COMPUTER MODELLING
PERGAMON
Mathematical and Computer Modelling 38 (2003) 533-549www.elsevier,com/locate/mcm
Stochastic
System Modeling
and Optimal
Control
of Incident-Induced
Traffic
Congest ion
JIUH-BIING
SHEU
Institute of Traffic and Transportation, National Chiao Tung University 4F, 114 Chung Hsiao W. Rd., Sec. 1, Taipei, Taiwan 10012, R.O.C.
YI-HWA CHOU AND MEI-CHUAN WENG
Department of Civil Engineering
National Taiwan University Taipei, Taiwan, R.O.C.
(Received December 2001; revised and accepted March 20031
Abstract-Incident-induced traffic congestion is a critical issue in formulating urban traffic con- gestion problems, and also a major cause that contributes to the invalidity of trafIic signal control. This paper presents a prototype of real-time local signal control method, and explores its applicability in alleviating incident-induced traflic congestion on the roadway between two adjacent intersections for incident management. The architecture includes two major parts:
(1) formulating time-varying lane trafIic state variables and control variables under conditions of lane-blocking incidents with a discrete-time non-linear stochastic model, and
(2) developing a real-time control algorithm for predicting dynamically control variables. To generate efficiently traflic data used in model tests, we employed the Paramics microscopic traffic simulator, which is developed to model and analyze ITS traffic flow conditions. According to the measures of two proposed spacebased incident-impact indexes, the preliminary test results indicate the superiority of the proposed real-time signal control method in comparison with fixed-time signal control modes which are currently used at the study site. We do expect that this study can stimulate research on incident management, and extend to network-wide incident-responsive traffic control for the development of advanced traffic management systems (ATMS). @ 2003 Elsevier Ltd. All rights reserved.
Ke~Ords--Incident-induced traffic congestion, Incident-responsive, Incident management, Kal- man filtering techniques.
1. INTRODUCTION
Incident-induced traffic congestion remains a critical issue in the development of advanced in- cident management systems. The abnormal impact of incidents on trafhc congestion not only undermines terribly the mobility, but can also be a major cause of the malfunction of traffic signal control on surface streets. In reality, we have pointed out that such anomalous traffic congestion This research was supported by the grant NSC 90-2211-E327-011 from the National Science Council of Taiwan. The authors also wish to thank the referees for their helpful comments.
0895-7177/03/% - see front matter @ 2003 Elsevier Ltd. All rights reserved. doi: 10.1016/S0895-7177(03)00249-8
during incidents may affect significantly the stability of intralane as well as interlane traffic flows, and contribute to unexpected errors in the predictions of traffic states which are used exten- sively in early developed signal control modes as the basis for traffic control and management [I]. Similar viewpoints can also be found in Scemama’s study which summarized the limits of the existing traffic control systems facing congestion phenomena [2]. Consequently, such problems of prediction divergence and disability of signal control may precipitate other types of traffic flow phenomena including bottlenecks, queue overflows, and gridlocks.
To date, there exists a limited number of traffic control technologies that can be used to ad- dress, efficiently and effectively, incident-induced traffic congestion on surface streets. Scemama proposed an artificial intelligence based traffic supervisory module termed CLAIRE, which was developed to continue the SAGE traflic control system in operation in Paris for congestion man- agement [2]. Through six built-in functions, including congestion monitoring, control, and recog- nition, CLAIRE initializes the congestion management mechanism using three-min. occupancy rates. One distinctive feature of CLAIRE is that its architecture provides an interface to inte- grate with other specific traffic control and management systems such as SCOOT and PRODYN to enhance the system performance with respect to on-line congestion management. Despite the aforementioned features of CLAIRE in terms of congestion management, its applicability and testing in incident-induced congestion cases warrant further research. The updated version of the British SCOOT system is claimed to possess the functionality of incident management [3]. Through the integration with the INGRID automatic incident detection system and the system of VAMPIRE, which is a computer program for operating variable message signs, the objective of incident management appeared to be achievable via utilizing SCOOT, Version 3.0. Neverthe- less, critical issues relevant to the operational efficiency of such a sophisticated SCOOT package remain. For instance, the performance of the SCOOT package members must rely to a great extent on that of each other. In addition, system calibration and data communication remain a critical issue in the SCOOT system package.
In addition, much effort has been devoted to investigating various sophisticated methodolo- gies for improving system performance of demand-responsive signal control for oversaturated cases [4-B]. However, there is a lack of capability, among the contemporary signal control algo- rithms, in responding to diverse incident-induced trafhc congestion conditions in real time. Two striking examples are raised to emphasize our concerns in the applicability of the published signal control technologies for incident cases. One is the validation of these published control modes in preventing queue overflows at an isolated intersection, and the other one is their capability in terms of dealing with gridlock events to accomplish the objective of system optimization. De- tails in the advanced traffic signal control approaches as well as their limitations can be found elsewhere [l], and thus, are not presented in this paper.
In addition to the aforementioned control-based technologies, there is a growing trend of com- bining elaborately several management-based systems to serve the purpose of incident manage- ment. One notable example is the British MOLA system [9], which integrates an on-line simula- tion program MCONTRM conducted for traffic assignment with variable message signs (VMS). In the process of incident handling, a number of feasible route diversion strategies in cooperation with VMS are simulated. The performance of two of the simulated suitable strategies together with the “do nothing” strategy (i.e., without VMS assistance) is then evaluated, and the relative best strategy is implemented. Nevertheless, more research is needed regarding the integration of MOLA with the traffic control operator as well as the acquisition of real-time traffic data to ensure on-line implementation of incident management. Other strategies such as the utilization of distributed video networks, and the combination of expert systems and geographic information systems can also be found in related literature [lO,ll].
In view of the importance of developing advanced traffic control systems for real-time incident management in urban areas, this study attempts to explore a real-time local signal control ap- proach in response to lane-blocking incidents on the roadway between two adjacent intersections.
Given incident-related information including incident location and the onset of incident duration, this study serves two main purposes including:
(1) reducing incident impact to the greatest extent, and
(2) preventing queue overflows that affect traffic flows at upstream intersections.
