A Novel Crowding Genetic Algorithm and Its
Applications to Manufacturing Robots
Chiu-Hung Chen, Tung-Kuan Liu, and Jyh-Horng Chou, Senior Member, IEEE
Abstract—A niche genetic algorithm (GA) based on a novel twin-space crowding (TC) approach is proposed for solving multimodal manufacturing optimization problems. The proposed TC method is designed in a parameter-free paradigm. That is, when cooperatively exploring solutions with GAs, it does not require prior knowledge related to the solution space to design additional problem-dependent parameters in the evolutionary process. This feature makes the proposed TC method suitable for assisting GAs in solving real-world engineering optimization problems involving intractable solution land-scapes. A set of numerical benchmark functions is used to compare effectiveness and efficiency in the proposed TCGA, in different niche GAs, and in several evolutionary computation methods. The TCGA is then used to solve multimodal joint-space inverse problems in serial-link robots to compare its convergence performance with that of conventional methods that apply the sharing function. Finally, the TCGA is used to solve iterative collision-free design problems for linkage-bar robotic hands to demonstrate its effectiveness for generat-ing diverse solutions durgenerat-ing the design process.
Index Terms—Crowding method, joint-space, multimodal optimization, niche genetic algorithm (GA).
I. INTRODUCTION
E
NGINEERING problems usually contain multiple optima in the solution space. Particularly, joint-space inverse problems encountered when designing robots with multiple degrees of freedom (DOFs) have been validated as multimodal problems [1], [2]. In some multimodal optimization problems, a simple genetic algorithm (GA) [3] cannot efficiently and simul-taneously maintain multiple global or local optima. Therefore, the population is easily trapped in a limited number of solutions, which is a condition that results in premature solutions with no capability to obtain better results. Therefore, niche methods [4]have been developed to reduce genetic drift effects resulting from the replacement operator in the simple GA.
By adding scalingfitness or by changing the fitness compe-tence rule, niche methods modify the simple GA by guiding convergence so that multiple peak solutions can be maintained in the search space [5]. The capability to locate multiple loci often gives niche GAs the robustness and effectiveness needed to explore optima in various multimodal optimization problems [6]–[8]. When used to solve optimization problems, however, most niche methods require prior knowledge such as the niche radius or the distance threshold [9], [10].
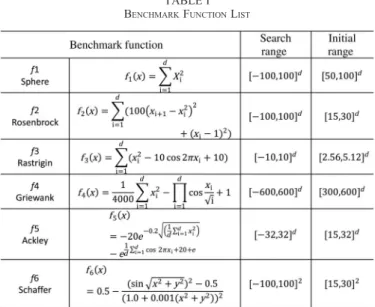
To address these limitations, this study proposes twin-space crowding (TC), a novel niche method designed in a parameter-free paradigm; that is, it does not require prior knowledge of practical optimization problems, and the proposed crowding mechanism does not require additional customized parameters. This feature makes the proposed TC method suitable for com-bined use with GAs for solving real-world optimization pro-blems, in which the solution landscapes are often intractable. To evaluate its performance in solving multimodal problems, the set of numerical benchmark functions presented in Ratnaweera et al. [11] and Bakwad et al. [12] is used to compare convergence performance between the proposed TC genetic algorithm (TCGA) and other methods.
Additionally, to evaluate its applicability for solving practical engineering problems, the TCGA is used to solve joint-space inverse kinematics problems in two different mechanisms cur-rently used in robotic manufacturing systems: serial-link robots (SLRs) and linkage-bar robotic hands. An SLR has an open-loop structure with multiple DOFs, whereas a linkage-bar robotic hand has a closed-loop structure with only a single DOF. Since these mechanisms have very different kinematical characteris-tics, solving their inverse problems provides a convincing vali-dation of the solution capabilities of the proposed approach.
