可動態規劃之軟體系統研究
75
0
0
全文
(2) 可動態規劃之軟體系統研究 A Study of Dynamically Reconfigurable Software Systems. 研 究 生:李岳峰 指導教授:張瑞川. Student:Yueh-Feng Lee 博士. Advisor:Dr. Ruei-Chuan Chang. 國 立 交 通 大 學 資 訊 科 學 系 博 士 論 文 A Thesis Submitted to Department of Computer and Information Science College of Electrical Engineering and Computer Science National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Computer and Information Science June 2005 Hsinchu, Taiwan, Republic of China. 中華民國九十四年六月.
(3) 可動態規劃之軟體系統研究 研究生: 李岳峰. 指導教授: 張瑞川 博士. 國立交通大學資訊科學研究所. 摘要 現今有愈來愈多的軟體系統都設計為可升級,他們並不需要經由重新安裝便可 獲得新功能以及錯誤修正。然而,大多數的可升級軟體都無法動態升級,即在不 中斷任何執行中服務的狀態下進行升級。可使軟體動態升級的功能稱之為動態規 劃,動態規劃至今仍不是常見的軟體功能,因其必須仰賴特別的系統服務,要建 置這些系統服務往往需要對軟體進行大幅度的修改。 本論文對於兩種傳統上不可動態規劃的系統加入動態規劃的功能。第一,我們 為通訊協定堆疊提供一個以Java為基礎的元件框架,只要依照元件框架所訂定的 設計規則,程式設計者即可設計出可動態規劃的通訊協定元件。在此元件框架 下,我們亦設計了一個可在傳輸中進行升級的TCP元件。 第二,雖然以元件為基礎的程式設計已成為廣泛使用的軟體再利用方法,目前 所有的元件框架皆不支援動態規劃,因此我們提出一個一般用途且支援動態規劃 的元件框架,其亦以Java為基礎,但可支援各種軟體升級的形式,包括相當複雜 的升級形式例如多重升級,而系統的效能也藉由JNI和JVMDI使用而大幅提升。. i.
(4) A Study of Dynamically Reconfigurable Software Systems Student: Yueh-Feng Lee Advisor: Dr. Ruei-Chuan Chang. Department of Computer and Information Science National Chiao Tung University. Abstract. More and more software systems are designed to be upgradeable. New functionalities and bug fixes can be introduced to these systems without reinstalling the software. However, very few of them can be upgraded dynamically, that is, the system can be upgraded without interrupting any running services. The software feature that makes a system dynamically upgradeable is called dynamic reconfiguration. Dynamic reconfiguration is still not widely deployed because it needs special system services and such services cannot be realized in current software systems with only a few modifications. This thesis incorporates dynamic reconfiguration into two types of systems that are not traditionally dynamic-reconfigurable: protocol stacks, and component frameworks. For protocol stacks, we propose a component-based protocol framework written in Java. Following the programming rules specified by the component framework, the programmers are able to develop dynamically reconfigurable protocol modules. Under this framework, we developed a TCP component that can be upgraded when the TCP protocol is still in transmission. Although component-based programming is a widespread software development technique,. ii.
(5) none of the existing component frameworks are dynamically reconfigurable. Therefore, we propose a general-purpose, dynamically reconfigurable component framework for software components. The component framework is also based on Java, but it supports various types of component updates, including rather complicated ones such as multiple update, and the performance is improved considerably by using the Java Native Interfaces (JNI) and Java Virtual Machine Debugging Interface (JVMDI).. iii.
(6) Acknowledgements This thesis would not have been possible without the help of many people. I would like to thank my advisor, Ruei-Chuan Chang, for his guidance, advice, and patience over the last six years. I must also thank my committee for their invaluable comments. Working in the Computer Systems Laboratory has been a wonderful experience. I would like to thank my friends at the Computer Systems Laboratory, especially Da-Wei Chang, for providing valuable suggestions during the writing of the dissertation. Finally, I would like to thank my parents for their continued love, support, and encouragement.. iv.
(7) Table of Contents Abstract ..................................................................................................................................... ii Acknowledgements .................................................................................................................. iv List of Tables ......................................................................................................................... viii List of Figures .......................................................................................................................... ix 1.. Introduction....................................................................................................................1 1.1.. A Dynamically Reconfigurable Protocol Framework using Java..........................5. 1.2.. A Java-based, General-purpose Component Framework for Dynamic. Reconfiguration ...................................................................................................................7 1.3. 2.. Related Work ...............................................................................................................11 2.1.. Dynamic Reconfiguration in General ..................................................................11. 2.2.. Dynamic Reconfiguration and Protocol Architectures ........................................12. 2.3.. Dynamic Reconfiguration and Operating System Kernels ..................................13. 2.4.. Techniques for Preserving the Safe Reconfiguration Point .................................14. 2.5.. Programming Tools..............................................................................................16. 2.6. 3. Thesis Outline ......................................................................................................10. 2.5.1. Object Persistence and Reflection............................................................16. 2.5.2. JNI and JVMDI ........................................................................................16. Summary ..............................................................................................................17. A Dynamically Reconfigurable Protocol Framework using Java .....................................18 3.1. 3.2. 3.3. Architectural Overview........................................................................................18 3.1.1. Framework Architecture ..........................................................................18. 3.1.2. Dynamic Reconfiguration Procedure.......................................................20. Component Programming ....................................................................................21 3.2.1. Component Definition and Component Communication ........................21. 3.2.2. External Interfaces ...................................................................................22. 3.2.3. Component Execution Model ..................................................................23. 3.2.4. Component States ....................................................................................23. 3.2.5. User-defined Handlers .............................................................................24. 3.2.6. A Protocol Component Example .............................................................25. Implementation of the Component Framework ...................................................26. v.
(8) 3.3.1. Safe Reconfiguration Point ......................................................................26. 3.3.2. Support Libraries......................................................................................26. 3.3.3. Implementation of Reconfiguration Operations ......................................27. 3.3.4. Implementation of External Interfaces.....................................................29. 3.4. Dynamic Reconfiguration of TCP .......................................................................30 3.4.1. Structure of TCP Implementation ............................................................30. 3.4.2. Experimental Environment ......................................................................31. 3.4.3. Dynamic Reconfiguration of the TCP Component..................................33. 3.4.4. Implementation of User-defined Handler ................................................33. 3.4.5. Performance of TCP Reconfiguration......................................................34. 3.5 4.. Summary ..............................................................................................................35 A Java-based, General-purpose Component Framework for Dynamic Reconfiguration 37. 4.1. Component Framework Overview.......................................................................37. 4.2. Component Model....................................................................................37. 4.1.2. Compatible Changes and User-defined Handler......................................38. 4.1.3. Programming Rules for the User Application..........................................40. 4.1.4. Limitations of the Component Model ......................................................41. Implementation of the Component Framework ...................................................41. 4.3. 4.2.1. Preloading Technique ..............................................................................42. 4.2.2. Safe Reconfiguration Point in Native Programming Approach...............42. 4.2.3. State Transfer of the Native Programming Approach .............................44. 4.2.4. Replace Operation in Native Programming Approach ............................44. 4.2.5. Implementation of External Method Redefinition and Multiple Update.45. A Dynamically Reconfigurable TCP and Performance Evaluation.....................47. 4.4 5.. 4.1.1. 4.3.1. Performance of Normal Execution...........................................................47. 4.3.2. Performance of the Replace Operation ....................................................48. Summary ..............................................................................................................51 Conclusions and Future Work......................................................................................53. 5.1.. 5.2. Summary ..............................................................................................................53 5.1.1. Protocol Reconfiguration .........................................................................53. 5.1.2. Component Framework............................................................................54. Future Work .........................................................................................................55. vi.
(9) 5.2.1. Dynamic Reconfiguration of Linux Protocols .........................................55. 5.2.2. Enhancing the Component Framework....................................................57. 5.2.3. Integrating Transactional Rollback and Dynamic Reconfiguration ........58. Bibliography.............................................................................................................................59 Vita...........................................................................................................................................64. vii.
(10) List of Tables Table 3-1: Performance of replacing the TCP component.......................................................36 Table 3-2: The maximum processing time of the TCP component.........................................36 Table 4-1: Performance of normal execution...........................................................................48 Table 4-2: The fields defined in the TCP1 and PCB classes...................................................51 Table 4-3: Effect of the preloading technique..........................................................................51. viii.
