544 IEEE SYSTEMS JOURNAL, VOL. 3, NO. 4, DECEMBER 2009
Design of Robust Quadratic Finite-Horizon Optimal
Static Output Feedback Controllers for Linear
Uncertain Singular Systems
Shinn-Horng Chen, Wen-Hsien Ho, and Jyh-Horng Chou, Senior Member, IEEE
Abstract—By complementarily fusing the robust stabilizability
condition, the orthogonal-functions approach (OFA) and the
hy-brid Taguchi-genetic algorithm (HTGA), an integrative method is
proposed in this paper to design the robust-stable and
quadratic-optimal static output feedback controller such that i) the linear
singular control system with structured parameter uncertainties is
regular, impulse-free and asymptotically stable and ii) a quadratic
finite-horizon integral performance index for the linear nominal
singular control system can be minimized. Based on some essential
properties of matrix measures, a new sufficient condition is
pre-sented for ensuring that the linear singular system with structured
and quadratically-coupled structured parameter uncertainties is
regular, impulse free and asymptotically stable. By using the OFA
and the robust stabilizability condition, the dynamic-optimization
problem for the robust-stable and quadratic-optimal static output
feedback control design of the linear uncertain singular system is
transformed into a static-constrained-optimization problem
repre-sented by the algebraic equations with constraint of robust
stabi-lizability condition; thus greatly simplifying the robust-stable and
quadratic-optimal static output feedback control design problem
of the linear uncertain singular system. Then, for the
static-con-strained-optimization problem, the HTGA is employed to find the
robust-stable and quadratic-optimal static output feedback
con-troller of the linear uncertain singular control system. One design
example of the robust-stable and quadratic-optimal static output
feedback controller for a mass-spring-damper mechanical system
with structured parameter uncertainties is given to demonstrate
the applicability of the proposed integrative approach.
Index Terms—Robust stabilizability, singular systems, static
output
feedback
control,
parameter
uncertainties,
orthog-onal-functions approach, genetic algorithm.
I. I
NTRODUCTIONI
N recent years, there has been a growing interest in the
system-theoretic problems of singular systems due to
the extensive applications of singular systems in large-scale
Manuscript received November 30, 2008; revised September 23, 2009. First published December 15, 2009; current version published January 27, 2010. This work was supported in part by the National Science Council of Taiwan under Grants NSC 96-2221-E-151-055, NSC 96-2628-E-327-004-MY3, and NSC 97-2221-E-037-003.
S. H. Chen is with the Department of Mechanical Engineering, National Kaohsiung University of Applied Sciences, Kaohsiung City, Taiwan.
W. H. Ho is with the Department of Medical Information Management, Kaoh-siung Medical University, KaohKaoh-siung City, Taiwan (e-mail: whho@kmu.edu. tw).
J. H. Chou is with the Institute of System Information and Control, National Kaohsiung First University of Science and Technology, Kaohsiung City, Taiwan (e-mail: choujh@ccms.nkfust.edu.tw).
Digital Object Identifier 10.1109/JSYST.2009.2037358
systems, circuits, power systems, economics, control theory,
robots, mechanical systems, and other areas [1], [2]. Recently,
several results and methods for the analysis and design of linear
singular control systems have been presented in the literatures
(see, for example, [1]–[10] and references therein). On the
other hand, it is well-known that an approximate system model
is always used in practice and sometimes the approximate error
should be covered by introducing parameter uncertainties in
control system analysis and design. Besides, in practice, it is
not always possible to have full access to the state variables
and only the partial information through a measured output is
available. Therefore, the study on the analysis and design of
linear uncertain singular systems with static output feedback
control is more realistic in control engineering. The complexity
of the static output feedback control problem has been proved
to be NP-hard [11]. Geromel et al. [12] have analyzed the
solv-ability of a necessary and sufficient condition for the existence
of a stabilizing static output feedback gain for continuous-time
linear systems. They have also provided simple procedures to
determine a suboptimal solution to the
control problem by
means of static output feedback control [12]. In recent years,
there are a few works studying the robust stability and
stabi-lizability problems for the linear uncertain singular systems
with static output feedback control in the literatures [4], [6],
[13]–[18]. Only robust stabilization is often not enough in
con-trol design. For the concon-trol systems design, it is often of interest
to synthesize a quadratic-optimal controller such that the
con-trol objective of minimizing a quadratic finite-horizon integral
performance criterion is achieved [19], [20]. However, to the
authors’ best knowledge, there are no literatures to investigate
the issue of designing the robust-stable and quadratic-optimal
static output feedback controllers for the linear uncertain
singular systems, where a quadratic finite-horizon integral
performance index is minimized.