Compared with path planning problems, which have been intensively studied in the past [13]–[15], joint-space inverse problems in serial-link or linkage-bar robots are very different and harder to solve because the inverse problems specified in the world coordinates must be solved in the joint space where the mapping between the joint space and Cartesian space is nonlinear, singular, and multimodal [16], [17]. However, a literature review [2] shows only a few studies of the evolutionary solution multi-plicity of inverse problems originating from multimodal mapping. Therefore, the proposed TCGA is used to explore multiple inverse solutions for SLRs, and its convergence performance is compared with that of the algorithm developed in Kalra et al. [2], in which the sharing function [5] is applied. This study also considers the engineering design problem of a six-bar robotic
1551-3203 © 2014 IEEE. Translations and content mining are permitted for academic research only. Personal use is also permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
Manuscript received August 28, 2013; revised February 14, 2014; accepted March 27, 2014. Date of publication April 11, 2014; date of current version August 05, 2014. This work was supported by the National Science Council of Taiwan under Grant NSC 102-2221-E-244-013, Grant NSC 102-2221-E-151-021-MY3, and Grant NSC 102-2217-E-151-001-MY3. Paper no. TII-13-0578. C.-H. Chen is with the Department of Information Technology, Kao Yuan University, Kaohsiung 82151, Taiwan.
T.-K. Liu is with the Institute of Engineering Science and Technology, National Kaohsiung First University of Science and Technology, Kaohsiung 824, Taiwan.
J.-H. Chou is with the Department of Electrical Engineering, National Kaohsiung University of Applied Sciences, Kaohsiung 807, Taiwan; with the Institute of Electrical Engineering, Department of Mechanical and Automation Engineering, National Kaohsiung First University of Science and Technology, Kaohsiung 824, Taiwan; and also with the Department of Healthcare Administration and Medical Informatics, Kaohsiung Medical University, Kaohsiung 807, Taiwan (e-mail: [email protected]).
Color versions of one or more of thefigures in this paper are available online at http://ieeexplore.ieee.org.
hand. The problem is to obtain a synthesis design for a six-bar structure that can consider obstacles in the manufacturing envi-ronment. In contrast with the relatively simple synthesis design for low-order four-bar linkage structures [18]–[20], the design problem considered here is to synthesize a high-order, highly constrained, and collision-free coupler for a single-DOF mecha-nism. Such problems are usually solved using classic precise-point methods [21], [22] to guide the coupler along the desired path, which limits designflexibility. The iterative design method proposed here uses TCGA to enable iterative exploration of multiple inverse collision-free solutions.
II. TWIN-SPACECROWDINGGENETICALGORITHM
The literature showed many improvements in evolutionary optimization and the development of efficient solvers for engi-neering problems [23]–[27]. In the niche family of GAs, popu-lation diversity is improved using a set of algorithms to change the genetic schema in the population replacement phase.
Like a simple GA, a general niche GA first initializes and evaluates the population to select the best fitting chromosomes for the mating pool. It then applies crossover and mutation operators to generate and evaluate the new offspring. When it evolves a new generation, the general niche GA does not merely reserve individuals with the best fitness. It usually applies a specific replacement operator to assist in selecting new parents.
A. Niche Family
One of the earliest niche mechanisms is preselection [28], in which an offspring can only replace one of its parents. A crowding schema [29] called niche crowding (NC) was then proposed for improving the preselection process during which an offspring replaces the most similar individual taken from a randomly selected subpopulation based on the crowding factor (CF) value. In this schema, the measurement of similarity between two real-code chromosomes is usually based on the Euclidean distance. The NC tends to cause a large genetic shift in multimodal functions, especially when the selection subpop-ulation size is small.
Another well-known niche method is the sharing function, which reduces thefitness of highly similar individuals within the population based on the specified niche radius [5]. A practical difficulty of the sharing function method is choosing an adequate radius value, which is usually problem-dependent and implies that the numbers and shapes of peaks must be known. A similar condition applies to the selection of specific parameter values in various niche algorithms, e.g., the selection of clearing radius (distance) in the clearing method [30], [31] and the selection of species distance in the species conservation method [32]–[34]. However, in most industrial applications, very little a priori knowledge about the fitness landscape is available during parameter setting. Therefore, some crowding methods apply a parameter-free paradigm in algorithm design.
