Proceedings of the 2004 IEEE Taipei, Taiwan, March 21-23, 2004
lntemmtional Conference on Networking. Sensing Conrrol
A
design of small-area automatic wheelchair
Chuan-heng Hsiao, Ming-long
Lee,
Yuan-Chung Shen,
and
Feipei Lai
Department
of Computer Science and Information Engineering
National Taiwan University, Taipei, Taiwan
Email: [email protected], [email protected],
[email protected], [email protected]
A b s t r a c t - There are lots of handicaps and elders inthe world. Many of them are not able to move as easily as normal people. It will be very useful if we develop an automatic wheelchair to help them moue more freely. In this paper we will propose a design of small-area auto- matic wheelchair t o help handicaps O T elders be able to
moue easily in a small area. The most concern in this project is low cost with acceptable performance rather than high velocity OT higrk accuracy. The design ante- grates several technologies to apply on the wheelchair, including wireless positioning. automatic mobile tech- nology: and wireless communication.
On
the oth,er hand, we propose a design that duplicable information can be computed on senier side, and information which i s not duplicable can be computed in constant time. Therefore,our design of small-area automatic wheelchair can cost very low. W e will also propose a design of building map i n f o n a t i o n to make the whole design more complete.
1
Introduction
It is important for everyone to move easily. However, somc people have difficulty t o do so. Some of these p w ple may be blinds. They may depend on other more sen- sitive sensors and guiding dogs or guiding sticks heav- ily t o move. Some of these people may have problems in their legs. These people may need wheelchairs or crutches t o move. Some of these people may be too old to move. They may also need wheelchairs t o move.
In the past, a wheelchair is powered with human hands. and it is very difficult to move more than 100 meters. Currently there is a kind of electric wheelchair. which improves this situation significantly. However, it still needs people to watch out t o avoid accident. The energy to watch out accidents should be saved, and some elders or handicaps may even not be able t o do so. It. is very inconvenient for these people in somc small areas, such as campus, zoo, museum, or some factories. There- fore, it will help these people significantly if we have a small-area automatic wheelchair.
There are at least three advantages of a small-area automatic wheelchair compared with traditional au- tonomous vehicles on road or on highway. These advan-
tages make it possible to be practical and useful widely. Three advantages are listed as the following:
Complexity: In normal situations, such as trans- portation in a city, it may need t o deal with more than hundred thousands places, thousands of routes, and millions of cars. The complexity in nor- mal situations is very high. However, in these small areas, it just needs t o deal with less than thousands of places. Thereforc, the complexity in these areas can be reduced significantly.
e Velocity: In normal situations, such as cars on roads. Vehicles usually move with more than 40 KM/hr. However, 5 KM/hr, or even 3 KM/hr is enough for handicaps in these small areas.
e Safety: In normal situations, the damage is very se- rious if some accident happened. However, because the velocity in these areas is very low, the damage will not be serious if some accident happened. The design of small-area automatic wheelchair can be viewed as an application of light-weight automatic transportation syst,em. Light-weight automatic trans- portation system can be defined as the following:
e Light-weight automatic transportation system: Light-weight automatic transportation system is a kind of automatic transportation system which has some characteristics the following:
-
The number of nodes n on thc maps is less-
The velocity v of vehicle is less than some con- than some constant value C,.stant value C,,.
With current technology, C, is set, as 1000 and
C,
is set as 5 KM/hr in this paper. Lighbweight automatic transportation system can be useful in a small area and non-efficient transportation. This transportation sys- tem is similar t o Kelly’s AMTS [l], which transports materials in factories.Since usually the handicaps or elders are not very rich because of the inability of movement, the most concern
in this project is not the velocity or accuracy but low cost with acceptable performance. This is slightly dif- ferent with many other autonomous vehicle projects.
Applying automatic vehicles on wheelchair has been proposed by Madarasz in 1986 121. However, technol- ogy has been improved significantly during these years. Zhan proposed using wireless positioning onto intelligent transportation system in 2000 131. Grzywna proposed a modulation of building automatic vehicles in 2001 [4]. Also, some technologies of other projects are similar to part of the technologies we need [5] 161. We integrate these technologies to have a complete design of small- area automatic wheelchair.
2 Designation
2.1 Concept
Here we try to apply agent concept onto the small- area autonomous wheelchair. As mentioned by Russeull and Norvig [7], agent can be viewed as Figure 1.
...