In order to accomplish these goals, we propose a stochastic optimal control based method which includes formulating incident effects on interlane and intralane traffic states with a discrete-time, nonlinear stochastic model, and developing a recursive estimation algorithm used for updating lane traffic states such as lane-changing fractions and queue lengths as well as signal control variables of the intersection downstream to the incident site. Note that the mechanism of the proposed method is tentatively limited to local signal control to prevent over-congestion at the downstream intersection in the presence of a lane-blocking incident on the upstream roadway. Issues with respect to network-wide incident-induced congestion events such as queue overflow and gridlock cases are not addressed in the current research scenario, and warrant further research in which more sophisticated technologies based on system-optimization control principles may be needed. The following section details the specification of these state variables as well as the proposed methodology.
2. MODEL
FORMULATION
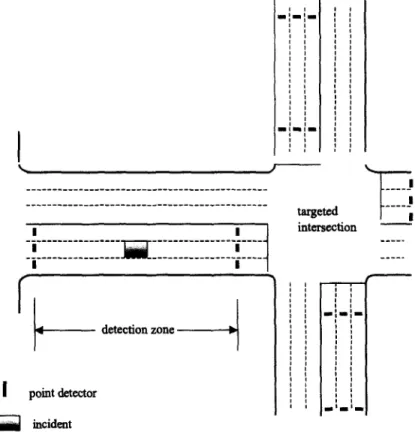
This study focuses on investigating arterial lane-blocking incidents occurring on t,he road- way between two adjoining intersections. In contrast with arterial incidents, incidents occurring within an intersection, namely, intersection incidents, may face different operational problems associated with different geometric as well as traffic characteristics, and thus, they are addressed elsewhere [l]. Figure 1 illustrates graphically the basic requirement of the detector layout imple-
mented for the use of the proposed incident-responsive local signal control method. As depicted in Figure 1, a given pair of point detector stations are installed on the roadway associated with each link connecting the targeted intersection and a given adjacent intersection. In the presence
I
---
T
---
I
I
--- -_---
of a lane-blocking incident occurring on a given link which is regarded as a detection zone, the raw traffic data collected from the pairs of detector stations are utilized to estimate zone-wide incident effects on interlane and intralane traffic states in the detection zone as well as to control signal timing plans implemented at the targeted intersection in response to diverse incident-induced traffic congestion problems at the targeted intersection.
Three groups of state variables including (1) basic lane traffic states,
(2) decision variables, and
(3) incident impact are specified for model formulation in the study.
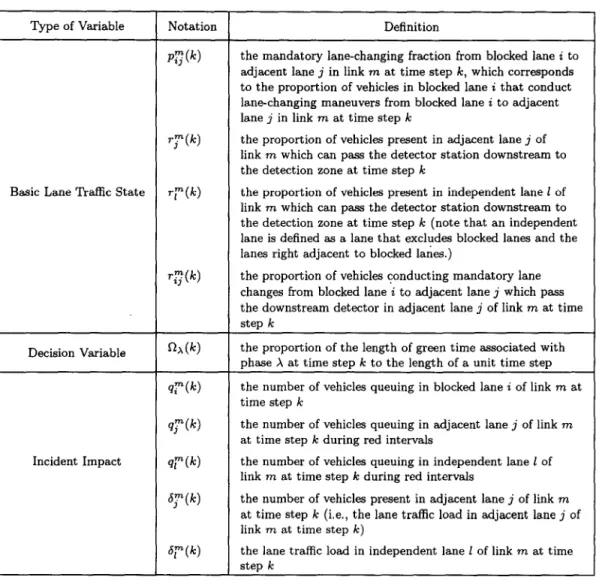
Herein, basic traffic variables characterize incident-induced interlane and intralane traffic maneu- vers under real-time incident-responsive signal control; decision variables determine the lengths of green time associated with specific phases of signal control. In addition, spaced-based incident impact monitors the effects of incidents on intralane traffic flows in real time. Table 1 summarizes the notations of the aforementioned state variables.
Table 1. Notations of state variables. Type of Variable
Basic Lane Traffic State T’(k)
Decision Variable Incident Impact Notation PC(k) +‘W
r,?(k)
Rx(k)G”(k)
qj’W
G’W
ay(k)
T’(k) Definitionthe mandatory lane-changing fraction from blocked lane i to adjacent lane j in link m at time step k, which corresponds to the proportion of vehicles in blocked lane i that conduct lane-changing maneuvers from blocked lane i to adjacent lane j in link m at time step k
the proportion of vehicles present in adjacent lane j of link m which can pass the detector station downstream to the detection zone at time step k
the proportion of vehicles present in independent lane 1 of link m which can pass the detector station downstream to the detection zone at time step k (note that an independent lane is defined es a lane that excludes blocked lanes and the lanes right adjacent to blocked lanes.)
the proportion of vehicles conducting mandatory lane changes from blocked lane i to adjacent lane j which pass the downstream detector in adjacent lane j of link m at time step k
the proportion of the length of green time associated with phase X at time step k to the length of a unit time step the number of vehicles queuing in blocked lane i of link m at time step k
the number of vehicles queuing in adjacent lane j of link m at time step k during red intervals
the number of vehicles queuing in independent lane 1 of link m at time step k during red intervals
the number of vehicles present in adjacent lane j of link m at time step k (i.e., the lane traffic load in adjacent lane j of link m at time step k)
the lane traffic load in independent lane 1 of link m at time step k
In order to facilitate model formulation and algorithm development, five assumptions are pos- tulated below:
(1) all the basic lane trafhc states follow Gaussian-Markov processes;
(2) green splits are the only sets of timing variables being considered as decision variables; (3) the incident duration is known beforehand;
(4) route rediversion due to incident-induced congestion is not considered; and (5) drivers fully comply with mandatory lane-changing maneuvers.
Utilizing the fundamentals of stochastic optimal control theories [12,13], a discrete-time nonlin- ear stochastic model is proposed for the real-time estimation of the aforementioned time-varying state variables. Systematically, the proposed stochastic model comprises three groups of dynamic equations, including
(1) recursive equations,
(2) measurement equations, and (3) boundary constraints.