Mahfoud [35] proposed a deterministic crowding (DC) meth-od for designing a competence rule in Algorithm 1.
Algorithm 1: DC Algorithm (Mahfoud [35])
Step 1: Randomly select two different parents, and . Step 2: Apply crossover, mutation and other operations to
generate two offspring, and . Step 3: If
Then
If Fitness( ) is better than Fitness( ) Then replace with
If Fitness( ) is better than Fitness( ) Then replace with
Else
If Fitness( ) is better than Fitness( ) Then replace with
If Fitness( ) is better than Fitness( ) Then replace with
End.
In Algorithm 1, the DC method uses a deterministic replace-ment operator to group the closest offspring and parent, and a parent can be replaced only by better offspring that are grouped together. However, although the DC reduces selection errors, genetic shift problems can still prevent the algorithm from efficiently locating multiple loci. Additionally, DC rarely out-performs NC when . These issues are further addressed by the experiments discussed in Section III below.
Ling et al. [7] proposed a cluster crowding (CC) method in which a temporary tree structure is used to maintain the cluster-ing relationship between parents and offsprcluster-ing. The CC method sets the parents as the roots and then classifies and inserts all offspring under the parent root according to the Euclidean-distance measurement. After completing the classification, the CC treats the coverage of each sub-tree as a niche range and uses the best individual as the niche center. When it enters a new generation, the CC sorts all cluster centers and then adds them to a parent pool one at a time according to the following rule: if the centers of the newly added niches are not located within the niche range formed by the individuals in the parent pool, add them to the pool; otherwise, hold another competence tournament to determine whether the new center can be added; if thefinal parent pool size is still insufficient to form the new parent population, generate and initialize chromosomes to obtain the complete parent population.
Although the CC can locate multiple loci, its limitation is its slow convergence speed. Therefore, its solution quality is sub-stantially poorer compared with those of both the NC and DC methods under the same evolutionary conditions. This issue is discussed further in Section III.
B. Twin-Space Crowding
Generally, two key operations are implicitly implemented in various crowding methods: the first operation ensures that in-dividuals with the best fitness in the population are usually
invested with the highest survival probabilities; the second operation is a competence tournament among the population individuals located in the same niche. However, due to the insufficient knowledge of the real solution space, erroneous judgments about niche locations can prevent perfect implemen-tation of the two operations in the crowding algorithms.
To overcome the difficulty of locating niches, this study proposes a new mechanism for dynamically tracking niche coverage by performing several competence tournaments to increase the survival probabilities of high-fitness individuals and to remove redundant individuals within a pair of niches. The pseudo steps of Algorithm 2 are specified as follows. Algorithm 2: TC Algorithm
Definition:
: dominates ( has betterfitness compared to ). Input:
(1) The whole parent population with
size .
(2) The whole offspring population with size .
(3) Dimension number of any population member. (or number of genes in any chromosome).
Output: Updated parent population .
Initialization: Define a temporary variable , where . [Phase One]
Step 1: Find where .
Step 2: If then and go to step 9.
[Phase Two]
Step 3: Compute the set
. Step 4: If then go to step 9 (i.e. ignoring this offspring). Step 5: Define a temporary member .
Let , .
Step 6: If , then , and go to step 9.
Step 7: If , then go to step 9 (i.e. ignore this offspring). [Phase Three]
Step 8: Randomly choose a member from , and let . Step 9: Let . If , then go to step 1 (next offspring).
Otherwise, stop the algorithm.
The proposed TC algorithm has three main phases. For each offspring member, e.g., , the first phase finds the closest parent, which is designated . If dominates , is directly replaced by . Notably, the competence rule used in this phase resembles that used in NC method. However, the offspring that
are lost in thefirst phase but have better fitness values than the other parents, have another opportunity to enter the later phases. The second phase uses a modified version of the hill–valley (HV) function [36]. The HV function isfirst performed to obtain a temporary member and to judge whether members and are located at different loci (niches). The modified algorithm replaces with if is better than (since is also better than in this situation). If is not better than and , the third phase is performed.
