2006 IEEEInternationalConferenceon Systems, Man, andCybernetics
October 8-11, 2006, Taipei, Taiwan
Neuro-Fuzzy Implementation of
a
Self-Tuning
Fuzzy
Controller
R. K.
Mudi, Chanchal
Dey, and T. T. Lee,Fellow,
IEEEAbstract-A self-tuning fuzzy PI controller (STFPIC) is
designed elsewhere, using parallelly operated two rule-bases;
one controlrule-base,and the othergainrule-base,eachhaving 49 rules.Theoutputscalingfactor (SF) of STFPICis modified
online by a gain updating factor following an operator's strategy. STFPIC is found to provide significantly improved performance for a wide range of processes. This study is an
attempt for neuro-fuzzy implementations of STFPIC with
considerably lesser number ofrules, which are complete and
capable of realizing almost similar performance as that of STFPIC.We considertwo differentstructuresoftheproposed neuro-fuzzy PI controller (NFPIC); called NFPIC-1 and
NFPIC-2, having only 50 and 49 rules respectively against 98 originalrulesof STFPIC.NFPIC-1 is similarin structure to that
of STFPIC with twoparallel rule-bases, each having 25 rules, whereas, the structure of NFPIC-2 is same as that of a
conventional fuzzy controller with a single rule-base.
Effectiveness of the developed neuro-fuzzy controllers
(NFPIC-1 and NFPIC-2) is demonstrated using second-order linear as well asnonlinearprocesses.
I. INTRODUCTION
Fuzzy
logic controllers (FLCs) are capable to providesatisfactory performances
for both linear and nonlinear complex systems [1, 2]. Both fuzzy logic and neural networks are proved to be universal approximators. But in general fuzzysystems donotpossesslearning capability. On the other hand, neural networks (NN) can learn easily from environment. Neuro-fuzzy (NF) hybrid systems through the integration ofthese two complementary technologies have been successfully tested formanypracticalsystems [3-6].Tomake the conventionalFLCs morepowerfulandrobust, various types of self-tuning features are incorporated with them [7-10]. Mudi etal. [8] proposed a modelindependent scheme for constructing a self-tuning fuzzy PI controller (STFPIC).Itdescribesarobustself-tuningscheme forFLC's, which would be applicable irrespective of thenature of the process and structure of the FLC [7]. In a continuous production process, a skilled human operator always tries to manipulate the controller output depending on the current processstatesi.e., error(e) andchange oferror(Ae)togetthe
This work is supported byNational Science Council, Taiwan, R.O.C. under Grant No.NSC-94-281I-E-009-020.
R. K. Mudi is with the Electrical & Control Engineering Department, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail: rkmudi(iee.jusl.ac.in).
Chanchal Dey iswiththe Department ofApplied Physics, University of Calcutta, Kolkata-700009,India, (e-mail:[email protected]).
T. T. Lee is with the Electrical & Control Engineering Department, National Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C. (e-mail:[email protected]).
processoptimally controlled. This gainmanipulationstrategy is too complex to implement mathematically. An effort has been madetoincorporatetheknowledgeofa skilledoperator with the help of 49 fuzzy rules [8]. These additional gain modifyingrules areconcurrently used with 49control rules of STFPIC to make it a self-tuning controller with an overall improved performance. Attempts have been made through exploratorydataanalysistoextract asmall set ofnew rulesto realize similarperformanceas thatofSTFPIC [11, 12].
Keeping in mind the universalapproximationproperty and learning power of back-propagation algorithm of neural networks, in this study, we try to develop NF models of STFPIC withareduced number ofrules,maintaining thesame level ofperformance. We use themulti-layerfeed-forwardNN model and back propagation algorithm for the tuning of input-output membership functions (MFs) of the proposed neuro-fuzzyPIcontroller(NFPIC). Weconsidertwodifferent control structureswithnearly 5000 less rules thanSTFPIC.In the first case, NF models for control rule-base and gain rule-base are separately trained with only 25 rules each, and they are used in parallel like in STFPIC; we denote this controller asNFPIC-1. In the second case, NF model for the resultant control surface of STFPIC is realized by only 49 rules in place of theoriginal98rules; wecall itNFPIC-2.For performancecomparison betweendeveloped controllers (i.e., NFPIC-1 and NFPIC-2) and STFPIC different linear and nonlinearprocesses aretestedundersetpoint change andload variation withvaryingdead time.Simulationresults showthat NFPIC-1 and NFPIC-2 are capable ofproviding almost the same level ofperformance as that of STFPIC. Since, the present study is based on STFPIC, nextwe provide itsbrief description.