Figure 1: Diagram of agent concept
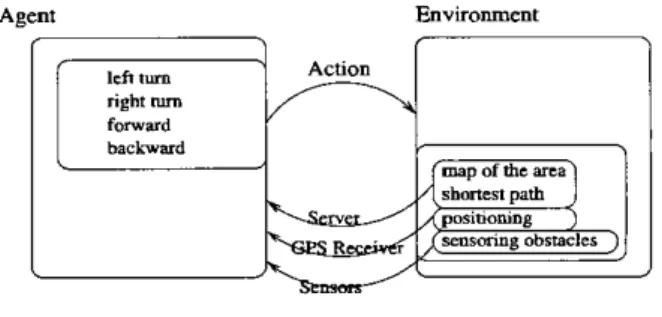
As shown on Figure 1, the agent constantly gets nec- essary information from environment and then acts and affects back to the environment. The information is modulated as at least four necessary parts for a small- area autonomous wheelchair:
e map of the area: The map contains the information of routes, places we can go, buildings and other ob- stacles. This information provides the whole view
of the small area.
shortest route: Although this can be computed af- ter retrieving the map, since the time complexity of computing the shortest ronte is O ( n 3 ) [SIl it will he e5cient if it can be provided by the others. positioning: The wheelchair needs to know where it is currently, and then it can decide how to move to the target entry.
sensing obstacles: Becanse the environment is very dynamic, there must be some minor obstacles not listed on the map. The wheelchair must have the ability to sense these obstacles to avoid accidents. The actions are also modulated as four parts for small- area autonomous wheelchair, forward, backward, left- turn and right-turn.
Agent Environment
tight turn forward backward
p0sitioning
Figure 2: Diagram of small-area autonomous wheelchair
Therefore, the diagram of our design of small-area autonomous wheelchair is shown as Figure 2
Agent Environment
Figure 3: Diagram of methods of retrieving information Map information and the shortest ronte informa- tion are duplicable for every small-area autonomous wheelchairs in the same area. Therefore, they can be served with the server in the area. The methods of r e trieving information is illustrated as Figure 3.
The bottleneck of computation is in the shortest ronte, which is 0 ( n 3 ) 181. The rest of data can be computed in O(1) after data is retrieved. Therefore, our small-area autonomous wheelchair can he equipped with a lightweight mobile device, such as PDA, mobile phone, or Iiitel 8051 microprocessor products.
2.2 Procedure
The application of a small-area autonomous wheelchair can be completed with the following procedure:
In server site, the location of each node on roads and target places can be retrieved by using wireless positioning technology. And then the information is recorded on the map. After building this map, the server can compute the shortest route with time complexity O ( n 3 ) .
When a small-area autonomous wheelchair enter- ing into the area, the mobile device built in the wheelchair will automatically communicate with the server of the small area, and get the map of the area.
e After getting the map of the small area, user can choose one of the places listed on the map.with various input method, such as keyboard, mouse, or even speech recognition. And then the small-
area automatic wheelchair will send request of the shortest route t o the server.
The server will send back the shortest route. And then the small-area automatic wheelchair will go to the target place according t o the route. The route betwcen nodes on the road is assumed t o be straight when building the map. Also, the smd-area auto- matic wheelchair can use wireless positioning to get the information of current location.
With current position P, and the next node we will pass P,,, the small-area automatic wheelchair can compute the direction D, axcording t o the follow- ing equation:
D, = P, ~ P, (1) The current direction of the small-area automatic wheelchair D , can be iterated by having the head and tail of wheelchair with wireless positioning de- vices. The difference of direction
D
can be com- puted as the following:D
= D , - D , (2)D can be expressed as a twc-dimensional vector ( X o :
Yo).
Therefore, the radius 0 t o be%urned can be computed as the following:2.3
There is a situation that the sensors detect some obstacle on the place where the small-area automatic wheelchair will go. A simple solution is dealt with the following procedure:
1. First, it is assumed that the obstacle is movable. Therefore, the small-area automatic wheelchair will wait for some short time
t
and then try to move again.A
Problem of the Procedure
2. If the obstacle is still there, then it is assumed that the obstacle is not large enough t o block the whole road. Therefore, the small-area automatic wheelchair will try t o move t o other directions for some short, distance and then back to the target places.
3. If the small-area automatic wheelchair continuely meets the obstacle for some time T , it assumes that this road is blocked, and sends the request t o server t o reiterate another route.
2.4
Map
Building
Many prcjects are similar t o this paper. However, one problem that these kinds of project can not be useful is that these projects do not mention how t o provide the map for these projects. Because our positioning is based on wireless positioning, the map of the small arca can be got from local government. If the is not available from government, the data can be retrieved with the following procedure:
Choose the key nodes which need t o be positioned. Use wireless positioning on these nodes
0 Complete the map by grouping nodes as buildings,
routes, entries, or obstacles.