The third phase determines the competence between and the parents located in the circled area where the circle center is and the radius is . In the area, one parent that is poorer than
is randomly chosen and replaced by . This step is required because, under this condition, the chosen parent is not only poorer but also closer (more crowding) to in comparison with . The third phase can be viewed as a self-adaptive niche exploration method, and the competence is held in a dynamically circled area. That is, the proposed algorithm dynamically selects the crowding space range for the survival competence and does not require specific niche radius information.
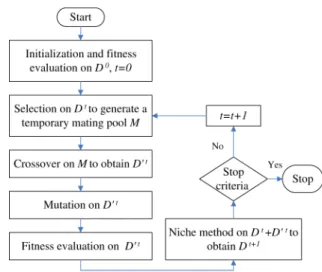
Fig. 1 shows the classic geneticflow of a general niche-based GA. That is, when incorporated in the GA, the proposed niche method (TC) is inserted into theflow as the replacement operator to generate a new parent population before a new generation is executed.
III. COMPARATIVESTUDYSOLUTIONS FORMULTIMODAL
BENCHMARKFUNCTIONS
Multimodal optimization problems have been intensively stud-ied in the literature (e.g., [5]–[12], [37]). Although niche methods were originally designed for use in combination with GAs, some studies have applied them in other evolutionary algorithms (EAs). Examples include differential evolution (DE) [38] series containing the crowding DE (CDE) [39], the sharing DE (SDE) [39], and the species-based (SBDE) DE [40]. Notably, the CDE method is also a parameter-free approach. Its extension of DE with a crowding scheme enables it to track and maintain multiple optima. Further-more, some hybrid approaches have also extended EAs by includ-ing local search methods (e.g., gradient-descent search [41]) or the
Fig. 1. Flowchart of a general niche-based genetic algorithm. The th parent set is denoted by , and the th offspring set is denoted by .
locality principle [42] for solving multimodal optimization pro-blems. However, these hybrid approaches usually include new parameters to cooperate with the locality mechanisms (for a detailed review, see [41]). Additionally, some studies [e.g., particle swarm optimization (PSO)-based [43] approaches] have applied self-tuning techniques automatically adjusting specific parameters during the evolutionary loops [11], [44]. Even though these approaches may still need to design customized constants, for example, the precision in distance [44], these constants can be properly chosen in most practical applications. These self-tuning approaches thus approximate the parameter-free paradigm. Our study also compares convergence in various parameter-free and self-tuning evolutionary methods for solving multimodal optimi-zation problems.
The hardware and software specifications for the development and execution environment in the experiments were an Intel P4 3.2G CPU (single-core) with 1G memory, XP SP2 OS, and Visual C++ 6.0 compiler. For each benchmark problem, optimization results were obtained for each crowding method using the same call numbers and the same genetic operators, including selection, crossover, and mutation. The customized genetic parameters for all test functions were set as follows: population size 50, offspring size 40, crossover rate 1.0, and mutation rate 0.05. The call numbers in different dimensional problems were set as suggested in the literature. In the sections, the comparison results were listed in tables for 100 independent runs of each method. Some poor solutions (larger than 1000) were indicated by dashes, and best solutions were indicated by bold type. Furthermore, a minimum value lower than 0.000001 was recorded as 0.
A. Genetic Operators and Parameters
The genetic operators applied in our experiments can be summarized as follows.
1) Selection and Constraint Handling: Tournament selection with size 2 is used in all experiments. A binary tournament with the following constraint domination relation developed by Deb [45] is used to handle constraints in the evolutionary schema: for two chromosomes, and , dominates if the following conditions are satisfied:
1) is feasible, but is infeasible;
2) both and are infeasible, but has smaller constraint value;
3) both and are feasible, but has betterfitness. 2) Crossover and Mutation: Here, a one-cut-point (1X) crossover operator is integrated with an arithmetical operator. The proposed method generates new offspring in the following steps: randomly choose two parents, select one cut-point, swap the genes before or after the cut-point for probability, and compute the linear combination of the gene at the cut-point. For example, the selected parents are specified as
and . Suppose the cut-point is . The
probabilistically generated offspring are
where , , and .