II. THE STFPIC [8]
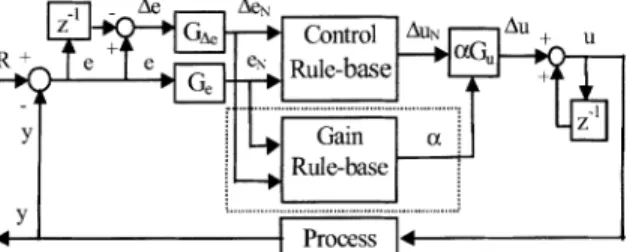
Thesimplified blockdiagram of the STFPIC is shown in Fig. 1a.TheoutputSF ofthe controller is modifiedbya gain updatingfactor'd,shownbythedottedboundary. Detailsof STFPIC are available in [8]. However, to make this study self-contained, various design aspects of STFPIC arebriefly mentioned below.
NormalizedMFs forinputs andoutput(i.e., eN, AeN, and AUN) of the controller (Fig. la) are defined on the common domain [-1, 1], whereas the MFs for ais defined on [0, 1]. Exceptatthe two extremeends,MFs are symmetrictriangles withequalbase and500o overlapwithneighboringMFs. The relationships between the SFs (Ge, GAe and
Gj)
and input-outputvariables of the STFPICare asfollows:eN = Gexe,AeN GAexAe,andAu =(aG,)XAUN. (1)
Theoperationof a PI-type FLCisdescribed by
u(k) =u(k-J) +Au(k). (2)
In Eqn.(2) k is thesampling instance and Au is the incremental change incontroller output, which isdeterminedbytherules oftheform,Rp:If e isE and Ae isAE then Au is AU. The rule-base forcomputing Auis shown inFig. lb, definedon e
and Ae. Thegain updating factor (a) is calculatedusingfuzzy rulesofthe form: Ra: Ife isE and Ae isAE then axis a
Therule-base inFig. Ic is used for thecomputationofaThis is designedinconjunction with the controllerrule-baseinFig. lb with a view to mimicking an operator's strategy, while running aplant. In STFPIC therequired nonlinear controller output
(AusTFpIc)
is generatedby modifying the output ofasimple FLC(AuFpIc)with theupdatingfactor a. i.e.,AUSTFpIC oc a(AUFPIC)
or AUsTFpIC =Ka
(AuFp1c),
(3)whereKis theproportionalityconstant.Eqn. (3)indicatesthat the STFPIC is equivalent to a PI-type FLC (FPIC) with a
dynamic gain.
III. NEURO-FUZZY IMPLEMENTATIONOFSTFPIC The STFPIC uses total 98 rules in the two rule-bases; control rule-base, and gain rule-basewith 49 rules each. Here, we utilize the universal approximation property of NN through itslearning by back propagationalgorithm to generate the nonlinear gain and control surfaces separately with 25 rules each. The corresponding NF controller, NFPIC-1 is shown in Fig. 2a. Also, a single NF model with 49 control rules is considered to realize the same resultant effect of the two rule-bases (Fig. la). Figure 2b shows its associated controller, NFPIC-2. ThesetwoNFcontrollers(i.e., NFPIC-1 and NFPIC-2)areexpectedtoprovidesimilar performanceas that of STFPIC.
Figure2a.Blockdiagram ofthe NFPIC-1
FigureIa.Blockdiagram of the STFPIC
Ae/e NB NM NS ZE PS PM PB NB NB NB NB NM NS NS ZE NM NB NM NM NM NS ZE PS NS NB NM NS NS ZE PS PM ZE NB NM NS ZE PS PM PB PS NM NS ZE PS PS PM PB PM NS ZE PS PM PM PM PB PB ZE PS PS PM PB PB PB
N=Negative, P=Positive,B=Big,M=Medium,S=Small, ZE=Zero
Figurelb.Fuzzy rules forcomputationofAu.