(11) List of Figures Figure 1-1: Dynamic reconfiguration of the module B..............................................................3 Figure 1-2: Indirect swap and direct swap.................................................................................4 Figure 3-1: Architecture of the component framework............................................................20 Figure 3-2: Dynamic reconfiguration in the component framework.......................................21 Figure 3-3: Service interfaces defined by the component framework.....................................23 Figure 3-4: A protocol component example.............................................................................26 Figure 3-5: External interfaces of the component framework.................................................30 Figure 3-6: Structure of the TCP implementation....................................................................32 Figure 3-7: Experimental environment....................................................................................33 Figure 4-1: A general component example..............................................................................39 Figure 4-2: User-defined handler.............................................................................................41 Figure 4-3: Reference duplication and reference redirection steps of a multiple update.........47 Figure 4-4: Overall performance of serialization and native programming approaches..........49 Figure 4-5: The detailed performance of serialization and native programming approaches..50. ix.
(12) 1. Introduction Software upgradeability is already a popular feature of contemporary software systems. Instead of reinstalling the entire software, a software system can improve its functionality or correct software faults by installing small pieces of software called software patches. Software upgradeability emerges because of several reasons. First, software usually evolves. Programmers have to continuously develop new features to satisfy their users’ need. Second, large software system are very complicated and error-prone. When software complexity grows, software faults are more likely to happen so they should be fixed in an efficient way. Finally, software upgradeability reduces the system administration cost because there is no need to reinstall the software. Although a number of current software systems are upgradeable, very few of them are dynamically upgradeable, that is, upgrading without restarting the system so that all the running services are not affected or terminated. Dynamic upgradeability is also referred to as dynamic software updating (Hicks et al. 2001), online software upgrading (Segal 2002), or unanticipated software evolution (Kniesel et al. 2002). The process of dynamically upgrading a software system is called dynamic reconfiguration (Kramer and Magee 1985). A most fundamental requirement of dynamic reconfiguration is modularization, for which the system subdivides its functionalities into a number of modules and compiles them into separate binaries. When the software system is modularized, dynamic reconfiguration can modify only part of the system rather than the whole system. The programming interface of dynamic reconfiguration is usually provided as a set of reconfiguration operations. The two most basic operations are create and remove. The former adds a new module instance to the system and the latter removes an existing module instance from the system. The most important and powerful operation is replace, which not only. 1.
(13) replaces an existing module instance with a new one in a different format but also preserves the state stored in the old module instance. Note that the process of performing the replace operation is also called hotswapping (Dmitriev 2001; Soules et al. 2003). The implementation of the replace operation is challenging because it has to fulfill two other requirements: state transfer mechanism and external reference management. State transfer mechanism: When a module is replaced, the new module should not start from the beginning. Instead, the new module must behave as if the old module continues its execution, so the data stored in the old module must be transferred to the new module. These data are referred to as module state. The mechanism that transfers the module state from the old module to the new module is called state transfer mechanism. A dynamically reconfigurable system must implement at least one state transfer mechanism, and the module state must be defined before state transfer. External reference management: The replace operation has to correctly manage module’s external references. For instance, when module A is used by module B, B is module A’s external reference. Similarly, module B may also be an external reference of module A. After dynamic reconfiguration, the system must ensure that the new module is accessible by its external references and that the new module can still access the modules to which the old module used. The final requirement of dynamic reconfiguration is safe reconfiguration point, a period in which the system can be safely modified. The system must preserve the safe reconfiguration point before performing any reconfiguration operations. Safe reconfiguration point is necessary because a module may be concurrently accessed by several executable entities, such as a number of threads. If the system is not reconfigured at the safe point, race conditions would take place and inconsistent results would be produced. Generally, the implementation of the replace operation involves four steps: module. 2.
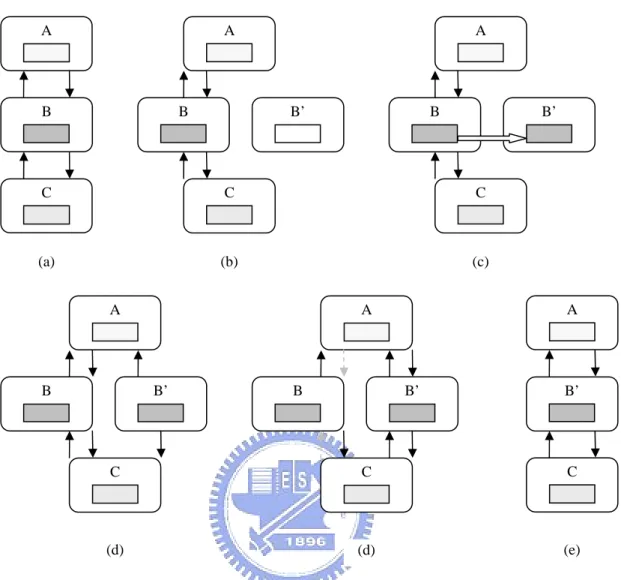
(14) A. A. B. B. A. B’. B. B’. C. C. C. (a). (b). (c). A. A. A. B. B’. B. B’. B’. C. C. C. (d). (d). (e). Figure 1-1: Dynamic reconfiguration of the module B.. creation, state transfer, external reference management, and module removal, as shown in Fig. 1-1. Suppose that a system consists of three modules: A, B, and C (Fig. 1-1a). B is the module to be replaced and we assume that the system has already reached the safe reconfiguration point. First, the module B’, the new version of B, is created in the system (Fig. 1-1b). The state of B is then transferred to B’ (Fig. 1-1c). Next, B’ refers to the modules that B originally refers to (Fig. 1-1d). Then, the modules that originally refer to B are directed to B’ (Fig. 1-1e). Finally, B is removed from the system and the dynamic reconfiguration process is complete (Fig. 1-1f). In addition to the three reconfiguration operations, a system can also be dynamically reconfigured in other ways. For example, interposition (Soules et al. 2003) modifies the. 3.
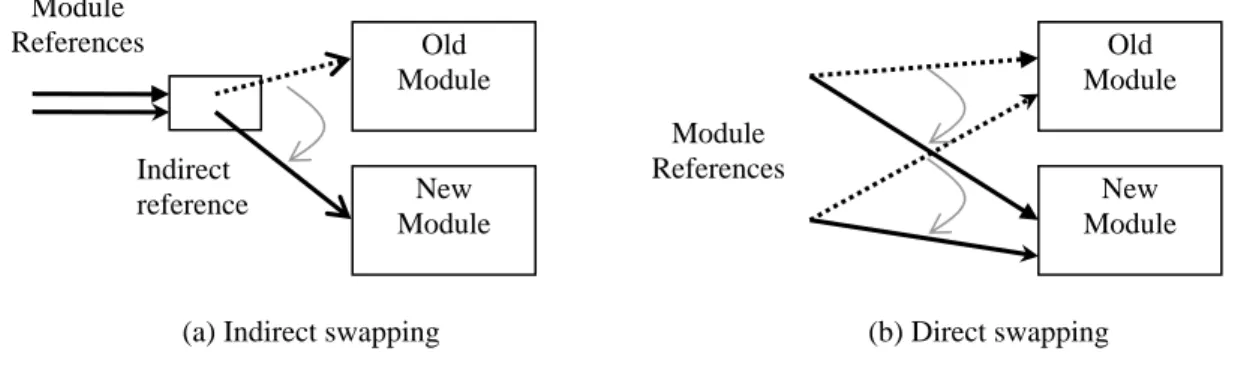
(15) Module References. Old Module. Indirect reference. Old Module Module References. New Module. (a) Indirect swapping. New Module. (b) Direct swapping. Figure 1-2: Indirect swapping and direct swapping.. module behavior by attaching code that is executed before or after the original code. Since the original code is not changed, interposition is not as powerful as the replace operation because it cannot fix software faults inside the original code. Therefore, interposition is not discussed in the rest of this paper. The external references mentioned earlier can be managed in two ways: indirect swapping and direct swapping (Fig. 1-2). Indirect swapping associates a module with an indirect reference. A module can be replaced by switching only the indirect reference instead of changing all the module references. Indirect swapping is simple but the indirection layer will introduce additional runtime overheads. In contrast, there is no additional layer between the module and module references in direct swapping, so during swapping each module reference must be changed. Although the direct approach is more complex, it is suitable for performance-sensitive systems since there is no additional runtime overhead. Although dynamic reconfiguration is an attractive feature, it is still not widely deployed because existing software systems cannot satisfy the requirements described above with only a few modifications. This thesis aims to incorporate dynamic reconfiguration into software systems that are not traditionally dynamically reconfigurable. The contribution of this thesis is twofold. First, we develop a protocol framework that fully supports dynamic reconfiguration; none of the existing protocol frameworks provide such a feature. Second, we. 4.