To increase diversity, both interpolation and extrapolation methods are used to obtain the linear combinations used in the crossover.
Mutation is performed by randomly selecting two genes and then normalizing and swapping them.
B. Numerical Benchmark Functions
To evaluate its solution capability, the proposed TCGA is compared with different methods using a set of benchmark functions.
1) Locating Multiple Loci: Thefirst experiment evaluated the capability to locate optima in the solution space of the Shubert function, which is specified as follows:
For the specified range, which includes nine optima, Fig. 2 shows the population distribution after several loops are executed. This figure shows that only the NC, CC, and TC methods can locate all optima. Thus, the DC method is a relatively unsuitable solver for exploring solution multiplicity in multimodal problems.
Fig. 2. Results obtained by niche GAs for Shubert function. The red circles indicate the locations of the optima, and the black asterisks indicate the locations of the population members. (a) Initialized population. (b) Population of 300th generation.
TABLE I BENCHMARKFUNCTIONLIST
V. CONCLUSION
This work developed a new TC NC method of solving numerical multimodal optimization problems. Since the pro-posed algorithm does not require prior knowledge of the solution space to assist the crowding mechanism, the proposed TCGA is suitable for solving engineering problems in which the solution space is intractable.
The effectiveness and efficiency of the proposed TCGA were verified using a set of numerical benchmark functions, and the joint-space inverse problem in SLRs was used to compare solution performance between the TCGA and other methods. The experimental results show that the proposed TCGA obtains better solutions within the same number of evolutionary function calls. Another experimental application of the TCGA for solving an iterative collision-free design problem involving a six-bar robotic transferring hand further confirmed that, by effectively and progressively exploring diverse solutions, the TCGA can provide designers with a wide selection of solutions.
REFERENCES
[1] D. Manocha and J. F. Canny,“Efficient inverse kinematics for general 6R manipulators,” IEEE Trans. Robot. Autom., vol. 10, no. 5, pp. 648–657, Oct. 1994.
[2] P. Kalra, P. B. Mahapatra, and D. K. Aggarwal,“An evolutionary approach for solving the multimodal inverse kinematics problem of industrial robots,” Mech. Mach. Theory, vol. 41, pp. 1213–1229, 2006.
[3] J. H. Holland, Adaptation in Natural and Artificial Systems. Anna Arbor, MI, USA: Univ. of Michigan Press, 1975.
[4] D. E. Goldberg, Genetic Algorithms in Search, Optimization, and Machine Learning. Reading, MA: Addison Wesley, 1989.
[5] D. E. Goldberg and J. J. Richardson,“Genetic algorithms with sharing for multimodal function optimization,” in Proc. 2nd Int. Conf. Genet. Algo-rithm Genet. AlgoAlgo-rithm Their Appl., 1987, pp. 41–49.
[6] B. Sareni, L. Krahenbuhl, and A. Nicolas,“Niching genetic algorithms for optimization in electromagnetics. I. Fundamentals,” IEEE Trans. Magn., vol. 34, no. 5, pp. 2984–2987, Sep. 1998.
[7] Q. Ling, G. Wu, Z. Yang, and Q. Wang,“Crowding clustering genetic algorithm for multimodal function optimization,” Appl. Soft Comput., vol. 8, pp. 88–95, 2008.
[8] A. A. Alugongo,“Multimodal problems, premature convergence versus computation effort in dynamic design optimization,” in Proc. World Congr. Eng. (WCE), vol. 3, 2011, pp. 2537–2542.
[9] B. Sareni and L. Krahenbuhl,“Fitness sharing and niching methods revis-ited,” IEEE Trans. Evolut. Comput., vol. 2, no. 3, pp. 97–106, Sep. 1998. [10] J. E. Vitela and O. Castaños,“A sequential niching memetic algorithm for continuous multimodal function optimization,” Appl. Math. Comput., vol. 218, pp. 8242–8259, 2011.
