Proceedings of the 1998 IEEE
International Conference on Control Applications
Trieste, Italy 1-4 September 1998
WP06
Robust Neuro-Fuzzy Model-Following Control
of
Robot
Manipulators
Wei-Song Lin*, Chih-Hsin Tsai and Chi-Hsiang Wang
Institute of Electrical Engineering, National Taiwan University,
Taiwan, R.O.C.
Fax: 886-2-3638247 Tel: 886-2-3635251 ext. 413
E-mail [email protected]
Abstract
A robust neuro-fuzzy model-following control system is proposed for robot control with torque disturbance and measurement noise. The control objective is obtained by tailoring a nominal adaptation process of weights and a fine tuning mechanism to overcome the equivalent uncertainty. The major dfference comparing with previous approaches is that a novel fuzzy system is introduced such that the fuzzy rules are in the form of “IF
situatiori THEN the control input” rather than “IF
situation THEN the value of some nonlinear function”. Using Lyapunov stability method, the uniform ultimate boundedness of tracking error has been proved.
Keywords: Neuro-fuzzy, Robust, Model following control, Robot manipulators.
1. Introduction
In the proposed neuro-fuzzy logic controller (NFLC)
for the robust model-following control of robot manipulators, tlie parameters of the controlled plant are not assumed to be linear as in standard adaptive control
techniques. No prior knowledge about the parameters
and system matrix including its size is required. The
proposed scheme has been inspired from the previous
works [ 1-41, and we extend the application field to n-link
robot manipulators with torque disturbance and measurement noise. The major difference comparing with previous works is that a novel Fuzzy System with Rule Credit Assignment (FS-RCA) is introduced such that the fuzzy rules are in the form of “IF situation THEN the control input” rather than “IF situation THEN
the value of some nonlinear function”. Thus, the major
superiority of the fuzzy l o p control is preserved, since the knowledge of “the value of some nonlinear function ’’ exists inherently in the plant but hard to obtain from hunian expert knowledge. Besides, the proposed scheme can specifically deal with the measurement noise and considerably reduce the size of tracking error residual
set. In order to dealing with the effect of uncertain
modeling error and s h n k the tracking error residual set,
an on-line fine tuning mechanism for the consequent membershp functions of the neuro-fuzzy system is constructed. This gives the neuro-fuzzy system some
degree of “adaptability” in the sense that the fine tuning
mechanism can reflect to different disturbances and plant uncertainties. The NFLC can be trained in two different
knowledge I; ntilized to train the NFLC off-line
Otherwise d c -,%eights are tuned by using an on-line
robust ad:i!&fisi: scheme. Using Lyapunov method, it is
shown t h t ?‘ w i g h t adaptation has some degree of
robustnebs >nii i; e output tracking error can converge to
a residul:l
.&:
1 I’ L.L i itely2,
rhe
control problem
of an n-degree-of-freedom rigd
H(q)ij
+
C(y,e)e+
G(y) (1)(2) described in general form as follows,
<
=*f(Cr>d
+ G(4)u + d(Cr,i,0
with= H-l(q)(-w>i)!i - G”) >
-%z)
> d(q,!i,t) = H - ’ ( d A ( q , i , t ) >where all the terms have the same meaning as chosen in
[5] and
A
is the actuator input noise. Tdung tliemeasurement noise into account, we have q, = q
+
np ,4,
=4
+nv where the vector noise n p and nv , as well asA are supposed to be bounded random perturbations and
n p E C 2 . Let qnni and v, denote the reference output and
input, respectively. The control strategy is to conduct the behavior of the ith joint asymptotically following a linear
reference model of the following form
in the presence of bounded disturbance and measurement
noise. The constants ail, az2 are selected such that an
asymptotically stable reference model with desirable
properties is obtained. Fig. 1 shows the archtecture of
the nemo-fuzzy logic controlled robotic system. Fig. 2 shows the proposed FS-RCA, which is an ith fiizzy system for the ith joint of the robot manipulator.
q, = %q, i- ai& +vi ( 3 )
3.