These equations are presented, respectively, as follows. Recursive Equations
The recursive equations denote the relationships between the next-time-step and current-time- step basic lane traffic states in the stochastic system. The fundamental relationships among state variables in these equations were built on the basis of the first assumption. The derived rationales seem acceptable. For instance, the driver’s lane-changing behavior conducted at the next time step may depend mainly on the lane traffic states at the current time step, but not rely on the earlier states. The assumption with respect to properties of time-varying lane traffic states is therefore postulated to build the state transition equations. Accordingly, the state variables are supposed to possess the Markovian properties in the deterministic environment, mimicking incident-free traffic flow states. However, under lane-blocking incident conditions, these states may be affected incident-induced congestion represented by noise terms, which are assumed to follow Gaussian processes. Therefore, a stochastic system characterizing incident-induced lane traffic states is introduced’. Detailed discussions of corresponding rationales can also be found in our previous research [1,14,15]. The generalized form of the recursive equations is given by
x (k + 1) = f [+), fix(k),
kl + L [W, h(k), kl Wk).
0)
In equation (l), X(k+l) is a [cz=, (3n,” + n?)] x 1 time-varying vector of basic lane traffic states at time step k+l, where ny and nr are defined as the number of lanes adjacent to blocked lane i and the number of independent lanes on link m, respectively; M represents the total number of links connecting to the targeted intersection; f[z(k), QA(k), k] represents a [cf=, (3nT + ny)] x 1 time-varying vector of basic lane traffic states (z(k)) and d ecision variables (Qx (k)) at time step k;G$WW4~ kl
is a [c,“=, (3n7 + nr)] x [Cz=i (3ny + n?)] diagonal noise matrix which is dependent on basic lane traffic states (z(k)) as well as time-varying decision variables (Rx (k)) ;and W(k) corresponds to a [x2=, (3n,” + nr)] x 1 state-independent Gaussian noise vector. In the recursive equations, X(k+l), f[x(k), Cl,(k). k], L[z(k), Rx(k), k], and W(k) can be fur- ther expressed as
X(k+l) = Col(p$(k+l),r,“(k+l),r~(k+l),r~(k+l), m= 1,2,.,.,&f), (2)
f[z(k),fi~(k),k] = Col(p~(k),52,,(k)rjm(k),Rxj(k)r~(k),Rxl(k)rlm(k), m = 1,2... ,A[), (3)
W(k + 1) = Co1 (wpc(k + l), w,;l(k+l),w,~(k3-l),w,~(k+1), ,M),
(4) m = 1,2,. . .
‘It is worth mentioning that the formulation of noise terms stem from our basic idea that incident-induced traffic disturbances are regarded as the major sources causing the instability of lane traFrc flows under conditions of lane-blocking incidents; meanwhile the magnitudes of these disturbances depend on three factors:
(1) probability of vehicular queuing in the blocked lane, (2) the ease of traffic flowing through the adjacent lane, and (3) the variety of upstream new traffic arrivals.
where
pp + 1) = co1 ($(k + l), j = 1,2,. * . ) J”) , rjm(k + 1) = Co1 (~j”(k + l), j = 1,2,. . . , J”) , r$(k + 1) = Co1 (r;(k + l), j = 1,2,. . , , J”) , ry(k + 1) = Co1 (rp(Ic + l), 1 = 1,2,. . . , L”) ,
p?(k) = co1 (p;(k), j = 1,2,. . . ) J”) ) fh, (k)rjm(k) = co1 (Rx, (k)rj”(k), j = 1,2,. . . ) J”) , i22xj (k)?$(k) = co1 (S-& (I+;(k), j = 1,2,. . . , J”) ) Rx, (k)rl”(k) = co1 (Rx, (Q-F(k), 1 = 1,2,. . . ) L”) ,
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
w& + 1) = Co1 (wpB(k + l), j = 1,2,. . . , Jm) , (13) w,?(k + 1) = Co1 (w,,,(” + l), j = 1,2,. . . , Jm) , (14 w,~(k+1)=Col(w,~(k+1),j=1,2,...,Jm), (15) w,l”(k + 1) = co1 (w&c + l), 1 = 1,2,. . . ) L”) , (16)and Jm and L” are, respectively, the number of lanes adjacent to blocked lane i and the number of independent lanes on link m. Note that Rxj and Sltx, shown in equation (3) represent the time-varying decision variables associated with phase X under which the traffic movements in adjacent lane j and independent lane 1 are permitted at time step k, respectively. Similarly, the LX,“=, (3nj”z
+ 4’71 x E,“=,
(3nj”+ $-?I d’ g
la onal noise matrix L[z(k), flA(k), k] can be further expressed asL kdk), S-h(k),
kl
=Dia ( e~~(k),e~~(k),e~~(k),~~~(k), m=1,2 ,..., M; j=l,2 ,..., Jm; 1=1,2 ,..., em), (17)
where the diagonal entries f$F (k), f$L (k), t>? (k), and l::(k) take, respectively, the following forms:
Measurement Equations
The measurement equations are derived using the time-varying relationships between the spec- ified state variables and the traffic measurements. In the proposed process of real-time signal control, these equations are used to update the prior predictions of the basic lane trafhc states. The computational steps of the proposed control algorithm are detailed in the following section. The generalized form of the measurement equations is expressed as
Z(k) = h b+), kl + v(k), (22)
where Z(k) is a [cf=, (njm + nr)] x 1 time-varying measurement vector; h[s(k), k] is a
rc,“=, bjm + V>l x 1 t
ime-varying vector which expresses the relationships between the mea- sured lane traffic counts and the basic lane traffic states; and v(k) is a [cE=, (ny + nr)] x 1 Gaussian vector which represents the error terms of the collected traffic counts at time step k. Z(k), %447 4, and u(/c) are given, respectively, byZ(k) = co1 @j”(k), zl”(k), m = 1,2,. . . ) M) ) (23) h [z(k), k] = Co1 (h?(k), h?(k), m = 1,2,. . . , M) , (24) w(k) = Co1 (v?(k), VP(~), m = 1,2,. . . , M) , (25) where zjm(k) = co1 (zjm(k), j = 1,2,. . . , J”) ) zl”(k) = co1 (z?(k), 1 = 1,2,. . *, L”) , hj”(k) = Co1 (by(k), j = 1,2,. . . , J”) , hi”(k) = Col(hZ”(lc), 1 = 1,2,. . . , L”) , VT(k) = co1 (VT(k), j = 1,2,. . . , J”) , vi”(k) = Col(vT(k), 1 = 1,2,. . . ) Lm) ) (26) (27) (28) (29) (30)