[11] A. Ratnaweera, S. K. Halgamuge, and H. C. Watson,“Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients,” IEEE Trans. Evol. Comput., vol. 8, no. 3, pp. 240–255, Jun. 2004.
[12] K. M. Bakwad, S. S. Pattnaik, B. S. Sohi, S. Devi1, B. K. Panigrahi, and S. V. R. Gollapudi,“Multimodal function optimization using synchronous bacterial foraging optimization technique,” IETE J. Res., vol. 56, pp. 80–87, 2010.
[13] C. Hocaoglu and A. C. Sanderson,“Planning multiple paths with evolu-tionary speciation,” IEEE Trans. Evol. Comput., vol. 5, no. 3, pp. 169–191, Jun. 2001.
[14] C. T. Cheng, K. Fallahi, H. Leung, and C. K. Tse,“A genetic algorithm-inspired UUV path planner based on dynamic programming,” IEEE Trans. Syst. Man, Cybern. C., Appl. Rev., vol. 42, no. 6, pp. 1128–1134, Nov. 2012. [15] C. C. Hsu, Y. J. Chen, M. C. Lu, and S. A. Li,“Optimal path planning incorporating global and local search for mobile robots,” in Proc. IEEE 1st Global Conf. Consum. Electron. (GCCE), 2012, pp. 668–671.
[16] T. Yoshikawa,“Manipulability of robotic mechanisms,” Int. J. Robot. Res., vol. 4, pp. 3–9, 1985.
[17] R. Muszynski,“A solution to the singular inverse kinematic problem for a manipulation robot mounted on a track,” Control Eng. Pract., vol. 10, pp. 35–43, 2002.
[18] F. Freudenstein,“An analytical approach to the design of four-link mechan-isms,” Trans. ASME, vol. 76, pp. 483–492, 1954.
[19] F. Freudenstein, “Approximate synthesis of four-bar linkages,” Trans. ASME, vol. 77, p. 853, 1955.
[20] R. R. Bulatovic and S. R. Dorevic,“Control of the optimum synthesis process of a four-bar linkage whose point on the working member generates the given path,” Appl. Math. Comput., vol. 217, pp. 9765–9778, 2011. [21] G. H. Martin, Kinematics and Dynamics of Machines. New York, NY,
USA: McGraw-Hill, 1982.
[22] C. H. Chen, T. K. Liu, I. M. Huang, and J. H. Chou,“Multiobjective synthesis of six-bar mechanisms under manufacturing and collision-free constraints,” IEEE Comput. Intell. Mag., vol. 7, no. 1, pp. 36–48, Feb. 2012.
[23] J. T. Tsai, K. M. Lee, and J. H. Chou,“Robust evolutionary optimal tolerance design for machining variables of surface grinding process,” IEEE Trans. Ind. Inform., vol. 10, no. 1, pp. 301–312, Feb. 2014. [24] V. Roberge, M. Tarbouchi, and G. Labonte,“Comparison of parallel genetic
algorithm and particle swarm optimization for real-time UAV path plan-ning,” IEEE Trans. Ind. Inform., vol. 9, no. 1, pp. 132–141, Feb. 2013. [25] S. H. Hur, R. Katebi, and A. Taylor,“Modeling and control of a plastic film
manufacturing web process,” IEEE Trans. Ind. Inform., vol. 7, no. 2, pp. 171–178, May 2011.
[26] P. Siano, C. Cecati, H. Yu, and J. Kolbusz,“Real time operation of smart grids via FCN networks and optimal powerflow,” IEEE Trans. Ind. Inform., vol. 8, no. 4, pp. 944–952, Nov. 2012.
[27] W. Zeng and M. Y. Chow,“Modeling and optimizing the performance-security tradeoff on D-NCS using the coevolutionary paradigm,” IEEE Trans. Ind. Inform., vol. 9, no. 1, pp. 394–402, Feb. 2013.