The
neuro-fuzzy logic controller
3. I The multi-layer fuzzy system
Considering the request of numerical input and
output of the fuzzy system,
a
particular class of fuzzysystem with the singleton fuzzified, algebraic product T-
norm, the sup star conipositional operator [ 2 ] and the
local mean-of-maximum [ 6 ] method are used.
i ' ? '
THEN us 1s B; AND
The fuzzy sets A,' and Bi are linguisbc terms
charactenzed by the fuzzy membership funcQons and
IF X, 1s A,' AND ... AND X2n1S
4n
AND un B,' for J = 1;. , N
+
1P&+) = exp(-(x, - m i ) * /a:>
(4)
(5)
( l + ( ( c z J -u,)la,)2)-1,
tf
uz S C E ;( l + ( ( u z - C J ) / a R ' ) * y , 2f u2 > c:
'Ub (U,) =
where { a i , m i ) and { a L r , aRi, elJ} are referred to the premise and consequence parameters, respectively.
Rule Credit Assignnzent: The basic idea of the rule credit
assignment is to reward good niles by increasing the
confidence of the consequent fuzzy sets and the
recomnaendation fuzzy output of t h s rule. Denote 0; > 1
(or w;, < 1) as a reward (or a punishment) offered to the
$11 rule in the ith knowledge rule base, then the
conseqluent membership fiinction ( 5 ) can be reshaped lllt0
otherwise
where b ' . * 9 is the multiplication operation,
I
is the implication fiinction [2], p~ (2) = p4 (5, )p4(x,
1.. . p 4 s ( j j n )denotes the matching degree, respectively,
7
denotesthe location of the singleton implication fuzzy set and is defined as
(S) Using (6), (S) c m be resolved into
where uLR2 = (a, - ~ , ) / 2 .
q'
= the centroid of the set {U,: ,uo (U,) t ,u''(i?)} (9)N
qJ = ccJ - aLRi p J
& 7 j 5 / m ;
Fine-tuning ntechanism: Physically, the parameter am,
represents the difference between the left and right spread of the consequent membership functions. In this
paper, t h s term is employed as a robust control
component and
a
robust adaptive law for it is proposed inthe next section.
Analytical formulation of the multi-layer fzzzy system:
Using the center average defuzzification, the output
response of the fiizzy controller is
In the rule base, the (N+l)tli rule is chosen to be of
Takagi-Sugeno type and its consequent fuzzy set BN" is
singleton with support represented as the form of the synthesis input
(11) The curvature control parameter, a:+', of its antecedent
membershp functions assumed to approach to infimity so
that this rule will be fired whatever
X
is. The creditassignment takes place in rules R J , j = I,...,iV but
assigned to be 1 for R N + ~ . Accordingly, using (9) and ( l l ) , the analytical formulation of the muh-layer fuzzy system in equation (10) resolves into
where 6 = B l o c k diag(w:,p,--.,o:np), w,, and ,LL are
( N + l ) x l column vectors composed of ai, and
p'
, 8' =[s:,
.., 611 E R " " ,e,
and are N x 1 column vectorscomposed of w;c: and
p',
c'=[c;>...,c;lT,
c:
= a z l Y n 2 + a 1 2 Y n 1 +v,
U O =
3 ( - e i T p r
+
- (12)3.2 The decouping network and the overall control law
As shown in Fig. 1, the output of the robust
neuro-fuzzy controller, U , is a combination of U' and its
modification by the decoupling network as shown below. The decoupling network does not aim at complete decoupling by exact modeling to the interconnection
effect among subsystems. Instead, it compensates the
non-diagonal terms of G in (2). The matrix M is chosen
as
(14)
where In denotes a n x y2 identity matrix and
U = u o +1wuo (13)
A4 = -(In
+
? i j ) - IThe Non-Singularity Supervisor: Since such a weight matrix M in (1 4) will fail to be obtained as rank
(e)
< M , a non-singularity supervisor is introduced to overcome this difficulty. If6
becomes to be singular, it is then perturbed with small component values,[S,,],>,,
, so thatUsing (12), (13), (14) and the Matrix Inversion Lemma (A +BCD)-' = A" - A-'B(DA-'B
+
C-')-'DA-' , the analytical formulation of the robust neuro-fuzzy controller resolves into(16)
l
+
[62,]axn is guaranteed to have full rank. IU = (I" -(I" + ~ - ' ~ ) - ' ) ~ ~ ' ( - ~ ~ p , + c ' - a ~ ~ ~ ) a:,&)
=
&-y-@pf
+ -where
6
=c+6.