Herein, z?(k) and zr (k) correspond to the lane traffic counts collected from the downstream detectors, respectively, in adjacent lane j and independent lane 1 on link m at time step k; w?(k) and VT(~) are the Gaussian error terms associated with z?(k) and z?(k), respectively; h?(k)
and hr (k) denote the components of zy (k) and z?(k) , respectively, and can be further expressed as
hj”(k) = {(UT(~) + 62”(k - 1)) x p;(k) x r;(k) + [(ajm(lc) + 6j”(k - 1)) x r,m(k)]} , (32)
hi”(k) = [az”(k) + 6f”(k - l)] x r?(k), (33) where ay(lc), ajm(lc), and a?(k) represent the lane traffic counts collected from the upstream detectors in blocked lane i, adjacent lane j, and independent lane I, respectively, at time step k. Boundary Constraints
In order to yield feasible solutions efficiently in the procedures of real-time estimation of system states, four boundary conditions are incorporated in the proposed model, and are denoted by four boundary constraints. The generalized forms of the boundary constraints are shown as follows:
0 I X(k + 1) 5 1, (34)
0 I %(k) 5 1, VA, (35)
T g,min I 2 [fltx(k + E) X tl I Tgpnax, (36) E=O
where X(k + 1) represents, as indicated by equation (2), the vectors of basic lane traffic states; Rx(k), as defined previously, is a time-varying decision variable associated with a given phase A; 72~ is the total number of the sequential time steps which belong to a given phase A; t is the length of a unit time step; T’,min and Ts,max represent the minimum and maximum intervals of green time preset in any given phase, respectively.
3. REAL-TIME
CONTROL
ALGORITHM
The proposed incident-responsive local signal control approach serves mainly to minimize in- cident impact on the stability of basic lane traffic states in a given detection zone where a lane-blocking incident occurs, and correspondingly, to minimize the differences between the ideal and the estimated values of the basic lane traffic states. Herein, the ideal value of a state variable corresponds to the target value associated with the given state variable that can reduce incident impacts to the greatest extent. Therefore, we formulate the objective function (<) as
< = minE 2 [X(k) - X*(k)IT Qr(k) [X(k) - X*(k)]
k=O
+ h-V+- fl*(k>IT Qz(k) D-W - fl*(k)l ,
(37)
where &l(k) and &2(k) re resent the [c,“=, P (3ny + n?)] x [c,“=, (37~7 + nr)] time-varying
diagonal, positive-definite weighting matrix associated with the estimation vector of the basic lane trafhc states (X(k)), and that associated with the estimation vector of the decision variables (R(k)), respectively; N corresponds to the incident duration in the unit of time step, and is predetermined in the proposed method; theoretically, N can be estimated via other external technologies such as incident prediction models (i.e., methods used to characterize incidents), and practically, the condition that the estimate of N is greater and equal to its real value should hold in the optimization process; X*(k) and a*(k) are the time-varying target vectors associated with X(k) and n(k), respectively.
To execute the mechanism of real-time incident-responsive local signal control, a stochastic optimal control based algorithm is developed. The primary computational steps involved in the proposed algorithm include:
(1) the extended Kalman filtering process, (2) truncation and normalization,
(3) incident impact prediction, and
(4) calculation of time-varying decision variables.
The following steps summarize the proposed recursive estimation logic.
STEP 0. Initialize system states and input the raw trafFic data. Given k = 0, states including: (1) the basic lane traffic states X(0 ] 0),
(2) the covariance matrix of the state estimation error cP(0 ] 0), the weighting matrices Qt” (0) and Q;*(O), and the incident-impact variables (i.e., q?(O), q?(O), q?(O), by(O), and Sl”(O)) are initialized.
In addition, let the phase with green time (A’) be assigned to the lane group which involves blocked lane i by setting fix*(O) = t. Note that the total number of phasing (8) together with lane groups associated with the specific phases are herein predetermined as well.
STEP 1. Compute prior estimates of basic lane traffic state variables (X(k + 1 1 k)) and the covariance matrix of the state estimation error (@(k + 1 ] k)), respectively, by
X (k + 1 I k) = f k(k), f&t*(k), kl i (38) @ (k + 1 I k) = F(k)@@ I WT(k) + L [x(k), h(k), kl Q:‘(W [z(k), h*(k), JCIT , (39)
where matrix FT(k)is the transpose matrix of F(k); F(k) is given by
STEP 2. Calculate the Kalman gain by
K(k + 1) = @(k + 1 ) k)HT(k + 1) [H(k + l)+(k + 1 j k)HT(k + 1) + R(k + l)] -I > where R( k + 1) see footnote 2 is the covariance matrix of v(k+l); H(k+l) is denoted by
H(k+l) = dh [x (k + 1 ( k) , k + 11 aX(k+l] k)
STEP 3. Update the prior estimates of the basic lane traffic states (X(k + 1 / k -+ 1)) by
X(k+l
] k+l)=X(k+l ] k)+K(k+l)AZ(k+l / k),where AZ(k+l( k) is given by
AZ(k+l) k)=Z(k+l)-h[z(k+l ] k),k+l].
(41)
(42j
(43)
(44)
STEP 4. Truncate the estimates of basic lane traffic states variables by employing boundary constraints3.