(16) develop a general-purpose component framework that supports dynamic reconfiguration. All of the current component frameworks are not dynamically reconfigurable, and our component framework supports rather complicated update types, such as a multiple update. The remainders of this chapter briefly introduce these two systems and their motivations.. 1.1. A Dynamically Reconfigurable Protocol Framework using Java Communication protocol specifications are evolving, which usually generates a series of versions based on similar hardware requirements. For example, GSM 04.08 specification (ETSI 1998) has more than ten versions and each version differs only in certain message formats or control flows. Because some protocol specifications are complicated, incremental implementation is often used to deploy protocols as early as possible. In addition, protocols, implemented as software, can be affected by programming faults. As a result, a communication device needs protocol upgrading to extend its lifetime and functionality. Dynamic protocol architecture is a fundamental solution to protocol upgrading. It splits a protocol stack into a number of protocol modules and allows a protocol stack to be composed of different modules during runtime (Plagemann and Plattner 1993; Ritchie 1984; Schmidt et al. 1993; Zitterbart et al. 1993). However, when a new architecture is deployed, the existing protocol connections will be lost. For example, if the new architecture consists of a new TCP module that replaces the old one, the old TCP module is terminated and then the new module is started from the beginning. Thus, the connections held by the old module cannot survive in the new module. Moreover, the applications running on top of the protocol stack would lose TCP connections. The above situation is especially unfavorable in long-running servers since they usually have long and important TCP connections.. 5.
(17) In order to implement dynamic reconfigurable protocol stacks, the system has to satisfy the requirements as described earlier. Unfortunately, no protocol subsystem can fulfill all of the requirements with a few modifications. For example, the Linux TCP/IP implementation cannot be decoupled from the kernel image. Also, its TCP and IP implementations cannot be separated clearly. Although the TCP/IP implementations based on the STREAMS (Ritchie 1984) subsystem have separate TCP and IP modules and a STREAMS module does not have to manage external references because module communication is based on message passing rather than function invocation, safe reconfiguration point and state transfer mechanism are still not supported by the STREAMS subsystem. Moreover, a protocol implementation based on message passing is more difficult to program due to the message encoding and decoding processes. Therefore, we propose a protocol framework1 to demonstrate an ideal network subsystem supporting all the requirements of dynamic reconfiguration. The protocol framework is also a component framework, which specifies a set of programming rules for programmers to develop highly reusable components. The most important feature is that the components written for the component framework are dynamically reconfigurable. The component framework supports create, remove, and replace operations for protocol components. The first two operations are similar to the insmod and rmmod utilities of the Linux module system or the push and pop operations of the STREAMS subsystem. The component framework is novel in that it supports the replace operation, which can replace a running component without losing the component state and breaking the integrity of the protocol stack. The component framework is completely written in Java, based on JDK 1.4.0. The component framework is Java-based because of its powerful language and library features. The component framework is able to connect to Linux network drivers so that it can transmit 1. The source code of the component framework is available at http://www.cis.nctu.edu.tw/~gis88802. 6.
(18) and receive data as in-kernel protocol stacks do. In addition, we have implemented a TCP component under the framework. The TCP component can be reconfigured while it is running. The experiment shows that the replacement of the TCP component roughly adds a delay of 200 ms.. 1.2. A Java-based, General-purpose Component Framework for Dynamic Reconfiguration In the previous section, we have introduced a dynamically reconfigurable environment for protocol stacks, which is a specialized application. In this section, the component framework is extended so that it can be used by general-purpose applications. Many general-purpose, dynamic-reconfigurable systems are developed as a programming language feature (Costanza 2001; Dmitriev 2001; Hicks et al. 2001; Hjalmtysson and Gray. 1998; Malabarba et al. 2000; Orso et al. 2002). A programming language with its runtime system is dynamically reconfigurable if the types used in a program can be redefined during runtime. Dynamic reconfiguration has been implemented on several programming languages, including C++ (Hjalmtysson and Gray. 1998), Java (Costanza 2001; Dmitriev 2001; Malabarba et al. 2000; Orso et al. 2002), and an assembly language with types (Hicks et al. 2001). A dynamically reconfigurable programming environment should be able to perform several kinds of dynamic changes. For Java, The most fundamental kind of change is method reimplementation, in which a method is reimplemented but its arguments and return type are not changed. A more advanced one is method redefinition, which changes not only the method implementation but also the arguments and the return type of a method. Method. 7.
(19) redefinitions can be further classified as external or internal. An external method redefinition changes the methods that are invoked by other classes. In contrast, an internal method redefinition changes only the methods that are invoked inside the class. Another one is field redefinition, such as to add a field, to remove a field, or to modify the type of a field. In addition, several classes can be changed simultaneously, which results in a multiple update. A multiple update is not equivalent to a series of single updates. A single update cannot handle external method redefinition because both the changed class and the classes that invoke the changed one must be updated at the same time. Currently dynamically reconfigurable systems do not handle all of them very well. For example, the HotSpot Java virtual machine (Dmitriev 2001) does not permit method redefinition and field redefinition. Although method redefinition is permitted in the work by Orso (Orso et al. 2002), the object states cannot be transferred correctly. In addition to various kinds of change, dynamic reconfiguration can also be implemented for high-level programming languages in several ways: syntax-based, runtime-dependent, and runtime-independent. The syntax-based approach modifies both the language syntax and the corresponding runtime system (Costanza 2001). The dynamic reconfiguration interface is provided as special language syntax. The runtime system-dependent approach does not alternate the language syntax but modifies the language runtime system, and the reconfiguration interface is provided as a library (Dmitriev 2001; Malabarba et al. 2000). The runtime system-independent approach neither modifies the language syntax nor modifies the language runtime system (Hjalmtysson and Gray. 1998; Orso et al. 2002), and there are two kinds of such systems. The first (Hjalmtysson and Gray. 1998) provides a dynamic reconfiguration library written in the same language and specifies a set of programming rules for programmers to develop software modules. The second (Orso et al. 2002) uses a proxy mechanism to transform the code into a format that enables dynamic reconfiguration.. 8.
(20) Each approach described above has both advantages and disadvantages. When using the syntax-based approach, the users have to install a language development environment that is capable of dynamic reconfiguration. Although the runtime system-dependent approach does not need a new language development environment, the users still have to install a modified language runtime system if the runtime system and applications are separated. For example, Java language users have to install a modified Java virtual machine. These two approaches are not suitable for multi-user environments because the users may not be able to install language development environments or language runtime systems. The runtime system-independent approach also has some drawbacks. For systems that specify special programming rules, these rules may make software development more difficult. For systems that use proxy and code transformation, it has been reported that some language features may not operate correctly after transformation (Orso et al. 2002). Our goal is to provide a dynamic reconfiguration system for Java. The system has the following design goals. First, we exploit the features of the Java language and the virtual machine instead of modifying them. Second, dynamic reconfiguration should be transparent to the software modules as much as possible. Next, the system should support all kinds of dynamic changes that usually take place. Finally, the implementation technique should minimize both the runtime and reconfiguration overheads. Therefore, the proposed system adopts the component-based solution. We provide a component framework to programmers. Following programming rules specified by the component framework, the programmer can write reusable components and use them to compose applications. Most importantly, the components can be changed at runtime by several reconfiguration operations as described earlier. This component-based solution has several advantages. First, the component framework can be used with most of the Java virtual machines, and it is compatible with most virtual machine dependent features, including Java. 9.