Ae/e NB NM NS ZE PS PM PB NB VB VB VB B SB S ZE NM VB VB B B MB S VS NS VB MB B VB VS S VS ZE S SB MB ZE MB SB S PS VS S VS VB B MB VB PM VS S MB B B VB VB PB ZE S SB B VB VB VB
Figure 2b. Blockdiagramof the NFPIC-2
A.Data generation
Data set should cover the entire operating range of the systemto beidentified. Ifwegeneratethe databy running a processinaclosedloopthensomespecific rules willbeused only. Ifwechangethe initial operating conditions thenanew setofruleswillbefiredfor thesameprocess. In suchcases
identified system will lose its generalization property. To avoid thisproblem, wehave generated data sets by uniform sampling of the entire inputspace. Wehave generatedthree data sets; {e, Ae, Au}, {e, Ae, a}, and {e, Ae, axAu}, each consists of 676 triplets. Where e and Ae are uniformly quantizedwithin theirnormalized domain[-1, 1] asfollows:
Vi(O<i<25) e=-1+ixO.08
and Ae=-l+ixO.08. (4)
The value ofAuoraforeachpairof (e, Ae)isdetermined
by the product inferencing and height method of defuzzification [13].
N=Negative,P=Positive, V=Very,B=Big,M=Medium,S=Small,ZE=Zero FigureI c.Fuzzy rulesforcomputationof(x.
B. Neuro-fuzzy models and training
Weuseafive-layerNF structure as shown in
Fig
is similarto thatused in [3].The two nodes in the are theinputnodes for two inputvariables e and A forward pass, two input nodes transmit the valuec Ae) pair to the second layer. Each individual no secondlayer acts as a fuzzy set. The fuzzified val inputs (i.e.,eandAe)or outputsofthe secondlayer thethird layer, which is the rule-node layer. Nodesir representthe all possiblefuzzy rules for each input p Ae). Links from this third layer to fourth layer pe precondition matching offuzzy rules. Nodes in layerperform fuzzyANDoperation. After rulema outputofthe fourth layer is passedtothe fifthlayer node for defuzzification. The defuzzified output is fromthesingleoutputnode of the fifthlayer.Herecweights betweenany twonodes ofsuccessive layers During training phase, the node in the fifth laye
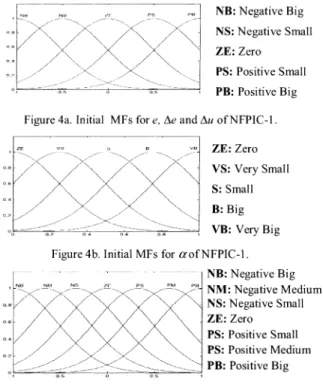
output node is used as the input node to feed th samples as obtained from the relation (4). Detaile' layeroperationofthisneuro-fuzzy model is availab] Initialbell-shapedMFsfor NFPIC-1areshowni and 4b, and those for NFPIC-2 are shown in Fig following relation gives the definition of the me
function:
MF=exp-(X 2)2j
wherea,andqiarerespectively the initial widthand theithMFforaninputx(xmaybeany oneofe,Ae,i
Initial MFs have more than 5000 overlap with ne MFs as shown in Figs. 4. While designing NFP NFPIC-2, parameters of theseMFs (i.e., vi and
qi)
through back-propagation algorithm similarto[3].Output r node L Output [ fuzzyset nodes Rule[ nodes Inputfuzzy [ setnodes Input r nodes l
Figure3.Five-layer neuro-fuzzy model.
>. 3,which first layer Se.During )f each (e, )de ofthe ues of the arefedto thislayer sair
(i.e.,
e, ,rform the the fourth tchingthe or output i obtained ,onnection areunity. r i.e., the Le training I layer by lein[3]. inFigs. 4a An Th..-NB:Negative Big NS: Negative Small ZE:Zero PS:PositiveSmall PB: Positive Big Figure 4a. Initial MFs for e, Ae and Au ofNFPIC-1.ZE VS si B VB ZE: Zero V VS: VerySmall 5:Small B:Big VB:Very Big Figure4b.InitialMFs for aofNFPIC-I.
NB: NegativeBig NSB NM tSS zc- PS PMi P3. NM:NegativeMedium NS:NegativeSmall ZE: Zero PS:PositiveSmall PS:PositiveMedium ______________________________PB: PositiveBig o-1 0f
Figure 4c. InitialMFsfor e, AeandAuofNFPIC-2.