[28] D. J. Cavicchio, “Adaptive search using simulated evolution,” Ph.D. dissertation, Dept. Comput. Commun. Sci., Univ. of Michigan, Ann Arbor, MI, USA, 1970.
[29] K. A. De Jong,“Analysis of the behavior of a class of genetic adaptive systems,” Ph.D. dissertation, Dept. Comput. Commun. Sci., Univ. of Michigan, Ann Arbor, MI, USA, 1975.
[30] A. Petrowski, “A clearing procedure as a niching method for genetic algorithms,” in Proc. IEEE Conf. Evol. Comput., Nagoya, Japan, 1996, pp. 798–803.
[31] A. Della Cioppa, C. De Stefano, and A. Marcelli,“On the role of population size and niche radius infitness sharing,” IEEE Trans. Evol. Comput., vol. 8, no. 6, pp. 580–592, Dec. 2004.
[32] K. Deb, J. P. Li, M. E. Balazs, G. T. Parks, and P. J. Clarkson,“A species conserving genetic algorithm for multi-modal function optimization,” Evol. Comput., vol. 10, pp. 207–234, 2002.
[33] J. P. Li and A. Wood, “Random search with species conservation for multimodal functions,” in Proc. 11th Conf. Congr. Evol. Comp., Trond-heim, Norway, 2009, pp. 3164–3171.
[34] C. Stoean, M. Preuss, R. Stoean, and D. Dumitrescu,“Multimodal optimi-zation by means of a topological species conservation algorithm,” IEEE Trans. Evol. Comput., vol. 14, no. 6, pp.842–864, Dec. 2010.
[35] S. W. Mahfoud,“Niching methods for genetic algorithms,” Ph.D. disserta-tion, Dept. Gen. Eng., Univ. of Illinois, Urbana, IL, USA, 1995. [36] R. Ursem,” Multinational evolutionary algorithms,” in Proc. IEEE Congr.
Evol. Comput., Washington, DC, USA, 1999, pp. 1633–1640.
[37] K. Deb and A. Saha,“Finding multiple solutions for multimodal optimiza-tion problems using a multi-objective evoluoptimiza-tionary approach,” in Proc. 12th Annu. Conf. Genet. Evol. Comput., 2010, pp. 447–454.
[38] R. Storn and K. Price,“Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces,” J. Global Optim., vol. 11, pp. 341–359, 1997.
[39] R. Thomsen,“Multi-modal optimization using crowding-based differential evolution,” in Proc. Congr. Evol. Comput., 2004, vol. 2, pp. 1382–1389. [40] X. Li,“Efficient differential evolution using speciation for multimodal function optimization,” in Proc. Conf. Genet. Evol. Comput. (GECCO), Washington, DC, USA, 2005, pp. 873–880.
[41] J. Ronkkonen,“Continuous multimodal global optimization with differen-tial evolution based methods,” Ph.D. dissertation, Dept. Inf. Technol., Lappeenranta Univ. Technology, Finland, 2009.
[42] K. C. Wong, C. H. Wu, R. K. P. Mok, C. Peng, and Z. Zhang,“Evolutionary multimodal optimization using the principle of locality,” Inform. Sci., vol. 194, pp. 138–170, 2012.
[43] J. Kennedy and R. Eberhart,“Particle swarm optimization,” in Proc. IEEE Int. Conf. Neural Netw., Perth, WA, Australia, 1995, pp. 1942–1948. [44] S. Pasupuleti and R. Battiti, “The gregarious particle swarm optimizer
(G-PSO),” in Proc. Genet. Evol. Comp. Conf. (GECCO), Seattle, Washington, USA, 2006, pp. 67–74.
[45] K. Deb,“An efficient constraint-handling method for genetic algorithms,” Comput. Methods Appl. Mech. Eng., vol. 186, pp. 311–338, 2000.
[46] R. Battiti and G. Tecchiolli,“Learning with first, second and no derivatives: A case study in high energy physics,” Neurocompt., vol. 6, pp. 181–206, 1994.
