , represents the status of the car button corresponding to the i-th floors. For example, when a passenger wants to travel to the 5-th floor and presses the button marked with “5”, there will be a token generated in the place car-but-5. These places are also used t o reveal that there is always only one token in the pair of places stop-iandno-stopi, i.e, either in stop-iorinno-stop-i (to be explained below).
2) stop-i and nostop-i, i E ( 1 , . . .
,
lo}, rep- resent the status of car call. They are also ex- clusive places. If a token is placed in stop-i, it means that the elevator must move to the i-th floor to let the passengers get off. 0 t h - erwise the elevator will note stop at the i-th floor.3) uph-but-i and down-h-but-i, i E (1,. . .
,
lo}, represent the status of up/down hall button on the i-th floor. If the hall but- ton is pressed, a token is placed in the corre- sponding place. Note that the status of these places will have effects on the places up-hc-i, no-up-hc-i, d o w n h i , and no-down-hc-i (to be explained below).4)
u p h c - i , no-up-hc-i, down-hc-i and no-downhc-i, i E (1,. ..
,
lo}, represent the status of upidown hall calls made on the i-th floor.If
there are passengers who request the service of the elevators, the correspond- ing place is marked.5) handlehc-i, i E (1,.
.
.,
lo}, is a intermedi- ate place used for connection.6 ) L-U-i, i E (1,. .. , l o } , represents loading and unloading operation. It is a timed place and hence is colored grey.
7 ) on-duty-i,
i
E (1 , . . . , l o } , is the control place mainly used for the scheduling system. Once the scheduling system decides t o dis- patch an elevator t o respond t o a up-hall call, it is not reasonable t o dispatch this elevator t o serve another down-hall call before send- ing the passenger(s) who has (have) made the up-hall call t o his destination. This control place is thus needed t o inform the scheduling system to prevent such case.In Fig. 3, we first check whether the car call is present, and then use three transitions t o check the status of the hall call: 1) There is no hall call a t all, 2 ) there is an up-hall call and the elevator is moving up, and 3 ) there is a down-hall call and the elevator is moving down. Once one these three cases is sat- isfied, the loading/unloading operation begins. -4fter the loading/unloading operation is completed, the el- evator is available t o move up or down again.
2.4
Direction Reversing Module
Besides the Basic Movement Module and Load- ing/Unloading Module, we need other facilities t o re- verse the direction of the elevator.
,4
solution is t o use the so-called Direction Reversing Module to be devel- oped below.The Direction Reversing Module using control places is presented in Fig. 4, where the places appeared in the figure are explained as follows.
1) reverse-i,
i
E ( I , . .. , l o } , are the control places used t o replace the comparison mod- ule as has been mentioned previously. To- kens in these places are directly assigned by control rules as tickets. Generally, if there are still car calls t o request stops at floors on the way in the elevator, these places should not be assigned tokens. T h e detailed steps of assignment will be explained in the coming section about rules.2) busy and free, are two kinds of control sta- tus proposed for the scheduling system, indi- cating the denial or permission t o allow an el- cwator to reverse its direction at certain floor.
If a token is placed in the place busy, it in- dicates t h a t the elevator is going t o send its passengers t o their destination arid is not al- lowed t o reverse its moving direction up t o this floor. In other words, when the elevator is loaded, it should not reverse its direction until it becomes empty. Whereas if a token
is placed in the place free, it represents that the elevator is empty now and, hence, is per- mitted t o change its moving direction.
3) off_dutj,-i, i E (1,. . .
,
lo}, are the control places needed t o switch from the status busy t o the st,Ltus f T e e . These places are designed for use of controlling the timing of revers- ing the up or down direction of the elevator movement.2.5
A
sinip1.e example
As so far, we have discussed the necessary modules t o complete the Petri net model ofan elevator system. Due t o the complexity of the full elevator model, we
first examine a simple model of a single elevator run ning in a. 3 fl3or building, which is shown in Fig. 5 .