,.*U. 1 llU' Todesign the NFPIC-1 asshown inFig. 2a,wetraintwo
unbership
setsofrulesseparately, each having 25 rules. Onesetofrule is trained to generatethe control surface using five MFs {NB, NS, ZE, PS, PB} for each input-utput variables (i.e.,e,Ae and (5) Au) havingsameinitial width(ua=0.65)andcenterpositions [-1.0, -0.5, 0.0, 0.5, 1.0] asshowninFig. 4a. The othersetof 25rules is trainedtorealize thegain surface of STFPIC.InthisAu1andctr
o case,theinitialMFsforoa
correspondingcenterpositions and.hu
and.in
widthare {ZE, VS, S, B, VB}, [0.0, 0.25, 0.5, 0.75, 1.0], andigCbIorind
0.35 respectively (Fig. 4b). Figures5a
and 5b depict theare-
1and
control surfaces of STFPIC and NFPIC-1 respectively. It appears that there is nosignificant
difference between twosurfaces, though NFPIC-1 uses almost 50% less rules than STFPIC.But,gain surfaces of STFPIC andNFPIC-1 asshown inFigs. 5cand 5d revealsomenoticeable differences (though
notsignificant) between them, specifically around steadystate (i.e.,e 0and Ae 0) This indicates thathighly nonlinear
gain variation mechanism implemented through 49 rules in STFPICisdifficulttorealizewithaNFmodelusing only25 rules. Therefore, the close-loop response of NFPIC-1 is not
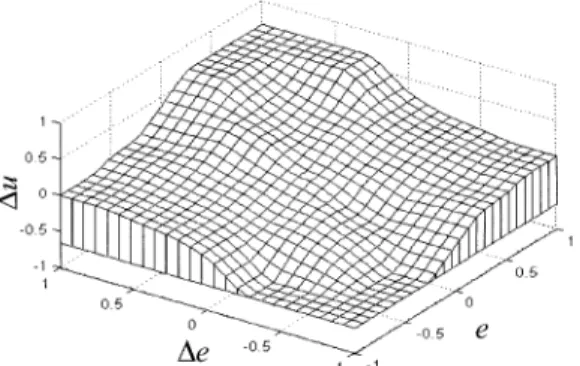
expectedtobeveryclosetothat of STFPIC. Figure5eshows that the resultant controlsurface of STFPIC is smooth without
anyabruptness, unlike itsgain surface (Fig. 5c). Thisproperty
promptedus todevelopNFPIC-2. IndesigningNFPIC-2,only 49 rules are trained to approximate the function of STFPIC having98rules. Here,sevenequal width(a-0.65) MFs {NB,
NM,NS, ZE, PS, PM,PB} with initialcenterpositions [-1.0, -0.66, -0.33, 0.0 0.33, 0.66, 1.0] are used (Fig. 4c). The e control surfaceof NFPIC-2 as shown inFig. 5findicates its close resemblance with that of STFPIC (Fig. 5e), i.e., NFPIC-2 will beexpectedtoprovide close-loopperformance similartothat of STFPIC.
-1 -1
Figure5a. Control surface of STFPIC (uses 49 rules). Figure5e. Resultant control surface of STFPIC (usestotal 98rules;49 control rules and 49 gain rules).
-1~~~~~
I ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~0-5
0. 0~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Figure5b. Control surface ofNFPIC-1(trained by25rules). Figure5f.Control surface of NFPIC-2 (trained by 49 rules).
IV. RESULTS
In order to
investigate
theclose-loop performances
of NFPIC-1 and NFPIC-2having
almost 50% reduced rules compared to STFPIC, we perform simulation study with second-order linear and nonlinear processes under setpoint
change
and load variation withvarying
dead time. We nowpresentthe
performance
analysis
for individualprocesses.Ae -o A. Second-order1 -l
linearprocess
y+y+0.2y=u(t-L)
(6)Figure 5c.Gainsurface of STFPIC (uses49rules).