Let
0,
=[8:T,w~,...,w~]T
being bounded byM , = (8,
:lo2
I
<
8,,,,, } , and define the parameters of the best function approximation to be0,'. = argmin[sup/L - O:7p'l]
0, = arg min[sup/ g , - w:pI]
(17)
8: EM,,
a, -M.,
Then equation (2) can be rewritten in terms of the
measured output y, and the ith component can be
expressed as (18)
L,
= .[(XI+ Cg,(Xb, + d , ( x , t ) + ne, = o ; ' ' p ' ( x ) + + 2 ( m i p ( x ) + G ) U j + d , ( x , t ) + n , where (19) (( = J ( x ) - O : * ' ~ ' ( X ) - 6':*'Ap'(x, np, n,)6;
= g,(x)-od~ucx,-w%A~cx,n,,n") and (20) A , 4 x , n P , n v ) = p ( x ) - ~ ( X ) A p ' ( x , n p , n u ) = p ' ( x ) - p ' ( F )are iiieasure of sensitivity of the nominal model
( d ( q , g , t )
=
r i p=
nv=
0) with respect to the measurement noisenP
and M, . It is then possible to derive the errorequation from (18) and (3) as follows:
is,
-i,
= -",14, -" , A
- v r..
. -LPJ
To counteract the equivalent uncertainty, the fine-
tuning mechanism aLRrq5 is employed. The parameter
uml is chosen as u,,(S) = Sz t a n h ( F ) where $I is an
auxiliary adjustable parameter and E is a small positive
constant. Using the following assumption:
Assumption 1: There exists the smallest non-negative parameter values
Gi*
2 0 such that for aII x E TI''and ER,
I
r,
IS4 s
(25)And let Me = {3: :
l$,l
< $ c , , a } be the bound of $,,M l b e the union of M , and its boundary layer of
thickness E,. We propose the following smooth robust
weight adaptation scheme
ife'Pbb'Pe < di (26) 8, ' ( t ) =
1:;
~ d , 8 , , 8 , : ) R ; ' [ b ~ ~ e , w - a , ( 8 , othenvise with f 6 ' , ~ [ b , T ~ e , w - ~ , ( 6 ' , -Q,o)ls 0 (27) dq =r
min[l,dist(B,,M, ) / E # ] , othertvixc: and 9,(0
= with ife'Pbb'Pe 5 d," (28) (1 - d, )ri'[w,'b,'P,e, - 0,(8, - 8,0)], otherwiser
i".
$9, ~ ~ ~ e e , ~ :-
6,(9
- 9,, 115 0 (29) wz' = qj tanh(*) (30 ) d . = m i i t [ l , d i s t ( ~ , ~ ~ , ) / ~ ~ ] , otherwisewhere e = [ e , , . . . , e , J j ' , R, is a diagonal matrix with
positive diagonal elements, PI is a symmetric positive-
definite matrix satisfying the Lyapunov equalioii ATe + e A 8 = -Q+ with the design parameters (2,
>
0 ,and c1 and o2 are chosen small but positive constant to
keep 8, and
8,
from growing unbounded.Theorem I . Consider the robotic system (1) with unknown but bounded
x ,
g,' , dz , andn,
andn,
. Let assumption 1 hold. Take the Neuro-Fuzzy Logic Controller (16) and parameter adaptation laws (26) and(28). Then in the bounded state
(1)
Bi,
$, and the coiitrol input U are uniformly(2) Given any p satisfying p* < p S y tvliere
(%!a
E Q = {(4,!i):I(z,!j)l~
Y) > we obtainultimately bounded.
p' =
C;,[a,(o:
- 8 J ( q - o , o ) + aZ(q - 9,J + 2 K 9 ! ~ & 1 (3 1)m i n , m i n { u a 4 3 }
with
qM
=
m a x { ~ , ~ o } and K being a constantthat satisfies K = i.e., K = 0.2785 , there
exists T such that for T I t 2 00 the tracking error e
converges to the residual set .L(.?) ' L ( 5 ) ' rs
{ e : e T P e I pore'Pbb TPe I. d:) (32)
ProoJ Omitted due to limitation of space.