[47] M. A. Luersen and R. Le. Riche,“Globalized Nelder–Mead method for engineering optimization,” Comput. Struct., vol. 82, pp. 2251–2260, 2004. [48] H. Ghiasi, D. Pasini, and L. Lessard,“Constrained globalized Nelder–Mead method for simultaneous structural and manufacturing optimization of a composite bracket,” J. Compos. Mater., vol. 42, no. 7, pp. 717–736, 2008. [49] K. S. Fu, R. C. Gonzalez, and C. S. G. Lee, Robotics: Control, Sensing,
Vision, and Intelligence. New York, NY, USA: McGraw-Hill, 1987. [50] T. H. S. Li, Y. H. Wang, C. C. Chen, and C. J. Lin,“A fast color information
setup using EP-like PSO for manipulator grasping color objects,” IEEE Trans. Ind. Informat., vol. 10, no. 1, pp. 645–654, Feb. 2014.
[51] K. Deb and A. Kumar,“Real-coded genetic algorithms with simulated binary crossover: Studies on multimodal and multiobjective problems,” Complex Syst., vol. 9, pp. 431–454, 1995.
[52] K. Deb and M. Goyal,“A combined genetic adaptive search (GeneAS) for engineering design,” Comput. Sci. Inf., vol. 26, pp. 30–45, 1996.
Chiu-Hung Chen received the B.Sc. degree in computer engineering from National Chiao Tung University, Shinchu, Taiwan, in 1990; the M.Sc. degree in computer science and information engineer-ing from National Taiwan University, Taipei, Taiwan, in 1992; and the Ph.D. degree in engineering science and technology from the National Kaohsiung First University of Science and Technology, Kaohsiung, Taiwan, in 2009.
He is currently an Assistant Professor with Kao Yuan University, Kaohsiung. From 1992 to 1999, he was a Manager with the Institute of Information Industry, Taipei. From 2000 to 2002, he was a Senior Manager with Photon Computer, Taipei. From 2003 to 2006, he was a Senior Manager with ULead Inc., Taipei. His research interests include evolutionary computation, multiobjective optimization, intelligent manufacturing, game intelligence, and multimedia system.
Tung-Kuan Liu received the B.S. degree in mechan-ical engineering from National Akita University, Aki-ta, Japan, in March 1992, and the M.S. and Ph.D. degrees in mechanical engineering and information science from National Tohoku University, Sendai, Japan, in March 1994 and March 1997, respectively. Currently, he is a Professor with the Mechanical and Automation Engineering Department, National Kaohsiung First University of Science and Technology, Kaohsiung, Taiwan. From October 1997 to July 1999, he was a Senior Manager with the Institute of Informa-tion Industry, Taipei, Taiwan. From August 1999 to July 2002, he was an Assistant Professor with the Department of Marketing and Distribution Management, National Kaohsiung First University of Science and Technology. His research interests include artificial intelligence, applications of multiobjective optimization genetic algorithms, and integrated manufacturing and business systems.
Jyh-Horng Chou (SM’04) received the B.S. and M.S. degrees in engineering science from National Cheng-Kung University, Tainan, Taiwan, in 1981 and 1983, respectively, and the Ph.D. degree in mecha-tronic engineering from National Sun Yat-Sen University, Kaohsiung, Taiwan, in 1988.
Currently, he is the Chair Professor with the Depart-ment of Electrical Engineering, National Kaohsiung University of Applied Sciences, Kaohsiung, as well as a Distinguished Professor with the Institute of Electrical Engineering, National Kaohsiung First University of Science and Technology, Kaohsiung. He has coauthored three books and published more than 250 refereed journal papers. He also holdsfive patents. His research interests include intelligent systems and control, computational intelligence and methods, automation technology, robust control, and quality engineering.
Prof. Chou was the recipient of the 2011 Distinguished Research Award from the National Science Council of Taiwan, the 2012 IEEE Outstanding Technical Achievement Award from the IEEE Tainan Section, the Research Award and the Excellent Research Award from the National Science Council of Taiwan 14 times, and numerous academic awards from various societies.