STEP 5. Normalize the updated estimates of mandatory lane-changing fractions of blocked lane i
p;(k + 1) =
p;(k+l / k+l)l&?$(k+1
I k+1)
3
such that c p;(k+l) 5 1. (46) (45)STEP 6. Update the covariance matrix of the state estimation error (@(k t 1 I k + I)) as i9 (k + 1 I k + 1) = [I - K (k + 1) H (k + l)] i9 (k + 1 I k) . (47)
STEP 7. Update space-based incident impact using the estimates of basic lane traffic states at the end of time step k+l by
qz”(k + 1) = [qy(k) + ay(k + l)] x 1 - 1 p;(k + 1)
VjCJ-
1
, (48)
qjm(k + 1) = qjm(k) + $‘(k + l), (49) ql”(k + 1) = qr(k) + aI”(k + l), (50) 6jm(k + 1) = [by(k) + ay(k + l)] x p;(k + 1) x [l - .$(I, + l)]
+ [by(k) + ay(k + l)] x [l - rjm(k + l)] , (51) 6Y(k + 1) = [&l”(k) + al”(k + l)] x [l - rY(k + 1)] . (52)
STEP 8. Determine the permitted phase X* (i.e., the phase is assigned with the calculated green time), and associate X* with the time-varying weighting matrix Ql(k + 1) (i.e., Qf*(k + 1)). In this step, the total queue length of each lane group associated with a given phase X (i.e., the sum
2The measurement error covariance matrix (i.e., R(k + 1) shown in equation (41)) refers to the covariance matrix of v(k + 1). Correspondingly, elements of R(k + 1) represent the errors of traffic measurements, and thus, can be predetermined using the historical traffic data.
3The state variables of a nonlinear stochastic system estimated using an extended Kalman filter may approximate to real values such that the mean square error of the estimation is minimized. However, the estimates of state variables are valid only when they are located within the range between their upper and lower bounds. Therefore, the truncation and normalization procedures are executed to address the boundary issue.
of qzTx (k + l), qzx (k + l), and qzx (k + 1)) is calculated. Qt* (k + 1) and X* are then determined by the following rule4:
a:*(k+l) 0 Q:*(k + 1) =
I.
0” 0 0 0 . . . o:*(k+l) 0 0 . * . 0 &k+1) 0 . . . ’ 0’ . .
0 a;‘(k+l) ... *. L: where at’ (k -/- 1)is given byc c c Q~~‘(k+l)+q~~*(k+l)+q~~*(k+l) g;*(k + pmax v*x* tJj,* Vlx*
X=1 Vnx vj,$ Vl,J c k1,2,...,8
(53)
1
. (54
STEP 9. Calculate the decision-variable vector R(k+l). According to the principles of stochastic optimal control, the estimates of the basic lane traffic states (X(k + 1 1 k + 1)) produced by the extended Kalman filter are fed back through the optimal gain matrix E(k + 1) to minimize the prespecified cost function by
R(k + 1) = -E(k + l)X(k + 1 ) k + 1) + <(k + 1).
(55)
In equation (55), E(k + 1) and [(k + 1) are denoted, respectively, by
E(k + I) = [BT(k + l)S(k + 2)B(k + 1) + Q;*(k + l)]-1 BT(k + l)S(k + 2)Wk + l), (56)
E(k + 1) = [B’(k + l)S(k + 2)B(k + 1) + Q;‘(k + I)] -I
x [B(k + l)Q:*(k + l)X*(k + 1) + Q;*(k + l)s2*(k + l)] , where matrix S(k + 2) should satisfy the Riccati equation shown as follows:
(57)
S(k+1)=Q~*(k+1)+FT(k+1)S(k+2)F(k+1)-FT(k+1)S(k+2)B(k+1)E(k+1), (58) and matrix B(k + 1) can be further expressed as
B(k + 1) = ‘f Ix(‘), Ri(k), ‘1
aw>
STEP 10. Check the current phase associated with green time X* using the boundaries of
the minimum and maximum green time intervals (Z’g,min and Z’s,max) as follows: if the sum of the green time associated with phase X* is less than the minimum green time Tg,min (i.e.,
4The major purpose of equation (54) is used to determine which phase should be assigned with the calculated green time in the current time step. According to the properties of the objective function presented in the control algorithm, the tentative permitted phase should be sssigned to the phase which potentially causes the highest effect on the system performance. Herein, we think that such an effect may depend on the ratio of the number of queuing vehicles in the corresponding phase X’ to the sum of queuing vehicles potentially presented in all other lane groups at a given time step. Correspondingly, queuing vehicles are regarded as the major source of incident impacts on traffic congestion, Therefore, they are further employed to quantify the time-varying weights of the objective function and to determine the permit&l phase. Please also note that once the permitted phase is determined, the corresponding control variable (i.e., the corresponding green time) is calculated using stochastic optimal control theories. Then, the determined permitted phase and corresponding green time are employed in the following time step for the routine of the incident-responsive signal control.
[cfze Rx* (k - r)] x t < Tg,min), then let [Czo Rx* (Ic - r)] x t = Tg,min, and assign the rest of the green time at a given time step to the lane group with the second-worst traffic congestion by using equation (54); if [alto Rx* (k - T)] x t > Tg,maxr then let [C”;zo Rx* (k - r)] x t = Ts,max, and similarly assign the rest of the green time at the given time step to the lane group with the second-worst traffic congestion. Herein, kx. represents the time step that the phase X* starts with, and T is a time-lag index.
STEP 11. Check incident status by conducting the following rules.
If the incident is removed (i.e., Ic is equal to N), then stop the control algorithm5. Otherwise, input the next-time-step raw traffic data; let the time step index k = k + 1, and then go back to Step 1 to continue the control algorithm.
Through the proposed stochastic optimal control based algorithm, the time-varying state vari- ables are updated in real time using prior predictions of state variables and real-time traffic measurements, both of which are characterized by equations (38) and (44), respectively, In real- ity, these equations are also based on the recursive equations and measurement equations of the proposed stochastic model, as described previously. Therefore, we can determine the real-time state vector X(k + 1 ] k + 1) (i.e., equation (43)) a each time step. According to the principles t of Kalman filtering techniques, the system states derived using Kalman filtering are minimum mean square estimates satisfying the requirements of the preset objective function shown in equation (37), and thus, are applicable for further use of incident-responsive signal control.
4. NUMERICAL
STUDY
This numerical study investigates the potential advantages of the proposed signal control method with respect to responding, in real time, to diverse incident-induced traffic congestion problems. In addition to verifying the performance of the proposed incident-responsive control method, testing the capability of the proposed stochastic model in terms of estimating valid incident-induced traffic states is also important. Because related studies have been completed elsewhere [14,15], the following focuses primarily on presenting our preliminary evaluation of system performance in incident-responsive local signal control.
