Visual Tracking Control of a Wheeled
Mobile Robot With System Model and
Velocity Quantization Robustness
Chi-Yi Tsai and Kai-Tai Song, Associate Member, IEEE
Abstract—This paper presents a visual tracking control design of
a nonholonomic mobile robot equipped with a tilt camera. The pro-posed design enhances various image-tracking applications using an on-board monocular camera, such as human-robot interaction and surveillance. Based on Lyapunov theory, the proposed control scheme not only possesses some degree of robustness against para-metric uncertainty, but also overcomes the external uncertainty caused by velocity quantization noise. Moreover, the proposed con-troller fully works in the image space; hence, the computational complexity and the effects of sensor/camera modeling errors can be greatly reduced. Experimental results validate the effectiveness of the proposed control scheme, in terms of tracking performance, system convergence, and robustness.
Index Terms—Parametric uncertainty, round-off error, uniform
quantization error, visual tracking control, wheeled mobile robots.
I. INTRODUCTION
O
NE OF THE important features in designing intelligent service robots, such as exhibition guide robots or elderly-care robots, is to make the robot interact naturally with people. The key factors to accomplish such human-robot interactive task encompass several research topics, such as face detection, voice recognition, visual tracking, etc. With visual tracking, a robot can focus attention to a user and interact with him/her accord-ingly. Hence, the research on visual tracking control of mobile robots has been an active area in robotics and computer vision [1]–[14].Mobile robots with two independent driving wheels are widely adopted for home or service robotic platforms. These robots are nonholonomic and their motion is controlled by only two control inputs under the nonholonomic constraint. Existing visual servo control results for holonomic manipulators are not suitable for such mobile platforms. In recent years, the study of visual tracking control of nonholonomic mobile robots Manuscript received May 15, 2007; revised August 10, 2007 and April 07, 2008. Manuscript received in final form May 22, 2008. First published De-cember 09, 2008; current version published April 24, 2009. Recommended by Associate Editor B. de Jager. This work was supported in part by the National Science Council of Taiwan under Grant NSC 94-2218-E-009-008 and by the Ministry of Economic Affairs under Grant 95-EC-17-A-04-S1-054.
C.-Y. Tsai is with the Department of Electrical and Control Engineering, Na-tional Chiao Tung University, Hsinchu 300, Taiwan, and also with the Soft-ware R&D Department, EPC Business Unit, ASUSTek Computer Incorpora-tion, Taipai 112, Taiwan (e-mail: [email protected]).
K.-T. Song is with the Department of Electrical and Control Engineering, National Chiao Tung University, Hsinchu 300, Taiwan (e-mail: ktsong@mail. nctu.edu.tw).
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TCST.2008.2001053
equipped with an on-board monocular camera to track a target has gained increasing attention. The reported methods usually focus on the visual tracking control of wheeled mobile robots to track a static target, such as a ground line, landmark, or reference image, for the purpose of visual navigation [1]–[4] or visual regulation [5]–[8]. On the other hand, because tracking a dynamic moving target is an important requirement for in-telligent robotics, some efforts focused on the control problem of visual tracking of a dynamic moving (non-static) target. In [9], Wang et al. proposed an adaptive backstepping control law based on an image-based camera-target visual interaction model to track a moving target with unknown height parameter. Although their approach guarantees asymptotic stability of the closed-loop visual tracking system in tracking a moving target, the case of tracking a static target cannot be guaranteed due to the nonzero restrictions on the reference velocity of the mobile robot. In [10], Song et al. combined a face detection algorithm with a proportional–integral–derivative (PID) controller to track a moving person in a home setting. The main disadvantage of their method is that it cannot guarantee the stability of the closed-loop visual tracking system based on a stability criterion. In [11], Malis et al. integrated template-based visual tracking algorithms and model-free vision-based control techniques to build a flexible and robust visual tracking control system for various robotic applications. The reported system failed in the full occlusion condition due to the requirement of homography estimation. In [12], Han et al. proposed an image-based visual tracking control scheme for a mobile robot to estimate the position of the target in the next image and track the target to the central area of the image; however, the estimation result was very sensitive to the image noise due to the shortcoming of the differential approximation approach.