(21) reflection and Java native interface (JNI) (Liang 1999). Second, when designing components, the programmer does not have to write code to transfer component state or to preserve a safe reconfiguration point. Next, most of the usually encountered changes are supported by the component framework, these includes method reimplementation, external and internal method redefinition, field redefinition, and multiple update. Finally, the normal execution and reconfiguration overheads are effectively reduced by utilizing the Java Native Interface and Java Virtual Machine Debugging Interface (JVMDI) (Sun Microsystems 2002). The component framework has two implementations. The first focuses on portability and the second focuses on performance. Although both implementations do not modify the Java virtual machine, that is, they are runtime-system independent, the second implementation is not platform-independent because part of it is written in C. This part is compiled into a library that can be loaded by the Java virtual machine.. 1.3. Thesis Outline The remainder of the thesis is organized as follows. Chapter 2 introduces related work. Chapter 3 to Chapter 5 describes each of the proposed systems in turn. Chapter 3 presents the Java-based protocol reconfiguration framework. Chapter 4 presents a general-purpose component framework that supports dynamic reconfiguration. Finally, in Chapter 5, the conclusions and future work are given.. 10.
(22) 2. Related Work In this chapter, we review the work related to the proposed systems. Section 2.1 introduces the traditional but the most active research areas of dynamic reconfiguration, including distributed systems, object-oriented programming languages, and non-object oriented programming languages. Dynamic reconfiguration can also be implemented for protocol architectures and operating system kernels. Section 2.2 and Section 2.3 describe the relationships between dynamic reconfiguration and these two areas, respectively. Section 2.4 describes several techniques to preserve the safe reconfiguration point. When developing a dynamically reconfigurable system, some programming tools can effectively reduce the programming efforts. Section 2.5 introduces the programming tools used in the proposed systems, including object persistence, reflection, JNI, and JVMDI.. 2.1. Dynamic Reconfiguration in General A system is dynamically reconfigurable if its configuration can be changed while it is running. Dynamic reconfiguration was originally implemented in distributed programming languages (Bloom 1983; Kramer and Magee 1985) and has been studied throughout two decades. Hotswapping is a more powerful type of dynamic reconfiguration, and it is equivalent to the replace reconfiguration operation as described earlier. Both hotswapping and the replace operation mean that the module states must be preserved after reconfiguration. Dynamic reconfiguration is also prevalent in object-oriented programming language communities, including CLOS (Keene 1989), C++ (Hjalmtysson and Gray. 1998), Java (Dmitriev 2001; Malabarba et al. 2000), and a Java-based language (Costanza 2001). All the. 11.
(23) works mentioned allow a new class to replace an instantiated class during runtime. In recent years, dynamic reconfiguration is also supported in CORBA (Almeida 2001), which is a distributed object-oriented environment. Dynamic reconfiguration can also be implemented for non-object oriented programming languages. Hicks et al (Hicks et al. 2001) use the Typed Assembly Language (TAL) (Morrisett et al. 1999) and the dynamic linking feature of the ELF format (Lu 1995) to implement general-purpose, dynamically reconfigurable applications. However, this approach cannot be directly used by operating system kernels because most kernels do not have a built-in dynamic linker and Levine (Levine 2000) indicated that dynamic linking suffers from performance penalty.. 2.2. Dynamic Reconfiguration and Protocol Architectures Dynamic protocol architectures (Plagemann and Plattner 1993; Ritchie 1984; Schmidt et al. 1993; Zitterbart et al. 1993) allow a protocol stack to be composed with different protocol modules during runtime. Some properties of dynamic protocol architectures are also present in dynamic-reconfigurable protocol stacks, such as to dynamically create or remove protocol modules. For example, although the STREAMS system can dynamically create and remove modules, the STREAMS system is not fully dynamic-reconfigurable since it does not provide an operation to replace protocol modules. If the programmer wishes to produce results similar to that produced by the replace operation, the programmer has to write proprietary code to deal with state transfer and safe reconfiguration point. When developing a protocol subsystem, the programmer has to consider the programming model to be supported. Several programming models have been proposed and generally each. 12.
(24) can be classified as either an active approach or a passive approach. An active approach binds a module with an executable entity such as a process or a thread whereas a passive approach does not bind a module with an executable entity, so the modules are invoked only by the executable entities that are initiated by others. The most straightforward model is to implement each layer of a protocol stack as a process of the underlying operating system. This is an active approach. Layers can exchange messages using interprocess communication facilities provided by the operating system. This approach is used only by some embedded communication devices such as mobile phones, since it suffers from context switching overheads. A more efficient model is upcalls and downcalls (Clark 1985), in which the whole protocol stack is implemented in the same address space and each layer implements a set of inter-layer communication functions that can be invoked by other layers. The context switching overheads are therefore eliminated. This is a passive approach and is usually adopted by the protocol implementations of operating system kernels such as the TCP/IP implementation of the Linux kernel. In object-oriented programming languages, upcalls and downcalls can be further modeled as a passive object (Ananthaswamy 1995; Krupczak et al. 1998). The benefit of passive objects is that all the functions implemented by a layer can be encapsulated into a single class and this approach is also adopted by our component framework.. 2.3. Dynamic Reconfiguration and Operating System Kernels Extensible kernels are also closely related to dynamic reconfiguration. Kernel extensions can be added to an extensible kernel during runtime, just as modules can be dynamically installed into a dynamic reconfigurable system. Well-known extensible kernels are SPIN. 13.
(25) (Bershad et al. 1995), Exokernel (Engler et al. 1995), and VINO (Seltzer et al. 1994). The Linux kernel is also extensible due to the use of modules, but only part of the kernel services are implemented as modules. An extensible kernel is said to be dynamic reconfigurable if a running kernel extension can be replaced by another kernel extension. Senart et al (Senert et al. 2002) use the THINK component framework (Fassino et al. 2002) to build a dynamically reconfigurable kernel, although they do not provide detailed status. K42 (Soules et al. 2003) is an object-oriented operating system kernel that can be dynamically reconfigured using interposition and indirect swapping. Transaction processing systems (Gray and Reuter 1993), usually built on top of the operating systems, can also make hotswapping easier. Software modules can be hotswapped in transaction processing systems in two ways. In the first approach, the system blocks incoming transactions, keeps track of the ongoing transactions, rollbacks the ongoing transactions, hotswaps software modules, redoes the transactions, and then processes incoming transactions. In the second approach, the system blocks incoming transactions, waits until all the ongoing transactions finish, hotswaps software modules, and then processes new transactions. However, since most operating system kernels do not support transaction processing, the transaction-based kernel hotswapping is not easy to achieve.. 2.4. Techniques for Preserving the Safe Reconfiguration Point All the dynamically reconfigurable systems must be able to preserve the safe reconfiguration point, which guarantees the system can be safely changed, and several programming models have been proposed. Kramer and Magee (Kramer and Magee 1990) proposed a model called quiescent state. This model defines the passive and the active. 14.
(26) module states. When receiving the passive signal, a module has to enter the passive state and in this state it cannot perform any action. In other words, the module blocks itself. A system is in quiescent state when all the reconfiguration related modules are in the passive state, so the system can be safely changed. Our component framework differs from their model because it determines the safe reconfiguration point by detecting the component behavior rather than interacting with the component. Although the programmer has to write code to handle the passive signal sent by the system, the quiescent state model is suitable for systems in which the components are too busy to find the safe reconfiguration point. On the other hand, our system does not impose any synchronization burden to the programmer, but a component should guarantee that each component invocation can be served in a relatively short time. A system that does not need a synchronization protocol can determine the safe reconfiguration point in several ways. Some system uses the reference counting technique (Orso et al. 2002) that allows a reconfiguration to take place only when the reference counter is zero. Our component framework uses a simple locking mechanism to guarantee that a component can be exclusively accessed by the component framework. Some system uses the stack inspection technique to determine the safe reconfiguration point (Dmitriev 2001). In this model the system is able to inspect the stack of each thread in the system. A reconfiguration can start when the code of the module to be replaced is not in the stack of any thread. The stack inspection technique is also used by our general-purpose component framework.. 15.