In view of the difficulty in collecting enough real incident-related traffic data for diverse incident cases, we utilized simulation data generated from Paramics, Version 3.0 which is a microscopic traffic simulator increasingly used for modeling and analyzing traffic maneuvers under ITS con- ditions. Efforts spent in evaluating, qualitatively and quantitatively, the Paramics simulator can be found in our earlier related research [16]. Furthermore, the Paramics programmer which is an application programming interface (API) in aid of traffic modeling was used as an assistant tool for generating as well as collecting time-varying lane traffic data under conditions of diverse lane-blocking incident events.
A simple trafhc network comprising five intersections was simulated via Paramics for simulation data generation. Figure 2 illustrates graphically the scheme of the study network, where each intersection represented conveniently by a specific node is coded with an integer value for its identification. Herein, Node 3 is referred to as the targeted intersection, where five lanes including three through lanes, one exclusive right-turn lane, and one exclusive left-turn lane are associated with each approach of the targeted intersection. Lane-blocking incidents were mainly simulated ‘The proposed stochastic model aims to capture incident-induced mandatory lane-changing maneuvers (from the blocked lane to given adjacent lanes) upstream from the incident site. Then, the corresponding lane traffic state variablea and control variables are estimated using the proposed algorithm in response to diverse incident impacts. Once the incident is removed from the blocked lane, the aforementioned incident-induced mandatory lane changing maneuvers and corresponding lane traffic states may turn out to be insignificant. Accordingly, our model may no longer be applicable for the estimation of lane traffic states in case that incident-induced mandatory lane changes do not exist. In contrast, other existing signal control strategies can be resumed for such incident-free congestion cases. Therefore, the measure we really suggest is that once the incident is fully removed at the current time step, the proposed incident-responsive signal control mode can be switched to any other suitable modes from the next time step to continue incident-free signal control.
Figure 2. The scheme of the simulated network
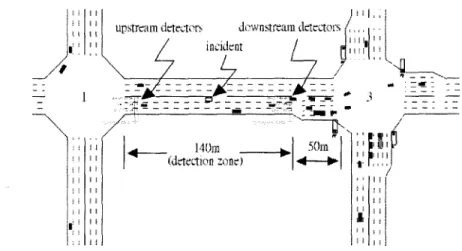
Figure 3. Illustration of simulated lane-blocking incidents in the detection.
in a given detection zone which is located on the 3-lane roadway between Nodes 1 and 3, as can be seen in Figure 3. The primary parameters set for simulation are summarized in Table 2. The output data obtained from Paramics, including lane traffic counts, lane-changing fractions, and queue lengths were collected at each 10 sec. time step.
A total of 27 lane-blocking incident cases associated with diverse incident position on the link, the lanes blocked, and traffic flow conditions were simulated in the study. Herein, the simulation time for each incident event was set to be 30 minutes, including the first 5 minutes for warming up, the next 20 minutes for incident duration, and the rest for incident removing. Table 3 summarizes the characteristics of the simulated incidents designed in the numerical study.
To measure the system performance with r,espect to the improvements in reducing incident impact, three time-varying system-evaluation measures including AD(k), SQ(k), and SP(lc) are specified. Wherein, AD(k) refers to the average vehicular delay at a given time step Ic during a given incident; in contrast, SQ(k) and SP(k) are two space-based incident-impact indexes, and
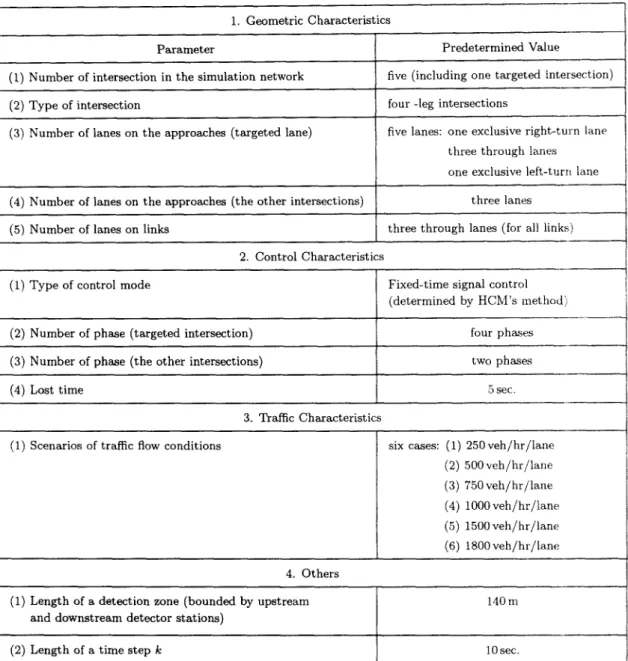
Table 2. Summary of the primary parameters of simulation.
1. Geometric Characteristics Parameter
(1) Number of intersection in the simulation network (2) Type of intersection
(3) Number of lanes on the approaches (targeted lane)
Predetermined Value five (including one targeted intersection) four -leg intersections
five lanes: one exclusive right-turn lane three through lanes
one exclusive left-turlr lane (4) Number of lanes on the approaches (the other intersections) three lanes
(5) Number of lanes on links three through lanes (for all links) 2. Control Characteristics
-___I (1) Type of control mode Fixed-time signal control
(determined by HCM’s method) (2) Number of phase (targeted intersection) four phases
-I___ (3) Number of phase (the other intersections)
(4) Lost time
3. Traffic Characteristics
two phases 5 sec.
.____
(1) Scenarios of traffic flow conditions
4. Others
six cases: (1) 250 veh/hr/lane (2) 500veh/hr/lane (3) 750veh/hr/lane (4) lOOOveh/hr/lane (5) 1500veh/hr/lanr (6) 1800veh/hr/lane
(1) Length of a detection zone (bounded by upstream and downstream detector stations)
140 m
(2) Length of a time step k IOsec.
the corresponding notations are given, respectively, by
SQ(k) = F 5 [bj”(” - 1) - r,“(k) x [“j”(k) + S,“(k - l)]]
m=l j=l
+E [cyyk - 1) - rl”(k) X [q(k) + Sl”(k - l)]] :
I=1 3
SP(k) = $$ x lOO%,
where A(k) represents the sum of lane traffic counts collected at the upstream detector station at time step lc.
