國
立
交
通
大
學
電機與控制工程學系
碩
士
論
文
多功能虛擬操控器之研發
Development of Multi-Functional Virtual Manipulator
研 究 生:馬如駿
指導教授:楊谷洋 博士
多功能虛擬操控器之研發
Development of Multi-Functional Virtual Manipulator
研 究 生:馬如駿 Student:Ru-Jeang Ma
指導教授:楊谷洋 Advisor:Kuu-Young Young
國 立 交 通 大 學
電 機 與 控 制 工 程 學 系
碩 士 論 文
A ThesisSubmitted to Department of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering July 2004
Hsinchu, Taiwan, Republic of China
多功能虛擬操控器之研發
研究生:馬如駿 指導教授:楊谷洋 博士
國立交通大學電機與控制工程學系
摘要
近年來科技資訊不斷進步,帶動電腦及其週邊硬體迅速蓬勃發展,使得虛擬實境 (Virtual Reality)大量被應用於教育、訓練、娛樂、工業和醫學等方面。虛擬實境是一種 讓使用者透過多種的感官途徑與虛擬環境產生即時互動的一套動態模擬系統,其中力覺 感官介面更具有與虛擬環境雙向互動的性質,可在接受虛擬環境所給予力感回饋的同時 對環境進行操控。 因此我們提出利用力感系統與因應軟體模擬出各式的操控器,並應用 在操作訓練或遠端遙控操作上,實現一個多功能虛擬操縱器系統。 本論文首先以阻抗控制理論為基礎設計出三種模擬真實世界基本阻抗元件的公 式,接著透過適當的規劃將這些基本阻抗元件合成性質較為複雜的模型,如各種形狀的 虛擬牆和虛擬通道,再將此模擬法則套用在一組兩軸力回饋搖桿上,完成各項模擬控 制,最後進行運動限制(motion constraint)之建立,並完成一項扳手操控器的模擬實例。Development of Multi-Functional Virtual Manipulator
Student:Ru-Jeang Ma Advisor:Dr. Kuu-Young Young
Department of Electrical and Control Engineering
National Chiao Tung University
Abstract
Along with the rapid development of computers and their peripheral hardwares, Virtual Reality has been used in many areas, e.g., education, training, entertainment, industry, and medical science. Virtual Reality is a dynamic simulation system which allows the user to interact with the virtual environment through multiple sensorial channels. Among these sensorial channels, the haptic interface is capable of interacting with the virtual environment. Thus, we intend to use it along with corresponding softwares to simulate various kinds of manipulators, and then accomplish a multi-functional virtual manipulator.
In this thesis, we first design three basic impedance based on impedance control. Next, we combine these to form more complicated objects, such as various shapes of virtual wall and virtual tunnel. Finally, we utilize a group of virtual walls and virtual tunnels to form virtual motion constraints. The hardware for realizing these elements and constraints is based on a 2-DOF force reflection joystick. For demonstration, we use the proposed scheme to emulate a versatile wrench.
誌 謝
首先感謝學生的指導教授─楊谷洋博士,誠摯地感謝老師這兩年來的熱心指導,使 學生的研究工作可以順利完成,尤其是最後的論文寫作,經由老師多次細心校閱,方得 以圓滿呈現;同時,感謝口試委員們:林錫寬教授、宋開泰教授、以及蘇順豐教授撥冗 參與論文口試,並給予許多寶貴的指導與建議,使本論文更臻精湛;另外感謝同於『人 與機器實驗室』彼此互相勉勵的夥伴們:國鋒、彬原、高平、以及各位學弟們,因為有 了你們,改善並豐富了研究期間的枯燥生活;特別感謝木政學長,陪我一起解決硬體上 的問題,並啟發我研究上更多層面的思考方式;感謝室友俊廷,在我最困惑的時候適時 地給予鼓勵,並且同我一起討論研究方面的課題。最後,感謝親愛的家人一直默默地給 予我支持與鼓勵,因為你們的關懷與愛護,才能心無旁騖地完成學業,感謝你們!目 錄
中文摘要
i
英文摘要
ii
誌 謝
iii
目 錄
iv
表 目 錄
vi
圖 目 錄
vi
1. 導論..………..…………..……….…..… 1
2. 虛擬操控器模擬系統………....………. 5
2.1 系統架構....………. 5
2.2 阻抗控制理論……….……….……….…. 8
2.3 基本阻抗元件模擬法則……….………..… 11
2.3.1 質量物體運動……….…….……… 12
2.3.2 黏滯流體運動………..……… 12
2.3.3 彈簧運動………..……… 13
2.2.4 牆面………..……… 14
2.2.5 通道………..……… 15
2.4 阻抗模擬精確度……….………..… 16
2.4 系統穩定度分析……….………..… 18
3. 虛擬操控器之軟體系統……… 23
3.1 控制策略………. 24
3.2 虛擬牆………...……….………. 26
3.2.1 正向虛擬牆…….……….…….……… 27
3.3.2 非正向虛擬牆……...………..……… 28
3.3.3 圓形虛擬牆………..……… 30
3.3.4 橢圓形虛擬牆.………..……… 34
3.3 虛擬通道…...……….…….……… 36
3.2.1 正向通道……….……….…….……… 36
3.3.2 非正向通道……...………..……… 37
3.3.3 環形通道………..………….………… 37
3.4 虛擬阻抗動態特性………..……… 39
3.2.1 虛擬阻抗值變化.……….…….………39
3.3.2 虛擬環境力感變化.………..………39
4. 硬體機構與系統鑑別……… 41
4.1 搖桿傳動機構………. 42
4.2 搖桿動力原件………...……….………. 43
4.3 系統鑑別……….…….………...…… 45
4.4 力感測裝置………..………...……… 50
5. 實驗與討論………….……… 53
5.1 虛擬牆……….. 54
5.2 虛擬通道……….. 57
5.2.1 正向與非正向通道模擬.……….…….……… 58
5.2.2 環形與橢圓形通道模擬……...………..……… 61
5.2.3 複合式通道………..………….……… 65
5.3 動態虛擬阻抗……….. 67
5.4 扳手操作模擬應用實例…...……….. 69
6. 結論……….……….. 77
6.1 未來工作………. 78
參考文獻……….……….………. 80
表 目 錄
表 4.1 Panasonic 交流伺服馬達規格(型號:MSMA041A1E)…………. 44
表 4.2 Panasonic 控制驅動器規格(型號:MSMA041A1E)………. 44
表 4.3 健昇馬達控制卡規格(型號:NCC-9322 DAC)………….……….. 44
表 4.4 力回饋搖桿裝置物理阻抗參數值………..… 49
表 4.5 JR3 力感測器的最大負載量與靈敏度….………..……. 50
圖 目 錄
圖 1.1 虛擬實境週邊設備……… 3
圖 2.1 模擬系統訊號流程圖……… 6
圖 2.2 模擬系統架構圖……….. 6
圖 2.3 操控器模擬系統之應用……….. 7
圖 2.4 系統阻抗圖………..……….. 9
圖 2.5 合成
M、
B、與 模擬不同的出力情形……….…….. 10
K圖 2.6 由 雙 牆 面 形 成 通 道 … … … . . 1 5
圖 2.7 利用雙向彈簧阻尼組形成的通道……….. 16
圖 2.8 虛擬彈簧能量變化示意圖………….………. 19
圖 2.9 彈簧系統模擬方塊圖……….. 19
圖 2.10 加入使用者動態 Zo 之系統方塊圖……….. 21
圖 3.1 虛擬牆示意圖……….. 27
圖 3.2 一維正向虛擬牆示意圖……….. 28
圖 3.3 非正向虛擬牆示意圖……….. 29
圖 3.4 座標軸轉換……….. 30
圖 3.5 圓形虛擬牆示意圖……….………. 31
圖 3.6 搖桿侵入內圓虛擬牆之施力方向………32
圖 3.7 內圓虛擬牆施力分解圖………..
33
圖 3.8 搖桿侵入外圓虛擬牆之施力方向………34
圖 3.9 內外橢圓虛擬牆示意圖…………...………35
圖 3.10 一維正向通道示意圖………...………36
圖 3.11 非正向通道示意圖………...………37
圖 3.12 環形通道示意圖……….………..………38
圖 4.1 力回饋搖桿硬體系統……….. 41
圖 4.2 力回饋搖桿主體機械結構和工作空間……….. 42
圖 4.3 摩擦力測試曲線………...………45
圖 4.4 頻率響應法的原理………..