The purpose of this paper is to propose an integrative
opti-mization method to design the robust-stable and
quadratic-op-timal finite-horizon static output feedback controller such that
i) the linear singular systems with structured parameter
uncer-tainties is regular, impulse-free and asymptotically stable and
ii) a quadratic finite-horizon integral performance index for the
linear nominal singular control system can be minimized. The
proposed integrative method complementarily fuses the
orthog-onfunctions approach (OFA), the hybrid Taguchi-genetic
al-gorithm (HTGA) and the robust stabilizability condition, where
the robust stabilizability condition is derived in this paper for
ensuring that the linear uncertain singular control system is
CHEN et al.: ROBUST QUADRATIC FINITE-HORIZON OPTIMAL STATIC OUTPUT FEEDBACK CONTROLLERS 549
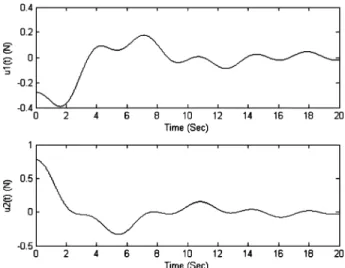
Fig. 2. Control forces of the designed example.
Remark 3: For some engineering problems, the performance
of finite-time horizon is considered for the performance
require-ment of both transient and steady-state responses [19]. In
gen-eral, the optimal linear-quadratic control over a finite-horizon
requires a time-varying feedback gain matrix
. It is not easy
to obtain and to implement the time-varying feedback gain
ma-trix
. But, by using the proposed integrative method, the
designed robust optimal quadratic finite-horizon static output
feedback controller having constant gain can be easily obtained
and implemented.
V. C
ONCLUSIONThe robust-stable and quadratic-optimal static output
feed-back control problem of the linear uncertain singular control
systems has been investigated in this paper. By using the OFA,
an algebraic algorithm is presented in this paper to solve the
linear nominal singular feedback dynamic equation. Then, the
presented algebraic algorithm is complementarily fused with
the HTGA to design the robust-stable and quadratic-optimal
static output feedback controller of the linear uncertain singular
system such that the control objective of directly minimizing a
quadratic integral performance index subject to the constraint
of robust stabilizablity criterion can be achieved. The quadratic
integral performance index is also converted into the algebraic
form by using the OFA. Since, by using the OFA and the
proposed robust stabilizablity criterion, the
dynamic-opti-mization problem for the robust-stable and quadratic-optimal
static output feedback control design of the linear uncertain
singular control system can be replaced by a
static-param-eter-constrained-optimization problem represented by the
algebraic equations with constraint of robust stabilizablity
criterion, and since the proposed algorithm only involves the
algebraic computation, the design procedures of robust-stable
and quadratic-optimal static output feedback controller for the
linear uncertain singular system may be either greatly reduced
or much simplified accordingly. Therefore, this proposed
inte-grative approach facilitates the design task of the robust-stable
and quadratic-optimal static output feedback singular control
system. The illustrative example regarding control problems of
two DOF uncertain mass-spring-damper mechanical system has
shown that the proposed integrative approach is effective for
designing the robust-stable and quadratic-optimal static output
feedback controller of the linear uncertain singular system.
A
CKNOWLEDGMENTThe authors thank the reviewers and the associate editor for
their constructive comments and suggestions.
R
EFERENCES[1] F. L. Lewis, “A survey of linear singular systems,” J. Circuit Syst.
Signal Process., vol. 5, pp. 3–36, 1986.
[2] L. Dai, Singular Control Systems. Berlin, Germany: Springer-Verlag, 1989.
[3] J. H. Chou and W. H. Liao, “Stability robustness of continuous-time perturbed descriptor systems,” IEEE Trans. Circuits Syst. I, vol. 46, no. 9, pp. 1153–1155, Sep. 1999.
[4] J. L. Lin and S. J. Chen, “Robustness analysis of uncertain linear singular system with output feedback control,” IEEE Trans. Automat.
Control, vol. 44, no. 10, pp. 1924–1929, Oct. 1999.
[5] J. H. Chou and S. H. Chen, “Asymmetric sufficient condition for sta-bility robustness of singular systems with structured parameter uncer-tainties,” J. Math. Anal. Applicat., vol. 258, no. 1, pp. 171–182, June 2001.
[6] C. H. Kuo and C. H. Fang, “An LMI approach to admissibilization of uncertain descriptor system via static output feedback,” in Proc. Amer.
