國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
在未標號圖形資料中高效率的圖形探勘演算法
An Efficient Algorithm for Mining Frequent Unlabeled Graphs
研 究 生:李 銘
指導教授:李素瑛 教授
在未標號圖形資料中高效率的圖形探勘演算法
An Efficient Algorithm for Mining Frequent Unlabeled Graphs
研 究 生:李 銘 Student:Ming Lee
指導教授:李素瑛 Advisor:Suh-Yin Lee
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
June 2010
Hsinchu, Taiwan, Republic of China
在未標號圖形資料中高效率的圖形探勘演算法
研究生:李銘
指導教授:李素瑛
國立交通大學資訊科學與工程研究所
摘要
近年來頻繁樣式探勘由頻繁項目集探勘及循序樣式探勘逐漸發展至探勘更 具結構性之資料,例如樹、絡及圖形等資料。圖形可用於表示許多複雜的資料及 資料間的關係,因此被廣泛應用於許多領域,如化學資訊學、生物資訊學及網路 探索等等。由於圖形資料的高複雜度,其子圖的個數呈指數成長,如何有效率的 探勘大型圖形樣式是一項重大的挑戰。在過去十年間,發展出了許多圖形探勘演 算法,我們研究目前已知最好的演算法 gSpan ,希望能更進一步改善其效率。 gSpan 採用 right-most 延伸法來產生候選圖形,與傳統方法比較,其產生之重 覆的候選圖形數目顯著減少。但由於 right-most 延伸法原本是用於有根樹的探 勘演算法,以此為基礎用於圖形探勘,仍會產生許多重覆的候選圖形。此情況造 成 gSpan 的效能降低,尤其在針對標記種類較少、或甚至未標號的圖形做處理 時,效能的降低更為顯著。因此我們修正此延伸法以進一步減少候選圖形個數, 並將之用於未標號圖形資料中。我們對合成資料以及實際之化學化合資料進行實 驗,驗證了所提演算法之正確性,並且有效的減少了候選圖形的個數。An Efficient Algorithm for Mining Frequent Unlabeled Graphs
Student: Ming Lee Advisor: Suh-Yin Lee
Institute of Computer Science and Information Engineering
National Chiao-Tung University
Abstract
In recent years, academic research on pattern discovery progressed from mining
frequent itemsets and sequences to mining structured patterns including trees, lattices,
and graphs. Among them, graphs serve as a general model to represent data and have
consequently been widely and extensively used in many domains like
cheminformatics, bioinformatics, web exploration, etc. However, mining large graph
patterns effectively and efficiently is challenging due to the presence of an
exponential number of frequent subgraphs and the complexity of graph data. In
response to the dilemma, several graph miners, such as gSpan, have been published in
the last decade and all of these newly developed graph miners work on undirected
labeled simple graph. By examining the state-of-the-art pattern growth algorithm
gSpan, which uses a right-most extension method, we learn that it dramatically
reduces the number of candidate graphs, compared with traditional join method.
generates many duplicate graphs when being applied to a free graph. This problem
causes remarkable performance degradation when the graphs are denser and with
fewer labels available, especially when the graphs are unlabeled. We propose a
modified extension method to further decrease the number of duplicate graphs, and
apply it to unlabeled graph datasets, hoping to make gSpan an even better miner than
it already is. We present the results on mining both synthetic datasets and a chemical
誌謝
首先,最感謝的是指導教授李素瑛老師。多年來,老師在研究上、生活上都 非常有耐心的給我許多指導,使我有很大的收獲。也感謝老師在我犯錯時的諸多 包容。 感謝沈錳坤教授和彭文志教授撥冗擔任我的口試委員,並提供許多寶貴的建 議,充實了本論文。 感謝資訊系統實驗室的所有成員:渏紋、健鵬、以錚學長及育君、蕙媜學姊 在研究及生活上的幫助,也感謝鵬屹、季強、維晉同學,與誠毅、書華、憲智學 弟,研究生活因你們多了許多歡笑與回憶。感謝我的高中好友晏慶在生活上的照 顧與協助。也感謝我的研究所同學瀚萱、本然及大學好友承翰及雋永,與我分享 生活中的種種精彩事物。更要感謝好友靖賢,在人生方向及論文寫作上給我許多 建議。 感謝我的家人,總是給予我關懷與支持,在我遇到困難時總是想盡辦法幫助 我,有了你們的辛苦與支持,才有今日的我。 要感謝的人很多,在此向所有曾幫助關心過我的人,致上最真切的謝意。 僅以此論文獻給所有關心我的人。Table of Contents
Chinese Abstract ... i English Abstract ... ii Acknowledgement ... iv Table of Contents ... v List of Figures ... viList of Tables ... vii
Chapter 1 Introduction ... 1
Chapter 2 Related Works ... 7
2.1 The Apriori-Based Approach ... 7
2.2 The Pattern-Growth Approach ... 10
Chapter 3 Problem Definitions ... 14
Chapter 4 The Graph Mining Algorithm ... 17
4.1 Lexicographic Order ... 19 4.1.1 DFS Subscripting ... 20 4.1.2 DFS Code ... 21 4.1.3 DFS Lexicographic Order ... 24 4.2 Right-Most Extension ... 26 4.3 gSpan ... 28
4.4 The Proposed Enumeration Method ... 31
Chapter 5 Experimental Results ... 34
Chapter 6 Conclusion and Future Works ... 38
List of Figures
Fig. 1-1 A sample graph data set of chemical structures ... 2
Fig. 1-2 Free extension ... 4
Fig. 1-3 Right-most extension ... 5
Fig. 1-4 Three isomorphic graphs ... 5
Fig. 2-1 AGM: Two graphs joined by two paths ... 8
Fig. 2-2 FSG: Two graphs and their potential candidates ... 9
Fig. 2-3 Runtime of the four algorithms ... 13
Fig. 2-4 Memory Usage of the four algorithms ... 13
Fig. 3-1 A labeled graph ... 14
Fig. 3-2 An example of subgraph isomorphism ... 16
Fig. 3-3 An Example of the supports of graphs ... 16
Fig. 4-1 A naïve graph mining algorithm ... 18
Fig. 4-2 Four different ways to generate g ... 19
Fig. 4-3 DFS subscripting ... 21
Fig. 4-4 An example of edge order ... 23
Fig. 4-5 The graphs extended from the graph in Fig. 4-3(b) ... 27
Fig. 4-6 An example of non-minimum DFS code ... 28
Fig. 4-7 A DFS code tree ... 29
Fig. 4-8 The pseudo code of gSpan [28] ... 29
Fig. 4-9 The function isMinimum ... 30
Fig. 4-10 The search space of gSpan ... 31
Fig. 4-11 A right-most extension ... 32
Fig. 5-1 Number of candidates (synthetic dataset) ... 36
List of Tables
Table 4-1 DFS codes for the graphs in Fig.4-3(b)-(d) ... 24 Table 5-1 Synthetic dataset parameters ... 35
Chapter 1
Introduction
Over the past few decades, frequent pattern mining has been an active and
prevalent research topic in data mining with many techniques. These techniques were
developed for the purpose of mining association rules [1], frequent itemsets [6, 7, 13,
27], sequential patterns [2, 17, 19], trees [3, 26], as well as graphs [10, 14, 15, 16, 28,
30].