From the literature, it is still a challenge to design a robust vi-sual tracking controller for nonholonomic mobile robots to track a dynamic moving target based on a stability criterion. Further, in realization of the control schemes, it has been noted that the disturbances of velocity quantization error and target occlusion degrade the performance of the controller and might make the system unstable. These problems have not yet been clarified in many existent related works and hence motivated us to develop a robust visual tracking control method to overcome uncertain-ties of system model, velocity quantization, and occlusion. To achieve this, a visual tracking controller with velocity quanti-zation robustness has been proposed in the authors’ previous work [13]. Recently, the authors combined a self-tuning Kalman filter with the visual tracking controller to estimate the target motion velocity and overcome the occlusion uncertainty [14]. However, in order to handle practical visual tracking situations 1063-6536/$25.00 © 2008 IEEE
and guarantee the stability of the closed-loop visual tracking system, the parametric uncertainty in system model requires ur-gent attention. Therefore, this paper extends the previous study [13] to analyze the robustness property against the system model uncertainty.
The rest of this paper is organized as follows. Section II de-scribes the system modeling of visual tracking control problem and the controller design accordingly. In Section III, the robust-ness of the control system against the system model uncertainty is analyzed and discussed. Section IV presents the design of the robust control law to overcome the velocity quantization error encountered in practical systems. Experimental results are re-ported in Section V. Several interesting experimental observa-tions will be presented and discussed. Section VI concludes the contributions of this paper.
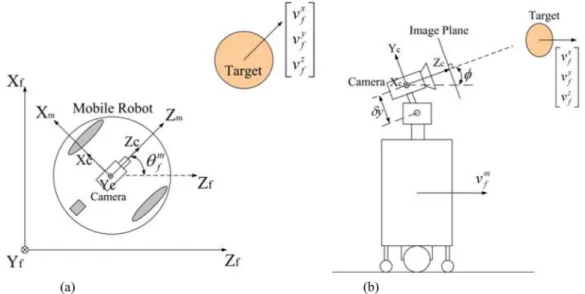
II. SYSTEMMODELING ANDCONTROLLERDESIGN We consider the nonholonomic visual tracking control problem such that a wheeled mobile robot with a tilt camera tracks a dynamic moving target, which is supposed to be a well-recognizable object with appropriate dimensions in the image plane and can only translate with respect to the robot. For instance, a cylindrical target as shown in Fig. 2 was used in the experiments of this paper, and a human face was tracked as a target in [13]. The tilt camera is mounted on top of the mobile robot and is assumed to have a limited field of view. Fig. 1(a) illustrates a model of the wheeled mobile robot and the target in the world coordinate frame , in which the target motion is supposed to be holonomic but with only translational motion relative to the robot. Fig. 1(b) is the side view of the scenario under consideration, in which the distance and tilt angle give the relation between the camera coordinate frame and the mobile coordinate frame . In order for the mobile robot to interact with the target in the image coordinate frame , a visual interaction model was proposed in [13]. Fig. 2 shows the definition of system state in . In Fig. 2, and are, respectively, the horizontal and vertical position of the centroid of target in the image plane, and is the width
of target in the image plane. Setting to
denote the system state, the linearized visual interaction model can be derived by quasi-linear parameter-varying (Quasi-LPV) description [15] such that
(1)
where is the target velocity in
Carte-sian coordinates, are the orientation angle of the mo-bile robot and the tilt angle of the on-board camera. We define
two scalars and , where denotes
the actual width of the target, represent the fixed focal length along the image -axis and -axis, respectively. We de-note the linear and angular velocity of the mobile robot, the tilt velocity of the camera, and a 3 3 diagonal matrix, then the matrices and vectors defined in (1) are given by the equation shown at the bottom of the page.
Based on the visual interaction model (1), a feedback lin-earization control law can be derived as in [13]
(2)
where is an 3
3 gain matrix, in which are three positive scalar factors, is the error-state in the image plane, and is the fixed desired state in the image plane.