From the figure, it is shown t h a t the model is a combination of three Basic Movement Modules and three Loadin ;/Unloading Modules. For simplicity, the Direction Reversing Module is not drawn in the fig- ure. For a miiltiple elevator system, the final Petri net model can be easily constructed by simply copying the model for t h ? single elevator a numbers of times and aggregating 1 hem together, which sharing all the cor- responding f a l l call places from each single elevator model, whervby the final Petri net model.
However, it is worthwhile t o note t h a t the final Petri net model may not be deadlock-free and no modifica- tion is intended t o avoid the possible deadlock. Be- cause such a model is t o form a base for elevator dy- namic scheduling, the deadlock situation is obviously an unsatisfactory result out of the scheduling. T h a t is, the scheduling system should output a schedule t o prevent the system from getting into deadlock. The architecture and adopted strategies of the scheduling system will he presented in the next section.
3 Dynamic Scheduling
and
Simulation
Once the Petri net model of the elevator system is constructed, we want the evolution of the system t o follow an optimal route. For a general Petri net model, the system status is described by the marking of thc net. Thus, all possible behavior of the system can be completely rlxorded in the reachability graph. There- fore, an optimal schedule can be obtained by gener- ating the rexhability graph and finding an optimal path from t:ie initial marking t o the final marking. Since the pai;h is actually firing sequences of the tran- sitions of the, Petri net model, by applying the sched-
ule back to the Petri net model, the evolution of the system can be accurately simulated. Generally speak- ing, these strategies work quite well when the size of the Petri net is small. The hierarchical view of the above-mentioned elevator scheduling system is shown in Fig. 6.
This architecture is mainly composed of three parts
: a scheduler, a Petri net model, and an emulator. When a, new hall call is registered, the scheduler ob- tains the current status of the Petri net model and resets the control places according to the control rules and perform the scheduling. In other words, sched- uler sets up the initial marking of the Petri net model by aids of control rules, and use the search method to find the suitable schedule. Once the schedule is found, the result is input into the emulator to demonstrate the scheduling result via animation. *4s the emula- tor performs, the firing of transitions in the Petri net model is under the control of emulator according to the scheduling result. Thus, the system is waiting for the next hall/car call reported from the physical system and then the previous process will be reported again. When the size of the Petri net becomes large, the reachability graph will grow rapidly so that the com- puter may fail to be able to generate the whole graph. Instead of generating the entire reachability graph, some heuristic rules must be employed t o generate only the necessary portion of the reachability graph. In this way, a good schedule, optimal or near optimal, can be found in a reasonable amount of time. This is extremely important especially for on-line scheduling such as the one for elevator system.
To combine the rules and Petri net model, we pro- pose a new architecture to achieve our purpose. We use the control places mentioned previously as an in- terface between the rules and the Petri net model. Control places, as implied by their names, affect the possible firing sequences by the appropriate token as- signment. Inevitably, there are conflicts existing in a large, complicated Petri net. Every conflict will con- tribute to the possibly different firing sequences in the Petri net.
If
a model is without any conflict, we can easily determine the best solution by simple calcula- tion. Owing to this fact, it is clear that the solution space of the scheduling problem represented in a Petri net model is decided by the combination of all con- flicts. If we can reduce the occurrences of conflicts, we can reduce the solution space efficiently and reduce the time needed for scheduling. This is one of the impor- tant reasons that we adopt the control places in our architecture.Another reason for us t o adopt them is the flexibil-
ity provided by the control places. To adapt to various traffic conditions and different criteria, we can elabo- rately assign the necessary tokens t o the control places and guide the evolution of the Petri net model to fit our need. In other words, we can put the constraints to the Petri net by means of the control places so that the undesired firing sequence will never be enforced in the reachability graph.
There are some assumptions which must be ad- dressed before we introduce our control rules. These assumptions are listed as follows.