Among all these data types, graphs, as a general data structure, can be used to
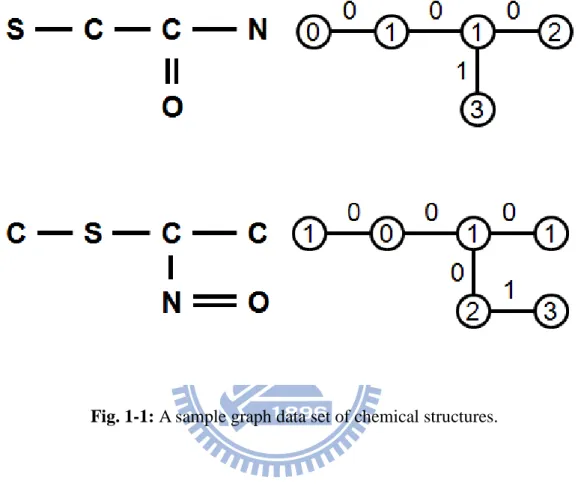
model more complicated relations among data. For instance, the chemical structure of
a given chemical compound can be modeled by an undirected labeled graph in which
each vertex corresponds to an atom and each edge corresponds to a chemical bond
between atoms. In electronic transactions, the vertices of graphs represent the account
owners and the edges of graphs indicate the occurrence of payments. Fig.1-1 shows a
sample set of chemical structures and their related graphs. Graphs have been used in
chemical informatics [4, 5, 22, 23], computer vision [25], video indexing [20],
machine learning [14], and text retrieval [12], etc.
The frequent subgraph mining problem is to find frequent subgraphs over a
no less than a user-specified threshold.
Fig. 1-1: A sample graph data set of chemical structures.
The kernel of frequent subgraph mining lies in thesubgraph isomorphism test. A
number of isomorphism test algorithms were developed in the past three decades,
such as Backtracking proposed by J. R. Ullmann[24] and Nauty proposed by B. D.
McKay [18]. They solve the graph isomorphism problem by calculating the canonical
labels [35] of graphs. The canonical label is one of the most generic and important
graph invariants. The Nauty algorithm is known to be one of the fastest algorithm for
isomorphism problem of a general graph has been proved to be NP-complete [31].
Therefore,no polynomial algorithm is able to solve it. The time-consuming process of
the isomorphism test leads to the fact that thecandidate test cannot be done with ease.
Early implementations of graph miner generate huge candidate set which contains a
large number of duplicate graphs. For each candidate graph, lots of isomorphism tests
need to be performed to determine whether it is a duplicate graph. As a result, testing
of false candidates degrades the performance to a certain degree.
Recently, Yan and Han [28] proposed a pattern growth based graph pattern
mining algorithm, gSpan, which was inspired by PrefixSpan [19], TreeMinerV [26],
and FREQT [3]. gSpan adopts a canonical labeling system, i.e. DFS (depth-first
search) lexicographic order. Each graph is assigned a unique minimum DFS code. In
the mining process, a graph is a duplicate if and only if its DFS code is not minimum.
gSpan detects duplicate graphs by calculating their minimum DFS codes. gSpan also
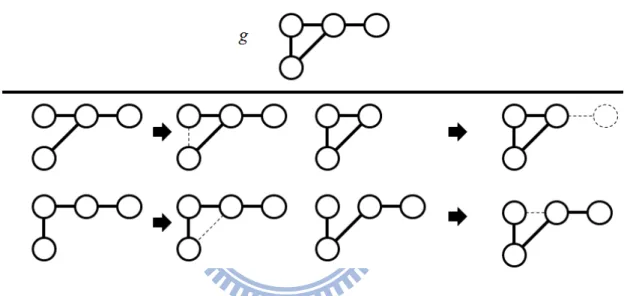
adopts a right-most extension strategy, which generates fewer candidate graphs. The
right-most extension grows a graph pattern by adding a new edge to the vertices on
the right-most path, but not to an arbitrary vertex. A right-most path of a graph is the
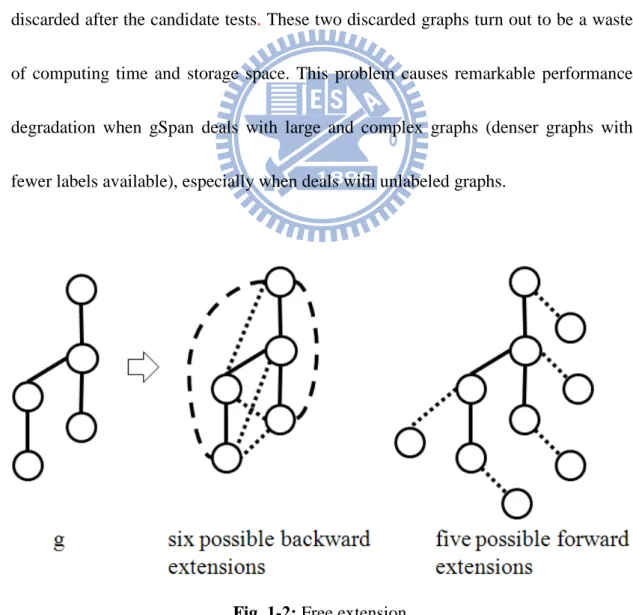
path from the first vertex to the latest added vertex. Fig. 1-2 shows a result of
extending g which adds new edges to arbitrary positions. Fig. 1-3 shows all the
right-most path of g. The dotted line show the new edges added to g. In this example,
the number of candidate graphs is decreased from eleven to four. Consequently, a
huge number of isomorphism tests are avoided. As a result, the storage cost is reduced
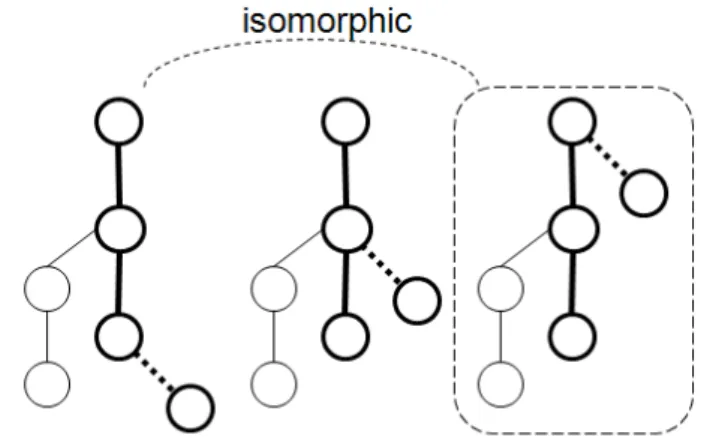
and the performance is improved significantly. However, gSpan generates some
duplicate graphs since the right-most extension method is originally used for rooted
tree mining. For example, Fig.1-4 shows three isomorphic graphs. In the mining
process of gSpan, all of these three graphs will be generated, but two of them will be
discarded after the candidate tests. These two discarded graphs turn out to be a waste of computing time and storage space. This problem causes remarkable performance
degradation when gSpan deals with large and complex graphs (denser graphs with
fewer labels available), especially when deals with unlabeled graphs.