(27) 2.5. Programming Tools 2.5.1 Object Persistence and Reflection Object persistence is the ability to store objects in the secondary storage and to reconstruct them from it. The object persistence scheme provided by the Java environment is called Java serialization (Sun Microsystems 2001), which provides ObjectOutputStream and ObjectInputStream classes to store objects to and retrieve objects from the storage. In our component framework, the Java serialization is used in the serialization and deserialization steps of the replace operation. Reflection provides computational systems the capability to “reason about and act upon itself” (Maes 1987) and there are two models of reflection: computational reflection and structural reflection (Ferber 1989). The reflection capability provided by the Java environment is called Java reflection (Sun Microsystems 1997). The Java reflection is an instance of structural reflection, which allows the programmer to inspect the structure and modify the content of an object during runtime. In our work, the Java reflection is used in the reference duplication and reference redirection steps of the replace operation. It is also used by the user-defined handler to transfer inconsistent fields.. 2.5.2 JNI and JVMDI JNI is usually used by Java applications that need to integrate code written in languages other than Java (Liang 1999), and it can also be used for the time-critical part of a Java application. JNI provides a set of C functions to communicate with Java objects. JVMDI (Sun Microsystems 2002) is the lowest layer of the Java Platform Debugger Architecture (JPDA). It provides a set of C functions to monitor or modify the execution state of a Java application, such as the functions to set a breakpoint, watch a field, or suspend a thread.. 16.
(28) When using JNI or JVMDI, the Java virtual machine is not modified because the code is only compiled into a library that can be loaded by the Java virtual machine.. 2.6. Summary In this chapter, we have surveyed the literature related to dynamic reconfiguration. Dynamic reconfiguration is originally developed in distributed systems. It is later incorporated into several object-oriented programming languages, including CLOS, C++ and Java, as well as non-object oriented languages, such as the assembly language. The idea of dynamic reconfiguration can also be applied two non-traditional application areas. One is protocol architecture and the other is operating system kernel. Although traditional protocol architectures are able to create or remove modules dynamically, dynamic module replacement is not allowed. Similarly, traditional operating system kernels cannot dynamically replace kernel extensions. Every dynamically reconfigurable system must be able to maintain the safe reconfiguration point and essentially there are two programming models. One requires a synchronization protocol between the modules and the underlying system, but the other does not. In order to implement dynamic reconfiguration, several programming tools can ease the development process. Reflection can be used to inspect and set the module state, and persistence can be used to transfer module states. JNI can improve the performance of Java code, and JVMDI can be used for detecting the safe reconfiguration point.. 17.
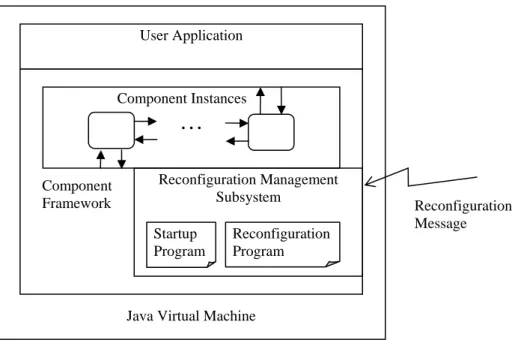
(29) 3 A Dynamically Reconfigurable Protocol Framework using Java Traditional protocol architectures are not dynamically reconfigurable. This chapter describes a dynamically reconfigurable protocol framework based on Java and component-based programming. Section 3.1 presents the architectural overview of the protocol framework. Section 3.2 introduces how to develop reconfigurable components in the protocol framework. Section 3.3 describes the implementation of the protocol framework. Finally, Section 3.4 describes a reconfigurable TCP component based on the protocol framework and evaluates its performance.. 3.1 Architectural Overview 3.1.1. Framework Architecture. The architecture of the component framework is shown in Figure 3-1. The component framework, which is built on top of the Java virtual machine, provides programmers an environment that is suitable for implementing protocols. A protocol stack can be realized using a number of interconnected components. The component framework specifies how components should behave and how they can be connected. A component may provide a service, require a service, or have both functions. Two components can be connected only when one component provides a service that is required by the other component. A running component is called a component instance, which is the basic unit for dynamic reconfiguration. The component framework also provides support libraries for implementing protocols, such as socket, timer, and buffer management libraries. The reconfiguration management subsystem is located in the component framework. It. 18.
(30) User Application. Component Instances. … Component Framework. Reconfiguration Management Subsystem Startup Program. Reconfiguration Program. Reconfiguration Message. Java Virtual Machine. Figure 3-1: Architecture of the component framework.. manages the dynamic reconfiguration process and the life cycle of components. Two entities are executed by the subsystem: the startup program and the reconfiguration program. Each program is a Java class and a specific method will be executed by the reconfiguration management subsystem. The startup program is responsible for creating and connecting component instances to establish a protocol stack. It is executed at the initialization time of the component framework. The reconfiguration program is used to replace a configuration of the protocol stack with a new one. It is executed after receiving the reconfiguration message. Three reconfiguration operations, create, remove, and replace, can be used by the startup program or the reconfiguration program to construct or modify a configuration. After the protocol stack is established, the protocol reconfiguration subsystem waits for the reconfiguration message. The reconfiguration message is generated by the reconfiguration command, which can be invoked like a UNIX shell command. When the message is received, the reconfiguration management subsystem executes the reconfiguration program to bring the protocol stack from the old configuration to the new configuration.. 19.
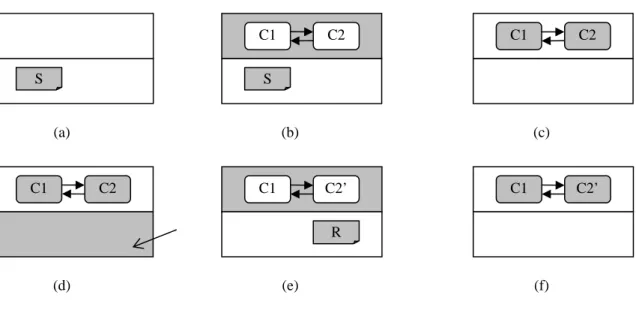
(31) C1 S. C2. C1. C2. S. (a). C1. (b). C2. (c). C1. C2’. C1. C2’. R. (d). (e). (f). Figure 3-2: Dynamic reconfiguration in the component framework.. On top of the component framework is the user application, which is a regular Java application containing a single or multiple threads. The user application uses the services provided by the component framework and the component instances. An interesting feature is that the dynamic reconfiguration is transparent to the user application. That is, the user application does not have to consider dynamic reconfiguration in their programming.. 3.1.2. Dynamic Reconfiguration Procedure. Figure 3-2 shows how components are dynamically reconfigured in the component framework. The shaded areas are those in execution. First, the startup program is executed at the initialization time of the component framework (Figure 3-2a). Next, the startup program creates and connects component instances for the current protocol stack configuration (Figure 3-2b). In the example, the component instances of components C1 and C2 are created and connected. When the startup program terminates, the component instances perform normal processing (Figure 3-2c). During normal processing, the reconfiguration management subsystem may receive the reconfiguration message (Figure 3-2d). On receiving the. 20.
(32) reconfiguration message, the components are temporarily stopped and the reconfiguration program begins to execute (Figure 3-2e). In the example, the instance of component C2 is replaced by an instance of component C2’. After the reconfiguration, both C1 and C2’ continue their normal processing (Figure 3-2f).. 3.2 Component Programming 3.2.1. Component Definition and Component Communication. A component is a Java class. A protocol implementation, such as a TCP implementation, can be modeled as a single or multiple components. Each component instance is a Java object and the programmer can create multiple instances of a component during runtime. A protocol must be able to communicate with adjacent protocols on the same stack. For example, the TCP must be able to communicate with IP. Therefore, the components can communicate with each other via Java interfaces. A Java interface is a class that defines only the prototype of methods and does not provide an actual implementation. The actual implementation can be provided by a class that implements the methods of the interface. Two components can be connected when one component implements an interface and the other holds a reference of that interface. A component that holds the interface reference can therefore invoke methods defined in the interface. The objective of interface and implementation is similar to provide and require constructs of languages that support dynamic reconfiguration (Kramer and Magee 1985; Magee et al. 1993). Component instances are connected during runtime, either by the startup program or by the reconfiguration program. However, during component design time, a component must provide a set of link methods to store the interface references it holds. Thus, the startup. 21.