Note that the control law (2) poses a singularity problem of matrix . As shown in Fig. 3, represents the target position with respect to the camera in the camera coordinate frame and is the angle related to the location of the target. The singularity condition of matrix can be found such that (readers refer to [13] for detailed derivation)
(3)
where is a scalar. Expression (3) implies
that the matrix becomes singular when equals to 0 or . The physical meaning of this is that the target is directly above or directly below the robot, and the robot will be unable
Fig. 1. (a) Model of the wheeled mobile robot and the target in the world coordinate frame. (b) Side view of the wheeled mobile robot with a tilt camera mounted on top of it.
Fig. 2. Definition of system state in the image plane.
Fig. 3. Physical meaning of the singularity condition (3).
to approach the target in any way due to deficient degree-of-freedom. Therefore, the robot should stop tracking temporarily under such circumstances. Also note that the controller (2) re-quires the target motion velocity, which can be estimated by a visual state estimator [14]. In this paper, this information is sup-posed to be known a priori in order to verify the performance of the proposed controller design.
Remark 1: The proposed visual interaction model (1) poses
a question that the derivation of is not always hold
Fig. 4. Derivation error ofd .
for a cylindrical target used in the system modeling. As shown in Fig. 4, parameters , , and remain the same, but the cylindrical target is shifted along . The projection is not the same and includes an error . Because the camera is supposed to be limited field of view, the error would be small and could be modeled as a system uncertainty. In Section III, the robustness analysis is presented in order to handle this kind of uncertainty.
III. ROBUSTNESSAGAINSTSYSTEMMODELUNCERTAINTY In this section, the robustness of the visual tracking controller (2) is investigated against model uncertainties from camera pa-rameters , robot parameters , target parameters
, and measurement of system state .
We first define a positive-definite Lyapunov function
(4) Taking the derivative of (4) yields, where
is the error-state model of (1). In view of the Lyapunov theory [16], expression (5) tells us that if then the equilibrium point of the system is asymptotically stable. Consider the following system with parametric uncertainties:
(6)
where is an unknown bounded
diagonal-matrix disturbance, is an unknown bounded ma-trix disturbance, and is an unknown bounded vector distur-bance. Hence, the derivative of (4) with parametric uncertainties becomes
(7)
where is unknown.
Suppose that is bounded and there exists a positive value , such that
(8) where is defined as the 2-norm value of vector . From (7) and (8), it follows that
(9)
Expression (9) implies that is a
lower-bound of . If can be guaranteed,
then is satisfied and thus the system has the robust property w.r.t. the parametric uncertainties.
Choose the controller in (2) with parametric uncertainties such that
(10)
where , and
are the diagonal elements of matrix . Substi-tuting (10) into (7) yields
(11)
where is a symmetric
positive-definite (SPD) matrix. From (9) and (11), it is clear that (12)
where denotes the minimum
eigenvalue of matrix . Expression (12) shows that if
is larger than defined in (8), then is
guaranteed. This means the proposed visual tracking controller (2) is robust against the unknown parametric uncertainties. Summarizing the previous discussions, we obtain the following theorem.
Theorem 1: Consider the visual interaction model (1) with
unknown bounded parametric uncertainties , , and defined in (6). Let be a positive value defined in (8). Choosing the controller as given in expression (2) with
parameters , the closed-loop visual tracking
control system is asymptotically stable for all , .
In Section V, the result of Theorem 1 will be validated by practical experiments. Further, in realization of the control schemes, it was noted that the quantization error in velocity commands degrade the performance of the controller and might make the system unstable. It is, therefore, interesting to study the robustness issues related to velocity quantization uncertainty. In Section IV, a robust control law based on Lya-punov’s direct method will be derived to overcome the velocity quantization uncertainty in practical control systems. A general form to describe the bounded uncertainty term should be
that , where and are
two positive values. In this paper, we ignore the effect from the second term and leave it in the future work.