Fig. 1-3 Right-most extension
Fig. 1-4: Three isomorphic graphs.
In mining the rooted tree, the right-most extension method does not generate any
duplicate while in mining the free graph, it does. Therefore, in Fig. 1-3, we can see
right-most extension method to make it more suitable for general graphs, which
prevents some duplicate graphs from generating. We apply this method to unlabeled
graph datasets to evaluate the percentage of decreased duplicate graphs.
The rest of this thesis is organized as follows. Chapter 2 focuses on related works.
Chapter 3 provides the details of problem definitions. Chapter 4 introduces the
algorithm of gSpan and formulates our graph mining algorithm. Chapter 5 gives the
experimental results. Chapter 6 summarizes the entire work and proposes the future
Chapter 2
Related Works
Recent studies have developed several graph-based data mining methods. The
pioneering work appeared in around 1994, when Holder et al. [14] proposed
SUBDUE to carry out approximate subgraph pattern discovery based on minimum
description length and background knowledge. Since SUBDUE uses a
computationally-constrained beam search, it cannot discover the complete set of
frequent patterns. The first system to try complete search for the wider class of
frequent subgraph named WARMR was later proposed by Dehaspe et al. [32] in 1998.
It applied inductive logic programming to the prediction of chemical carcinogenicity
by mining subgraphs. Besides these studies, recent approaches of graph-based data
mining can be categorized into two groups, an Apriori-based approach and a
pattern-growth approach. In the following a brief recount of these approaches will be
introduced.
2.1 The Apriori-based Approach
search starts with graphs of small size, and proceeds in a bottom-up manner. At each iteration, the size of subgraphs is increased by one. These new subgraphs are first generated by joining two similar frequent subgraphs that were discovered already. Afterwards, the occurrence of the new graphs is checked. Typical Apriori-based frequent subgraph mining algorithms include AGM by Inokuchi et al. [15], and FSG by Kuramochi and Karypis [16].
AGM (Apriori-based Graph Mining) adopts a vertex-based candidate generation
strategy that increases the subgraph size by one vertex at each iteration. Two size-k
frequent graphs are joined only when the two graphs have the same size-(k-1)
subgraph. Fig. 2-1 shows the two subgraphs joined by two paths. AGM actually forms
two candidates because it is impossible to determine whether there is an edge
connecting the additional two vertices before the generation.
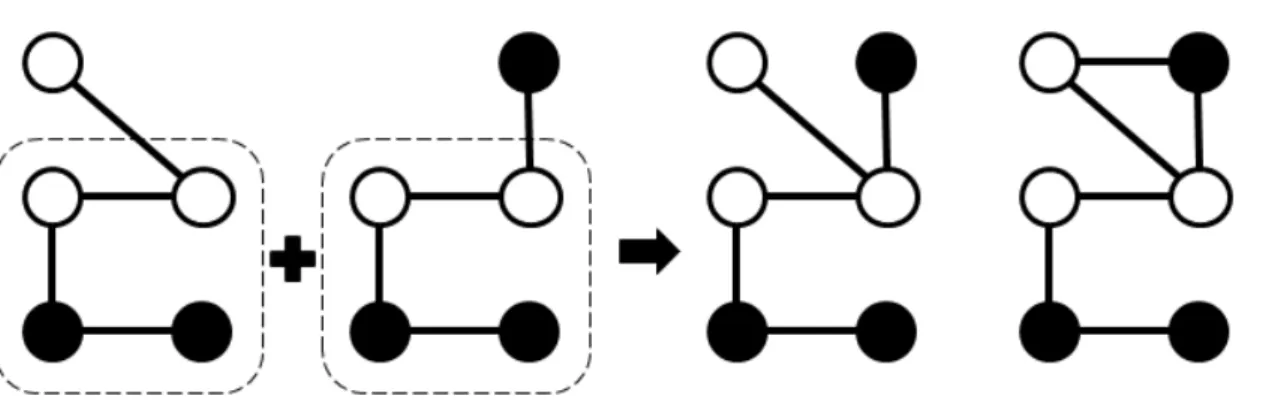
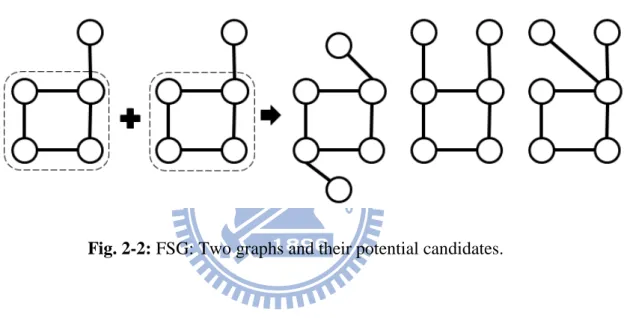
FSG (Frequent SubGraph discovery) uses an edge-based candidate generation
method that extends the subgraph by one edge at each iteration. Two size-k graphs are
joined if and only if they share the same subgraph having k-1 edges. An example of
the candidate generation of FSG is shown in Fig. 2-2.
Fig. 2-2: FSG: Two graphs and their potential candidates.
Comparatively speaking, AGM finds all frequent induced subgraphs in a graph
database while FSG finds all frequent connected subgraphs in a graph database. These
two pioneering Apriori-based frequent subgraph mining algorithms at the time when
they were proposed, however, both bear three problems, which are later modified and
fixed by newer and better ways. These problems include: (1) Huge candidate
generation. (2) Multiple scans of database. (3) Difficulties in mining long patterns.
pattern-growth strategy to avoid these problems.
2.2 The Pattern-growth Approach
Pattern-growth-based graph mining algorithms include gSpan by Yan and Han.
[29], MoFa by Borgelt et al. [33], FFSM by J. Huan et al. [34], and Gaston by Nijssen
et al. [30] These algorithms are inspired by the sequence mining algorithm,
PrefixSpan [19], and the tree mining algorithms, TreeMinerV [26], FREQT [3]. All of
them use a depth-first search for finding candidate frequent subgraphs.