47
圖 4.5 輸入不同頻率弦波的頻率響應圖……….. 49
圖 4.6 力感測器方位定義……….. 51
圖 4.7 力感測器方向校正實驗讀值……….. 51
圖 4.8 力感測器方向校正圖……….………. 52
圖 5.1 牆面模擬示意圖……….. 54
圖 5.2 牆面感受模擬……….. 55
圖 5.3 正向通道模擬示意圖……….. 58
圖 5.4 垂直通道模擬……….. 59
圖 5.5 斜向通道模擬……….. 61
圖 5.6 環形通道模擬示意圖……….. 62
圖 5.7 環形通道模擬….………. 63
圖 5.8 橢圓形通道模擬示意圖………. 64
圖 5.9 橢圓形通道模擬……….. 64
圖 5.10 複合式通道模擬示意圖………. 65
圖 5.11 複合式通道搖桿軌跡……….. 66
圖 5.12 環形通道內部變化阻尼模擬……….. 68
圖 5.13 螺絲模具組……….. 70
圖 5.14 扳手工作方式示意圖………. 70
圖 5.15 左半圓弧形扳手模擬示意圖………. 72
圖 5.16 左半圓弧形扳手模擬……….………. 72
圖 5.17 下半圓弧形扳手模擬示意圖………. 73
圖 5.18 下半圓弧形扳手模擬……….………. 73
圖 5.19 不同施力角度之扳手示意……….……….. 74
圖 5.20 動態扳手模擬示意圖……….. 76
圖 5.21 動態扳手模擬……….. 76
第一章
導論
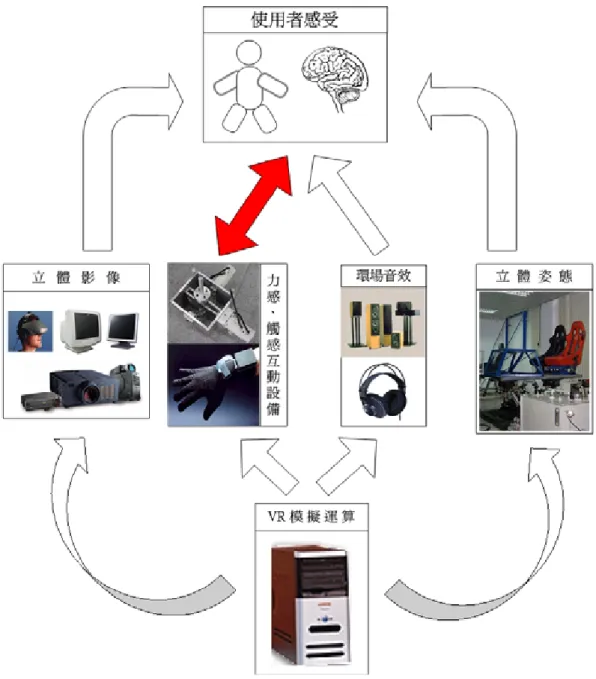
將外在真實世界的變化與資訊透過模擬系統的運算,並利用各種 3D 影 像、聲光特效、或是觸感力感等方法的結合具體複現,一直是許多人致力的 目標。雖然要模擬真實環境所給予的刺激並能做出即時反應的計算量相當複 雜,但由於近年來科技和資訊不斷地進步,帶動電腦及其週邊硬體迅速蓬勃 發展,因此透過強大的電腦運算能力和適當的軟體模擬程式來完成各種系統 的動態模擬,已讓這樣的一個虛擬實境系統正逐漸的被實現中。有關虛擬實境(Virtual Reality , VR)的概念,最早在 1986 年由 Jaron Lanier (the founder of VPL Corporation)最先提到[32],但其實在 1960 年代就已經有相 關領域的研究[31]。根據 Burdea [2-4] 的定義,虛擬實境是一種尖端的人機界 面,能讓使用者透過多種感官途徑(sensorial channel)與虛擬環境產生即時的互 動;這些感官途徑包括視覺、聽覺、觸覺,甚至是嗅覺及味覺。因而虛擬實 境具有所謂 3I 的特性分別是:互動(interaction)、沉浸(immersion)及想像 (imagination),不但可以賦予使用者親歷其境的擬真感受,甚至可以超越真實 世界的極限,例如在原子世界中漫遊等[28]。 人的五種感官刺激中,一般以視覺、聽覺以及觸覺為主,所以主要的人 機介面裝置也是用來處理影像、聲音、與力量方面的資訊。虛擬實境發展之 初即以立體影像(stereoscopic image)為主,接著加入環場音效(surround sound)
以增加臨場效果;而觸覺回饋早期應用在遠端操作(teleoperation)上,用來複現 遠端機器人在順應性工作下的力資訊情況,協助操作員控制遠端機器人完成 任務[5, 14, 15, 24]。為了讓人們能單純地從獲得刺激到更進一步發展與虛擬的 環境互動,以期營造出更具真實的虛擬世界,由於力感是最直接與環境互動 的介面,於是觸覺回饋裝置漸漸受到重視,在 1960 年代後被大量應用於虛擬 實境的回授刺激上[18, 26, 27, 33]。 圖 1.1 顯示虛擬實境的相關週邊設備,由圖可以很容易地發現觸感、力感 設備能夠提供雙向互動的途徑,一方面負責接收外在的刺激,一方面可同時 對環境做出反應,此雙向互動層次賦予使用者與系統之間相互調適的工作模 式,不但讓使用者擁有更大的控制權,且能更有效率地與系統溝通。將此裝 置應用於學校教學上,可以讓學生產生新奇、特殊的感受,如觸摸原子表面 [28];於汽車的駕駛訓練上,可以駕駛員體驗操作時的臨場觸感[10];於休閒 娛 樂 , 可 以 提 高 遊 戲 的 娛 樂 性 ; 於 工 業 製 造 上 , 可 以 使 電 腦 輔 助 設 計 (computer-aided design, CAD)人員在零件設計階段,不先製造實體原型就可進 行有觸感的模擬組裝,降低設計成本[4, 21];配合軟體的保護機制,可以幫助 操作者遙控機器人時免於碰撞發生危險[11, 14, 24];在醫學研究上,可以提供 模擬開刀所需的觸感[31]。 力感操控器的介面種類繁多,例如搖桿、手套、滑鼠等,操作方式也不 盡相同,但對於力回饋感受分析不外乎受限於真實世界的各種物理變化,如 推拉彈簧、阻尼的力量感受等等,只要能夠模擬出這些基本物理元件特性, 再將之組合成較為複雜的模擬感受,如虛擬牆的阻擋、通道的導引或是碰觸 時的軟硬回饋等,接著設計一套法則能將之任意結合組成所需要的結構,那 麼只要利用軟體規劃把上述的模擬法則程式化並應用到適當的力回饋裝置, 那麼就能實現一套可自由變化工作空間來模擬各式操作環境或感受的多功能
虛擬操控器。
本論文在第二章概述整個模擬系統架構,透過阻抗控制理論為各物理元 件作基本特性分析,並探討模擬系統的精確度與穩定度;利用第二章所規劃 出的基本模擬法則,第三章則是針對特殊虛擬阻抗元件作細部探討,如正向 與非正向的虛擬牆、虛擬通道,並分析一些基本阻抗特性由靜態走向動態的 操作感受;第四章介紹應用於此模擬系統的硬體機構,並對此硬體設備系統 鑑別以獲得其系統參數,方便日後分析及模擬;第五章將進行模擬實驗,並 透過這些虛擬阻抗元件的組合,加之於適當的韌體控制策略,實現一項虛擬 扳手模擬和動態通道展示實驗,證實此多功能虛擬操控器的可行性和可塑 性。最後,第六章會對此虛擬操控器模擬系統設計總結,並討論未來可能的 發展和可改進的地方。
第二章
虛擬操控器模擬系統
本章的目的在於發展一個可模擬各式操控器的模擬系統,並利用阻抗控 制理論推演出一套能讓使用者與虛擬環境雙向互動的模擬法則,將此法則應 用於簡單阻抗元件模擬上,如彈簧、阻尼、質量物體;之後也會對阻抗模擬 的精確度和此模擬系統的穩定度加以分析。2.1
系統架構
欲設計一個可模擬各式環境的虛擬操控器,首先必須規劃適用於此虛擬 操控器的動態模擬系統。圖 2.1 為此系統的控制訊號流程示意圖,在這個作為 使用者與虛擬環境之間聯繫的系統中,必須能夠接受使用者操作姿態的改變 (如施力大小、動作位移),並計算出這些改變在虛擬場景中相對的變化,然 後再回應一個適當的感受力給予使用者。 至於整體模擬系統架構可以分成軟體與硬體兩個部分,如圖 2.2 所示。軟 體層面負責建構虛擬的環境,並且由規劃好的模擬法則,處理從硬體部分得 到的資訊對虛擬環境的影響,再將回饋力的結果經由裝置介面卡輸入電壓命 令給硬體部分,而硬體部分直接與使用者溝通,給予使用者力的操作感受。圖 2.1 模擬系統訊號流程圖
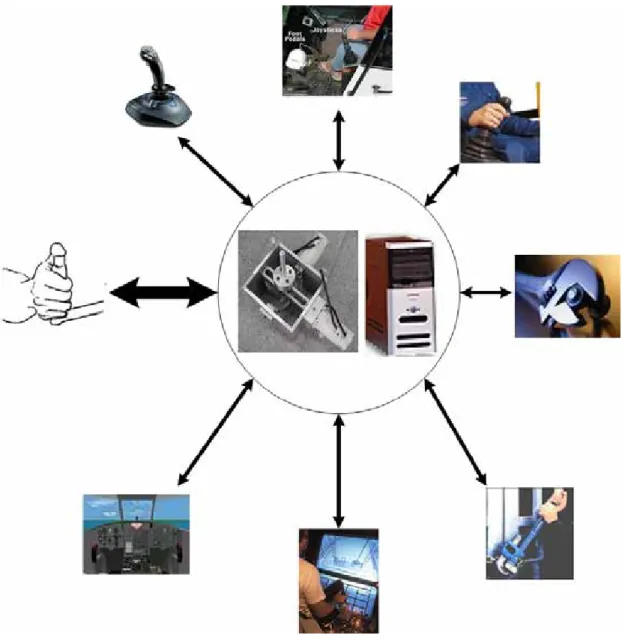
當使用者設定好虛擬環境參數後,即可經由整個虛擬操控器系統,模擬 出各式使用工具、操縱機械、或是駕駛交通工具等感覺,如圖 2.3 所示。
圖 2.3 操控器模擬系統之應用
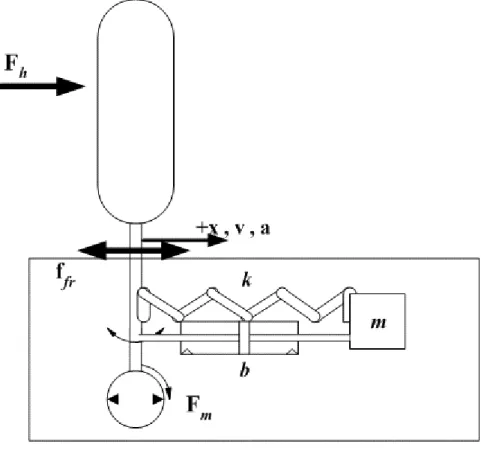
Hogan 於 1987 年提出阻抗控制理論(Impedance Control Theory)[12],用 來處理機械手臂碰觸物體表面所發生的情形,並且在 1989 年應用在人機介面 的互動控制上[13],我們則應用其理論來處理使用者在虛擬環境中與物件互 動,經由力回饋搖桿傳回的力量感受。只要我們利用系統鑑別以獲取系統本 身的彈性係數(stiffness)、阻尼係數(viscosity)、以及質量係數(mass),再代入 所要模擬的系統原件以上三種物理性質,就可以得到物理狀態(位移量、速 度、加速度)、馬達需要的出力、以及操作者施力(或者是使用者感受到的力) 之間的關係式。 首先先定義真實世界中搖桿系統本身的物理性質,令系統本身的彈性係 數為k,阻尼係數為b,質量係數為m,搖桿的位置為x,速度為v,加速度為a, 系統的摩擦阻力為ffr,使用者施加的力量為Fh,馬達出力為Fm;相對應於真實 世界,則定義所要模擬的虛擬世界物理性質,令模擬物件的彈性係數為K,阻 尼係數為B,質量係數為M,搖桿的位置訊號偵測值為X,速度為V,加速度 為A,虛擬的摩擦阻力為Ffr,使用者感受的力量與施加的力量同為Fh,根據參 考資[22, 23, 35],則在真實世界中以上的定義存在以下的阻抗關係式: m h v F F ma bv kx f v + = + + + fr (2.1) 而在虛擬世界裡我們期待能達成類似(2.1)式的虛擬阻抗關係式: h V F MA BV KX F V = + + + fr (2.2) 圖 2.4 顯示此兩種關係的示意圖。