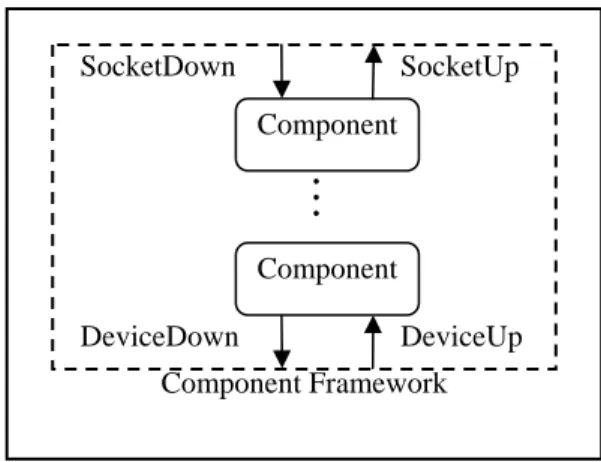
(33) SocketDown. SocketUp Component. … Component DeviceDown. DeviceUp. Component Framework. Figure 3-3: Service interfaces defined by the component framework.. program or reconfiguration program can link two component instances by invoking the corresponding link methods. This technique is popular in designing object-oriented protocol stacks (Ananthaswamy 1995; Buschmann et al. 1996; Krupczak et al. 1998). In order to identify the component instance to be reconfigured, each component instance must have a unique name. The unique name is given as an argument of the create operation and stored in the name field of each component. When invoking the create operation, the startup program or the reconfiguration program must determine the unique name. Unique name helps subsequent reconfiguration programs to address component instances without ambiguity. Component instances are identified by unique names instead of component names because a component may have multiple instances.. 3.2.2. External Interfaces. Components can interact with the user application or the network device through special interfaces defined by the component framework, as shown in Figure 3-3. A component that wishes to interact with the user application must implement the SocketDown interface and have a reference to the SocketUp interface. The SocketDown interface defines the. 22.
(34) following methods: create, connect, bind, listen, accept, sendmsg, and close. The SocketUp interface defines the accept_callback and receive_callback methods. Likewise, a component wishes to interact with the network device must implement the DeviceUp interface and have a reference to the DeviceDown interface. The DeviceDown interface defines the output method and the DeviceUp interface defines the input method.. 3.2.3. Component Execution Model. The component framework adopts a passive component execution model in which each component is passive. A passive component is not bound with a thread, so it is invoked only by the threads owned by the user application or by the component framework. In addition, a component cannot have an infinite loop. That is, each component method must return in a reasonable time. We choose the passive execution model for two reasons. First, the passive model is usually used by protocol implementations of operating system kernels, such as the TCP/IP implementation of the Linux kernel. Second, the passive model is also used to obtain the safe reconfiguration point, which is discussed later.. 3.2.4. Component States. During component replacement, the state of the old component instance is transferred to the new instance. Thus, the component state must be defined before the state transfer. For ease of programming, the component framework treats object states as component states. The component states can therefore be transferred by the standard Java object persistence mechanism, the Java serialization (Sun Microsystems 2001), which is provided by almost every Java virtual machine.. 23.
(35) The Java serialization is used to store the state of a living object in the storage and reconstruct it from the storage later. The programming aspect of the Java serialization can be found in (Arnold et al. 2000). When designing a component, the programmer must declare it as Serializable so that it can be accessed by the Java serialization. Thus, the reconfiguration management subsystem can use the Java serialization to automatically transfer the component state. This approach does not need any proprietary state transfer code written by the programmer. The other benefit of this approach is that if some fields are not considered as part of the component state, the programmer can declare these fields as transient. Transient is a keyword of the Java language and transient fields will be discarded during serialization. Note that the fields referring to other components must be declared as transient because they are not part of the component state.. 3.2.5. User-defined Handlers. Although the component states can be automatically transferred by the component framework, the default state transfer mechanism may not satisfy all of the components. For example, if the new component defines a field that is not present in the old component, the default mechanism will not have sufficient knowledge to determine the suitable value of this field. In such case, the programmer can provide a user-defined handler, which is invoked after the default state transfer. In order to transfer these inconsistent fields, the user-defined handler is allowed to use Java reflection (Sun Microsystems 1997) to inspect and set their values. The Java reflection is a virtual machine feature together with a set of libraries that can inspect the structure and modify the content of objects during runtime. The programming of Java reflection can be found in (Arnold et al. 2000).. 24.
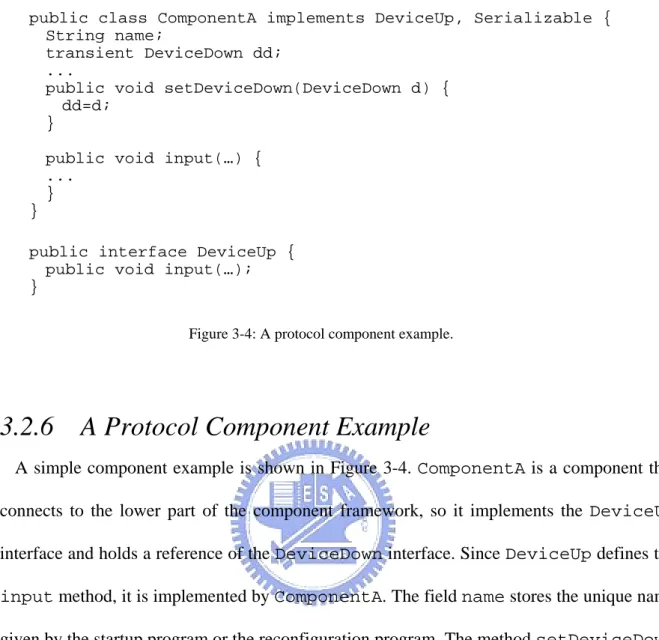
(36) public class ComponentA implements DeviceUp, Serializable { String name; transient DeviceDown dd; ... public void setDeviceDown(DeviceDown d) { dd=d; } public void input(…) { ... } } public interface DeviceUp { public void input(…); } Figure 3-4: A protocol component example.. 3.2.6. A Protocol Component Example. A simple component example is shown in Figure 3-4. ComponentA is a component that connects to the lower part of the component framework, so it implements the DeviceUp interface and holds a reference of the DeviceDown interface. Since DeviceUp defines the input method, it is implemented by ComponentA. The field name stores the unique name given by the startup program or the reconfiguration program. The method setDeviceDown is a link method that stores the reference of DeviceDown to the field dd. The dd field is a transient field because component references do not belong to the component state of ComponentA. ComponentA is declared as Serializable because it has to be used by Java serialization during replacement. Note that a component does not have to inherit from a component base class because we focus on component-based programming rather than object-oriented programming, and a base class is not really necessary for our component framework.. 25.
(37) 3.3 Implementation of the Component Framework 3.3.1. Safe Reconfiguration Point. Safe reconfiguration point is a short period in which the protocol stack can be dynamically reconfigured without inconsistent results. It is necessary because the threads other than the reconfiguration thread can also reside in the component framework, including a thread owned by the component framework that handles incoming messages, one or multiple threads owned by the user application that handle outgoing messages, and a thread owned by the component framework that handles timers. Without any restriction, inconsistent results may be produced because these threads are able to invoke the components while they are reconfigured by the reconfiguration thread. The safe reconfiguration point is governed by the component framework. The exclusive access right is given to the reconfiguration thread when it is about to reconfigure the components. Thus, when the reconfiguration thread is modifying the components, no other thread can invoke them simultaneously. The above behavior is modeled by a Java class that implements a read/write lock. The incoming, outgoing, and timer threads acquire the read lock before invoking the components. The reconfiguration thread acquires the write lock before modifying the components.. 3.3.2. Support Libraries. The component framework provides three support libraries to ease the programming. The socket library is for the user application. The socket library is still the standard Java socket library but a custom socket implementation is plugged in. This socket implementation is connected to the component framework rather than the native socket library of the underlying. 26.