The pattern-growth-based mining algorithms extend a frequent graph by adding a new edge in every possible position. A problem with the edge extension is that the same graph can be discovered many times.
MoFa (Molecule Fragment Miner) uses an embedding list to store the
information of vertices and the information of edges. Extension is restricted to those
graphs, which actually appear in the database. Isomorphism tests in the database can
cheaply be done by testing whether an embedding can be refined in the same way.
MoFa uses a graph local-numbering scheme to reduce the number of candidates
generated from a graph. MoFa sorts the vertices of a graph according to the sequence
may only occur at v or at vertices bigger than v. Moreover, all extensions that grow
from the same vertex v are ordered according to increasing vertex and edge labels.
Although this local ordering helps, MoFa still generates many isomorphic graphs and
then uses standard isomorphism testing to prune duplicates.
gSpan (graph-based Substructure pattern mining) uses a canonical representation
for graphs, called DFS code. A DFS traversal of a graph defines an order in which the
edges are visited. The concatenation of edge representations in that order is the
graph’s DFS code. Candidate generation is restricted by gSpan with the following rule:
graphs can only be extended at vertices that lie on the rightmost path. This restriction
reduces the generation of isomorphic candidates, but it cannot fully prevent duplicates
from generating. Therefore, gSpan computes the canonical DFS-code for each graph.
Graphs with non-minimum DFS code can be pruned. Since instead of embeddings,
gSpan only stores appearance lists for each graph, subgraph isomorphism testing must
be done on all graphs in these appearance lists.
FFSM (Fast Fragment Subgraph Mining) represents graphs as triangle matrices
(vertex labels on the diagonal, edge labels on the other positions). The matrix code is
the concatenation of all its entries, left to right and row by row. Based on
lexicographic ordering, isomorphic graphs have the same canonical code, CAM
candidates. The extension has a restriction: a new edge-vertex pair can only be added
to the last vertex of a CAM. After candidate generation, FFSM permutes matrix line
to check whether a generated matrix is canonical. If not, it can be pruned. FFSM
stores embeddings to avoid explicit subgraph isomorphism testing. However, FFSM
only stores the matching vertices, edges are ignored. This helps speeding up the
extension operations since the embedding lists of new graphs can be calculated by set
operations on the vertices.
Gaston (Graph/sequence/tree extraction) considers graphs that are paths or trees
first, and by only proceeding to general graphs with cycles at the end, a large fraction
of the work can be done efficiently, since there are efficient ways to enumerate paths
and trees. Only in the last phase, Gaston faces the NP-completeness of the subgraph
isomorphism problem. Gaston defines a global order on cycle-closing edges and only
generates those cycles that are larger than the last one. A graph isomorphism test is
then performed on those general graphs with cycles for finding duplicates.
A comparison among these four algorithms of both runtime and memory usage
has been done by M. Worlein et al. [38]. The comparison results are shown in Fig. 2-3
and Fig. 2-4. Considering both the runtime and the memory usage, gSpan has the best
Chapter 3
Problem Definitions
In this chapter, some basic background knowledge with respect to graphs will be
described. And then the frequent subgraph mining problem will be defined.
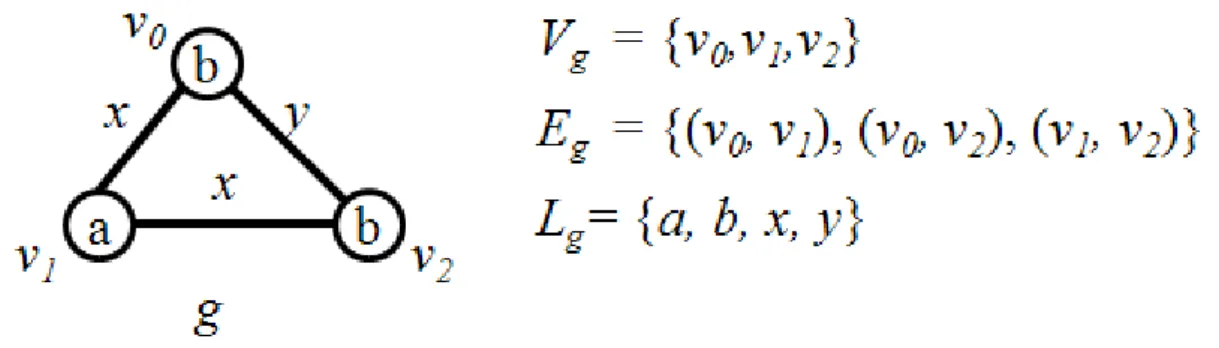
Definition 1 (Labeled Graph) A labeled graph can be represented by a six-tuple,
G = (V, E, L, lv, le ), where
V is a set of vertices, E ⊆ V × V is a set of edges, L is a set of labels,
lv : V → L, l is a function assigning labels to the vertices,
le : E → L, l is a function assigning labels to the edges.
In the rest of this thesis, we denote the sets and the functions corresponding to a graph g as Vg, Eg, Lg, lvg,and leg. Fig. 3-1 shows an example of a labeled graph g. In
this example, lvg(v0) = b, lvg(v1) = a, lvg(v2) = b, leg(v0, v1) = x, leg(v0, v2) = y, and
leg(v1, v2) = x.
Definition 2 (Subgraph) Given a pair of labeled graphs G = (V, E, L, lv, le) and G’ =
(V’, E’, L’, lv’, le’), G is a subgraph of G’ if and only if
V ⊆ V’,
∀ u ∈ V, lv(u) = l’v(u),
E ⊆ E’,
∀(u,v) ∈ E, le(u,v) = l’e(u,v).
Definition 3 (Isomorphism) A labeled graph G = (V, E, L, lv, le) is isomorphic to
another graph G’ = (V’, E’, L’, lv’, le’) if and only if there exists a bijective function
f : V → V’, such that ∀ u ∈ V, lv(u) = lv’(f(u)),
∀ u,v ∈ V, (u,v) ∈ E ⇔ (f(u),f(v)) ∈ E’, and le(u,v) = le’(f(u),f(v)).
Definition 4 (Subgraph isomorphism) A labeled graph G = (V, E, L, lv, le) is
subgraph isomorphic to another graph G’ = (V’, E’, L’, lv’, le’) if and only if there
exists an injection f : V → V’, such that ∀ u ∈ V, f(u) ∈ V’ and lv(u) = lv’(f(u)),
∀ u,v ∈ V, if (u,v)∈ E ⇒ (f(u),f(v)) ∈ E’, and le(u,v) = le’(f(u),f(v)).
In other words, a subgraph isomorphism from G to G’ is an isomorphism from G
to H, which is a subgraph of G’.