假設量測到的物理量與實際值相等,即:x=X v, =V a, = ,結合(2.1)和(2.2)A 兩式,可得到馬達輸出力的方程式: ( ) ( ) ( ) m f v V F m M a b B v k K x f F v = − + − + − + r − fr V (2.3) 其中m、b、k 和ffr為系統常數,理論上先輸入需要模擬的虛擬質量M,虛擬阻 尼係數B,虛擬彈性係數K,以及虛擬摩擦力Ffr,只要能夠量測到位置x,速度 v,以及加速度a,就可藉由不同的阻抗元件及其組合,調變馬達的輸出力Fm, 模擬各種物理原件,如圖 2.5 所示。 圖 2.5 合成 M、B、K 模擬不同的出力情形 另外,若加速度不易量得(需要高精度的加速規),也可利用加裝在搖桿 上的力感測器,量得的搖桿與手之間的作用力 Fs,則Fs =Fh 且馬達出力會有 如下關係式: (m 1) v (m) Fm Fs bv kx ffr Bv Kx Ffr M v M v v ⎧ ⎫ ⎧ ⎫ ⎡ ⎤ ⎪ ⎪ ⎪ ⎨ ⎬ ⎨ = − + + + − ⎢ + + ⎥⎪⎬ ⎪ ⎪ ⎪ ⎢ ⎥⎪ ⎩ ⎭ ⎩ ⎣ ⎦⎭ (2.4)
若是在模擬中,物體的質量不重要,可將模擬物件的質量直接設定成搖桿系 統的自然等效質量(M=m),代入(2.4)式 v v Fm bv kx ffr Bv Kx Ffr v ⎧ ⎫ ⎧ ⎪ ⎪ ⎪ ⎨ ⎬ ⎨ = + + − + + ⎪ ⎪ ⎪ ⎩ ⎭ ⎩ v ⎫⎪ ⎬ ⎪⎭ (2.5) 則力感測值並不會影響馬達的力量輸出,只單純的分成真實世界的物理 力量與虛擬世界的虛擬力需求的差值。值得一提的是,假設把(2.5)式後半部設 為零,相當於希望搖桿模擬一個在虛擬環境完全不受力的情況,使用者將感 受到搖桿平順無阻力的移動,此時馬達需額外出力給使用者克服外界阻力, 其出力為: v Fm bv kx f fr v ⎧ ⎫ ⎪ ⎪ ⎨ = + + ⎪⎩ ⎬⎪⎭ (2.6)
2.3
基本阻抗元件模擬法則
運用前一節所推導出使用者透過力回饋系統與虛擬環境互動的關係式, 本節將進一步探把此互動分解成三種基本阻抗元件所帶給使用者的感受,分 別是推動一塊質量物體(mass)、在黏滯流體中運動(viscosity)、與推拉一個彈簧 (stiffness);此外牆面(wall)與通道(tunnel)皆是特殊的移動受限之物件感受,也 將於此節介紹。2.2.1 質量物體運動
牛頓第一運動定律說明,在無外力的影響下,靜者恆靜,動者恆以等速 度運動前進,而物體的慣性質量就是外力想改變物體運動速度的難易度,因 此要讓使用者感覺到物體的質量,必須讓搖桿有速度變化,亦即搖桿有加速 度,如此使用者才能感受到正比於加速度的力量。若只針對物體的質量,我 們將模擬物體的系統的黏滯係數B與彈性係數K以及摩擦力Ffr皆設為零代入 (2.3)式得到: ( ) v ( ) v fr v Fm m M a bv kx ffr m M bv kx f t v v ⎧ ⎫ ∆ ⎧ ⎪ ⎪ ⎪ ⎨ ⎬ ⎨ = − + + + = − ∆ + + + ⎪ ⎪ ⎪ ⎩ ⎭ ⎩ ⎫⎪ ⎬ ⎪⎭ (2.7) 上式的後半部項為永遠存在且是馬達需要提供的基本力,前半部則是比較真 實搖桿的等效質量與模擬物體的慣性質量,再決定馬達輸出力與加速度的關 係;極端情況為 m=M 時,馬達並不需要額外出力,搖桿本身的慣性就可以讓 使用者直接感受到慣性質量的感覺。2.2.2 黏滯流體運動
黏滯力的大小取決於與環境間的黏滯係數(viscosity),黏滯係數高會讓系 統位置狀態不易改變,而有黏滯的感覺(sticky)。而黏滯力隨移動速度增加而 變大,一方面會產生不易移動的力感,另一方面卻也是系統穩定的一大要素, 往後將會為此作介紹。 為了方便觀察,我們設定模擬一個與搖桿系統自然等效質量相等的物體(M=m , K=0),在一個黏滯係數為 B 的虛擬流體中移動,代入(2.4)式:
{ }
m v F Bv bv kx f v fr ⎧ ⎫ ⎪ ⎪ =− +⎨ + + ⎬ ⎪ ⎪ ⎩ ⎭ v (2.8) 與(2.6)式比較,(2.8)式後項就是模擬質量物體運動式,因此馬達在模擬質量物 體進入黏滯流體的額外出力 F 為(2.8)及(2.6)式的差: b b F = −B (2.9) 因此,若我們要模擬進入黏滯流體的感覺,只需讓馬達出力加入(2.9)式的額外 施力,就可以讓使用者感受到黏滯性。2.2.3 彈簧運動
每個物體皆有其剛性(stiffness),彈簧是一個物體剛性的具體表現,根 據虎克定律(Hooke’s Law),彈簧施力隨著與基準點的距離差成正比。要模擬 一個端點固定的彈簧我們先給定在虛擬環境中彈簧放鬆的自然狀態基本點 X0=0,同樣的為簡化方便,我們設定模擬與彈簧碰觸的物體質量與搖桿系統 自然等效質量相等。 m v F Kx bv kx f v ⎧ ⎫ ⎪ ⎪ =− +⎨ + + ⎪⎩ fr ⎬⎪⎭ x (2.10) 類似 2.2.2 所討論的,馬達模擬碰觸彈簧的額外出力 Fk為(2.10)及(2.6)式的差 k F = −K (2.11)因此,若我們要模擬碰觸彈簧的感覺,只需讓馬達出力加入(2.11)式的額外施 力,就可以讓使用者感受到彈簧的彈性。
2.2.4 牆面
牆(wall)表現出的行為是依據牛頓第三運動定律,作用力等於反作用力, 它有限制運動以及回饋給使用者施力相同的力量大小,要將牆面的行為表現 出來可利用力訊號控制,即: m h F =− =−F Fs (2.12) 但若利用(2.12)式,完全依靠力訊號回饋來模擬牆面,對於力感測器的精密度、 解析度、訊號取樣頻率、以及訊號傳遞的延遲都將要求極高,影響了牆面的 穩定度,因此有些研究這方面的專家利用高阻抗物件來模擬牆面[8,22,23]。另 外,Rosenberg 等人以心理學認知感受為基礎,解析三種阻抗參數對模擬牆的 真實度的影響[25]:高黏滯係數可以讓剛碰觸牆的瞬間,感受到直接碰撞的感 覺(crispness),而高彈性係數會給予使用者在剛碰觸牆的瞬間,感受到彈回的 感覺(bouncy),但利用高彈性係數來模擬牆才能讓使用者感受到牆的硬度 (hardness),故模擬一個剛性(stiffness)高的物體最似牆面。綜合上述討論,結 合高彈性與高黏滯係數阻抗元件來模擬牆面感覺較接近真實感受: Fm K x B x x 0 t ∆ = − ∆ − ∆ 當 ∆ > (2.13)2.2.5 通道
通道概念與牆類似,兩者都具有運動限制,牆面的是二維平面的運動限 制,而通道則限制物體在一維方向運動。所以要實現通道的運動行為,最直 接而有效的方式就是利用兩面平行牆來限制搖桿在一維方向運動,如圖 2.6 所 示。 圖 2.6 由雙牆面形成通道 由 2.2.4 對牆面的設定,我們可將兩面平行牆直接等效於一個高彈性、高 黏滯係數的雙向彈簧阻尼,如圖 2.7 所示。讓搖桿在平行彈簧阻尼的方向受到 限制,但可以在垂直彈簧阻尼的方向自由移動,達到通道的效果,而通道寬 度可由設定無阻力的位移量來決定。圖 2.7 利用雙向彈簧阻尼形成的通道
2.4
阻抗模擬精確度
