2582 IEEE TRANSACTIONS ON MAGNETICS, VOL. 43, NO. 6, JUNE 2007
Optimal Design of Magnetically Actuated Optical Image Stabilizer
Mechanism for Cameras in Mobile Phones via Genetic Algorithm
Chi-Wei Chiu
1, Paul C.-P. Chao
1, and Din-Yuan Wu
2Department of Electrical and Control Engineering, National Chiao Tung University, Hsinchu 300, Taiwan R&D Center for Membrane Technology, Chung-Yuan Christian University, Chung-Li 320, Taiwan
This paper proposes an optimal electromagnetic actuator for the application of optical image stabilization in cameras of mobile phones. The image stabilization composes of vertical and horizontal moving platforms to compensate the shaking from hands. The platforms are actuated by the magnetic force from voice coil motors (VCMs). For the application of mobile devices, geometry size of the mechanism is extremely limited. However, the larger the size of yoke that covers the magnetic field is, the better uniformity it will perform. This study, therefore, is dedicated to conduct an optimal design with the coupled relationship between magnetic field and mechanical geometry. The magnetic field is converted to equivalent circuit in terms of mechanism geometry, and verified by ANSYS. The genetic algorithm (GA) is then applied for deriving optimal values of geometry dimensions of the system within satisfactory uniform magnetic field.
Index Terms—Camera phones, equivalent magnetic circuit, genetic algorithm (GA), image stabilization.
I. INTRODUCTION
A
S the demand of mega-pixel camera phones in the market increases, higher standard requirement of resolution and performance of camera image is also increasing. There are several techniques to improve the image quality, and one of the significant improvements is image stabilization mechanism. The blurred image is usually caused by the hand shaking from the photographer while shooting the pictures. Two main approaches, digital and optical ones, are widely adopted to compensate the shaking in the current development of digital still camera. Past study [1] proposed to improve the image quality via a digital approach, developing improved algorithms for digital image process. The optical approaches, on the other hand, provide better efficiency for the blurring compensation than the digital methods [2]–[5].This paper, therefore, proposed an optical image stabilization mechanism to be installed in camera phone as shown in Fig. 1. The image sensor is embedded in a set of vertical and hori-zontal movement platforms, which are actuated by the magnetic forces provided by voice coil motors (VCMs) to compensate the shaking of the camera phone. This paper is then dedicated to conducting an optimal design with the coupled relationship be-tween magnetic field and mechanical geometry.
This work aims to minimize the size of mechanism and also maximize actuation force by VCMs. The system equation of motion is first established. Then, the VCMs are designed to pro-vide actuation forces, and the sensitivity is defined for later op-timization. Moreover, the magnetic field of the VCM, which is between yoke and permanent magnetic, is converted to an equiv-alent circuit with consideration of magnetic resistance of air gap, magnetic, and magnetic leakage. The result of flux density from equivalent circuit under certain geometry size is verified by ANSYS. Finally, genetic algorithm (GA) is applied to solve the optimization problem with the defined geometry values and corresponding magnetic parameters. Based on the optima, the
Digital Object Identifier 10.1109/TMAG.2007.893320
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
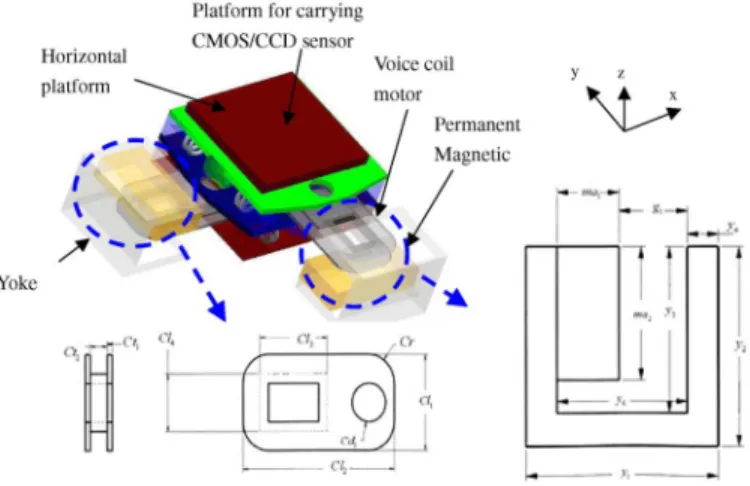
Fig. 1. Schematic plot of the optical image stabilization.
mechanism design for optical image stabilization for cameras in mobile phones is completed for providing the powerful actu-ation magnetic forces with proper size of the whole mechanism.