Remark 2. In the NFLC some degree of "adaptability" is
achieved by the fine tuning mechanism, a m j 7 which is
able to deal with different plants with different disturbances and control efforts.
Remark 3. In view of (3 l), if the design constants 6 , crI ,
tracking to a small neighborhood around e = 0 can be obtained.
Remark 4. The initial design of parameters B,, and
8,,
inthe NFLC can be considered as initial estimates of the
best parameters, and $,*, respectively. The closer B,,
and to 0: and 8; is, the snider p * becomes. This, in
turn, results in better tracking.
Remade 5. Suppose that some partial knowledge about
Ihe nianipulator to be controlled is known in the form of
"approximation to f ( q ,
4)
I t and "approxiniation to G ( q , j ) 'I denoted by the terms f o ( x l nominal parametersof the arm) and G'((I~ nominal parameters of the arm),
respectively. Then a set of initial weights can be selected by using the well-known least square algorithm or etc., such that Qio will close to 0,' and a smaller p * can be achieved.
5.
Simulation
The equations of motion of the manipulator
can
beexpressed in matrix form as follows, (rn, + mr)( + m2r: + 2m,r;r,c, + J , mar: + ni r r c
m2r; + J , I *
q[;!]+
(33)m,r: + rn2r,ric1
[-
nwAw;,:t;
+ 4,'1
+i""'
+ m2 )4ca + m'
c l2 1"I=[:]+[;;]
L
(m24c,* )s
where 7 q = 0.51,, rz = OSl2 , and c, -cos(q,),
.sr2 -sin(q,
+
4,) , etc.. The kinenlatics and inertial paranieters of the manipulator are given in Table I. Theexcessive ratio between m , and mi, is to emphasize the
load effect. The trajectory to be followed by the ith joint
is given by two decoupled linear systems as
q,,, = q , q , +
%4,
+ v, > i = 4-2 .The model parameters are chosen as follows: a,, = -1.0,
a,2 = -1.0, = -4.0 , aZ2 = -2.0 and the dnving inputs to
the reference model are sinusoidal functions
11, =
zsin(0.8nf),
v,
=1.5zcos(nt).
The referencemodel aid the plant are assumed to have the same initial
states as
ql(0)
=-1.5rad,
q 2 ( 0 )
=-1.2rad,
4,
(0)
= Orad / sec andi2(o)
= Orad / sec. Thememberslip fiinctions of states
ql,
gl,
q,,
andg2
(represented by generic variable X ) for the qualitative
statements are defined as {NB,
NS, ZE,
PS, P B } where:\B; 14z (~)=exp(-l.(x+l.S)~), NS:
A,
(x)=exp(-4(~+0.8)*),ZE:
A, (x)=exp(-4(x),), PS; A, (x)=exp(-4(x-O.S)'), PB:,4, (x)=e~p(-4(x-l.S)~). In (32) and (34), the design
parameters are given by Q, = (&=lo R, =Block diag
[0.011,,,,,, , 32OO01,,,,,, ,200001,,,x~,,], R,=Block diag
dzag [0.0251,,,x2,, , 200001,,,x~, , gl = 0.002, g 2 =0.001, a l d E = 0.005.
For the purpose of comparison, simulations for the
NFLC control are carried out for situations with and
without the nominal parameters of the manipulator. In (3 4)
through the training data
dk),
the initial parameters B;and U , are chosen based on the element-by-element
,
minimization of the following objective function ~ ~ I f o ( ( x " ' I nominal parameters of the arm ) -
7((1(~),
Q:)l[
~ l I G o ( x ' k ' /nominal parameters of the arm ) - G ( x ( ~ ) , w,,)l12
We chose 32 testing points
as
traimng data,x ' ~ ) ,
from either along the desired trajectories or nearby of
them. In the other case, no nominal parameters of the
manipulator is used, and the elements in
s:
andw , ~
arechosen randomly in the interval (-10,lO) and (-2,2),
respec~vely .