1) The movement of an elevator is always a se- ries of going-up, going-down, and stopping either for waiting or for loading/unloading.
An
example of the trajectory of an elevator is shown in Fig. 7.2 ) Before an elevator serves all car calls, i.e., be-
fore visiting all destinations which are regis- tered by the riding passengers after pressing car buttons, the elevator should not reverse its direction. When an elevator is empty or stopped, it becomes free to turn t o going-up or going-down to respond t o other hall calls. 3) To predict the possible destination of a hall call, we simply assume that a passenger may traverse a third of all floors of a building. This assumption may not be reasonable be- cause we fail to have historic d a t a of the ac- tual traffic pattern of a building. But the more precise prediction system is beyond the scope of this paper.
There are three categories of the control places used in the elevator Petri net model proposed here. They are ticket, reverse, and off-duty. The place tzcket is
used to control the range of possible trajectory of an elevator. The place reverse is used to indicate the time
when the elevator can reverse its direction without vio-
lating our assumption. And, the place off-duty is used
to inform the scheduling system when the elevator will become empty. The rules to assign the tokens t o these control places are described as follows.
Rules t o assign tickets
The strategy t o assign sufficient tickets is t o make every elevator be able t o pass by all hall calls. Then the best assignment is determined by the scheduler. The following are explanations of the terms to be need.
mf indicates the number of total
floors
ina
build- ing.e c
f
indicates t h e current floor at which the elevator stays.0 dest indicates the destination of a moving eleva- tor. If the elevator is stopped, then set dest t o
0 u h indicates the highest floor among floors where up-hall calls are made and which are higher t h a n
dest.
e dh indicates the highest floor among floors where down-hall calls are made and which are higher than dest.
0 ul indicates the lowest floor among floors where up-hall calls are made and which are lower t h a n
dest.
cf.
0 dl indicates the lowest floor among floors of where down-hall calls are made which are lower t h a n
dest.
0 pred(hc) indicates the predicted destination of the
hall call he. If hc is a n up-hall call, pred(hc) will return m a z ( h c
+
f m f , mf). If hc is a down-hall call, p e d ( he) will return min( he -- $mf
,
1).1 ) Set the variable up-dest t o the maximum among p r e d ( u h ) , d h , and dest.
2 ) Set the variable down-dest t o the minimum among pred(dl), ul, and dest
3) Generate all tickets for Basic Movement Module in the up direction from down-dest
t o up-dest and for Basic Movement Module in the down direction from up-dest t o down- dest.
Rules
to
assign
reverse1) Assign tokens t o reverse-1 and reverse-mf
(as shown in Fig. 4).
2) For all floors of down hall calls down-he-i
higher than floor cf and floor dest, assign token t o the place reverse-i.
3) For all floors of u p hall calls up-he-i lower than floor cf and floor dest, assign token t o the place reverse-i.
Rules
to
assign
ofl-dutg1 ) Assign tokens t o place of f-duty-l and
off - d u t y m
f
(as shown in Fig. 4.)2) Assign tokens t o place off -duty-dest.
Rules
to
avoid bunching
To
avoid t i e bunching phenomenon in the example with four elerators in a group, t h e following rules are added.1)
If
there are three elevator cars which are moving upwards, t h e remaining elevator car should st ay in lower floors and ignore the hall calls from tlhe high floors temporarily.2) If there zre three elevator cars which are mov- ing dow iwards, the remaining elevator car should stay in higher floors a n d ignore the hall calk from t h e low floors temporarily. Besides tl-os€ rules mentioned above, we can add some particular rules for specific situation. For exam- ple, in the p2riod of incoming traffic, we can reserve one elevator rar t o serve for t h e sparse interfloor traffic and t h e let the rlemaining elevator cars mainly respond t o the large amount of service requests a t the lobby floors, but s l i p the other hall calls t o directly return t o the lobby floor when any of them becomes empty. There are m m y similar rules which should be added t o the r u l e b x e t o achieve better performance. How- ever, the expansion of rulebase, even the possibility of evolving into an expert system, is beyond the scope of the current research. Among state-search algorithms,
A*
search is it best-first heuristic shortest-path-finding algorithm. TJsingA*
search here in this paper, opti- mization can generally be ensured t o some extent by using a n appropriate cost function. T h e basic heuristic search procedure together with some useful properties will be descr bed as follows.For e x a m d e , we want t o search for a path from a start node s t o a node g within a set of goal nodes
J?