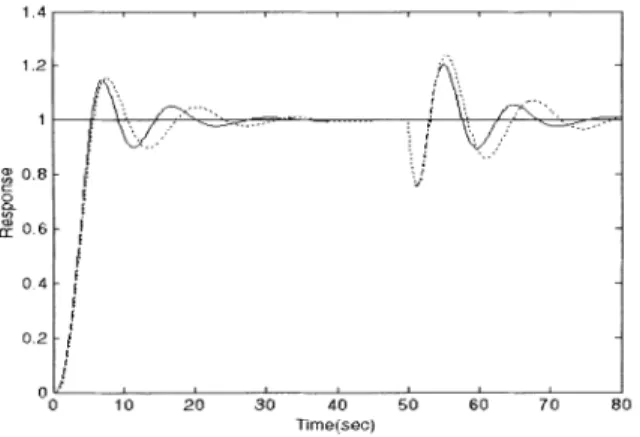
Response characteristics of this linearsystem(6) withL= O.ls and0.2sunderNFPIC-l and STFPICareshown inFigs. 6aand 6brespectively. Figures 6c and 6d show theresponses of(6) under NFPIC-2 and STFPIC. Fromtheresponsecurves
(Figs. 6a-6d),
it is found that both NFPIC-1 and NFPIC-21> - < exhibit similar performance as that of STFPIC. Although,
0.5-,
NFPIC-2 follows STFPIC more closely compared toNFPIC-1. This fact canbe
justified
from thecomparisons
of0, 1 1 cS S l|lillWoe Fig. 6a with Fig. 6c, and Fig. 6b with Fig. 6d. The reason
behindthisdifference between NFPIC-1 and NFPIC-2 isthe
l; zo 5
e presence ofabruptness
inthegain
surface of STFPIC aroundAe -o5 >
steady
< state(Fig. 5c),
which has been difficulttoaccurately
modelusing only25 rules(Fig. 5d)instead of 49 rules.
1.2 mO. L 1, WIO 0 0. 0 10 20 30 40 Time(sec)
Figure 6a. Responses of (6) with L -0.1s[
-1. '3 O cco 0. 0., 60 60 70 81 STFPIC,---- NFPIC-60 70 8
Figure 6b. Responses of (6) with L =0.2s [- STFPIC,----NFPIC-1].
B. Second-order nonlinearprocess
To establish the effectiveness of the proposedscheme,
now weconsideranonlinearprocessdescribed by
y+ y +O.25y2 =u(t-L).
(7)
This second order nonlinear process is tested with two
different values of dead time. Figures 7a and 7b respectively show theresponse characteristics of(7) forL=0.Is and 0.3s
under NFPIC-1 and STFPIC. Responses duetoNFPIC-2 and
STFPICareshown in theFigs.7cand7d. Fromresults(Figs. 7a-7d), weobserve that the overallperformance of NFPIC-1
.1]. or NFPIC-2 is similar to that ofSTFPIC. Asexpected, like
previous case, it is found thatresponse characteristics of (7)
underNFPIC-2 (Figs. 7c and7d)moreclosely track those of
STFPICcomparedtoNFPIC-1. For other linearand nonlinear
processes, we have also found the similar results under
differentvaluesof deadtime.
0 0 1.2 08 0.2 _ 0 10 20 30 40 50 60 71 Timelsec)
Figure 6c Responses of (6)with L=0. s[- STFPIC,----NFPIC-2].
<D C: 1.4 1.2 0.8 0.6 0.4 )..4 2-0 0 10 20 30 40 60 60 7 C Time(sec) Figure 7a.Responses of (7) with L=0.1s
[-0. 0O .4 .2// U 1U IU
I4
0 1 0 20 30 40 Time(sec)Figure 7b.Responses of (7) with L=0.3s
[--STFPIC, ----NFPIC-1].
so 60 70
-STFPIC,----NFPIC-1].
~~20 30 40 SLO 60 70
Time(sec)
Figure 6d. Responses of (6) with L=0.2s[ STFPIC,----NFPIC-2].
.6
I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
4 .1 2 -IE, 8 p 41-2 . .1 10 20 30 40 50 Tlime(sec) 4 01 4, U , _ 1." A 1 1 D eD 0 <Do cn 0 el> co I1. 1 0 -a Iz r_ c. CD5 Cc I 0.2 OcIM o.a .J 04 CO) y-r'aO 6 0,2 0 10 20 30 40 Time(sec)
Figure7c.Responsesof (7) withL=0.1s[- STFPIC,----NFPIC-2].