k
Model following control under disturbances
The combined effects of friction and external torque disturbance are
( 3 5 ) d , = 2.0sin(Gl)
+
2.5sin(i2) +OSsin(t)d , = 5.Osin(q1)
+
4.Osin(i2)+
0.4sin(t)For the case without measurement noise, the simulation
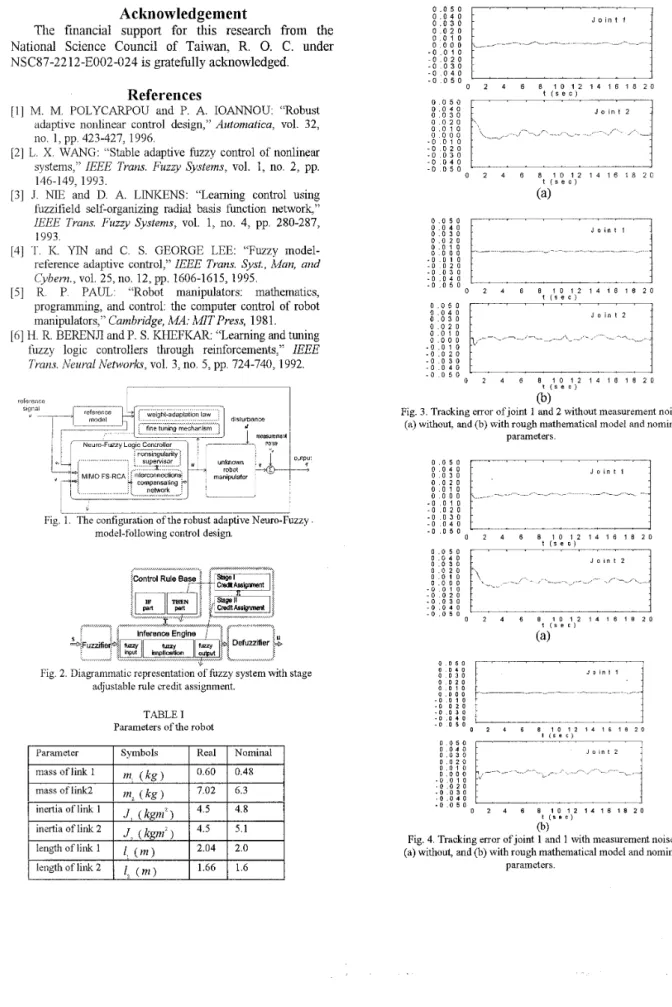
results are presented in Fig. 3. Fig. 3(a) and (b) show the case of the NFLC with and without using nominal parameters of the manipulator. We see from Fig. 3 that the NFLC achieves faster convergence when the initial parameters are chosen on the basis of nominal robot parameters.
Tracking control with measurement noise
The noise sources are assumed to be white with uniform distribution [-0.056, 0.051. We assume that the noise effects of different sensors are independent of each other. The external disturbances are set like the above subsection. Fig. 4 shows the tracking error of joint 1 and joint 2. Tlvs simulation shows that the proposed control
scheme is robust against measurement noise.
6. Conclusion
A method of robust neuro-fuzzy model-following
control for multi-link robot manipulators has been
constructed. The NFLC is composed of
an
multi-inpudmulti-output
fuzzy
system with adjustable rulecredit assignment and interconnections coinpensatmg network. The interconnections compensating network can decompose the robot dynamics into decoupled subsystems and the fuzzy part approximates the unknown non-linearity of the robot by leamng By using fine tuning mechmsm in the consequent memberslup functions, the NFLC based control system can achieve
some degree of robust properties The overall robust
adaptation scheme has been proved to be able to
guarantee the output tracking error to converge to a
dual set ultimately. Simulations of an example plant
have confirmed the robustness of the design to actuator
input noise and measurement noise. If the rough plant model and parameters of the robot are available, the NFLC can be trained in advance to achieve faster convergence of the weight adaptation and model
Acknowledgement
The financial support for this research from the
National Science Council of Taiwan, R. 0. C. under
NSC87-22 12-E002-024 is gratefully acknowledged.
mass of link 1 mass oflink2 inertia of link 1 inertia oflink2 lzngth of link 1 leiigth of link 2
References
[ l ] M. M. POLYCARF'OU and P. A. IOANNOU: "Robust adaptive nonlinear control design," Automatica, vol. 32, no. 1, pp. 423-427, 1996.