Definition 5 (Frequent Subgraph Mining) Given a graph dataset, GD, and a
threshold min_sup, the support of graph G, denoted by supG is defined as cardinality
of graphs in GD to which G is subgraph isomorphic.
supG = | {G’| G’∈GD, G is subgraph isomorphic to G’} |.
G is frequent if and only if supG ≥ min_sup. The frequent subgraph mining problem
is to find every frequent graph in GD.
vertices p1, p2, p3, and p4. Graph Q has three vertices q1, q2, and q3. The mapping
f: q1→p3, q2→p1, q3→p2 represents a subgraph isomorphism from Q to P. Note that
the support of Q in GD = {P} is 1, even though there are four subgraph isomorphism
from Q to P.
Fig. 3-2: An example of subgraph isomorphism.
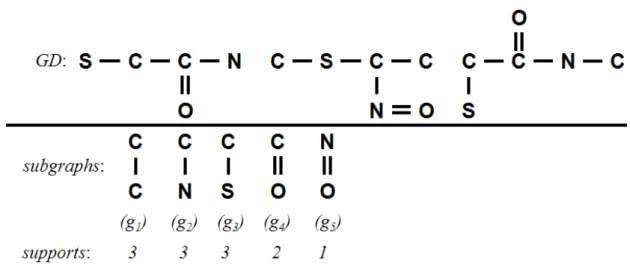
Fig. 3-3 shows a sample graph data set, and some subgraphs with their supports.
In these subgraphs, g1, g2, g3, and g4 are frequent if the minimum support is 2.
Chapter 4
The Graph Mining Algorithm
The discovery of frequent subgraphs usually consists of two steps. In the first
step, we generate frequent subgraph candidates. The frequency of each candidate is
checked in the second step. Therefore, the core of any frequent subgraph mining
algorithm are two computationally challenging problem: (1) subgraph isomorphism:
determine whether a given graph occurs in another graph; and (2) efficient
enumeration of all frequent subgraphs. gSpan introduces two techniques to solve these
problems: The DFS lexicographic ordering and the right-most extension. In this
chapter, we will introduce the general frequent subgraph mining process, and then
describe the procedure of gSpan and those techniques of gSapn. Finally, we will
formulate our proposed graph mining algorithm.
The general framework of a naïve frequent graph mining algorithm is outlined in
Fig. 4-1. We refer to this algorithm as NaïveGraph. In the mining process, a graph g can be extended by adding a new edge e. Let the new graph denoted by g ◊e. Edge e may or may not introduce a new vertex to g. For each discovered graph g, it performs
the extension recursively until all the frequent graphs with g embedded are discovered.
is less than min_sup, it is unnecessary to extend it any more.
Fig. 4-1: A naïve graph mining algorithm. [29]
NaïveGraph is simple, but not efficient. The key issue is the inefficiency of
extending g to g ◊e. The same graph can be extended in different ways. For instance, an n-edge graph may have n different ways to be formed from n different (n-1)-edge
graphs if we do not consider isomorphism. As a result, there may be n-1 duplicate
graphs. Fig. 4-2 shows a graph g and four different ways to generate it. Line 1 in
Algorithm 1 gets rid of duplicate graphs. The number of duplicate graphs may be huge.
It raises some severe problems. First, the generation and support computation of
duplicate graphs waste time. Second, it is nontrivial to tell whether a graph is a
see, these three problems affect the efficiency of the algorithm. gSpan overcomes these
problems by using two techniques: (1) the DFS lexicographic ordering; and (2) the
right-most extension. It has the following salient properties: (1) it reduces the
generation of duplicate graphs; (2) it does not need to search previous discovered
frequent graphs in order to detect duplicates; and (3) it never extends any duplicate
graph but still guarantees the completeness.
Fig. 4-2: Four different ways to generate g
In the following two sections, we focus on the background knowledge of the DFS
code tree. It includes the two major techniques used in gSpan.
4.1 Lexicographic Ordering
This section introduces several techniques developed to represent and extend
a lexicographic ordering among these codes, and mining DFS codes based on this
lexicographic order.
4.1.1 DFS Subscripting
When performing a depth-first search in a graph, a corresponding DFS tree can
be constructed. Fig. 4-3 shows a graph and three different DFS trees of it. The graph
has four vertices with labels x, x, y, z and four edges with labels a, a, b, b. The
subgraphs with darkened edges in Fig. 4-3(b)-(d) show the DFS trees. For a given
graph, there are many ways to construct different DFS trees by selecting different
starting points and different growing edges. When building a DFS tree for a graph G,
the depth-first discovery of the vertices forms a linear order. If there are n vertices in
G, each vertex is assigned a subscript from 0 to n-1 according to the discovery order.
i.e. v0, v1, v2,..., vn-1. v0 is called the root and vn-1 is called the right-most vertex. The
straight path from the root to the right-most vertex is named the right-most path. In
Fig. 4-3(b)-(d), three different subscriptings are generated for the graph in Fig. 4-3(a).
The right-most path is (v0, v1, v3) in Fig 4-3(b) and (c), and (v0, v1, v2, v3) in Fig. 4-3(d).
Incidentally, the darkened edges are forward edges while the undarkened ones are
forward edge; otherwise, a backward edge. The forward edges of vi means the forward
edges started from vi. The backward edges of vi means the backward edges started
from vi.
Fig. 4-3: DFS subscripting. [29]
4.1.2 DFS Code
Since there may be different DFS subscriptings for the same graph, gSpan wants
to select one from them as base subscripting. For this purpose, gSpan maps each
subscripted graph into an edge sequence. Afterwards, it builds an order among these
sequences and selects the subscripting that generates the minimum sequence as its
base subscripting. There are two kinds of orders in this process: (1) edge order, which
introduced.
The DFS tree has defined the discovery order of forward edges. For the graph
shown in Fig. 4-3(b), the forward edges are discovered in the order (0, 1), (1, 2),
(1, 3). Now consider the backward edges, for a given vertex v, all of its backward
edges should appear just before its forward edges. And its backward edges should
appear just after the forward edge where v is the second vertex. For vertex v2 in
Fig.4-3(b), its backward edge (2, 0) should appear just after (1, 2). Among the
backward edges from the same vertex, gSpan enforces an order: Given vi and its two
backward edges, (i, j1), and (i, j2), if j1 < j2, then edge (i, j1) will appear before edge
(i, j2). The ordering of the edges in a graph is now completed. Based on this order, a
graph can be translated into a sequence. A complete sequence for Fig. 4-3(b) is (0, 1),
(1, 2), (2, 0), (1, 3).
gSpan represents an edge by a 5-tuple, ( i, j, l(i), l(i, j), l(j)), where l(i) and l(j)
are the labels of vi and vj respectively and l(i, j) is the label of the edge (vi, vj). For
example, (v0, v1) in Fig. 4-3(b) is represented by (0, 1, X, a, X). For two edges e1 = ( i1,
j1, l(i1), l(i1,j1), l(j1)), and e2 = ( i2, j2, l(i2), l(i2,j2), l(j2)), gSpan defines a linear
order, <T, in R5. e1 <T e2 holds if one of the following statements is true:
(1) e1 and e2 are forward edges, and j1 < j2 or ( (j1 = j2)∧ (i1 > i2) ).