IV. ROBUSTNESSAGAINSTVELOCITYQUANTIZATIONERROR When tracking a target, it is desirable for the robot to have a smooth motion in human-robot interaction. But in such circum-stances, one will face the problem caused by velocity quantiza-tion error in practical implementaquantiza-tion. In this secquantiza-tion, a robust control law is derived to handle the velocity quantization error encountered in practical control systems based on the error-state model defined in (5). To do so, a stability necessary condition (SNC) is first derived for ensuring global asymptotic stability of the closed-loop visual tracking system through Lyapunov’s direct method. The robust control law is then proposed to guar-antee that the visual tracking system satisfies the SNC and hence complete the controller design.A.
A. Stability Necessary Condition
Digital control systems usually have uniform quantization er-rors due to finite-length effects on sampled values [17]. In other words, the ideal (theoretical) control command is quantized such that
(13) where denotes the practical (actual) control command sent to
the robot actuator, and represents
the uniform quantization error encountered in the system. Thus, in practice, (7) becomes
(14)
where . Expression (14) implies that even if
satisfies , the practical control system
still can be unstable caused by . Therefore, one has the following SNC in practical control implementation.
SNC: Let denote the velocity output quantization error in practical systems. Consider the visual inter-action model (1) with unknown bounded parametric uncertainties. Choose a control law that satisfies defined in (7) and (8). If is satisfied. Then, the system state in practical system achieves asymptotic convergence
B. Proposed Robust Control Law
SNC implies that a practical system may become unstable if satisfies. Our goal is to design a robust control law that not only guarantees SNC to be always satisfied but also increases the convergence rate of the control system. First, we
expand such that
(15)
where ,
, , and denotes
the element of matrix corresponding to the th row and th column. Next, based on the velocity transformation
and , where and
are, respectively, left and right wheel velocities, and rep-resents the distance between two drive wheels, expression (15) becomes
(16)
where and
are the uniform quantization error encountered in left and right wheel velocities, respectively. Expression (16) reveals that if each term in (16) is equal to a nonnegative value,
then can be guaranteed. Based on this idea, a
variable structure robust control law is derived such that
If then if if end if If then if if end if If then if if end if (17)
where are the outputs of the proposed robust
control law for tracking control of the robot, and are three positive constants such that
(18) The value of constants is calculated based on the
range of quantization errors that are
depen-dent on the resolution of robot motion control module. It is easy to show that the outputs of the proposed robust control law guarantee that each term of (16) is equal to a nonnegative value, and thus SNC is satisfied. Further, because of
, an increase of the convergence rate of the practical system is obtained. In Section V, the sta-bility characteristic and convergence performance of the pro-posed control law will be verified by two practical experiments.
Fig. 5. Experimental mobile robots used to test the tracking performance of the proposed visual tracking control method. Left robot is called tracking robot and right one is called target robot.
Remark 3: Although quantization errors are analyzable using
techniques developed for finite word-length controllers [18], the previous reported methods are only useful for linear time-in-variant (LTI) systems, but not suitable for Quasi-LPV systems. On the contrary, our proposed control method can be applied to both LTI and Quasi-LPV systems. This is the merit of the pro-posed method. On the other hand, adding an integral term in the proposed linear controller or using a more responsive con-troller with high control gain can be effective to reduce the ef-fect of quantization error; however, these methods usually gen-erate large control outputs. In many applications in human-cen-tered service robotics, one expects relatively smooth motion for safety considerations. The proposed control method with smaller control gain guarantees that the equilibrium point of practical system is also asymptotically stable with improved convergence performance.
V. EXPERIMENTALRESULTS
Fig. 5 shows the experimental mobile robots used to test the tracking performance of the proposed visual tracking control method. Left robot (called tracking robot) is equipped with a USB camera and a tilt camera platform to track another robot (called target robot) on which a target of interest was installed. Two experiments have been carried out to verify the perfor-mance of the proposed control schemes: the first experiment aims to validate the robustness against the uncertainty of ve-locity quantization error, and the second one is to verify the re-sult of Theorem 1. The parameters used in the experiments are listed in Table I. Note that different control gains were used in the second experiment in order to verify Theorem 1.