[2] L. X. WANG: "Stable adaptive fuzzy control of nonlinear systems," IEEE Trans. F u z v Systems, vol. 1, no. 2, pp.
146-149, 1993.
[31 J. NIE and D. A. LINKENS: "Learning control using fuzzifield self-organizing radial basis function network,"
IEEE Trans. Fuzzy Systems, vol. 1, no. 4, pp. 280-287, 1993.
[4] 'I. I<. YIN and C. S. GEORGE LEE: "Fuzzy model- reference adaptive control," IEEE Trans. Syst., Man, and Cybem., vol. 25,no. 12, pp. 1606-1615, 1995.
[ 5 ] R. P. PAUL: "Robot manipulators: mathematics, programming, and control: the computer control of robot manipulators," Cambridge,
A&!:
MIT Press, 1981. [6] H. R. BERENJI and P. S. KHEFKAR: "Learning and tuningfuzzy logic controllers through reinforcements," IEEE
Tvans. Neural Networlcs, vol. 3, no. 5 , pp. 724-740, 1992.
m, ( k g ) 0.60 0.48 m2 ( k g ) 7.02 6.3 J , (kgm') 4.5 4.8 J m z ) 4.5 5.1 1) ( 2.04 2.0 1.66 1.6 1, ( m ) 0"tP"t
1
network2
model-following control design
Fig 1 The configuration of the robust adaptive Neuro-Fuzzy
. . . ... .
Fig. 2. Diagrammatic representation of hzzy system with stage adjustable rule credit assignment.
TABLE I
Parameters ofthe robot
Parameter
I
SymbolsI
RealI
NominalI
J o i n t 1 - 0 0 1 0 - 0 0 2 0 - 0 0 3 0 - 0 0 4 0 - 0 0 5 0 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0
:i;cii
- 0 . o 4 01
, , , , , , , ,1
0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 - 0 . o 5 0 1 ( s e c ) 0 0 5 0 0 . 0 4 0 0 . o 3 0 0 0 2 0 0 . 0 1 0 0 0 0 0 - 0 0 1 0 - 0 . o 2 0 - 0 0 3 0 - 0 0 5 0 - 0 . 0 4 01
, , , , , , j 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 1 ( s e c )(a>
0 . 0 5 0 0 . o 4 0 0 . 0 3 0 0 . 0 2 0 0 . 0 1 0 0 . 0 0 0 - 0 . o 1 0 - 0 . o 2 0 - 0 . o 3 0 - 0 . o 4 0 - 0 . o 5 0 0 . o 5 0 0 0 4 0 0 . 0 3 0 0 . o 2 0 0 . 0 1 0 0 . o 0 0 - 0 . o 1 0 - 0 . o 2 0 - 0 0 3 0 - 0 0 4 0 - 0 0 5 0i " ' " ' ' ' ' i
J o i n t 1 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 t ( s e c )t " " " " ' l
J o i n t 2 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 t ( s e c )CO>
Fig. 3. Tracking error ofjoint 1 and 2 without measurement noise, (a) without, and (b) with rough mathematical model and nominal
parameters. 0 . 0 5 0 0 . 0 4 0 0 . 0 2 0 0 . 0 1 0 - 0 0 1 0 - 0 . o 2 0 - 0 . o 3 0 - 0 0 4 0 - 0 . o 5 0 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 1 ( 5 e C ) 0 . o 5 0 0 . o 3 0 0 . o 2 0 0 0 1 0 - 0 0 1 0 - 0 0 2 0 - 0 . o 3 0 - 0 . 0 4 0 - 0 . o 5 0 J o i n t 2 ._/.- - ,,/- -,-I.. ... 0 . o 0 0 - - - 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 I ( s e c ) (a> 0 0 5 0 0 0 4 0 0 0 3 0 J o i n t 1 - 0 . o 3 0 - 0 . o 4 0 - 0 0 5 0 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 I ( r e C ) 0 . 0 4 0 J o i n 1 2 0 . 0 3 0 0 . 0 2 0 - 0 .o 1 0 - 0 .o 2 0 - 0 . 0 3 0 - 0 .o 4 0 - 0 .o 5 0 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 t ( s e c ) (b)
Fig. 4. Tracking error ofjoint 1 and 1 with measurement noise,
(a) without, and (b) with rough mathematical model and nominal