II. MATHEMATICALMODELING A. Design of Mechanism
The mechanism of the optical image stabilization system is mainly composed of horizontal and vertical platforms carrying image sensor; guide rods for fixing and springs for suspending the platforms; permanent magnets, yokes, and VCMs for actu-ating the platforms; as shown in Fig. 1. With the known designed mechanism, the system equation can simply be formulated as
(1)
where and denote the masses of the platform for and direction; and are the dampings from the two guide rods in and directions, respectively; and represent the stiffness of the springs that connect the moving platforms and cell phone body in and directions, respectively; and are the electromagnetic forces from
CHIU et al.: OPTIMAL DESIGN OF MAGNETICALLY ACTUATED OPTICAL IMAGE STABILIZER MECHANISM 2583
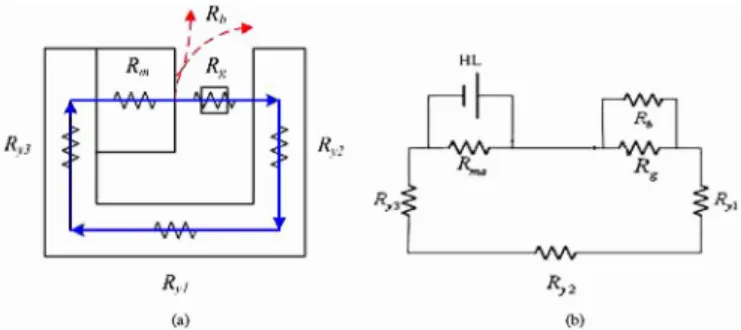
Fig. 2. (a) Magnetic flux of the structure. (b) Equivalent magnetic circuit.
the VCMs in and direction, respectively; and and are the friction. With the equation of motion (1) in hands, the dy-namic response of the stabilization actuator could be obtained with known input voltage excitation to VCMs.
B. Design of VCM
It is widely known that the electromagnetic force could be obtained by
(2)
where is the number of coil winding, is the applied cur-rent to the voice coil, is the effective length of the voice coil, is the magnetic flux density; and , and are the applied voltage, the cross-section area of the coil, the elec-tric conductivity of coil, and total length of the coil, respec-tively. Note that the derivation of (2) is based on the negligence of back-electromagnetic force (back-EMF) of VCM due to the much slower motion of the moving platform than the dynamics of VCM electricity.
In order to satisfy the requirements in the application of mo-bile device, the limited power supply is still required to lead to fast dynamic response of the stabilization system. For sim-plicity, the stiffness, damping, and friction terms in (1) are ne-glected. Therefore, the sensitivity is defined as
(3)
where the is the acceleration of the gravity, is the driving power, is the mass of the moving platform. Note that the electromagnetic force in (3) is not uniform between the gap of the yoke and permanent magnetic due to the nonuniformity of the magnetic flux density . To investigate the uniformity of the flux density, the magnetic field analysis is conducted via equivalent circuit method in Section II-C.
C. Equivalent Magnetic Circuit
For later numerical optimization, the magnetic flux density field is first considered as a uniform distribution, which means that the magnetic flux density is a constant along the gap as shown in Fig. 1. Then, a simple equivalent magnetic circuit is constructed for the magnetic actuation system to explore the relationship between the sensitivity (3) and varied geometrical dimensions. In this way, the sensitivity and actuation force can be optimized in the next step to meet the required speed of image stabilization.
Fig. 3. Simulation results of (a) magnetic flux and (b) magnetic intensity.
Considering the structure as shown in Fig. 1, the magnetic flux density could be treated as the magnetic resistance distri-bution, as shown in Fig. 2(a), and the corresponding equivalent circuit in Fig. 2(b). Then, the magnetic flux could be formed in terms of magnetic resistance as
(4)
where is the magnetomotive force and con-sidered herein as the aforementioned electromagnetic force ; and
(5)
while is the equivalent resistance for the magnetic field, is the magnetic resistance of magnet, is the magnetic resistance of air gap, is the magnetic resistance of magnetic leakage, and , and are the magnetic resistance of yoke while and are the permeability and cross-section area of each part of yoke, respectively, with
.
Note that the magnetic flux density between the gap of per-manent and yoke is
(6)
where is the cross-section area of the gap and
(7)
With the magnetic flux density in (6) in hands, one can obtain flux density variations under the influence of modifying each geometry parameter. Note that combining (2) and (6), the sen-sitivity (3) can be obtained and then treated as a cost function in the form of geometric dimensions, i.e., , and for horizontal part and , and for vertical part, as illustrated in Fig. 1.