對利用數位取樣的模擬系統來說,由於取樣週期、資料的量化、以及時 間的延遲等使得在模擬真實世界連續系統的物體時,有其模擬的極限,而一 套互動式力回饋設備的性能通常決定於其所能模擬的物體阻抗大小的範圍, 而這個範圍通常被系統本身裝置的物理性質所影響。一方面模擬的阻抗物件 的精確度受到如馬達的非線性輸出以及感測器的解析度等影響,而另一方面 系統的取樣時間、感測器解析度還影響了系統模擬的穩定度[1, 9, 20]。利用數位模擬系統模擬一個虛擬物體,由於數位系統取樣存在的量化誤 差,將造成模擬的物體與期望的物體物理性質有一定的差距,假設模擬一個 簡單的虛擬彈簧,首先定義期望的虛擬彈性係數為Kd,真正感覺到的真實彈 性係數為Kr,彈簧模擬誤差為err_k,則彈簧模擬誤差為err_k可表示成: _ Kr Kd err k Kd − = (2.14) 由 2.3 節的模擬法則可知我們需要模擬的馬達輸出力Fm 為: Fm=−K Xd (2.15) (2.15)式中的 X 為量測到的位移量,若我們假設量化最小單位為δ,量化誤差 為ε,則搖桿實際的位移量 x: x ( ) - ( ) 2 X t t 2 δ δ ε ε = + ≤ < (2.16) 而使用者真正感覺到的彈性 Kr 是彈力隨實際位移量影響: [ ( Fh=−K xr =−Kr X+ε t)] m (2.17) 在靜止狀態,無其他外力下
F
h=
F
,所以由(2.15)式與(2.17)式可得: ( ) Kr X t Kd X ε + = (2.18) ( ) _ - ( ) 2 Kr Kd t err k t Kd X ε 2 δ ε δ − = = ≤ < (2.19) 由(2.19)式可知彈簧的最大模擬誤差正比於量化單位的大小,且工作的位移量越小將使得模擬的誤差變大。類似於彈性係數,黏滯係數與慣性質量在模擬 上也有其資料量化所產生的誤差存在,以相同的推導公式可得: ( ) _ - 2 ( ) Br Bd t err b t Bd V ε 2 δ ε δ − = = ≤ < (2.20) ( ) _ - 2 ( ) Mr Md t err m t Md A ε 2 δ ε δ − = = ≤ < (2.21) 黏滯係數與慣性質量的最大模擬誤差,分別隨操作時的操作速度與加速度增加而 增大。
2.5
系統穩定度分析
評估一個系統是否穩定可以由這個系統的能量為收斂還是發散來判斷, 在真實世界中的基本阻抗元件都是被動性元件,只會儲存或是消耗能量,不 會主動提供能量,可是經由數位系統模擬的虛擬阻抗元件卻可能因為取樣時 間以及零階保持器的關係(zero order hold)變成主動原件,以下用一個彈簧模擬 的例子說明這個現象。 圖 2.8 為模擬使用者經由壓縮虛擬彈簧再放鬆的所得的結果示意圖,其中 每一次的位移量為操作速度乘以取樣週期。由於位置編碼器取樣以及零階保 持器的關係,每週期系統的輸出位移與輸出力量值都會在一整個取樣週期保 持一定的值,而能量的表示為施力大小與位移的乘積,所以當使用者壓縮虛 擬彈簧時,彈簧系統會儲存虛線以下面積大小的能量,但當使用者放鬆彈簧確會釋放出實線以下面積大小的能量,兩者之間的差異顯然代表放鬆彈簧會 比壓縮彈簧產生額外的能量,也是造成虛擬彈簧系統的不穩定的主素。
圖 2.8 虛擬彈簧能量變化示意圖
接著將上述虛擬彈簧的例子系統化,其系統方塊突如圖 2.9 所示:
X(s)為系統輸入位置訊號,F(s)為輸出訊號為力量,則轉移函數為[35]: 2 ( ) ( ) 2 2 1 ( ) ( ) 2 sT ms bs Ke G s m KT s b KT s K − + = ⎡ + + − ⎢ ⎥ ⎣ + ⎦⎤ (2.22)
根據奈式穩定準則(Nyquist stability criterion),(2.22)式穩定條件必須所有的極 點都落在左半平面上,亦即分母多項式的解其實數項必須皆小於零。(2.22)式 的極點為: 2 1 2 ( - ) ( - -4( 2 )) 2 2 KT b b KT m KT m KT ± + + 故模擬的彈簧係數 K、取樣週期 T、與系統黏滯係數 b,必須滿足
KT
<
b
的 關係式系統才算穩定,這個關係式還存在一個常數項 C,使穩定關係式修正為KT
<
cb
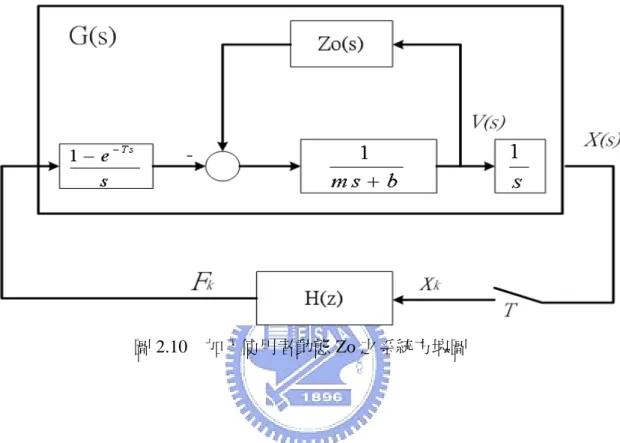
,Minsky 對此常數項的建議值為 2 [20],所以關係式重新修正為: 2 KT b> (2.23) 根據(2.23)我們可看出系統本身的黏滯係數 b 有助於系統穩定,且模擬的 彈性係數和取樣週期越小系統會較穩定,模擬彈性係數越小代表馬達出力在 一定週期出力將減小,而取樣週期變小則代表與馬達施力的乘積也跟著變 小,因此將彈簧壓縮再放鬆後的主動釋放能量也減少,系統穩定度提高,此 皆符合圖 2.8 所闡述的觀念。 在作上述的穩定性分析時我們並沒有考量到使用者介入,若整個動態系 統加入人為因素將會使得系統穩定性難以預測,因為人的動態表現變化範圍 非常大[13],且隨當時的使用者的動態傾向使穩定系統或是故意造成系統動 盪,都會使穩定度的估測結果造成極大的差異。假使將使用者的動態當成一個未知系統Zo(s),包含入搖桿的動態之中,將真實世界的系統當成G(s),模擬 的阻抗狀態作為迴授系統H(z),如圖 2.10 所示,那麼我們可以利用被動性理 論來分析此系統穩定度。
圖 2.10 加入使用者動態 Zo 之系統方塊圖
根據 Colgate 所提出的被動性理論(Passivity criterion)分析[9],數位取樣系 統要能滿足被動性,必須滿足下式: 1 Re{(1 ) ( )} 2 1 cos 0 j T j T N T b e H T ω ω ω e ω ω − > − − ≤ ≤ (2.24) 其中
ω
N=
π
T
為奈氏頻率(Nyquist frequency),假設模擬的虛擬阻抗是一個 彈簧與阻尼系統(spring-damper system),虛擬的彈性係數為K,黏滯係數為 B,則迴授系統H(z)為: 1 ( ) z H Z K B Tz − = + (2.25)將(2.25)式代入(2.24)式,則: 1 1 Re{(1 )( )} 0 2 1 cos j T j T N j T T e b e K B T Te ω ω ω ω ω ω − − > − + − ≤ ≤ (2.26) 令ejθ =cos( )θ + jsin( )θ ,上式可簡化為: cos 2 N T b> K−B ωT 0≤ ≤ω ω (2.27) 觀察(2.27)式發現,假使我們要增加模擬系統的阻抗值且仍然能維持系統的被 動性,可以增加取樣的頻率或是加裝阻尼器提高搖桿系統的物理黏滯係數。 至於模擬的黏滯係數 B 對系統的影響則根據
ω
當時的狀況,當0 2 N ω ω ≤ < 時,模擬的黏滯係數 B 會幫助系統穩定,但當 2 N N ω ≤ ω < ω 時,模擬的黏 滯係數 B 將會破壞系統穩定性,至此我們已完成了系統的穩定性分析。第三章
虛擬操控器之軟體系統
為了能夠發展一套軟體系統來自由規劃一多功能的虛擬操控器,我們需 要一些基本模組作為操控器的組合工具,這類基本模組必須要有能夠讓力回 饋搖桿依照欲模擬的對象在事先規劃好的工作空間上運動的能力,所以必須 要有導引搖桿運動軌跡的功能,且必須要能夠阻擋力回饋搖桿移至非正常的 工作空間區域上,基於以上幾項條件,在 2.2.4 和 2.2.5 節討論的牆面和通道 將是不可或缺的工具,就如同組合積木一樣,越多不同形狀的積木就可以拼 出越精緻、越複雜的結構,只要我們能夠在此套系統上模擬出各種虛擬牆或 虛擬通道,那麼透過其自由組合所能規劃出的操作空間就越廣泛,甚至若能 考慮虛擬阻抗的變動性並找出其相對應於真實世界的操作感受,將其與各種 虛擬牆和通道結合,便能使操控器能模擬出的對象更多樣、多元化。 例如實驗室在以往已利用一個水平和三個垂直的虛擬通道結合,模擬出 手排汽車的排檔器,而如能再根據鍵盤或滑鼠對應的狀態關係,動態地出現 包圍其六個檔位的環形或方形虛擬牆,便能模擬離合器踩合或放鬆使手排檔 不能進檔退檔的操作感覺;利用環形通道配合通道內高黏滯阻尼係數,好似 模擬推動一個阻力很大的磨坊;而環形和直線通道結合,再加上通道依照搖 桿移動狀態內變化黏滯阻尼係數,甚至能模擬操控一個扳手扳動由鬆至緊的 過程。法則為基礎,討論虛擬操控器之軟體系統實現。首先需要介紹力回饋搖桿與 虛擬環境之間該如何互動的控制策略;接著我們設計能夠實現多功能虛擬操 控器的各種可組合的力感工具,如正向、非正向、或圓形的虛擬牆、虛擬通 道等;最後將對虛擬阻抗的動態特性分類討論之。