In addition to using the above measures to assess the system performance under the proposed incident-responsive signal control, these measures were further compared with simulations under fixed-time signal control employing Paramics by the measure: (l?fiX - lT’inc)/F’cx x 100% to indicate
Table 3. Characteristics of simulated incidents. Spatial Characteristics of Incidents Traffic Characteristics
of Incidents (veh/hr/ln) Inside Lane (I) Central Lane (C) Outside Lane (0)
I-U-250 C-U-250 O-U-250
250 I-M-250 C-M-250 0-M-250
I-D-250 C-D-250 0-D-250
I-U-500 c-u-500 o-u-500
500 I-M-500 C-M-500 0-M-500
I-D-500 C-D-500 0-D-500
I-U-750 c-u-750 o-u-750
750 I-M-750 C-M-750 0-M-750
I-D-750 C-D-750 0-D-750
1-u-1000 c-u-1000 0-u-1000
1000 I-M-1000 C-M-1000 0-M-1000
I-D-1000 C-D-1000 0-D-1000
I-U-1500 c-u-1500 o-u-1500
1500 I-M-1500 C-M-1500 0-M-1500
I-D-1500 C-D-1500 0-D-1500
I-U-1800 C-U-1800 O-U-1800
1800 I-M-1800 C-M-1800 0-M-1800
I-D-1800 C-D-1800 0-D-1800
U: upstream; M: mid-stream; D: Downstream
the relative improvements in reducing incident impacts, where Fax and frnc represent the average values of a given incident-impact index under fixed-time control and incident-responsive control, respectively. Note that the fixed-time control mode is implemented extensively in the urban areas of Taiwan, and thus, used in this scenario to evaluate the relative performance of the proposed method. The results of the comparisons are summarized in Table 4.
Overall, the comparison results summarized in Table 4 revealed a certain level of improvement in alleviating incident-induced traffic congestion that can be achieved via the proposed incident- responsive local signal control method in comparison with the fixed-time control mode currently implemented at the study site. Such a potential advantage of the proposed control method has been reflected herein in terms of the space-based incident-impact indexes that denote the number of vehicles either queuing or moving interruptedly through the incident site. In reality, the generalization is not surprising because the proposed control method accommodates, in real time, signal timing to the time-varying estimates of section-wide interlane and intralane traffic states; by contrast, the preset optimal timing plans of the fixed-time control mode rely, to a great extent, on the historical traffic data which are definitely not able to reflect in real time the abnormal changes in traffic flow patterns in the presence of a lane-blocking incident.
In addition, several findings observed in the aforementioned preliminary tests are provided for further discussion as follows.
First, the proposed incident-responsive control method appears to perform relatively better under low-volume traffic conditions than under high-volume conditions. One major reason in- ferred from the generalization can be that under low-volume traffic conditions, vehicles queuing in blocked lanes may conduct lane changing more easily than that in high-volume cases during the phase with green time. As a consequence, the green time dynamically assigned from the proposed control strategy can benefit significantly these queuing vehicles with the gain of passing by the incident site efficiently by means of mandatory lane changing. In contrast, the strate-
Table 4. Comparisons of system performance (incident-responsive control vs. fixed- time control). Traffic Characteristics of Incidents (veh/hr/ln) 250 500 750 1000 1500 1800 Control Technology
Averaged Values of System- Evaluation Measures m(k) q(k) z(k) Fixed-time incident-responsive relative improvement (%) Fixed-time incident-responsive relative improvement (%) Fixed-time incident-responsive relative improvement (%) Fixed-time incident-responsive relative improvement (%) Fixed-time incident-responsive relative improvement (%) Fixed-time incident-responsive relative improvement (%) 22.05 8.14 38.89 16.65 5.32 29.07 24.49 34.64 25.43 24.14 16.07 39.39 23.95 13.74 35.24 7.87 14.50 10.54 30.04 24.61 43.76 25.13 23.35 41.99 19.54 5.12 4.04 26.45 28.32 48.35 25.45 24.69 43.27 3.78 12.82 10.51 25.64 28.75 48.29 25.89 23.91 41.91 -1.32 16.83 13.21 25.12 28.75 48.60 25.89 24.32 42.24 -3.06 15.41 13.09 - gic increase in green time under high-volume conditions may not provide the effect on traffic alleviation similar to that under low-volume cases.
Second, responding to incident-induced traffic congestion right after the occurrence of a lane- blocking incident remains to be a critical stage for the development of real-time incident manage- ment systems. It is worth mentioning that in the aforementioned numerical studies, the proposed methodology is evaluated under the condition that perfect incident-related information including the onset of incident occurrence is given. Nevertheless, incident response time remains to be a critical factor in determining the performance of the proposed control method. Therefore, it is important, from a practical point of view, to integrate the proposed incident-responsive control method with real-time incident detection algorithms to implement real-time incident manage- ment. Such elaborate integration appears to be particularly vital under high-volume incident conditions.
Third, the improvements in terms of the averaged delays under high-volume incident conditions are quite limited, according to the corresponding results of AD(k) presented in Table 4. It is induced that isolated signal control may no longer be suitable for high-volume incident cases. Accordingly, coordination of upstream and downstream signal control modes for high-volume incident cases may warrant further research.
Fourth, the potential advantage of the proposed control method in terms of real-time charac- terization of incident effects on lane traffic states as well as traffic congestion is worth mentioning in the evaluation of system performance. Compared to other published traffic control modes, the proposed control method has apparently exhibited its unique and independent capability in terms of monitoring in real time incident-induced trafhc congestion in the process of real-time signal control without needing another assistant technology such as image processing systems.