Control Conf., Colorado, USA, June 2003, pp. 5104–5109.
[7] P. C. Muller, “Optimal control of proper and nonproper descriptor sys-tems,” Arch. Appl. Mech., vol. 72, no. 11–12, pp. 875–884, Jun. 2003. [8] J. Stefanovski, “LQ control of descriptor systems by cancelling struc-ture at infinity,” Int. J. Control, vol. 79, no. 3, pp. 224–238, Mar. 2006. [9] C. Yang, Q. L. Zhang, Y. Lin, and L. Zhou, “Positive realness and absolute stability problem of descriptor systems,” IEEE Trans. Circuits
Syst. I, vol. 54, no. 5, pp. 1142–1149, May 2007.
[10] Z. M. Fu and S. M. Fei, “RobustH dynamic output feedback stabi-lization for a class of uncertain switched singular systems,” Acta
Auto-matica Sinica, vol. 34, no. 4, pp. 482–487, Apr. 2008.
[11] V. L. Syrmos, C. T. Abdallah, P. Dorato, and K. Grigoriadis, “Static output feedback—A survey,” Automatica, vol. 33, no. 2, pp. 125–137, Feb. 1997.
[12] J. C. Geromel, C. C. De Souza, and R. E. Skelton, “Static output feed-back controllers: Stability and convexity,” IEEE Trans. Automat.
Con-trol, vol. 43, no. 1, pp. 120–125, Jan. 1998.
[13] D. Wang and C. B. Soh, “On regularizing singular systems by decen-tralized output feedback,” IEEE Trans. Automat. Control, vol. 44, no. 1, pp. 148–152, Jan. 1999.
[14] R. Yu and D. Wang, “Algebraic properties of singular systems subject to decentralized output feedback,” IEEE Trans. Automat. Control, vol. 47, no. 11, pp. 1898–1903, Nov. 2002.
[15] R. Yu and D. Wang, “On impulsive modes of linear singular systems subject to decentralized output feedback,” IEEE Trans. Automat.
Con-trol, vol. 48, no. 10, pp. 1804–1809, Oct. 2003.
[16] X. Z. Dong and Q. L. Zhang, “RobustH control of singular systems with time-varying uncertainties,” J. Northeastern Univ., vol. 25, no. 2, pp. 110–113, Feb. 2004.
[17] M. Chadli, M. Darouach, and J. Daafour, “Static output stabilization of singular LPV systems: LMI formulation,” in Proc. 47th IEEE Conf.
Decision and Control, Cancun, Mexico, Dec. 2008, pp. 4793–4796.
[18] T. K. Liu, S. H. Chen, J. H. Chou, and C. Y. Chen, “Regional eigen-value-clustering robustness of linear uncertain multivariable output feedback PID control systems,” J. Franklin Inst., vol. 346, no. 3, pp. 253–266, Apr. 2009.
[19] B. Friedland, Control System Design: An Introduction to State-Space
Methods. New York: McGraw-Hill, 1986.
[20] G. C. Goodwin, S. F. Graebe, and M. E. Salgado, Control System
De-sign. Upper Saddle River, NJ: Prentice-Hall, 2001.
[21] D. M. Yang, Q. L. Zhang, and B. Yao, Descriptor Systems. Beijing, China: Science, 2004.
[22] C. A. Desoer and M. Vidyasagar, Feedback Systems: Input-Output
Properties. New York: Academic, 1975.
[23] S. H. Chen, W. H. Ho, and J. H. Chou, “Design of robust quadratic-op-timal controllers for uncertain singular systems using orthogonal func-tion approach and genetic algorithm,” Optim. Control Applicat. Meth., vol. 29, no. 5, pp. 373–391, Sept. 2008.
550 IEEE SYSTEMS JOURNAL, VOL. 3, NO. 4, DECEMBER 2009
[25] J. H. Chou and I. R. Horng, “Application of Chebyshev polynomials to the optimal-control of time-varying linear systems,” Int. J. Control, vol. 41, no. 1, pp. 135–144, Jan. 1985.
[26] W. H. Ho and J. H. Chou, “Shifted-Chebyshev-series solutions of Takagi-Sugeno fuzzy-model-based dynamic equations,” Math.
Comput. Simul., vol. 68, no. 4, pp. 309–316, May 2005.
[27] W. H. Ho and J. H. Chou, “Solution of time-varying TS-fuzzy-model-based dynamic equations using shifted Chebyshev series approach,”
Int. J. Syst. Sci., vol. 36, no. 12, pp. 767–776, Oct. 2005.