ovex a graph G, which represents the search space, of thz problem. Let the sequence of nodes (s, n 1 , 7 a 2 ,. .
.,
g) constitute a solution path. An evalu- ation function assigns a value t o each node n inG
representing a heuristic estimate for the length of the optimal s o l u i o n path constrained t o contain node nwhich is expressed in the following form:
f ( n )
= dn)+
h ( n )where g(n) 2 the cost from the root node s t o node n ,
and h ( n ) is ,i heuristic estimate of the distance from node n t o goal.
It has b e m :shown t h a t
A*
algorithm is completewhich means t h a t the algorithm terminates with a so- lution if one exists. Also, h(m) is said t o be admzssrble
is the actual minimal cost from
m
t o the goal. An al- gorithm is said to be admissible if it is guaranteed to return an optimal solution whenever a solution exists. In practice, we can hardly guarantee that h never overestimate h* for most of the real problems. ‘4n ex- ception is to set h nearly t o zero. But this will make the A* algorithm much more inefficient. So, there ex-ists a useful corollary which is worthy to mention: Corollary: Graceful Decay of Admissibility If h rarely overestimates h’ by more that
6.
then theA* algorithm will rarely find a solution whose cost is more than S greater than the cost of the optimal solu- tion.
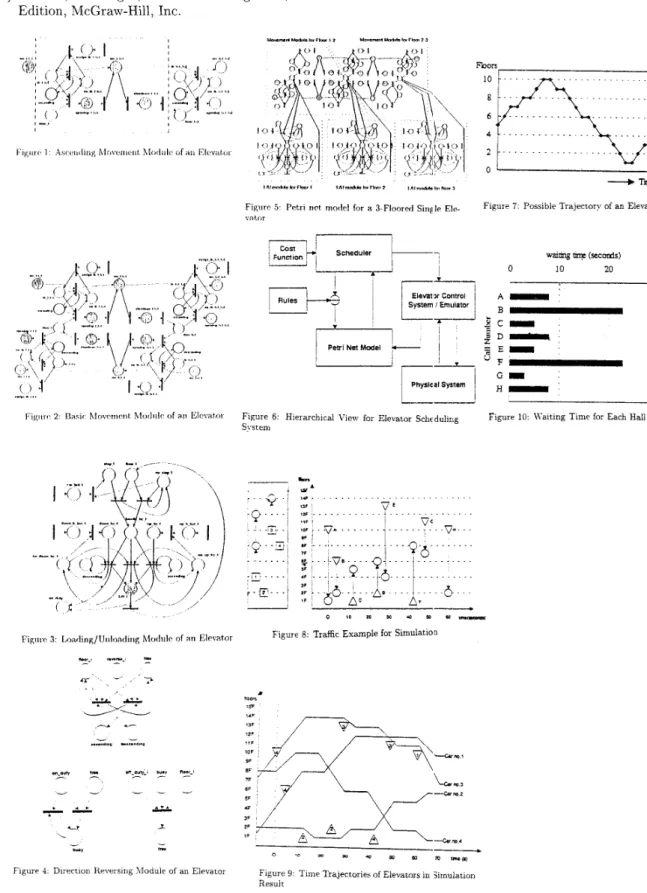
In this paper, we use an example of a 15-floor build- ing with four elevators in a group model to demon- strate the performance of proposed scheduling system. Consider the case shown in Fig. 8. In the left part of Fig. 8, the square boxes stand for the elevator cars and the circles stand for the car calls. As shown in the figure, elevator car no. 2 and 4 are stand-by on the second floor and the eighth floor, respectively, at the beginning of simulation. Elevator car no. 1 and 3 are ascending to their destination, and their current loca- tion is on the fourth floor and tenth floor, respectively, when the simulation starts. In the right part of Fig. 8, there are eight hall calls which will be progressively registered as shown in Fig. 8 within one minute from now. The upright triangles stand for the up-hall calls, the downright triangles stand for the down-hall calls, and the circles here stand for the destinations of those hall calls. These hall calls take place in time sequen- tially. The resulting time trajectories of the elevator cars in the simulation result responding to input hall calls are shown is Fig. 9.