(2) e1 and e2 are backward edges, and i1 < i2 or ( (i1 = i2) ∧ ( j1 < j2) ).
(3) e1 is backward edge and e2 is forward edge, and i1 < j2.
(5) i1 = i2, and j1 = j2 , and li1 < li2 or
li1 = li2 and l(i1,j1) < l(i2,j2) or
l(i1,j1) = l(i1,j1) and lj1 < lj2.
Note that in (1), when j1 = j2, it is i1 > i2.In (5), the two edges have the same
discovery order, so the labels are considered. Fig. 4-4 shows a graph g, and four ways
to extend g. These extensions add edge (2, 0), (2, 3), (1, 3), and (0, 3) to g respectively.
Therefore the order between these edges will be (2, 0) <T (2, 3) <T (1, 3)<T (0, 3).
Fig. 4-4: An example of edge order.
Definition 5 (The DFS code) Given a DFS tree T for a graph G, an edge sequence
(e0, e1, e2,…, e|E|) can be constructed based on <T, such that ei <T ei+1, where i =
0,…,|E|-1. (e0, e1, e2,…, e|E|) is called a DFS code, denoted as code(G,T).
Table 4-1 shows three different DFS codes γ0, γ1, and γ2, which are generated by
DFS trees generate different DFS codes. It is a one-to-one mapping between a
subscripted graph and a DFS code. Thus, we can treat a subscripted graph and its DFS
code as the same. All the notations on subscripted graphs can also be applied to DFS codes. For instance, for a given DFS code α, we can use α ◊ e to represent a possible extension of α. The graph represented by a DFS code α is written as gα.
Table 4-1: DFS codes for the graphs in Fig. 4-3(b)-(d). [29]
4.1.3 DFS Lexicographic Order
gSpan wants to build an order among the DFS codes generated for a graph so
that a minimum DFS code can be defined for this graph. The edge order can be
extended to a sequence order, which is a linear order on DFS codes. The formal
Definition 6 (DFS Lexicographic Order) Given a graph dataset GD, suppose Z =
{code(G, T) | G∈GD, T is a DFS subscripting of G }, i.e., Z is a set containing all DFS codes of all graphs. DFS Lexicographic Order is a linear order defined as follows.
If α = code(Gα, Tα) = (a0, a1,…, am) and β = code(Gβ, Tβ) = (b0, b1,…, bn), α, β ∈ Z,
then α < β if and only if either of the following is true. (1) ∃t, 0 ≤ t ≤ min{m, n},∀k < t, ak = bk, and at <T bt.
(2) ∀k, 0 ≤ k ≤ m , ak =bk, and m ≤ n.
Definition 7 (Minimum DFS Code) Given a graph G, C(G) = {code(G,T) | ∀T, T is
a DFS tree for G}, based on DFS lexicographic order, the minimum one, min(C(G)), is called Minimum DFS Code of G.
According to DFS lexicographic order, we can compare the three DFS codes
listed in Table 4-1. Code γ0 is less than code γ1, which is less than code γ2. Moreover,
γ0 is the minimum DFS code of the graph in Fig. 4-3(a). Minimum DFS code can be
considered as canonical label.
Definition 8 (DFS Code Tree) In a DFS code tree, each vertex represents a DFS
code, the relation between siblings is consistent with the DFS lexicographic order. That is, the pre-order search of DFs code tree follows the DFS lexicographic order.
DFS code and vertex in the DFS code tree are equivalent in the sense that one
can be derived from the other. Any valid DFS code has a unique corresponding vertex
in the DFS code tree, and any vertex in the DFS code tree contains a valid DFS code.
4.2 Right-Most Extension
In Algorithm 1, NaïveGraph requires extending g in any possible position,
which will result in a huge number of duplicate graphs. gSpan adopts a more clever
way to extend graphs. The extension is restricted as follows: Given g and a DFS tree
T in g, e can be extended from the right-most vertex connecting to any other vertices
on the right-most path (backward extension); or e can be extended from vertices on
the right-most path and introduce a new vertex (forward extension). The extension
under these restrictions is named right-most extension, and it is denoted by g ◊r e,
where r indicates that the extension is a right-most extension. For instance, Fig. 4-5
shows all the potential right-most extensions of the graph of Fig.4-3(b). The darkened
edges show the right-most path. The dotted edges are the new edges extended and the
dotted vertices are the new vertices added. For simplicity, we omit labels here. The
backward extension candidates can be (v3, v0). The forward extension candidates can
Fig. 4-5: The graphs extended from the graph in Fig.4-3(b).
Since a graph may have different DFS subscriptings, the right-most extension
may generate many duplicate graphs if we need to extend all the subscriptings. The
following theorem shows that we only need to conduct the right-most extension on the
base subscripting.
Theorem 1 (Completeness) Performing right-most extension in NaïveGraph
guarantees the completeness of the mining result. Furthermore, performing only the right-most extension on the minimum DFS codes guarantees the completeness of the mining result.
When performing the right-most extension in NaïveGraph, it is possible that a DFS code α is minimum, but α ◊r e is not. For instance, Fig. 4-6 shows a graph g with
a minimum DFS code, but one extension of g is not minimum. In this case, we do not
Fig. 4-6 An example of non-minimum DFS code
4.3 gSpan
In this section, we formulate the algorithm of gSpan based on the DFS
lexicographic order and the right-most extension. gSpan uses a sparse adjacency list
representation to store graphs. The procedure of gSpan can be illustrated with a DFS
code tree. The mining process is equivalent to a pre-order traversal of the DFS code
tree, which enumerates all frequent subgraphs of a graph database. The pre-order
search of DFS code tree follows the DFS lexicographic order. Fig. 4-7 shows an
example of the search space of gSapn, where each vertex of the tree represents a DFS
Fig. 4-7: A DFS code tree.
Fig. 4-8: The pseudo code of gSpan. [28]
The difference between gSpan and NaïveGraph is the right-most extension and
existence judgement in Algorithm 1 Line 1 by checking whether s is minimum.
Actually, the checking is more efficient to calculate. It prunes all DFS codes which
are not minimum. It significantly reduces unnecessary computation on duplicate
subgraphs and their descendants. Fig. 4-9 outlines an algorithm for checking whether
s is minimum. Fig. 4-10 shows the search space of gSpan, If we find two DFS codes s
and s’ representing the same graph and s < s’, by Theorem 1, we can completely stop
searching any descendant of s’.