D. Finite Element Analysis
To verify the legitimacy of the calculated magnetic flux density in (6), a commonly used software ANSYS is adopted. A structure with the dimensions is predesigned for verification, shown in Fig. 1, such as 0.0062 m, 0.006 m, 0.001 m, 0.005 m, 0.0042 m, 0.002 m, 0.004 m, 0.0022 m, and 0.004 m. Fig. 3(a) and (b) shows the simulation results of magnetic flux
2584 IEEE TRANSACTIONS ON MAGNETICS, VOL. 43, NO. 6, JUNE 2007
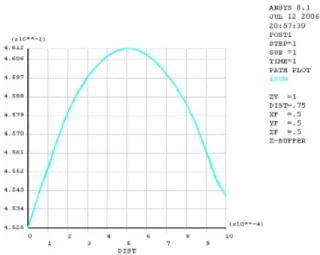
Fig. 4. Distribution of flux density between the yoke and permanent magnetic.
Fig. 5. Fitness value of the cost function.
and intensity with the settings such as the relative permeability on each portion, that is, air : 1, yoke : 2000, coil : 1, magnet : 1, and coercive force, magnet : 995 000 (A/m). Fig. 4 shows the distribution of flux density of the structure with uniformity along the air gap as 0.98. It is shown that the average flux density of the predesigned structure is about 0.4612 while the numerical result from (6) is 0.4399. The error between two methods is about 4.62% which is acceptable; it also proves the correctness of the equivalent magnetic circuit model.
III. OPTIMALPARAMETRICDESIGN
The purpose of this study is to minimize the size of image sta-bilization system and maximum actuation magnetic force with lower power consumption. This optimization problem leads to the aforementioned sensitivity (3), which is applied as a cost function. GA is widely applied for searching optimal values in complicated optimization problem. Since the number of de-signed geometry parameters is a large number 14, GA is suitable for searching the optimum dimensions of these 14 parameters for the proposed mechanism.
In this study, a GA program is constructed with setting popu-lation size to be 1000 for each parameter, the crossover and mu-tation rate to be 0.9 and 0.008, respectively; and entire program runs for 2000 generations. Fig. 5 shows the calculating results and the fitness value of the cost function within 2000
genera-TABLE I
OPTIMALDIMENSIONS FOR THEDESIGNEDSTRUCTURE
tions, where the average and worst (poorest) cases indicate the mean and lowest cost function values, respectively, for each gen-eration. It is obvious that the fitness value is converging around the 1200 generation even with a high crossover rate, showing the legitimacy of optimization results. The obtained optimal di-mensions and the corresponding values of the cost function are also obtained, as listed in Table I.
IV. CONCLUSION
This study optimizes the key dimensions of the mechanism for optical image stabilization with two-axes motions for the cameras in mobile phones. The objective of optimization is to maximize actuator sensitivity through providing maximum and uniform electromagnetic forces with the lowest power consumption and in the smallest size. To this end, this study has first successfully converted the magnetic field into an equivalent magnetic circuit, the prediction on magnetic flux of which is close to those computed by numerical tool of ANSYS. Based on the equivalent magnetic circuit, the GA is applied for searching optimal geometric dimensions to satisfy the objective of maximum sensitivity. A set of optimal geometric dimensions is obtained according to the results of optimization.
ACKNOWLEDGMENT
This work was supported in part by the National Science Council, Taiwan, under Grant 95-2221-E-009-367 and by the Ministry of Education, Taiwan, under the Center-of-Excellence Program on Membrane Technology.
REFERENCES
[1] H. C. Yu, T. Y. Lee, S. J. Wang, M. L. Lai, J. J. Ju, D. R. Huang, and S. K. Lin, “Design of a voice coil motor used in the focusing system of a digital video camera,” IEEE Trans. Magn., vol. 41, no. 10, pp. 3979–3981, Oct. 2005.
[2] H. C. Yu, T. Y. Lee, S. K. Lin, S. J. Wang, M. L. Lai, J. J. Ju, and D. R. Huang, “A low power consumption focusing actuator for a mini video camera,” J. Appl. Phys., vol. 99, no. 8, pp. 08R901-1–08R901-3, 2006. [3] S.-J. Ko, S.-H. Lee, and K.-H. Lee, “Digital image stabilizing algo-rithms based on bit-plane matching,” IEEE Trans. Consum. Electron., vol. 44, no. 3, pp. 617–622, Aug. 1998.
[4] K. Sato, S. Ishizuka, A. Nikami, and M. Sato, “Control techniques for optical image stabilizing system,” IEEE Trans. Consum. Electron., vol. 39, no. 3, pp. 461–466, Aug. 1993.
[5] H. Kusaka, Y. Tsuchida, and T. Shimohata, “Control technology for optical image stabilization,” SMPTE J., vol. 111, no. 12, pp. 609–615, Dec. 2002.
Manuscript received October 30, 2006; revised February 4, 2007 (e-mail: [email protected]).