The waiting time for each hall call is shown in Fig. 10. The average waiting time is about 10.4 sec- onds. This should be an acceptable value in a general elevator system for high-rise building.
4
Conclusion
In this paper, we proposed a systematic Petri net based modeling of an elevator group supervisory con- trol system. The entire model is composed of a number of modules which can be classified into three types :
Basic Movement Module, Loading/Unloading Module, and Direction Reversing Module. In these’ modules, control places plus a set of rules are utilized to reduce the complexity of the Petri net model. The utiliza- tion of rules on the top of a T P P N model allows the modeling t o be more accurate and much simpler. The rules are used not only t o set up the initial marking
of the Petri net but also t o assign tokens, and hence the model still retain its properties and will evolve ac- cording t o the original firing rules.
To obtain a schedule based on the proposed Petri net model. a heuristic search algorithm is applied. Due t o the NP-complete complexity and the requirement of on-line scheduling, the control places again are used to control the transitions to be or not t o be enabled according to some constraints. By this method, some inadequate firing sequences will not be generated and the search space is efficiently reduced.
To demonstrate the effectiveness of the proposed scheduling system, an experiment on a 15-floor build- ing with four elevators were conducted and satisfactory results have been observed.
References
[l] C. A . Petri, “Kommunikation mit Automaten,” Ph.
D.
thesis, University of Bonn, Germany, 1962.[ 2 ] T . Murata, “Petri Nets : Properties, Analysis and Applications,” Proc. IEEE, vol. PORC-77, no. 4, pp. 541-580, Apr. 1989.
[3] R. K. Guha,
S.
D. Lang, M. Bassiouni, “Soft- ware Specification and Design Using Petri Nets”,Proc. of Fourth International Workshop on
Soft-
ware Specificatzon and Design, 1987, pp. 225-230. [4] F.S.
Etessami,G.
S.
Hura, “Rule-Based De- sign Methodology for Solving Control Problems”,IEEE Trans. on Software Engineering, vol. 17, no.
3 , 1991, pp. 274-282
[5] N. Kameli, K. Thangavelu, “Intelligent Elevator Dispatching System”, A I Expert, September 1989, pp. 32-37.
[6] H. Aoki, K . Sasaki, “Group Supervisory Control System Assisted by Artificial Intelligence”, Eleva- tor World, February 1990, pp. 70-80.
[7] S. Tsuji, M. Amano, S. Hikita, “Applica-
tion of the Expert System to Elevator Group-
Supervisory Control”, IEEE 5th Conf. of Aritifi-
cal Intelligence Applications, 1989, pp. 288-294 [8] T. Tobita, H. Inaba, K . Yoneda and T. Ueshima,
“An Elevator Characterized Group Superviosry Control System”, IEEE IECON’Sl, pp. 1972- 1976
[91 E. Rich, K. Knight, “Artificial Intelligence”, 2nd Edition, McGraw-Hill, Inc.
,A.
.-
-
-..-*mr
...
Figure 6 : Hierarchical Viea. for
System S&duiirIg
Figure 10: Waiting Time for Each Hall Call
o 7 0 zc ac e ID w ,--
Figure 8: Traffic Example for Simulation