3.1
控制策略
力回饋搖桿的主要功能是利用搖桿本體輸出機械功率賦予使用者各種力 覺感受,當操控搖桿與虛擬環境互動時,使用者可藉由各種不同的力覺感受, 約略猜測所觸碰的虛擬物體其軟硬程度、形狀、甚至大小等。然而,對於力 回饋搖桿的要求除了在力感上的模擬盡量逼近真實外,另外一項重點則是能 夠讓力回饋搖桿在我們所期望的虛擬環境位置輸出一個適當的力感,如此一 來才有辦法讓使用者感受到好似真的在操作一個所欲模擬的工具。 由於使用者是用手握住力回饋搖桿使其運動接近虛擬環境中的阻抗元 件,我們可以把搖桿假設成虛擬環境中的一個點,而考慮點-線的碰觸方式, 以下將針對一次和二次多項式的情形作說明。 若阻抗元件的形狀表面可由一次多項式構成,我們以下列直線方程式 表示: L ( , ) 0 L x y = ax + by + c = (3.1)其中 ( , )x y 代表物體在 X- 座標平面的位置, ( , 係直線的法線向量,c為其與 原點的偏移量,假設 Y a b) 0 0 ( ,x y )代表搖桿在虛擬環境中的座標位置,在此為了方便 說明,讓a b, 均為大於零的實數,那麼將( ,x y 帶入(3.1)可得到以下三種情況: 0 0) If L x y( ,0 0)<0:搖桿在直線 左方 L (3.2) If L x y( ,0 0)=0:搖桿在直線 線上 L (3.3) If L x y( ,0 0)>0:搖桿在直線 右方 L (3.4) 由於座標系統 X 方向是由左向右增加,所以我們直觀地假設搖桿由左向右移 動碰觸到虛擬阻抗,故碰撞情形可以由下列表示: If L x y( ,0 0)<0:搖桿處於自由狀態 (3.5) If L x y( ,0 0)=0:搖桿碰觸阻抗表面 (3.6) If L x y( ,0 0)>0:搖桿侵入虛擬阻抗 (3.7) 其中,於自由狀態下,搖桿的操控移動不會有任何阻礙,當碰觸虛擬阻抗的 表面時,則推進時會感受到抵抗力量,而在侵入虛擬阻抗的狀態下,則是會 被其所推擠,力量的抵抗會維持到搖桿回到自由狀態為止,假使搖桿移動方 向是由右向左碰觸到虛擬阻抗,則(3.5)和(3.7)式狀態將會對調。 接下來探討阻抗元件的形狀由二次封閉曲線所構成時的判斷法則,我們可以 以一個簡易的二次封閉曲線方程式表示: 2 2 ( , ) 0 Q x y = ax + by + cxy + d = (3.8)
標位置,將( ,x y 代入(3.8)式中搖桿與虛擬阻抗互動會有以下情形: 0 0) If Q x y( ,0 0)>0:搖桿處於自由狀態 (3.9) If Q x y( ,0 0)= :搖桿碰觸阻抗表面 0 (3.10) If Q x y( ,0 0)< :搖桿侵入虛擬阻抗 0 (3.11) 至於發生碰觸後力回饋搖桿的動態反應狀況則與一維的情形極為類似,有了 上述兩種準則,往後對於多樣性阻抗的分析將有極大的幫助。
3.2
虛擬牆
在 2.2.4 曾介紹到牆面的行為符合牛頓第三運動定律的物理反應,即作用 力 等於反作用力 ,然而希望力回饋系統直接反應使用者施力作為牆面 模擬對於硬體設備要求極高,故我們結合高彈性係數和阻尼係數的阻抗元件 實現模擬一個牆面反彈的力感,這就是一種虛擬(virtual wall)牆的概念,如圖 3.1 所示,並希望與實際的牆面感覺差異盡量能夠最小。 act F Frea 由於彈性係數 K 值的增加可以提高剛性,所以高彈性係數將是實現虛擬 牆最主要直接的方式,然而究竟需要多大的 值呢?這是一個心理物理學 (psychophysics)上的問題,亦即身體感官雖然接受外在相同物理量的刺激,但 會因為各人內在心理主觀印象的影響,而有不同的認知並產生不同的反應; K 根據 Colgate 的建議其值約在為 2000~8000 N/m 就能給予使用者相當不錯的表現[8]。但虛擬牆究竟還是由彈簧組成,符合第二章所提及的彈簧穩定度分 析的特性,故我們需要配合一個阻尼係數來增加系統的穩定度,接下來將介 紹各種虛擬牆的呈現方式。 圖 3.1 虛擬牆示意圖
3.2.1 正向虛擬牆
顧名思義,一個正向的虛擬牆就是僅以平行於卡式座標的 X 方向或是 Y 軸方向出現,如圖 3.2 所示,所以搖桿的操控點與虛擬牆碰觸的判斷條件只需 要考慮一個維度的自由度即可。 以平行 Y 軸的虛擬牆為例,假設搖桿位置為( ,x y ,虛擬牆表面邊界數0 0) 學式為x=c,使用者操控一個力回饋搖桿由左慢慢往右移動,將( ,x y0 0)帶入 x=c有三種情況:x0< 代表搖桿可任意移動不受限制;c x0 = 代表接觸到虛c > 代表搖桿侵入虛擬牆,此時的虛擬牆會產生力回饋抵抗使用者施力直到搖桿退出牆面,而力感回饋 的大小根據搖桿侵入的深淺決定: 0 ( ) x F = −K x − −x BVx (3.12) 其中K為模擬虛擬牆所設的彈性係數,B 為模擬虛擬牆所設的阻尼係數,同 理如換成一平行 X 軸的虛擬牆,其數學式為 y= ,則在c 時侵入牆面並 得到一回饋力: 0 y > c y 0 ( ) y F = −K y −y −BV (3.13) 圖 3.2 一維正向虛擬牆示意圖: (a) 平行 Y 軸的虛擬牆 (b) 平行 X 軸的虛擬牆
3.2.2 非正向虛擬牆
如果考慮一個與 X 軸、Y 軸皆不平行,而是與水平方向有一個夾角θ, 如圖 3.3 所示,那麼就不能用正向虛擬牆的法則判斷,而是必須將輸入的位置、速度等資訊進行座標軸轉換[35],才能計算出兩軸馬達正確的力量命令。 圖 3.3 非正向虛擬牆示意圖 如圖 3.4 所示,假設 X 軸為原本阻抗物件模擬面,L 軸為 X 軸旋轉了θ 度,是新的非正向虛擬牆模擬表面,而系統傳回的搖桿位置為點 ,其 與 L 軸垂直距離為向量 ,而系統需要與施力有關的兩軸距離分別為 與 ,由幾何推導可得d: 0 0 ( , ) P x y d lx ly 0 cos sin o d = θ×y − θ× x (3.14) 而lx 與 ly又分別為:
[
0]
sin cos sin o
lx= θ× θ×y − θ×x (3.15)
[
0]
cos cos sin o
ly= − θ× θ×y − θ×x (3.16)
分別給予兩軸對應的施力,以實現一個非正向的虛擬牆行為,至於速度項與 加速度項,分別為位移項的時間微分與二次微分,因此也可套用相同的公式。 圖 3.4 座標軸轉換
3.2.3 圓形虛擬牆
由於圓形在二維座標空間為一個二次封閉曲線,所以實現圓形虛擬牆基 本上有兩種形式,其一為內圓形虛擬牆,另則為外圓形虛擬牆,如圖 3.5 所示。 以內圓形虛擬牆為例,方形區間為搖桿可自由活動空間,但是只要經過中間 牆的表面,就會感受到被推擠的反彈力,無法繼續往內移動;而外圓形虛擬 牆的表現行為剛好相反,搖桿只有在圓形區間部分能夠自由移動,無法穿越 圓形表面到達外面的區間。 要推導出圓形虛擬牆的力感特性,首先必須瞭解圓的數學基本模型,一個圓形虛擬牆表面的數學方程式如下: 2 2 2 x +y = r (3.18) cos , sin x= ×r θ y= ×r θ (3.19) 1 tanθ=y , θ =tan ( )− x x y (3.20) 其中 ( , )x y 為圓上任一點在 座標平面的位置, 為圓形虛擬牆半徑,θ為 以圓心向圓上任何一點出發的向量與 X 軸的夾角。接著我們分別介紹內外圓 虛擬牆之模擬方法。 X-Y r 圖 3.5 圓形虛擬牆示意圖:(a) 內圓形虛擬牆 (b) 外圓形虛擬牆
A 內圓虛擬牆
假設搖桿在X-Y座標平面的位置為( ,x y0 0),向量P=( ,x y0 0)代表由圓心 出發向搖桿位置延伸的向量,搖桿侵入牆面所受到的 X 方向阻擋力為F 、Y方向阻擋力 ,兩者的合力構成實際的阻擋力。由圖 3.6 我們可看出 和 的施力方向與搖桿目前位置向量 y F Fx Fy 0 0 ( , ) P= x y 同向,且Fx和F 的比值與y x 和0 的比值有以下關係: 0 y 0 0 x y F x F = y (3.21) 圖 3.6 搖桿侵入內圓虛擬牆之施力方向 為了判斷力回饋搖桿會在何處侵入牆內,我們將搖桿目前位置代入(3.18): 2 2 0 0 2 0 x +y = r (3.22) 上式相當於以搖桿目前位置( ,x y0 0)做出一個與虛擬牆表面相同圓心的圓形, 其半徑為 ,若r0 r0 > r,則搖桿在牆外;r0 = ,則搖桿剛碰觸到牆面;r , 則表示搖桿已經侵入牆內,如圖 3.7 中黃線部分,此時需產生適當的回饋力給 予搖桿使其退至牆面外。藍線部分為搖桿深入牆面之形變量,根據(3.21)式我 0 r < r