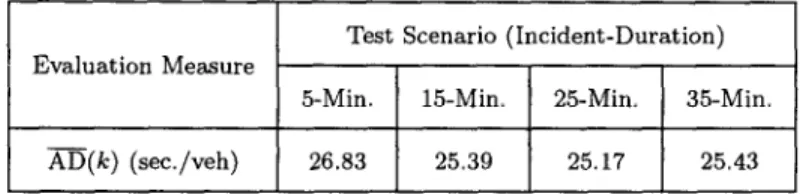
TO further explore the effect of incident duration on the system performance, a simple sen- sitivity analysis was carried out through testing the proposed method in four different incident duration scenarios, including 5-minute, 15-minute, 25-minute, and 35-minute cases. Wherein, AD(k) remains used as the evaluation measure in these tests. Given the prespecified input data and calibrated parameters, the corresponding measures of AD(lc) obtained in the four incident- duration cases were collected, and summarized in Table 5.
Overall, the numerical results shown in Table 5 imply that the factor of incident duration does not seem to have a significant effect on the system performance. As can be seen in Table 5,
-
there is no significant change in terms of the evaluation measure (AD(k)) in these diverse incident- duration scenarios. According to our observations in these tests, overall the time-varying patterns of lane traffic states, e.g., mandatory lane changes, and queue lengths, can be readily captured using the proposed stochastic model in a very short-term time less than 1 minute (i.e., six time steps). Once the time-varying state patterns are captured appropriately, the induced incident impacts are under control following the goal, as specified in the objective function. Therefore, it is induced that the problem of control divergence in system performance may not exist in the proposed control algorithm.
Table 5. Results of sensitivity analysis in terms of incident duration. Test Scenario (Incident-Duration)
5. CONCLUSIONS
AND RECOMMENDATIONS
This paper has presented a stochastic optimal control-based method in response to lane- blocking incidents on arterials of surface streets. The proposed control approach performs incident-responsive traffic signal control by minimizing a time-varying function cost which is measured on the basis of the variations in the real-time estimates of interlane and intralane trafhc states in comparison with their ideal values. To accomplish the goal via the proposed control method, we specified three groups of time-varying system states, and then, constructed a discrete-time nonlinear stochastic model as well as a real-time signal control algorithm.
Our preliminary test results have revealed the applicability of the proposed method to real- time local signal control for lane-blocking arterial incidents. Analysis results presented in the numerical study have also suggested the relative advantages of the proposed control method compared with the specified fixed-time optimal trafhc signal control. Moreover, the proposed approach has also indicated its unique capability in terms of characterizing incident-induced lane trafFic states together with incident impact in real time in the process of real-time signal control. In contrast, such a function is not found in other published advanced traffic control systems for incident management.
Despite the potential advantages mentioned above, further tests as well as modifications may be needed to verify the robustness of the proposed incident-responsive control method, and its applicability to diverse incident cases on surface streets. Other scenarios such as multi- lane-blocking incidents, gridlock events, and incidents occurring within intersections apparently warrant more research. Further comparisons with other advanced signal control algorithms on the same basis of incident-induced traffic congestion can also help to demonstrate the potential advantages of the proposed method. Efforts on either integrating the proposed control method with automatic incident detection (AID) systems or extending it for network-wide system optimal control seem urgently needed for the development of advanced incident management systems.
REFERENCES
1. J.-B. Sheu and S.G. Ritchie, Stochastic modeling and real-time prediction of vehicular lane-changing behavior, Transportation Research Part B 35B (7), 695-716, (2001).
2. G. Scemama, CLAIRE: An independent AI-based supervisor for congestion management, Traffic Engineering and Control, 604-612, (1995).
3. D. Bretherton, K. Wood and K. Baker, Congestion and incident management using the SCOOT UTC system, Presented at Road Tkansport Information and Control, IEE London, November 2000.
4. J. Eddelbuttel and M. Cremer, A new algorithm for optimal signal control in congested networks, Journal of Advanced Transportation 28 (3), 275-297, (1994).
5. M. Cassidy, Y.-H. Chuang, and J. Vitale, Reexamining vehicle-actuated strategies at isolated signalized intersections, Journal of Transportation Engineering 122 (3), 235-240, (1996).
6. G. Abu-Lebdeh and R. Benekihal, Development of a traffic control and queue management procedure for oversaturated arterials, Presented at nansportation Research Board Annual Meeting, Washington D.C., January, 1997.
7. H.K. Lo, A Novel traffic signal control formulation, Transportation Research Part A 33A (6). 433-448. (1999).
8. T.-H. Chang and J.-T. Lin, Optimal signal timing for an oversaturated intersection, Transportation Research
Part B 34B (6), 471-491, (2000).
9. N.W. Hat-wood, Incident management using MOLA, Presented at Dynamic Control of Stratqic Inter-Urban
Road Networks, IEE, London, November 2000.
10. S. Subramaniam, G. Hobeika and D. Schierer, A new hybrid expert-GIS for wide-area incident management, Proceedings of the IEEE International Conference on humans, Information and Technology 2, !71O-1715, (1994).
11. M.M. Trivedi, I. Mikic and G. Kogut, Distributed video networks for incident detection and management, Proceedings of the IEEE Intelligent Transportation Systems Conference, Dearborn, MI, pp. 155-160, (2000). 12. R.F. Stengel, Stochastic Optimal Control Theory and Application, Wiley, New Jersey, (1986).
13. M.S. Santina, A.R. Stubberud and G.H. Hostetter, Stochastic systems and recursive estimation, In Digital Control System Design, (Edited by M. S. Santina et al.), pp. 58&679, Saunders College Publishing, Harcourt Brace College Publishers, San Diego, CA, (1994).
14. J.-B. Sheu, Stochastic estimation of lane-changing probabilities and its application to incident detection, Ph.D. Thesis, University of California, Irvine, CA, (1997).
15. J.-B. Sheu and S.G. Ritchie, A new methodology for incident detection and characterization on surface streets, Transportation Research Part C 6C (5/6), 315-335, (1999).
16. B. Abdulhai, J.-B. Sheu, and W.W. Reeker, Simulation of ITS on the Irvine FOT area using the ‘Paramics 1.5’ scalable microscopic traffic simulator: Phase I: Model calibration and validation, California PATH Research Report UCB-ITS-PRR-99-12, 1055-1425, (1999).