A. Experiment 1: Robustness to Velocity Quantization Error
In this experiment, the target is set static in order to validate the performance of the proposed robust control law (17). Since the target is static , the controller (2) is simplified to
due to and . Fig. 6 presents the
experimental results using the simplified controller without the proposed robust control law (17). Fig. 6(a) indicates the tracking
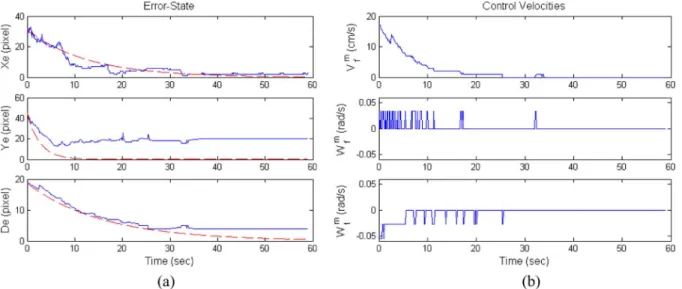
Fig. 6. Experimental results of the experiment 1 without using the proposed robust control law (17). (a) Tracking errors in the image plane. (b) Control velocities of the center point and tilt camera of tracking robot.
Fig. 7. Experimental results of the experiment 1 using the proposed robust control law (17). (a) Tracking errors in the image plane. (b) Control velocities of the center point and tilt camera of tracking robot.
errors in the image plane, in which the dotted lines are the sim-ulated theoretical values and the solid lines are the recorded ex-perimental values. From Fig. 6(a), we see that the system state in the practical experiment do not converge to the desired states. This is mainly caused by the system quantization error in the ve-locity commands, which degrades the performance of the con-troller. Fig. 6(b) shows the control velocities of the tilt camera and the tracking robot. In Fig. 6(b), it can be seen that the an-gular velocity of the robot is smaller than 0.04 rad/s; the quan-tization error greatly affects the actual angular velocity under such small values. Consequently, the system state cannot con-verge to the desired state as desired.
We repeated then the experiment by combining the proposed robust control law (17) with the visual tracking controller. When the velocity quantization noise is uniform, each quanti-tative level has the same quantization effect, and the proposed control law (17) is robust to this uncertainty.
Fig. 7 presents the experimental results using the simplified controller with the robust control law (17). Fig. 7(a) indicates
the tracking errors in the image plane. We see that the conver-gence rate of experimental results is faster than that of theoret-ical ones. This verifies that the proposed robust control law not only guarantees the tracking errors to decay to zero asymptot-ically but also increases the convergence rate of the practical system. Fig. 7(b) shows the control velocities of the tracking robot. A video clip of the experiment 1 by combining the pro-posed robust control law with the simplified visual tracking con-troller is available online.1
B. Experiment 2: Robustness to System Model Uncertainty
In this experiment, the target as shown in Fig. 2 was installed on top of a mobile robot for another robot to track. The target mobile robot was set to move along a circular path with velocities
, where 1[Online]. Available: http://isci.cn.nctu.edu.tw/video/RVTC_T/Static.wmv
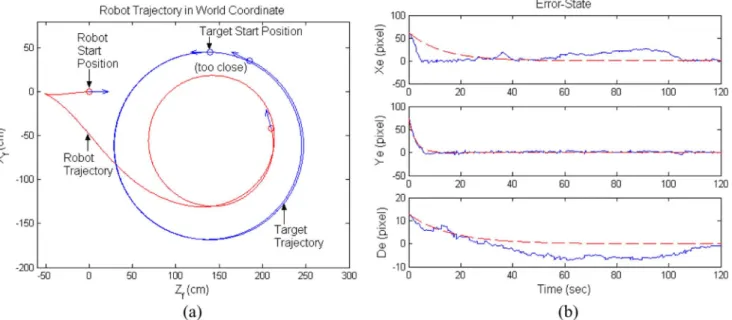
Fig. 8. Experimental results of the experiment 2 with control gains (5/64,6/16,4/64). (a) Robot trajectory in world coordinates. (b) Tracking errors in the image plane.
Fig. 9. Experimental results of the experiment 2 with larger control gains (5/16,6/8,4/16). (a) Robot trajectory in world coordinates. (b) Tracking errors in the image plane.