們可利用向量分量原理分別求出 X 軸方向和 Y 軸方向應對應的施力: 0 0 0 0 0 0 ( ) ( ) x x y y x F r r K V r y F r r K V r = − × − × = − × − × B B (3.23) 圖 3.7 內圓虛擬牆施力分解圖
B 外圓虛擬牆
外圓虛擬牆與內圓虛擬牆概念相同,只不過搖桿的活動區間反而是能自 由地活動於圓形牆內部,但當移動到圓形牆外面時會受到推擠直到搖桿狀態 回復到沒侵入牆內時,如圖 3.8 所示。圖 3.8 搖桿侵入外圓虛擬牆施力方向 因此我們只要把內圓虛擬牆的概念重新運用一次,不過條件相反,亦即 當 時搖桿才侵入牆面,根據(3.21)和(3.23)式我們可推得外圓虛擬牆的施 力為: 0 r >r 0 0 0 0 0 0 ( ) ( ) x x y y x F r r K V r y F r r K V r = − − × − × = − − × − × B B (3.24)
3.2.4 橢圓形虛擬牆
由於圓為橢圓的特殊例子,所以分析橢圓形虛擬牆的方法也與圓形極為類 似,其概念如圖 3.9 所示,一個扁橢圓方程式為:2 2 2 2 1 x y a + b = (3.25) 其中a為橢圓之長軸、b為橢圓之短軸。判斷力回饋搖桿是否侵入橢圓形虛擬 牆內部作法與圓形虛擬牆一樣,只需將(3.18)式替換成(3.25)式並把搖桿目前位 置 ( ,x y0 0) 代 入 , 若 2 2 0 0 2 2 1 x y a + b > 則 侵 入 外 橢 圓 牆 , 反 之 若 2 2 0 0 2 2 1 x y a + b < 則侵入內橢圓牆,再根據向量法則給於 X 方向和 Y 方向適 當的回饋力即可。至於長橢圓只需將(3.25)式中 、b調換,便能使用相同分 析。 a 圖 3.9 內外橢圓虛擬牆示意圖
3.3
虛擬通道
回顧 2.2.5 節曾提過虛擬通道的概念是利用兩面硬質虛擬牆實現其功能, 所以基本上其動態特性跟虛擬牆大同小異,最大的不同點,是在於虛擬通道 對於搖桿的運動限制比虛擬牆更為嚴格,就直線型的虛擬通道而言,能將搖 桿從二維活動空間限制成一維運動方向,而對於圓形或橢圓形虛擬通道,雖 然搖桿的活動空間大體上還是擁有兩個自由度,但其工作區間已經大大的受 到限制了。至於虛擬通道的寬度設定,若是一個正向或是非正向的通道,可 以利用兩面平行虛擬牆設置的距離來決定;而若是環性通道則可利用內外圓 半徑的差來決定其通道寬度。3.3.1 正向通道
正向通道顧名思義就是利用兩面正向且互相平行的牆來完成,藉由兩面 平行牆相距的距離來設定其通道的寬度大小,可分為垂直方向和水平方向的 通道,如圖 3.10 所示。 圖 3.10 一維正向通道示意圖3.3.2 非正向通道
利用兩面經由座標轉換後轉了一個角度θ的非正向虛擬牆組成,如圖 3.11 所示,其原理與正向通道一樣,而正向通道亦是非正向通道的特殊情況,亦 即θ =0°和θ =90°時,分別代表水平和垂直兩種通道。 圖 3.11 非正向通道示意圖3.3.3 環形通道
利用兩個不同半徑大小的圓形虛擬牆所構成的通道為環形通道,如圖 3.12 所示。假設搖桿目前位置為( ,x y ,內圓形牆半徑為 ,外圓形牆半徑為0 0) , 則根據(3.22)式可得以下三種結果: 1 r r2 If r1< <r0 r2:力回饋搖桿在環形通道內,活動不受限制If r0 <r1 :力回饋搖桿侵入內圓虛擬牆,給予(3.23)式之力感 If r0 >r2 :力回饋搖桿侵入外圓虛擬牆,給予(3.24)式之力感 如此一來我們就完成一個環形虛擬通道,至於通道大小 可利用外圓虛擬牆面 和內圓虛擬牆面的半徑差,即 d 2 d = − 求得。 r r1 圖 3.12 環形通道示意圖
3.4
虛擬阻抗動態特性
雖然有了各式各樣的虛擬牆和虛擬通道,但這些阻抗只能以靜態的方式 存在於某些規劃好的區間,當搖桿碰觸到這些阻抗物體,則會受到適當的反 餽力;若否,則無法對搖桿產生任何影響力。為了能夠更精確的模擬各器械 給使用者的操作感受,我們必須探討虛擬阻抗的動態特性。3.4.1 虛擬阻抗值變化
根據不同的變因,設計一套流程使得虛擬阻抗本身會因為這些因素的改 變而產生我們所期望的變化。例如以時間的變化適當地調整虛擬牆彈性係 數,可以模擬觸碰一個物體由軟變硬、或是由硬變軟的感受;由於阻尼可以 依照搖桿移動的速度快慢給予操縱者一個對應的反方向阻抗力,故以搖桿移 動距離總和為變數增加虛擬通道內的阻尼係數,可以模擬在越來越稠密的流 體中移動、或是在摩擦力越來越大的工作環境中移動。3.4.2 虛擬力感環境變化
以位置對應方式產生阻抗元件的好處是使用者能以較直覺的感受操縱搖 桿,但也有其缺點就是模擬的工作區間將受限於搖桿本身的活動範圍,使得 虛擬操控器的應用變的狹窄,如果能根據一些外部設定的變數來改變整體力 感環境,如距離、時間、外部控制器,將能擴充其實用性與可塑性。例如利所構成,使用者操縱力回饋搖桿與這樣的虛擬環境中互動,若是移動到不是 事先設計好的的通道則會被虛擬牆給阻擋,而當使用者依照規劃好的通道循 序漸進完成某些條件,譬如搖桿目前位置到達過關地點,又或者經過一段很 長的時間,整個迷宮的通道將會被二度規劃,與遊戲之初排列完全不同。這 樣的動態變化好像使用者在迷宮遊戲中由於達到過關條件到達下一關一樣, 只要在程式設定時不斷地增加動態通道的個數,就可以讓整個搖桿工作空間 作無限的想像擴大,甚至還可利用由簡單至繁瑣的變化來模擬遊戲不斷的增 加其難度。
第四章
硬體機構與系統鑑別
本章的目的在介紹虛擬操控器的硬體部分,主要為一組擁有兩個自由度 的力回饋搖桿裝置,可再細分為主體機械結構、動力元件以及力感測裝置, 整體硬體架構如圖 4.1 所示。此搖桿為交通大學電控所人與機器實驗室所開發 [34],也是整個虛擬操控器模擬系統直接與使用者互動的部分。為了能夠進一 步求得此硬體系統的各項基本參數,例如搖桿最大輸出力量、取樣資料的解 析度以及感測裝置靈敏度等,作為實際模擬時的依據,以發揮最佳的操作效 果, 我們將於後逐一分析之。
4.1 搖桿傳動機構
此力回饋搖桿的機械結構如圖 4.2(a)所示,其傳動裝置一為半圓長條型鐵 塊(Y 軸方向),另一為長直條型鐵塊(X 軸方向),半圓形的長條鐵塊中央有 一長溝可讓搖桿下端穿過,而長條形鐵塊則將中央搖桿握把固定住,兩個鐵 塊一端點連接馬達傳輸動力,另一端點則以滾珠軸承固定在機構外殼上。當 X 軸馬達轉動時,會帶動長條鐵塊旋轉,使得搖桿握把會隨之在 X 軸方向轉動 (直接連動),而 Y 軸馬達轉動時 ,會帶動半圓長條形鐵塊,進而牽動搖桿握把下端造成在 Y 軸方向轉動。這 樣的搖桿結構設計可以增加力回饋搖桿的活動範圍,並減少傳統單桅式搖桿 兩傳動軸間機構干涉和摩擦等問題。圖 4.2(b)顯示力回饋搖桿的工作空間,X 軸的活動角度為 70°,而 Y 軸的活動角度為 80°,X 軸與 Y 軸馬達對於握把位 置的施力力臂長度為 200mm,因此 X 軸與 Y 軸所能模擬的工作空間分別約為 243.3mm 與 279.3mm。 (a) 搖桿主體機械結構 (b) 工作空間 圖 4.2 力回饋搖桿(a)主體機械結構 和 (b)工作空間4.2 搖桿動力元件