[28] W. H. Ho and J. H. Chou, “Design of optimal controller for Takagi-Sugeno fuzzy model based systems,” IEEE Trans. Syst., Man, Cybern.
A, vol. 37, no. 3, pp. 329–339, May 2007.
[29] W. H. Ho, J. T. Tsai, and J. H. Chou, “Robust quadratic-optimal control of TS-fuzzy-model-based dynamic systems with both elemental para-metric uncertainties and norm-bounded approximation error,” IEEE
Trans. Fuzzy Syst., vol. 17, no. 3, pp. 518–531, Jun. 2009.
[30] M. R. Hsu, W. H. Ho, and J. H. Chou, “Numerical solutions of time-varying TS-fuzzy-model-based time-delay dynamic equations via or-thogonal functions,” Int. J. Syst. Sci., vol. 38, no. 5, pp. 377–387, May 2007.
[31] M. R. Hsu, W. H. Ho, and J. H. Chou, “Stable and quadratic-optimal control for the TS-fuzzy-model-based time-delay control systems,”
IEEE Trans. Syst., Man, Cybern. A, vol. 38, no. 4, pp. 933–944, July
2008.
[32] S. Barnett, Matrix Methods for Engineers and Scientists. NewYork: McGraw-Hill, 1979.
[33] J. T. Tsai, T. K. Liu, and J. H. Chou, “Hybrid Taguchi-genetic algo-rithm for global numerical optimization,” IEEE Trans. Evol. Comput., vol. 8, no. 4, pp. 365–377, Aug. 2004.
[34] J. T. Tsai, J. H. Chou, and T. K. Liu, “Tuning the structure and param-eters of a neural network by using hybrid Taguchi-genetic algorithm,”
IEEE Trans. Neural Netw., vol. 17, no. 1, pp. 69–80, Jan. 2006.
[35] D. J. Inman, Vibration With Control, Measurement and Stability. En-glewood Cliffs, NJ: Prentice-Hall, 1989.
[36] A. Weinmann, Uncertain Models and Robust Control. New York: Springer-Verlag, 1991.
[37] J. H. Chou, S. H. Chen, and I. R. Horng, “Robust stability bound on linear time-varying uncertainties for linear digital control systems under finite wordlength effects,” JSME Int. J. Ser. C-Mech. Syst.,
Mach. Elements Manufact., vol. 39, no. 4, pp. 767–771, Dec. 1996.
[38] I. R. Horng, H. Y. Horng, and J. H. Chou, “Eigenvalue clustering in subregions of the complex-plane for interval dynamic systems,” Int. J.
Syst. Sci., vol. 24, no. 5, pp. 901–914, May 1993.
Shinn-Horng Chen received the B.S. and M.S.
degrees in mechanical engineering from the National Taiwan University of Science and Technology, Taipei, in 1987 and 1989, respectively, and the Ph.D. degree in mechanical and mechatronic engineering from the National Sun Yat-Sen University, Kaoh-siung City, Taiwan, in 1996.
He is currently a Professor of mechanical engi-neering with the National Kaohsiung University of Applied Sciences, Kaohsiung City, where he was a Professor and the Chairman with the Mechanical Engineering Department from October 2006 to July 2009. His research interests include the areas of robust control, vibration control, and optimal design.
Wen-Hsien Ho received the B.S. degree in marine
engineering from the National Taiwan Ocean Uni-versity, Keelung, Taiwan, in 1991, the B.S. degree in industrial and information management from the National Cheng-Kung University, Tainan, Taiwan, in 1998, and the M.S. degree in mechanical and automa-tion engineering and the Ph.D. degree in engineering science and technology from the National Kaohsiung First University of Science and Technology, Kaoh-siung City, Taiwan, in 2002 and 2006, respectively.
He is currently an Associate Professor with the Department of Medical Information Management, Kaohsiung Medical Uni-versity, Kaohsiung City. His research interests include intelligent systems and control, computational intelligence and methods, robust control, and quality engineering.
Jyh-Horng Chou (M’04–SM’04) received the B.S.
and M.S. degrees in engineering science from the National Cheng-Kung University, Tainan, Taiwan, in 1981 and 1983, respectively, and the Ph.D. degree in mechatronic engineering from the National Sun Yat-Sen University, Kaohsiung City, Taiwan, in 1988.
He is currently a Professor, the Vice President, and the Acting President of the National Kaohsiung First University of Science and Technology, Kaohsiung City, Taiwan. His current research interests include intelligent systems and control, computational intelligence and methods, au-tomation technology, robust control, and quality engineering. He is an Editorial Member or an Associate Editor of nine international journals.