10.5 cm/s, 0.1 rad/s, and 51 ms. In order to validate
Theorem 1, small control gains were first applied to the control law (2), which implies a small robustness against the system parametric uncertainties. Later, larger control gains were used in order to increase the robustness and improve the tracking performance of the closed-loop visual tracking system.
Fig. 8 presents the recorded responses of this experiment using small control gains . In Fig. 8(a), the trajec-tories of the tracking robot and the target robot were recorded in world coordinates. Both trajectories were recorded by counting the pulses from shaft encoders. Fig. 8(b) depicts the tracking errors in the image plane. In Fig. 8(a), we observe that the tracking robot followed the target with a poor performance, which also can be seen in Fig. 8(b). In Fig. 8(b), the error states
and in the experiment do not converge to zero asymptoti-cally. The reason is that the closed-loop visual tracking system is asymptotically stable only for
in the experiment. This implies that the proposed controller provided a modest robustness of tracking errors against the parametric uncertainties.
According to Theorem 1, the proposed controller with larger control gains provides better robust property w.r.t. the system parametric uncertainties. Hence, larger control gains as listed in Table I were used to repeat the exper-iment. Fig. 9 shows the recorded responses of this experexper-iment. In Fig. 9(a), it is clear that the tracking robot tracked the target in a circular motion with improved performance compared with that of Fig. 8. Fig. 9(b) depicts the tracking errors in the image plane. We see that the system state in the experiment
TABLE I
PARAMETERSUSED IN THEEXPERIMENTS
converges asymptotically to the desired state as expected. These experimental results verify Theorem 1 and the robust control law (17) as well. A video clip of the experiment 2 by using the proposed visual tracking controller with larger control gains
is available online.2
VI. CONCLUSION ANDFUTUREWORK
A study of system model and velocity quantization uncertain-ties in visual tracking control of a wheeled mobile robot has been presented in this paper. In the parametric robustness anal-ysis, we have shown that the proposed visual tracking controller is robust w.r.t. system model uncertainties. Moreover, based on Lyapunov theory, the robust control law efficiently overcomes the unmodeled quantization effect in the velocity commands. Experimental results validate that the proposed control schemes guarantee asymptotic stability of the visual tracking system with parametric and velocity quantization uncertainties. In the future, we will extend this work to the general case of any task/com-mand dimension such as a mobile-manipulator system.
ACKNOWLEDGMENT
The authors would like to thank the Associate Editor, Prof. B. de Jager, and the anonymous reviewers for their helpful com-ments and suggestions.
REFERENCES
[1] F. Conticelli, B. Allotta, and P. K. Khosla, “Image-based visual ser-voing of nonholonomic mobile robots,” in Proc. IEEE 38th Conf.
De-cision Control, Phoenix, AZ, 1999, pp. 3496–3501.
[2] Y. Ma, J. Koˇsecká, and S. S. Sastry, “Vision guided navigation for a nonholonomic mobile robot,” IEEE Trans. Robot. Autom., vol. 15, no. 3, pp. 521–536, 1999.
[3] H. Zhang and J. P. Ostrowski, “Visual motion planning for mobile robots,” IEEE Trans. Robot. Autom., vol. 18, no. 2, pp. 199–208, Feb. 2002.
2[Online]. Available: http://isci.cn.nctu.edu.tw/video/RVTC_T/Circular.
wmv
[4] D. Burschka, J. Geiman, and G. Hager, “Optimal landmark configura-tion for vision-based control of mobile robot,” in Proc. IEEE Int. Conf.
Robot. Autom., Taipei, Taiwan, 2003, pp. 3917–3922.
[5] Y. Fang, W. E. Dixon, D. M. Dawson, and P. Chawda, “Homography-based visual servo regulation of mobile robots,” IEEE Trans. System,
Man, Cybern.-Part B: Cybern., vol. 35, no. 5, pp. 1041–1049, May
2005.
[6] J. Chen, W. E. Dixon, D. M. Dawson, and M. McIntyre, “Homography-based visual servo tracking control of a wheeled mobile robot,” IEEE
Trans. Robot., vol. 22, no. 2, pp. 407–416, Apr. 2006.