為了提高力回饋搖桿動力元件的精確度與輸出轉矩,我們採用交流伺服 馬達作為搖桿的動力來源,本套系統使用日本松下公司(Panasonic)所生產 的型號為 MSMA041A1E 的交流伺服馬達和型號為 MSDA041A1A 的控制驅動 器,並且搭配建昇自動化公司所生產的型號為 NCC-9322 DAC 的馬達控制介 面卡作為馬達訊號輸出與命令輸入之用。 表 4.1、4.2 顯示交流伺服馬達與控制驅動器的規格資料,其中顯示馬達 的最大轉矩為 3.8 N/m,而馬達位置編碼器的解析度為 2500 Pulse/轉 ,我們可 以大概求出搖桿機構能給予使用者最大的力量感受,以及位置訊號的解析 度。已知馬達的施力力臂長為 200mm,透過下式: 馬達輸出力矩(N - m) 手在握把端感受到的力量(N)= 馬達施力力臂(m) (4.1) 可求得使用者透過力回饋搖桿得到最大的力感為 19N(約 1.94 kg),而工作空間 半徑等於馬達旋轉中心距握把(使用者感受位置),其長度約 200mm,透過下 式: 轉角解析度(P/rev) 位置訊號解析度(P/m)= 2π×半徑(m) (4.2) 得位置訊號解析度約為 1989.4(Pulse/m),約等於 2(Pulse/mm), 亦即每釐米約 有 2 個計數輸出。至於馬達控制卡的規格可由表 4.3 得知,其最大取樣頻率為 1MHz,比起之後電腦模擬每筆訊號處理的速度(約 1kHz)已綽綽有餘。項目 規格 額定電壓 100-115 V 50/60 Hz 額定/最大轉速 3000/4500 rpm 額定/最大轉矩 1.3/3.8 N/m 額定功率 400 W 編碼器解析度 2500 Pulse/rev 重量 1.6 kg 表 4.1 Panasonic MSMA041A1E 交流伺服馬達規格 項目 規格 控制模式 轉矩模式 轉矩控制信號 3V / 100%額定轉距 計數器輸出 10000 count/rev 轉矩量測 3V / 100%額定轉距 表 4.2 Panasonic MSDA041A1A 控制驅動器規格 項目 規格 類比輸出電壓 -10 ~ +10 V 輸出阻抗 0.1 Ω 轉換時間 1 µs 解析位元數 13 bits 計數輸入範圍 24 bits 表 4.3 健昇自動化 NCC-9322 DAC 馬達控制卡規格
4.3 系統鑑別
第二章曾提及虛擬操控器模擬系統的四個重要物理參數,分別為彈性係 數(stiffness)、黏滯係數(viscosity)、慣性質量(mass)、以及摩擦力(friction), 以下我們將一一推導。 關於系統摩擦力,我們分別在 X 軸方向與 Y 軸方向輸入一個穩定增加的 力量訊號,以求得最小克服摩擦力而運動的力量值,由圖 4.3 可看出 X 軸最大 靜摩擦力為 0.17 N,Y 軸最大靜摩擦力約為 0.20N。而動摩擦力約略小於最大 靜摩擦力[35]。 (a) X 軸摩擦力測試曲線 圖 4.3 摩擦力測試曲線:(a) X 軸方向 (b) Y 軸方向圖 4.3 摩擦力測試曲線(continued):(a) X 軸方向 (b) Y 軸方向 對於搖桿系統的阻抗模型,我們以最基本的頻率響應法(frequency-response analysis)來分析[17,34] ,其優點是以直觀的物理現象來闡釋模型的頻率轉移函數 (transfer function),首先我們定義搖桿單軸的轉移函數 G(s)為 2 ( ) 1 ( ) ( ) X s G s F s ms bs k = + + (4.3) 其中X s 為由編碼器取得搖桿操控位置的計數輸出, F(s)表示輸入的力量電( ) 壓命令。我們以圖 4.4 來說明頻率響應法的原理,即輸入系統不同頻率的弦波 信號(sinusoid),如 ( ) cos u t = α ωt (4.4)
(4.5)中α為信號的振幅,角頻率ω可自行選定,則此系統的輸出為 ( ) ( ) cos( ) ( ) y t = α G jω ω φt+ +n t (4.5) 其中ψ=argG(jω)為系統所造成的相位落後, 為雜訊(noise)成分。觀察(4.5) 式可發現系統於角頻率ω時的增益及相位特性,因此若輸入系統各種角頻率 的正弦信號,則可得多個角頻率點的增益與相位特性,藉由其特性於 Bode 圖 上的表現,可以使用圖形表示其頻率轉移函數。 ( ) n t 圖 4.4 頻率響應法的原理 我們輸入系統 1~65 Hz 之間各種不同頻率的正弦信號,如 (4.4)式所示,其 中信號振幅α 為 1/3 額定力矩,對應的系統計數輸出振幅如圖 4.5 中的星狀記號 (∗)所標示。根據圖 4.5,我們可估計系統 X 軸的轉移函數為: 6 2 5 4 1 ( ) (1.971 10 ) (6.307 10 ) (3.075 10 ) x G s s s − − = × + × + × −
系統 Y 軸的轉移函數為: 6 2 5 4 1 ( ) (1.8 10 ) (5.941 10 ) (3.276 10 ) y G s s s − − = × + × + × − (4.7) 由於系統輸入的訊號為電壓訊號(V),我們必須轉換為一般的力量單位(N),由表 4.1 與表 4.2 所得到的馬達與搖桿機構規格,額定電壓 3V,額定轉距 1.3 N-m, 力臂 0.2 m,因此電壓訊號轉換成力量單位的比例係數λf 為 1.3( ) 2.17( ) 0.2( 3( f λ = × 額定轉矩 N V 力臂長) 電壓值)= (4.8) 而輸出訊號為馬達計數器,也需要轉換為一般的長度單位(m),由表 4.2 馬達計 數器解析度 10000 count/rev,且力臂長為 0.2 m,故計數器訊號轉換成長度單位 的比例係數λp 為 4 2 0.2( ) 1.256 10 ( ) 10000( p π λ = × × 圓週長 = × − m count 計數器解析度) (4.9) 將(4.6)以及(4.7)式所得的系統彈性係數 k、阻尼係數 b、和慣性質量 m 值乘上比 例係數λ,其中λ為 4 1.752 10 f p λ λ λ = = × (4.10) 可得力回饋搖桿裝置物理阻抗參數值,如附表 4.4 所示。
X 軸方向 Y 軸方向 慣性質量 ( g ) 33.5 31.5 阻尼係數 (N-sec/m) 1.105 1.041 彈性係數 (N/m) 5.38 5.732 表 4.4 力回饋搖桿裝置物理阻抗參數值 系統增益量 (d b ) (a) X 方向頻率響應(rad/sec) 系統增益量 (d b ) (a) X 方向頻率響應 (a) X 方向頻率響應 (a) X 方向頻率響應 (b) Y 方向頻率響應(rad/sec) 圖 4.5 輸入不同頻率弦波的頻率響應圖:
4.4 力感測裝置
力感測裝置是用來量測使用者操作力回饋搖桿時所感受的力量變化,並 將力資訊傳回電腦控制單元之中,加上伺服馬達上的位置編碼器,兩者均為 力回饋搖桿重要感測裝置。我們選購日本 NITTA 公司的 JR3 力感測器做為搖 桿的力量感測裝置,並搭配美商 Intel 公司的 8255 I/O Card 作為 JR3 力感測 器和系統的傳輸介面。表 4.5 顯示 JR3 力感測器各軸最大負載量與靈敏度。 方位 最大負載 靈敏度 Force 22 kgf 0.044 kgf X 軸 Moment 170 kgf-cm 0.34 kgf-cm Force 22 kgf 0.044 kgf Y 軸 Moment 170 kgf-cm 0.34 kgf-cm Force 44 kgf 0.088 kgf Z 軸 Moment 170 kgf-cm 0.34 kgf-cm 表 4.5 JR3 力感測器的最大負載量與靈敏度 圖 4.6 表示 JR3 力感測器的方位定義,我們可讀取力感測器 X 與 Y 兩個 方向的讀值,但力感測器的 X、Y 方向由於設計時連接的誤差,與搖桿的運動 方向不一定完全一致,故需對力感測器進行校正實驗,以獲得修正公式。我 們讓搖桿 Y 軸位置固定,只在 X 方向運動,量取力感測器的 X、Y 方向的讀 值繪成圖 4.7 的 X-Y 關係圖,而固定 X 軸讓搖桿在 Y 方向運動得到 X-Y 關係 圖結果與圖 4.7 相差 90 度,但校正方式類似。
圖 4.6 力感測器方位定義
當我們以線性迴歸直線逼近圖 4.7 的每個點,得到的回歸直線斜率約為 -0.9453,而Arctan(-0.9453)= -43.39°,也就是說搖桿的X運動方向與力感測器的 X方向約差了 43.39°左右。 所以實際的搖桿運動X方向量測力量Fx與Y方向量 測力量Fy應由下式修正[35]: cos( 43.39) sin( 43.39) _ _ sin( 43.39) cos( 43.39) _ _ Fx Fs x Fs y Fy Fs x Fs y = − + − = − + − (4.11) 圖 4.8 力感測器方向校正圖