Fig. 4-10: The search space of gSpan. [28]
4.4 The Proposed Enumeration Method
Given a graph g with n vertices, v0, v1,…, vn, assume the length of its right-most
path is k. The right-most path of g can be represented by a sequence of (k+1) vertices
which starts from v0 and ends at vn. For the sake of simplicity, we denote the vertices
of the right-most path as r0, r1, …, rk. When performing right-most extension on g, we
denote the backward extensions as g ◊b0 e, g ◊b1 e, …, g ◊b(k-2) e , where g ◊bi e means
a backward extension of g which adds a backward edge (rk, ri). Similarly, we denote
the forward extension as g ◊f1 e, g ◊f2 e, …, g ◊fk e,where g ◊fi e means a forward
graph g and the corresponding extensions. The right-most path of g is (r0 , r1, r2, r3).
Fig. 4-11: A right-most extension.
There are two duplicate graphs in Fig. 4-11, g ◊f1 e and g ◊f0 e . In this case, the
two extensions are redundant. We want to shrink the search space by removing some
redundant extensions from the right-most extension. We propose an additional
restriction to the right-most extension. In the following section we will introduce this
modified extension.
For a given graph g with a right-most path (r0, r1, …, rk), in the forward
extensions, the operations ◊f0, ◊f1, …, ◊fk/2 are redundant, that is, graphs generated
by these operations are duplicate. For instance, in Fig. 4-11, f0 and f1 are not necessary.
The backward extensions remain unchanged. In order to prove the completeness of
Conjecture (Symmetry of Graph) Given a graph g, along its right-most path (r0,
r1, …, rk), we can find a graph g’, which is symmetric to g with respect to the center of
its right-most path.
According to this conjecture, for every graph g, there exists a graph g’, such that
g ◊f0 e = g’ ◊fk e. Thus, we can discard the operation f0 and still guarantee the
completeness of the mining result. For the same reason, we can remove all the
operation fi, i=0,1,…,k/2 from the right-most extension.
By replacing the right-most extension of gSpan with this modified right-most
Chapter 5
Experimental Results
Since the complexity of graph mining is higher when mines unlabeled graph
datasets, we conduct a performance study on unlabeled datasets. On both synthetic
and real world datasets, the experiments are performed. We use a synthetic data
generator provided by Kuramochi and Karypis[16]. The real data set we tested is a
chemical compound dataset with the labels removed. All experiments are done on a
3.0GHz Intel Pentium D PC with 2GB memory, running Windows XP system. Our
performance tests show that the number of candidates generated by our algorithm is
about 10% less than that generated by gSpan.
We use the data generator provided by Kuramochi. The parameter description of
the data generator is shown in Table 5-1. The synthetic datasets are generated using a
similar procedure described in [1]. Kuramochi et al. applied a simplified procedure in
their graph data synthesis. The details about how to generate the datasets were
described in [16]. The generator generates |D| graphs. The size of each graph is a
Poisson random variable whose mean is equal to |T|. In our experiments, some
parameters of the data generator are fixed value: |T|=10, |I|=6, and |S|=200. Since the
Table 5-1: Synthetic dataset parameters
We test the performance of our algorithm on a synthetic dataset with |D| = 10k.
Fig. 5-1 shows the number of candidates generated by our proposed algorithm and
Fig. 5-1: Number of candidates (synthetic dataset).
The chemical compound dataset is the same one used in [16,28], This was
originally provided for the Predictive Toxicology Evaluation Challenge [36], which
contains information on 340 chemical compounds. We set all the labels to a same
label to transform this dataset to a unlabeled dataset. There are 340 graphs in total.
The average graph size is 27.4 in terms of the number of edges and 27.0 in terms of
the number of vertices. There are 26 graphs that have more than 50 edges and vertices.
The largest graph contains 214 edges and 214 vertices. We test the performance on
this chemical compound dataset. Fig. 5-2 illustrates the number of candidates
Fig. 5-2: Number of candidates (chemical compound dataset).
The experimental results show that the number of candidates generated by our
proposed algorithm is about 5%~10% less than that generated by gSpan. In our
experiments, the mining result is correct, in other words, the completeness of our
proposed enumeration method is fulfilled. Unfortunately, we have not completed a
formal proof for the completeness. There is still a possibility that our proposed
algorithm works only on some special cases. We require further research and
Chapter 6
Conclusion and Future Works
In this thesis, we analyzed the state-of-the-art graph mining algorithm gSpan and
addressed the possible inefficiencies in it. We found that when gSpan deals with large
and complex graphs (denser graphs with fewer labels available), especially when
deals with unlabeled graphs, the performance of gSpan degrades. Based on gSpan, we
proposed a new graph enumeration method, which reduces the candidate generation.
There are still some research issues of our proposed algorithm. First, we have to
prove the completeness of our proposed algorithm. Second, there might be a better
algorithm to calculate the minimum code when the graph is unlabeled. Third, in order
to extend our algorithm to mine labeled graphs, we might require a new lexicographic
order. Therefore, to develop a new lexicographic order for our proposed algorithm is a
Bibliography
[1] R. Agrawal and R. Srikant. “Fast algorithms for mining association rules”, in Proc. 1994 Int. Conf. Very Large Data Bases (VLDB’94), pp.487-499, Santiago, Chile, September 1994.
[2] R. Agrawal and R. Srikant. “Mining sequential patterns”, in Proc. 1995 Int. Conf. Data Engineering (ICDE’95), pp.3-14, Taipei, Taiwan, March 1995.
[3] T. Asai, K. Abe, S. Kawasoe, H. Arimura, H. Satamoto, and S. Arikawa. “Efficient substructure discovery from largesemi-structured data”, in Proc. 2002 SIAM Int. Conf. Data Mining, Arlington, VA, April 2002.
[4] R. Attias and J. E. Dubois. “Substructure systems: concepts and classifications”, Journal of Chemical Information and Computer Sciences, Volume 30, pp.2-7 1990.
[5] D. M. Bayada, R. W. Simpson, and A. P. Johnson. “An algorithm for the multiple common subgraph problem”, Journal of Chemical Information and Computer Science, Volume 32, pp.680-685, 1992.
[6] R. J. Bayardo. “Efficiently mining long patterns from databases”, in Proc. 1998 ACM-SIGMOD Int. Conf. Management of Data (SIGMOD’98), pp.85-93, Seattle, WA, June 1998.
[7] D. Burdick, M. Calimlim, and J. Gehrke. MAFIA: “A maximal frequent itemset algorithm for transactional databases”, in Proc. 2001 Int. Conf. Data Engineering (ICDE’01), pp.443-452, Heidelberg, Germany, April 2001.
[8] L. P. Cordella, P. Foggia, C. Sansone, and M. Vento. “Graph matching: A fast algorithm and its evaluation”, in Proceedings of the 14th Int. Conf. on Pattern Recognition(ICPR-16), pp.1582-1584, August 1998.