[7] G. L. Mariottini, D. Prattichizzo, and G. Oriolo, “Epipole-based visual servoing for nonholonomic mobile robots,” in Proc. IEEE Int. Conf.
Robot. Autom., New Orleans, LA, 2004, pp. 497–503.
[8] G. López-Nicolás, C. Sagüés, J. J. Guerrero, D. Kragic, and P. Jens-felt, “Nonholonomic epipolar visual servoing,” in Proc. IEEE Int. Conf.
Robot. Autom., Orlando, FL, 2006, pp. 2378–2384.
[9] H. Y. Wang, S. Itani, T. Fukao, and N. Adachi, “Image-based visual adaptive tracking control of nonholonomic mobile robots,” in Proc.
IEEE/RSJ Int. Conf. Intel. Robot. Syst., Maui, HI, 2001, pp. 1–6.
[10] K.-T. Song and C.-C. Chien, “Visual tracking of a moving person for a home robot,” J. Systems Control Eng., vol. 219, no. 14, pp. 259–269, 2005.
[11] E. Malis and S. Benhimane, “A unified approach to visual tracking and servoing,” J. Robot. Autonomous Syst., vol. 52, no. 1, pp. 39–52, 2005. [12] Y. Han and H. Hahn, “Visual tracking of a moving target using active contour based SSD algorithm,” Robot. Autonomous Syst., vol. 53, no. 3-4, pp. 265–281, 2005.
[13] C.-Y. Tsai and K.-T. Song, “Face tracking interaction control of a non-holonomic mobile robot,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots
Syst., Beijing, China, pp. 3319–3324.
[14] C.-Y. Tsai, K.-T. Song, X. Dutoit, H. Van Brussel, and M. Nuttin, “Robust mobile robot visual tracking control system using self-tuning Kalman filter,” in Proc. IEEE Int. Symp. Computational Intell. Robot.
Autom., Jacksonville, FL, 2007, pp. 161–166.
[15] W. J. Rugh and J. S. Shamma, “Survey paper: Research on gain sched-uling,” Automatica, vol. 36, no. 10, pp. 1401–1425, 2000.
[16] J.-J. E. Slotine and W. Li, Applied Nonlinear Control. Englewood Cliffs, NJ: Prentice-Hall, 1991.
[17] A. V. Oppenheim and R. W. Schafer, Discrete-Time Signal
Pro-cessing. Upper Saddle River, NJ: Prentice-Hall, 1999.
[18] K. Liu, R. E. Skelton, and K. Grigoriadis, “Optimal controllers for finite word length implementation,” IEEE Trans. Autom. Control, vol. 37, no. 9, pp. 1294–1304, Sep. 1992.
Chi-Yi Tsai was born in Kaohsiung, Taiwan, in 1978. He received the B.S.
and M.S. degrees in electrical engineering from National Yunlin University of Science and Technology, Yunlin, Taiwan, in 2000 and 2002, respectively. He is currently pursuing the Ph.D. degree in electrical and control engineering from the National Chiao Tung University, Taiwan.
Currently, he is an Engineer with the Software R&D Department, EPC Busi-ness Unit, ASUSTek Computer Incorporation, Taipei, Taiwan. His research in-terests include image processing, color enhancement processing, visual tracking control of the mobile robot, visual servoing, and computer vision.
Kai-Tai Song (A’91) was born in Taipei, Taiwan, in 1957. He received the
B.S. degree in power mechanical engineering from National Tsing Hua Uni-versity, Taiwan, in 1979, and the Ph.D. degree in mechanical engineering from the Katholieke Universiteit Leuven, Leuven, Belgium, in 1989.
Since 1989, he has been on the faculty and is currently a Professor with the Department of Electrical and Control Engineering, National Chiao Tung Uni-versity, Taiwan. He was with Chung Shan Institute of Science and Technology from 1981 to 1984. His research interests include mobile robots, image pro-cessing, visual tracking, sensing and perception, embedded systems, intelligent system control integration, and mechatronics. He served as the chairman of the Society of IEEE Robotics and Automation, Taipei Chapter from 1998 to 1999.