30 40
Time(sec
Figure 7d. Responses of(7)withL=0.3s[- STFPIC,----NFPIC-2].
REFERENCES
[1] M. Sugeno, Industrial Applications ofFrizzy Control, Amsterdam Elsevier Science,1985.
[2] Y. Zhao and E. G. Collins, "FuzzyPIcontrol design for an industrial weighfeeder",IEEE Trans. on Fuzzy Syst., vol. I 1, no. 3,pp.311 - 319, 2003.
[3] C. T. Lin and C. S. Geroge Lee "Neural networkbased fuzzy logic control anddecision system", IEEE Trans. on Computers, vol. 40, no. 12, 1991,pp.1320- 1336, 1991.
[4] T.Fukuda andT.Shibata, "Theoryand applications of neural networks for industrial systems,"IEEETrans.onIndustrialElectronics,vol. 39, no. 6, pp.472-488, 1992.
[5] C. T. Lin, "A neuralfuzzy control system with structure and parameter learning", Fuzzy Sets andSystems., vol. 70, pp. 183-212, 1995. [6] C. T. Lin, C. F. Juang, and C. P. Li, "Water bath temperature control
withaneural fuzzy inference network", Fuzzy Sets and Systems., vol. lll,pp.285-306,2000.
[7] R. K. Mudi and N. R. Pal, "A robust selftuning scheme forPl- and PD-typefuzzycontrollers", IEEE Trans. on Fuzzy Syst., vol. 7, no. 1, pp. 2 -16,1999.
[8] R. K. Mudi andN. R.Pal, "Aself-tuning fuzzy PIcontroller,"Fuzzy Sets &Systems, vol. 115,No.2, pp. 327-338, 2000.
[9] C. Deyand R. K. Mudi," Design ofPI-type fuzzy controllerwith on-line membership function tuning", Proc. International Conf on NeuralInformation Processing, ICONIP- 2005, Taipei, 2005. [10] A. Chatterjee and K. Watanabe, " An adaptive fuzzy strategy for
motioncontrolof robotmanipulators",Soft Computing, vol. 9, pp. 185
-193,2005.
[11] K. Pal, R. K. Mudi and N.R.Pal, "A new scheme for fuzzy rule based system identification and its application to self-tuning fuzzy controllers,"IEEETrans.onSyst., Man, Cybern., vol. 32, no. 4, pp.
470-482,2002.
[12] N.R.Pal,R. K.Mudi, K.Paland D. Patranabis, "Rule extraction for self-tuning fuzzy controllers," International Journal ofFuzzy Systems, vol. 6,no.2,pp. 71-80, 2004.
[13] D. Driankov, H. Hellendorn and M. Reinfrank, An Introduction to Fuzzy Control,NY:Springer-Verlag, 1993.
V. CONCLUSION
We developed twoneuro-fuzzycontrol structures, NFPIC-1 and NFPIC-2 with similarperformanceasthat ofapreviously
designed self-tuning fuzzy controller (STFPIC). NFPIC- I and NFPIC-2 used almost 50% less rules than STFPIC. All the98rules of STFPICwere notequallyimportantbutitwas
difficult to identify which rules were to be removed and whichwere tobemerged.Withaviewtorealizingthe similar performanceofSTFPICbyNF models with reducednumber ofrules, we utilized the learning capabilityofa multi-layer
NN in designing NFPIC-l and NFPIC-2. Here, widths and center positions ofthe inputandoutput MFs weretuned by back propagation algorithm. Simulation experiments on different second-order linear and nonlinear processes with dead time clearly revealed that the overall performance of NFPIC-1 orNFPIC-2 is close to that ofSTFPIC, although NFPIC-2 is found to follow the STFPIC more closely
compared to NFPIC- 1. This study also revealed that it becomes difficult to accurately approximate a function havingabruptness through aNF model with limited number of nodes inthehiddenlayer.
![Figure 7c. Responses of (7) with L = 0.1 s [- STFPIC, ---- NFPIC-2].](https://thumb-ap.123doks.com/thumbv2/9libinfo/7688225.142909/6.882.78.411.75.297/figure-c-responses-l-s-stfpic-nfpic.webp)