3
Implementation
A prototype is implemented with the following spec- ification:
3.1 Equipment
The equipment is illustrated as the following: e wheelchair: We use electric 3-wheel scooter pro-
duced by PiHsiang Machinery MFG. Co. as our wheelchair, which is shown in Figure 4.
Figure 4: A motor and a gear added on the scooter
wireless positioning: We use t.he DGPS receiver produced by Holm Technology Inc. as shown in Figure 5 .
mobile controlling: Although the electric scooter has the power to move forward and backward, the left turn and the right turn need to be manipulated manually. Therefore, we add a gear and a motor with 5V/12A to implement the left turn and right turn, which is shown as Figure 4. We use Intel 8051 microprocessor to control the movement of the wheelchair, which is shown as Figure 6.
Figure 6 Automatic controlling modulc with 8051
map building: We develop a program to build map with wireless positioning, which is shown as Figure 7.
Figure 7: User interface of building map
main program: We develop a program to imple- ment the procedure of our designation of small-area automatic wheelchair.
3.2
Cost
The cost of the implementation can be illustrated as Table 1. The price is less than $1000, which is affordable by many people.
3.3
Performance
We tested the prototype in our campus. The speed of wheelchair is set to be 4 KM/hr, which is similar to the speed of walk with normal people. The error of
DGPS receiver is around 4M with this speed. Since the width of roads in our campus is about 5M, the error is tolerable. Each step is completed in Is. Each step moves 2M. Figure 8 is the track of the small-area automatic
~
Table 1: The cost of the implementation software
wheelchair motor
total
<
$1000wheelchair on a straight 35M road, where bold line is ideal route, and dash line is real route of the small-area automatic wheelchair passing the road. Although the performance shown in Figure 8 is not very good, it is acceptable in this test.
Figure 8: Track of small-area automatic wheelchair on 35M straight road
4
Conclusion
I t is very useful to help handicaps or elders to move easily in a small area. We integrate several technologies to propose a complcte design of s m d - a r e a automatic wheelchair. The whole system is modulated as several parts which can be improved independently. Wireless positioning is used to replace traditional role of com- puter vision in automatic vehicle. Wireless communica- tion is used to retrieve map and the shortest route infor- mation from local server. We also provide a prototype implementation. The cost is low and the performance is acceplable. which fits OUT conceru.
5
Future
Work
Here we have a prototype of small-area automatic wheelchair. However, the tradeoff of cost and perfor- mance should be tuned further to find the most suitable combination.
On the other hand, hierarchical map structure may be able to make the designation extended t o a large area. This designation is to view map of a large area with
major route first, and then we zoom in the map with small area and find the exact entry.
References
[l] A. Kelly and A. T. Stentz, “An approach to rough terrain autouomow mobility,” in International Con- ference on Mobile Planetary Robots, Jan. 1997. [2] R. L. Madarasz, L. C. Heiny, R. F. Cromp, and
N. M. Mazur, “The design of an autonomous vehi- cle for the disabled,” IEEE Journal of Robotics and Automation; vol. 2, pp. 117-126, 1986.
[3] Y . Zhao, “Mobile phone location determination and its impact on intelligent transportation systems,” IEEE Trans. on Intelligent Transportation Systems, vol. 1, pp. 55-64, 2000.
[4] 3 . W. Grzywna, D. E. M. Schwartz, and D. A. A. Arroyo, “Kelvin: Kart for long distance vision nav- igation,” in 2001 Florida Conference on Recent Ad-
vances in Robotics, Florida A&M University, May 10-11 2001.
[5] A. Zelinsky and S. Yuta, “A unified approach to planning, sensing and navigation for mobile robots,” in International Symposium on Ezperimen- tal Robotics (3rd ISER), Kyoto, Japan. Oct. 1993> pp. 444-455.
[6] A. A. Reyes and A. Dogan, “Autonomous vehicle lab initiative at uta,“ in A I A A Unmanned Unlimited Systems, Technologies. and Operations-Aerospace, Land, and Sea Conference and Workshop €4 Exhibit, Hyatt Regency Islandia, Sam Diego, California, Sept. 15-18, 2003.
[7] S. Russell and P. Norvig, Artijkinl Intelligent A Modern Approach, 2nd ed. Prentice Hall, 2003. [E] T. H. Cormen; C. E. Leiserson, and R. L. Rivest,
Introduction to Algorithms. Cambridge, Mas- sachusetts: MIT Press, 1989, ch. 26.