(38) operating system, and it acquires the read lock before invoking the components. When the user application tries to send a message during the reconfiguration process, the thread of the user application will be temporarily blocked in waiting the read lock since the write lock has been acquired by the reconfiguration management subsystem. When the write lock is released after the reconfiguration, the user application thread can get the read lock and then invoke the components. The message buffer library is a modified version of Jbuf, which was originally developed by the HotLava project (Krupczak et al. 1998). With the message buffer library, the protocol headers can be easily added to and removed from a protocol message. The timer library extends the java.util.TimerTask class of JDK1.4.0. In order to reserve the safe reconfiguration point, it acquires the read lock before invoking the timer handling routines.. 3.3.3. Implementation of Reconfiguration Operations. The component framework provides three reconfiguration operations: create, remove, and replace. These operations are provided as a library defined in the operations class. The reconfiguration program is allowed to use all of the operations while the startup program is only allowed to use the create operation. All the operations are related to the component repository, which is an internal data structure maintained by the reconfiguration management subsystem to keeps track of all component instances. The create operation creates a component instance and registers it with the component repository. It also uses the Java reflection to assign the unique name given by the startup program to the component instance. The remove operation removes a component instance from the component repository and detaches it from other component instances so that its memory space can be reclaimed by the Java garbage collector. The replace operation is the most sophisticated one because it is responsible for state. 27.
(39) transfer and external reference management. A component replacement involves two component versions. The original version is called the source component and the new version is called the target component because the component state is transferred from the source component instance to the target component instance. Internally, this operation uses several programming techniques, such as Java serialization, serialization stream instrumentation, and Java reflection. The replace operation consists of eight steps: component finding, object serialization, byte stream instrumentation, object deserialization, reference duplication, reference redirection, user-defined handler invoking, and component registration. The first step searches the component repository to find the source component instance. The second step serializes the source component instance to an in-memory byte stream. This stream temporarily stores the state of the source component instance. The third step, byte stream instrumentation, converts the byte stream from the source component class to the target component class. This step is necessary because multiple versions of a Java class cannot coexist in a Java virtual machine. Thus, the source and target components must be implemented as separate classes. The deserialization step creates the component instance from the instrumented byte stream. Due to the instrumentation, an instance of the target component rather than the source component is created and its state is inherited from the source component instance. In other words, the target component instance is created with the state of the source component instance. The fifth step, reference duplication, copies component references from the source component instance to the target component instance, as shown in Figure 1-1d. This step uses Java reflection to inspect each field of the old component instance. If any field refers to a component instance that is stored in the component repository, the value of this field is duplicated to the same field of the target component instance. The above comparison uses the operator == of the Java language, which can test whether two object references refer to the. 28.
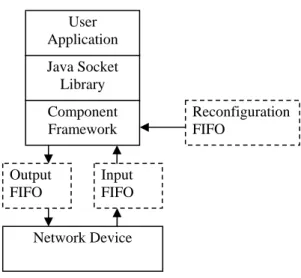
(40) User Application Java Socket Library Component Framework Output FIFO. Reconfiguration FIFO. Input FIFO. Network Device. Figure 3-5: External interfaces of the component framework.. same object. The sixth step, reference redirection, redirects the component references that originally refer to the source component instance to the target component instance, as shown in Figure 1-1e. This step also utilizes Java reflection and it inspects each field of each component instance other than the source component instance. If any field refers to the source component instance, this field will be redirected to refer the target component instance. The seventh step, user-defined handler invoking, is executed when the user-defined handler is provided. The final step deregisters the source component instance and registers the target component instance with the component repository.. 3.3.4. Implementation of External Interfaces. The component framework is able to communicate with both the user application and network device, as shown in Figure 3-5. The user application communicates with the component framework through the standard Java socket library with a custom socket implementation. For the network device, the component framework is connected with two UNIX FIFOs (Stevens 1999). One is for outgoing data and the other is for incoming data. When the component invokes the output method of the DeviceDown interface, the. 29.
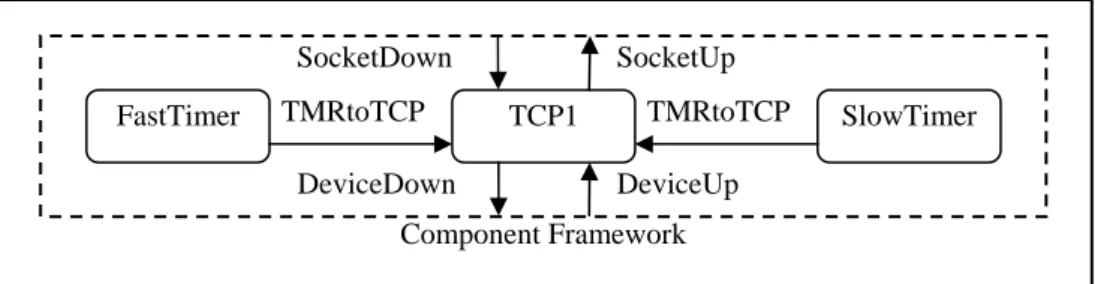
(41) component framework sends the payload to the outgoing FIFO. When receiving a message from the incoming FIFO, the component framework invokes the input method of the DeviceUp interface that is implemented by the component. In addition to the incoming and outgoing FIFOs, the component framework is also connected with a reconfiguration FIFO. When the reconfiguration message is received from the reconfiguration FIFO, the reconfiguration management subsystem will start the reconfiguration process.. 3.4 Dynamic Reconfiguration of TCP In order to demonstrate dynamic reconfiguration, we implement TCP (Postel 1981) on the component framework. There are two reasons for implementing a dynamically reconfigurable TCP. First, TCP is one of the most widely used data communication protocols. Second, since TCP is connection-oriented, the dynamic reconfiguration of a connection-oriented protocol can increase its availability. For example, a server may have several long and overlapped TCP connections. If dynamic reconfiguration is provided, the administrator can upgrade the TCP implementation without closing any TCP connection.. 3.4.1. Structure of TCP Implementation. The TCP implementation consists of three component instances, an instance of TCP1, an instance of FastTimer, and an instance of SlowTimer, as shown in Figure 3-6. Since each component has exactly one instance, the component names are also used indicate the component instances. The TCP implementation follows lwIP (Dunkels 2001), which is a lightweight TCP/IP implementation. We reimplement the basic features of the lwIP’s TCP in object-oriented design. TCP1 communicates with the component framework by implementing the SocketDown and DeviceUp interfaces and holding references to the. 30.
(42) SocketDown FastTimer. TMRtoTCP. SocketUp TCP1. DeviceDown. TMRtoTCP. SlowTimer. DeviceUp. Component Framework. Figure 3-6: Structure of the TCP implementation.. DeviceDown and SocketUp interfaces. To demonstrate dynamic reconfiguration, TCP1 supports only a single connection and will be upgraded by a more complete version later. The other two components, FastTimer and SlowTimer, implement two different timer resolutions required by the TCP specification. Instead of communicating with the component framework, these two components communicate with TCP1 through the TMRtoTCP interface. They register with the timer library provided by the component framework so that the timer library can invoke them periodically. When invoked by the timer library, the timer components invoke the methods defined in the TMRtoTCP interface. Conceptually, although TCP1, FastTimer, and SlowTimer can be combined as a single component, they are separated due to the limitation of the Java timer library. In addition, the two timer components cannot be dynamically reconfigured. We will discuss these issues in the next section.. 3.4.2. Experimental Environment. 31.
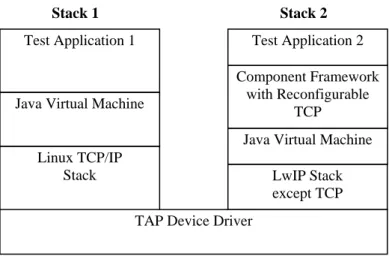
(43) Stack 1. Stack 2. Test Application 1. Test Application 2 Component Framework with Reconfigurable TCP. Java Virtual Machine. Java Virtual Machine Linux TCP/IP Stack. LwIP Stack except TCP TAP Device Driver. Figure 3-7: Experimental environment.. The experimental environment is a Celeron 1.13 GHz PC that runs Linux 2.4.18 and JDK 1.4.0. The environment consists of two protocol stacks to emulate two communicating machines, as shown in Figure 3-7. On top of each stack are the test applications, which exchange data with each other. The first test application uses the original Java socket library, so it is connected to the native Linux TCP/IP stack. Instead, the second test application is connected to the component framework because it uses the Java socket library that is plugged with the custom socket implementation. Since the component framework only contains the TCP layer, it also needs lower-layer protocols, such as ARP, ICMP, and IP. We utilize ARP, ICMP, IP, and device driver layer of lwIP and connect its IP layer to two FIFOs that are managed by the component framework. One is for TCP input and the other is for TCP output. Two protocol stacks are connected by the TAP device driver (Krasnyansky), which is a virtual Ethernet device driver for Linux. The two stacks communicate with each other through this virtual device. Note that our TCP implementation is capable for working in a real network because it can operate with the Linux TCP, which already runs in a large number of networked computers. However, if we want to attach the experimental environment to a real Ethernet, we have to use a modified Ethernet card driver rather than the TAP driver. The modified card driver has. 32.