[9] T. H. Cormen, C. E. Leiserson, R. L. Rivest, and C. Stein. Introduction to Algorithms, MIT Press, 2001 Second Edition.
[10] L. Dehaspe, H. Toivonen, and R. King. “Finding frequent substructures in chemical compounds”, in Proc. 1998 Int. Conf. Knowledge Discovery and Data
Mining (KDD’98), pp.30-36, New York, August. 1998.
[11] S. Fortin. “The graph isomorphism problem”, Technical Report TR96-20, Department of Computing Science, University of Alberta, July 1996.
[12] B. Liu, G. Cong, L. Yi, and K. Wang. “Discovering frequent substructures from hierarchical semi-structured data”, in Proc. 2002 SIAM Int. Conf. Data Mining, Arlington, VA, April 2002.
[13] J. Han, J. Pei, and Y. Yin. “Mining frequent patterns without candidate generation”, in Proc. 2000 ACM-SIGMOD Int. Conf. Management of Data (SIGMOD’00), pp.1-12, Dallas, TX, May 2000.
[14] L. B. Holder, D. J. Cook, and S. Djoko. “Substructure discovery in the subdue system”, in Proc. AAAI’94 Workshop Knowledge Discovery in Database (KDD’94), pp.169-180, Seattle, WA, July 1994.
[15] A. Inokuchi, T. Washio, and H. Motoda. “An apriori-based algorithm for mining frequent substructures from graph data”, in Proc. of the 4th European Conf. on Principles and Practice of Knowledge Discovery in Databases ( PKDD’00), pp.13-23, Lyon, France, September 2000.
[16] M. Kuramochi and G. Karypis. “Frequent subgraph discovery”, in Proc. 2001 Int. Conf. Data Mining (ICDM’01), pp.313-320, San Jose, CA, November 2001.
[17] H. Mannila, H. Toivonen, and A. I. Verkamo. “Discovery of frequent episodes in event sequences”, Data Mining and Knowledge Discovery, pp.259-289, 1997.
[18] B. D. McKay. “Practical graph isomorphism”, Congressus Numerantium, pp.45-97, 1981
[19] J. Pei, J. Han, B. Mortazavi-Asl, H. Pinto, Q. Chen, U. Dayal, and M.-C. Hsu. “PrefixSapn: Mining sequential patterns efficiently by prefix-projected pattern growth”, in Proc. 2001 Int. Conf. Data Engineering (ICDE’01), pp.215-224, Heidelberg, Germany, April 2001.
[20] K. Shearer, H. Bunke, and S. Venkatesh. “Video indexing and similarity retrieval by largest common subgraph detection using decision trees”, Pattern
Recognition, pp.1075-1091, 2001.
[21] P. Shenoy, J. R. Haritsa, S. Sudarshan, G. Bhalotia, M. Bawa, and D. Shah. “Turbo-charging vertical mining of large databases”, in Proc. 2000 ACM-SIGMOD Int. Conf. Management of Data (SIGMOD’00), pp.22-33, Dallas, TX, May 2000.
[22] S. Su, D. J. Cook, and L. B. Holder. “Knowledge discovery in molecular biology: Identifying structural regularities in proteins”, Intelligent Data Analysis, pp.413-436, 1999.
[23] Y. Takahashi, Y. Satoh, and S. Sasaki. “Recognition of largest common fragment among a variety of chemical structures”, Analytical Science, pp.23-28, 1987.
[24] J. R. Ullmann. “An algorithm for subgraph isomorphism”, Journal of the ACM, pp.31-42, 1976.
[25] E. K. Wong. “Model matching in robot vision by subgraph isomorphism”, Pattern Recognition, pp.287-304, 1992.
[26] M. J. Zaki. “Efficiently mining frequent trees in a forest”, in Proc. of the 2002 Conf. on Knowledge Discovery and Data Mining (SIGKDD’02), 2002.
[27] M. J. Zaki and C. J. Hsiao. “CHARM: An efficient algorithm for closed itemset mining”, in Proc. 2002 SIAM Int. Conf. Data Mining, pp.457-473, Arlington, VA, April 2002.
[28] X. Yan and J. Han. “gSpan: Graph-based substructure pattern mining”, in Proc. 2002 Int. Conf. Data Mining (ICDM’02), pp.721-724, 2002 .
[29] X. Yan and J. Han. “Closegraph: Mining closed frequent graph patterns”, in Proc. of the 2003 Conf. on Knowledge Discovery and Data Mining (SIGKDD’03), 2003.
[30] S. Nijssen, J. N. Kok. “A quickstart in frequent structure mining can make a difference”, in Proc. of the 2004 Conf. on Knowledge Discovery in Databases
[31] M. R. Garey and D. S. Johnson. “Computers and intractability: A guide to the theory of NP-completeness”, New York: W. H. Freeman, 1979.
[32] L. Dehaspe and H. Toivonen . “Discovery of frequent datalog patterns”, Data Mining and Knowledge Discovery, pp.7-36, 1999.
[33] C. Borgelt and M. R. Berhold. “Mining molecular fragments: Finding relevant substructures of molecules”, in Proc. 2002 Int. Conf. Data Mining (ICDM’02), pp.51-58, 2002.
[34] J. Huan, W. Wang, J. Prins. “Efficient mining of frequent subgraphs in the presence of isomorphism”, in Proc. 2003 Int. Conf. Data Mining (ICDM’03), pp.549-552, 2003.
[35] A. Inokuchi, T. Washio, and H. Motoda. “Complete mining of frequent patterns from graphs: Mining graph data”, Machine Learning, Volume 50, pp.321-354, 2003.
[36] A. Srinivasan, R. D. King, S. H. Muggleton, and M. Sternberg. “The predictive toxicology evaluation challenge”, in Proc. of the 15th Int. Joint Conf. on Artificial Intelligence (IJCAI), pp. 1–6. Morgan-Kaufmann, 1997.
[37] J. Han, H. Cheng, D. Xin, and X. Yan. “Frequent pattern mining: current status and future directions.” Data Mining and Knowledge Discovery, pp.55-86, 2007.
[38] M. Worlein, T. Meinl, I. Fischer, and M. Philippsen. “A Quantitative Comparison of the Subgraph Miners MoFa, gSpan, FFSM, and Gaston”, in proc. of the 9th European Conf. on Principles and Practice of Knowledge Discovery in Databases (PKDD’05), pp.392-403, 2005.
![Fig. 2-3: Runtime of the four algorithms. [38]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8381802.178226/22.892.136.754.117.1132/fig-runtime-algorithms.webp)
![Fig. 4-1: A naïve graph mining algorithm. [29]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8381802.178226/27.892.154.762.128.724/fig-naïve-graph-mining-algorithm.webp)