第五章
實驗與討論
為了驗證前面幾章所發展的虛擬操控器軟體控制策略搭配本實驗室自行 開發的硬體模擬系統架構是可行,並符合我們對多功能虛擬操控器的要求, 故必須經由實際的模擬實驗,才能充分地瞭解力回饋搖桿系統所能發揮的最 佳情形。我們選擇 Microsoft Windows 2000 多工的作業系統作為模擬系統的作 業平台,並且為了使系統程式直觀、具有高性能的表現、且又能維護撰寫程 式的一致性,我們使用 C++程序語言達成模擬法則的軟體實現,並且採用 Mircosoft Visual C++ 為程式語言發展的工具,撰寫以下各模擬實驗。 首先我們模擬一個觸碰虛擬牆面的操作感受,要實現一個多功能虛擬 操,牆面所帶給使用者的力回饋感受是不可或缺的基本條件;接著利用各種 虛擬牆面的組合,完成正向、斜向、以及環形等通道模擬實驗;最後,我們 藉由組合以上各種虛擬通道,並結合虛擬阻抗的動態特性,完成一項虛擬扳 手的操作模擬實驗。5.1 虛擬牆
根據 2.2.4 節的介紹,牆面具有運動限制功能的特殊阻抗元件,簡單的說, 牆面能限制物體在二維平面的位移情形並且回饋給使用者施力大小相同,方 向卻相反的反作用力。而基於硬體設備的要求和軟體控制的精密度等種種要 求下,牆面感覺的模擬實驗用一組單向高彈性係數為主並附加高黏滯係數來 配合的效果較合宜,因此我們設定馬達的輸出力為 0 m x F K x B x t ∆ = − ∆ − ∆ > ∆ 當 (5.1) 其中∆x為搖桿侵入牆面的距離、 x t ∆ ∆ 搖桿碰撞牆面瞬間時 X 方向的速度,我 們設定四種彈性係數與黏滯係數的組合,讓使用者移動搖桿來回接觸牆面, 並在平行牆面方向移動,感受接觸牆面時系統模擬的反作用力,圖 5.1 為牆面 實驗時搖桿在虛擬環境中的工作示意圖,圖中右半平面代表一平行 Y 軸座標 的正向虛擬牆,而搖桿對應於虛擬世界的位置以一個質點表示,至於實驗結 果分別為圖 5.2(a)-(d)所示。 圖 5.1 牆面模擬示意圖(a) K=1000 N/m , B=10 N sec/mi
(b) K=1000 N/m , B=20 N sec/mi
圖 5.2 牆面感受實驗:(a) K=1000 N/m , B=10 N sec/mi (b) K=1000 N/m , B=20 N sec/mi (c) K=2000 N/m , B=10 N sec/mi
(c) K=2000 N/m , B=10 N sec/mi (d) K=2000 N/m , B=20 N sec/mi 圖 5.2 牆面感受實驗(continued):(a) K=1000 N/m , B=10 N sec/mi (b) K=1000 N/m , B=20 N sec/mi (c) K=2000 N/m , B=10 N sec/mi (d) K=2000 N/m , B=20 N sec/mi
基本上,接觸虛擬牆面的瞬間可以描述為從小阻抗狀態至極大阻抗的轉 變過程[8],反之亦然。由圖 5.2 的結果中可發現搖桿有侵入虛擬牆內部的情 形,這也是以阻抗元件來模擬牆面必然的現象。在圖 5.2(a)-(b)中由於搖桿移 動單位為公釐(mm),與牆面彈性係數K=1000 N/m的乘積為牛頓(N),此恰與 馬達輸出力單位相同,所以圖中位置資訊(紅線部分)基本上會跟馬達施力 呈現大小相等方向相反的情形;當彈性係數值更高時,則侵入現象較為緩和, 如圖 5.2(c)-(d)所示,將更接近真實牆面,但高彈性係數卻容易造成系統不穩 定現象,所以必須有一高黏滯係數來增加其穩定性,由參考資料[26]得知設定 參數 可模擬較佳的牆面感覺。力感測器讀值(綠 線部分)表示使用者施予力回饋搖桿的力,只要牆面模擬的夠真實,此曲線 就會與馬達施力曲線(藍線部分)的大小越趨近,至於方向則為相反。 K=2000 N/m , B=20 N sec/mi 由於本系統馬達出力最大值約為 19N,而由相關文獻知道人手一般最大出 力可達 66N 以上[33],所以模擬牆面只能有警告限制的作用,並沒有完全限制 運動的能力,若要做到能夠完全阻擋的虛擬牆面,必須使用能夠提供更大轉 距的致動器,若人手施力持續超過馬達的最大出力,將造成馬達不正常工作 而導致損壞,我們可經由軟體上的保護措施,讓馬達在將要輸出超過自己最 大出力前事先給予使用者警訊,並維持出力在臨界值以內來預防此情形發生。
5.2 虛擬通道
通道的概念在於限制運動物體某方面的自由度,讓其在不受限制的區域 內移動,在真實世界中常被應用於導引物體的移動方向上。我們利用此觀念, 並配合前一節的實驗所模擬的虛擬牆操作感受,讓搖桿在虛擬環境中藉由兩 面虛擬牆來模擬通過一個虛擬通道的感覺。5.2.1 正向與非正向通道實驗
當我們以兩面互相平行的虛擬牆對力回饋搖桿的移動做限制,便形成一 正向通道,根據(5.1)式,假設我們欲將搖桿操作在一平行 Y 軸座標的垂直通 道上,可設定 X 軸馬達輸出力公式為: 2 2 T m T x x x F K x B x x t ∆ = − ∆ − ∆ > ∆ < − ∆ 當 或 (5.2) 上式∆x為搖桿侵入牆面的距離, x t ∆ ∆ 搖桿碰撞牆面瞬間時 X 方向的速度,而xT 代表模擬通道之寬度。若要模擬一個平行 X 軸座標的水平通道,則依照類似 的方式可設定 Y 軸馬達輸出力公式: 2 2 T m y y F K y B y y t ∆ = − ∆ − ∆ > ∆ < − ∆ T y 當 或 (5.3) 其中∆y為搖桿侵入牆面的距離, y t ∆ ∆ 搖桿碰撞牆面瞬間時 Y 方向的速度,而 代表模擬通道之寬度,圖 5.3 顯示正向通道的模擬示意圖。 T y 圖 5.3 正向通道模擬示意圖:(a) 平行 Y 軸座標的垂直通道 (b) 平行 X 軸座標的水平通道圖 5.4 記錄了使用者操作搖桿在垂直通道中的運動軌跡和力感操作,我們 設定了參數 K=2000 N/m 帶入模擬系統,由圖 5.4(a)可看出搖桿 大致上在垂直方向運動,但由於彈簧模擬壓縮的影響,實際的通道寬度比設 定的通道寬度還要大;圖 5.4(b)中時間由 0 至 10 秒時因使用者盡量將搖桿操 作在垂直通道上,故馬達的施力很小,幾乎維持在 1 牛頓以下,而在 10 至 15 秒這段期間,使用者刻意將搖桿推向通道限制的方向,由圖中可發現馬達施 力瞬間大幅提高以阻擋搖桿行進方向,使搖桿依然限制在 Y 軸方向運動。 , B=10 N sec/mi (a) 搖桿移動軌跡 (通道寬度x =2mmT ) 圖 5.4 垂直通道實驗:(a) 搖桿移動軌跡 (b) 搖桿位置與受力變化情形

![圖 2.7 利用雙向彈簧阻尼形成的通道 2.4 阻抗模擬精確度 對利用數位取樣的模擬系統來說,由於取樣週期、資料的量化、以及時 間的延遲等使得在模擬真實世界連續系統的物體時,有其模擬的極限,而一 套互動式力回饋設備的性能通常決定於其所能模擬的物體阻抗大小的範圍, 而這個範圍通常被系統本身裝置的物理性質所影響。一方面模擬的阻抗物件 的精確度受到如馬達的非線性輸出以及感測器的解析度等影響,而另一方面 系統的取樣時間、感測器解析度還影響了系統模擬的穩定度[1, 9, 20]。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8397924.179073/27.892.317.597.104.721/系統來範圍個範圍通常被系統本身裝響一方面模擬一方面系統模擬.webp)


![圖 4.3 摩擦力測試曲線(continued):(a) X 軸方向 (b) Y 軸方向 對於搖桿系統的阻抗模型,我們以最基本的頻率響應法(frequency-response analysis)來分析[17,34] ,其優點是以直觀的物理現象來闡釋模型的頻率轉移函數 (transfer function),首先我們定義搖桿單軸的轉移函數 G(s)為 2( ) 1( ) ( )G sX sF s ms bs k=++](https://thumb-ap.123doks.com/thumbv2/9libinfo/8397924.179073/57.892.163.704.134.695/頻率來分其優點是以直觀首先我們定義搖桿單軸轉移函數Gs為+.webp)