(44) to intercept all the Ethernet frames and then direct them to the component framework instead of the native Linux stack. The modified card driver will be implemented in the future.. 3.4.3. Dynamic Reconfiguration of the TCP Component. While the TCP1 component is running, we replace it with TCP2, which supports multiple connections. The reconfiguration command is deliberately invoked after TCP1 accepts a connection and this connection enters the ESTABLISHED state. Therefore, the reconfiguration can take place while the two test applications are exchanging data. TCP1 and TCP2 differ both in method and field declarations. The difference in methods does not need special treatment since the methods of TCP1 are just replaced by those of TCP2. However, the difference in fields cannot be directly handled by the component framework because it does not know how to assign values for the fields that are present in TCP2 but not present in TCP1. In this case, the component programmer should provide a user-defined handler to convert them from TCP1 to TCP2. The fields of TCP1 and TCP2 are all the same except at a field that stores protocol control blocks (PCB). PCB is a class that implements the protocol control block of a TCP connection. Since TCP1 only accepts a single connection, it only manages one PCB object. Thus, TCP1 only declares a field p of class PCB to store this PCB object. However, TCP2 has to manage multiple PCB objects, so it declares a field pcb_list of class ArrayList, which is a utility class that can store multiple objects.. 3.4.4. Implementation of User-defined Handler. The user-defined handler is used to convert inconsistent fields defined in TCP1 and TCP2. Since the field p of TCP1 and the field pcb_list of TCP2 differ both in their names and. 33.
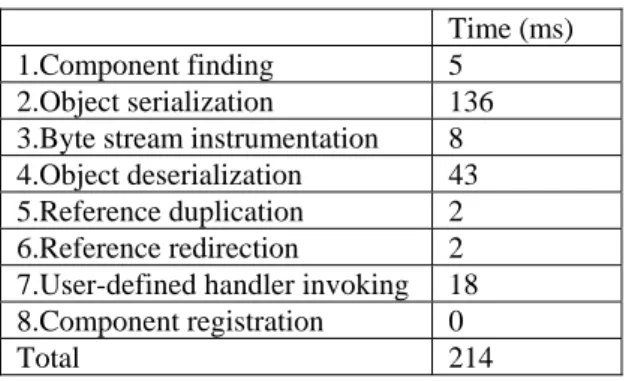
(45) types, they cannot be handled by the Java serialization. Thus, the value of pcb_list will become null after the state transfer. To overcome this problem, the user-defined handler has to move the PCB object from the field p to the field pcb_list. In addition, since TCP1 and TCP2 do not manage the PCB object in the same way, the user-defined handler has to perform different actions depending on the connection state of TCP1. For example, if TCP1 is in CLOSED state, that is, no PCB object has been created yet, the handler does nothing. If the PCB is in LISTEN state, the handler performs three steps. First, an ArrayList object is created. Then, this object is attached to the pcb_list field. Finally, the PCB object is added to pcb_list by invoking the add method of ArrayList. Note that the last two steps are achieved by using the Java reflection. If the PCB is in ESTABLISHED state, the handling process is more complicated because in addition to transferring this PCB object, TCP2 needs another PCB object to wait for new connections. Therefore, the handler duplicates the PCB object, sets the duplicated PCB object to LISTEN state, and adds the resulting PCB object to pcb_list.. 3.4.5. Performance of TCP Reconfiguration. The performance of the TCP reconfiguration in terms of the steps implemented by the replace operation is shown in Table 3-1. All numbers are averaged over a large number of iterations. The reconfiguration process lasts for 214 ms. Since the resolution of the fast TCP timer is 200 ms, the reconfiguration may slightly delay the fast TCP timer but this delay will not cause fatal results. Better performance can be gained by using a faster machine or by improving some critical steps of the replace operation. For example, the most time-consuming steps are object serialization and object deserialization. They are slow because the Java serialization is completely written in Java. Thus, it can be implemented inside the Java virtual machine or by a C library that uses Java Native Interface (JNI).. 34.
(46) 1.Component finding 2.Object serialization 3.Byte stream instrumentation 4.Object deserialization 5.Reference duplication 6.Reference redirection 7.User-defined handler invoking 8.Component registration Total. Time (ms) 5 136 8 43 2 2 18 0 214. Table 3-1: Performance of replacing the TCP component.. Time (ms) 2 ms 3 ms. Outgoing Incoming. Table 3-2: The maximum processing time of the TCP component.. Table 3-2 shows the maximum processing time of the TCP component. The TCP component requires 2 ms for outgoing data and 3 ms for incoming data at most. The incoming processing is slower than the outgoing processing because an incoming TCP segment may trigger the transmission of an acknowledgement segment. Comparing Table 3-2 with Table 3-1, we can find that the TCP processing time is much shorter than its reconfiguration time. Since the TCP processing time is relatively short, the safe reconfiguration point is not difficult to find.. 3.5 Summary In this chapter, we introduced a dynamically reconfigurable software framework for communication protocols. The software framework is based on Java and component-based programming. Following the programming rules specified by the component framework, the programmer can use Java to develop dynamically reconfigurable protocol components.. 35.
(47) The components communicate with each other through standard Java interfaces and they are not allowed to initiate any thread. In addition, each component must be declared as Serializable so that the component state can be transparently transferred. If the formats of the new component and the old component are not compatible, the component state can still be transferred with the help of the user-defined handler. The component framework uses a read/write lock to preserve the safe reconfiguration point. The replace operation is implemented using two programming tools: Java serialization and Java reflection. In order to demonstrate the component framework, a dynamically reconfigurable TCP component is developed. The TCP component replacement process roughly adds a delay of 200 ms.. 36.
(48) 4. A Java-based, General-purpose Component Framework for Dynamic Reconfiguration The previous chapter proposed a dynamically reconfigurable component framework for communication protocols. This chapter proposes a general-purpose component framework for dynamic reconfiguration. The component framework is still Java-based but the implementation is more powerful and efficient. Section 4.1 provides an overview of the component framework. Section 4.2 describes the two implementations of the component framework. The first one extends the implementation described in the previous chapter. The second one adopts a new approach, native programming, which effectively improves the performance. Section 4.3 evaluates the performance of these two implementations using the dynamically reconfigurable TCP component, as described in the previous chapter.. 4.1 Component Framework Overview 4.1.1. Component Model. The architecture of the general-purpose component framework is similar to that of the protocol component framework, as described in Chapter 2. The component model is also similar, but the general-purpose component framework does not define any external interfaces, such as SocketDown or DeviceUp. A general component example is shown in Fig 4-1. Here ComponentA implements an interface called InterfaceA. A method called methodA is declared in InterfaceA so that ComponentA provide an implementation of this method. Since ComponentA connects to another component that implements InterfaceB, it. 37.
數據
+7
相關文件
Students are asked to collect information (including materials from books, pamphlet from Environmental Protection Department...etc.) of the possible effects of pollution on our
Wang, Solving pseudomonotone variational inequalities and pseudocon- vex optimization problems using the projection neural network, IEEE Transactions on Neural Networks 17
volume suppressed mass: (TeV) 2 /M P ∼ 10 −4 eV → mm range can be experimentally tested for any number of extra dimensions - Light U(1) gauge bosons: no derivative couplings. =>
Define instead the imaginary.. potential, magnetic field, lattice…) Dirac-BdG Hamiltonian:. with small, and matrix
The temperature angular power spectrum of the primary CMB from Planck, showing a precise measurement of seven acoustic peaks, that are well fit by a simple six-parameter
• Formation of massive primordial stars as origin of objects in the early universe. • Supernova explosions might be visible to the most
(Another example of close harmony is the four-bar unaccompanied vocal introduction to “Paperback Writer”, a somewhat later Beatles song.) Overall, Lennon’s and McCartney’s
• Describe the role and importance of the following key business functions: human resources management, financial management, operations management, marketing management, information
